基于RobotStudio的工业机器人分类码垛工作站仿真设计
- 格式:docx
- 大小:34.10 KB
- 文档页数:7

基于 RobotStudio搬运机器人智能工作站仿真设计摘要:本文以ABBIRB2600工业机器人为载体,设计了基于RobotStudio的搬运机器人智能工作站。
该工作站机械部分由自动输送装置、搬运机器人、计数器、扫描仪组成。
软件部分选用DSQC651通讯板卡设置I/O信号,通过示教器编写运动指令、赋值指令、条件判断指令,进行搬运控制。
利用事件管理器控制吸盘的进气与充气信号,完成货物抓取与释放的搬运工作。
最后,通过TCP跟踪功能,完成搬运系统的轨迹检验,确保搬运工作的流畅性。
搬运机器人工作站的设计有效的提升了企业的工作效率,缓解用人压力。
关键词:搬运机器人;RobotStudio;工作站;AGV中图分类号:TG409 文献标识码:A目前,中国制造业的“人口红利”不断消失,劳动力价格逐渐上涨,在机械、电子、物流等劳动强度大的企业,招工难成为了阻碍发展的头等问题[1]。
传统的物流搬运模式,是依靠人工进行扫码、计件、搬运、装车的作业方式,花费时间长,高负荷的重复性操作,会导致劳动效率低且易出现工作事故[2]。
为了帮助企业解决人力不足、生产效率低的问题,发展具有灵活性高、通用性强、工作可靠的搬运机器人已成为必然趋势。
搬运机器人通常是指在某一工作环境下,通过一定的程序控制,实现自身运行以及货物的自动抓取与释放,进而完成相应的搬运任务[3]。
搬运机器人的路径规划与控制系统的研究,对加快货物入库、出库速度,提升自动化水平具有十分重要的意义。
1搬运机器人智能工作站的实现1.1RobotStudio仿真平台ABB公司的RobotStudio离线编程仿真软件,具有CAD导入、机器人离线示教编程、动态仿真等功能,可以在离线的情况下进行机器人轨迹规划及程序编写[3]。
离线编程软件中的机器人本体参数、控制器都与实际是一样,I/O仿真信号、指令程序、控制信号与实际机器人在生产线运行也是一致。
因此,RobotStudio软件编写的程序可以导入到现场工业机器人中运行,从而模拟真实的工作环境,实现仿真测试,用于方案验证[4]。


机 电 工 程 技 术 第49卷 第08期MECHANICAL&ELECTRICALENGINEERINGTECHNOLOGY Vol 49 No 082020-04-07 DOI:10 3969/j issn 1009-9492 2020 08 066 赵锡恒.基于RobotStudio的工业机器人装配工作站仿真应用[J].机电工程技术,2020,49(08):204-206基于RobotStudio的工业机器人装配工作站仿真应用赵锡恒(广州市轻工职业学校,广州 510650)摘要:针对装配工作站在ABB机器人仿真软件RobotStudio出现的仿真问题,提出2种仿真技术,在不影响既有工作站流程的前提下,通过构建并运用Smart组件合理地解决因软件及其仿真机制衍生的问题,第1种技术修正传送带工件偏移,第2种技术优化装配环节。
仿真结果表明,2种仿真技术能有效提升装配工作站的仿真质量及仿真精度,完善仿真流程。
关键词:装配工作站;RobotStudio;Smart组件中图分类号:TP242 文献标志码:A 文章编号:1009-9492(2020)08-0204-03TheSimulationApplicationsofIndustrialRobotAssemblingWorkstationBasedonRobotStudioZhaoXiheng(GuangzhouLightIndustrySchool,Guangzhou510650,China)Abstract:AddressingtothesimulationproblemsforABBrobotsoftwareRobotStudiooftheassemblingworkstation,twosimulationapproacheswereproposed.Onthepremiseofnotaffectingtheprocessoftheexistingworkstation,theproblemsderivedfromthesoftwareanditssimulationmechanismcouldbereasonablysolvedbybuildingandusingsmartcomponents.Thefirsttechnologycorrectedtheoffsetoftheconveyorbeltworkpiece,andthesecondtechnologyoptimizedtheassemblyprocess.Thesimulationresultsshowthatthetwosimulationtechnologiescaneffectivelyimprovethesimulationqualityandaccuracyofassemblyworkstation,andimprovethesimulationprocess.Keywords:assemblingworkstation;RobotStudio;Smartcomponent0引言工业机器人作为智能制造的重要组成部分,在传统工厂向智能化工厂的改造过程中扮演着重要的角色,目前在全球工业机器人生产商中,以瑞典ABB、德国KUKA、日本FANUC和安川电机YASKAWA最为有名,并称工业机器人四大家族,在中国的市场份额占据70%以上,被广泛应用于焊接、搬运、喷涂等行业[1]。

基于RobotStudio的机器人搬运码垛虚拟仿真平台
邓华军;段月红;卢培文
【期刊名称】《自动化与信息工程》
【年(卷),期】2023(44)1
【摘要】以机器人搬运码垛平台为研究对象,通过SolidWorks软件建立该平台的三维模型;利用RobotStudio软件设计动态物料输送链、动态快换工具和动态真空吸盘3个Smart组件,分别用于模拟机器人搬运码垛平台的物料运动、吸取/释放物料和装载/卸载吸盘,并虚拟仿真机器人搬运码垛的工作过程。
仿真结果表明:该虚拟仿真平台可以准确地模拟机器人搬运码垛平台的动态效果,顺利地完成预定的工作程序,达到与真实平台相同的搬运码垛效果。
【总页数】6页(P27-32)
【作者】邓华军;段月红;卢培文
【作者单位】赣州职业技术学院
【正文语种】中文
【中图分类】TP249
【相关文献】
1.基于RobotStudio的机器人码垛工作站虚拟仿真设计
2.基于RobotStudio的机器人码垛工作站虚拟仿真设计研究
3.基于RobotStudio的搬运码垛工作站仿真设计
4.基于RobotStudio的工业机器人虚拟仿真实验平台设计及实现
5.基于RobotStudio的码垛机器人工作站仿真设计
因版权原因,仅展示原文概要,查看原文内容请购买。
机床与液压MACHINE TOOL & HYDRAULICS 2019年11月第47卷第21期Nov. 2019Vol. 47 No. 21DOI : 10.3969/j. issn. 1001-3881.2019. 21. 007本文引用格式:孙立新,高菲菲,王传龙,等.基于RobotStudio 的机器人分拣工作站仿真设计[J].机床与液压,2019,47( 21):29-33.SUN Lixin , GAO Feifei , WANG Chuanlong , et al.Simulation Design of Robot Sorting Workstation based on RobotStudio[J].Machine Tool & Hydraulics,2019,47(21) :29-33.基于RobotStudio 的机器人分拣工作站仿真设计孙立新,高菲菲,王传龙,杨兴宇(河北工业大学机械工程学院,天津300400)摘要:以工业机器人分拣工作站为研究对象,针对其轨迹规划和自动化生产协调难度大的问题,提出ABB 机器人仿真 软件RobotStudio 应用于工业机器人自动分拣工作站中。
进行三维实体建模并构建布局,运用ABB 的Virtual Controller 技术, 导入到RobotStudio,搭建了自动分拣工作站的三维实体模型及整体布局。
对手爪气缸Smart 组件进行了子组件的添加及属 性设置,创建了机器人I/O 信号及连接方式,通过时间管理器仿真气缸的不同姿态动作,设定了机器人和手爪气缸之间的 工作站逻辑关系,完成了机器人工作站的离线编程和仿真。
为机器人分拣工作站的设计与制造提供了技术参考和可行性依 据,可降低生产线设计及调试成本,并可用于指导现场生产。
关键词:RobotStudio;事件管理器;Smart 组件;离线编程中图分类号:TP391Simulation Design of Robot Sorting Workstation Based on RobotStudioSUN Lixin , GAO Feifei , WANG Chuanlong , YANG Xingyu(School of Mechanical Engineering , Hebei University of Technology , Tianjin 300400, China)Abstract : Taking the industrial robot sorting workstation as the research object , aiming at the difficulty of its trajectory planning and automatic production coordination , the application of ABB Robot Simulation software RobotStudio in the industrial robot automatic sorting workstation is proposed. The Three Dimensional ( 3D) entity model and layout were built. The virtual controller technology of ABB was used to import it into RobotStudio , and the 3D entity model and overall layout of the automatic sorting workstation were built. Smart component of hand claw cylinder was added of sub-components and set of attributes to create robot I/O signal and connection mode , to simulate different gesture actions of cylinder through time manager , and to set logical relationship between robot and hand claw cylinder. Off-line programming and Simulation of machine manual workstation were completed. It can provide technical reference and feasibility basis for the design and manufacture of robot sorting workstation , reduce the cost of production line design and debug ging, and guide the field production.Keyword : RobotStudio ; Event manager ; Smart component ; Off-line programming0前言工业机器人的应用可以提高工业生产自动化水 平,突破技术和成本限制⑴。
用robotstudio设计视觉码垛机器人目标识别与抓
取设计
1. 首先,在robotstudio中创建一个新项目并添加要使用的机器人模型。
2. 将相机或传感器添加到机器人中,以便机器人可以检测和识别工件。
3. 在robotstudio中创建一个新任务,并将其命名为“视觉码垛机器人目标识别与抓取”。
4. 在该任务的工具栏中,选择“Vision”选项卡,并添加要使用的视觉软件和相机。
5. 在“Vision”选项卡中,通过设置参数配置视觉软件和相机,如使用的图像分辨率,触发方式等。
6. 根据需要创建一个新的程序,用于控制机器人在工作空间中的移动和抓取操作。
7. 在程序中使用视觉软件来检测和识别工件。
这可以通过添加程序模块来完成,该模块使用基于视觉的函数和命令。
8. 根据工件的位置,使用机器人控制程序来移动机器人,并将其手臂放置在正
确的位置。
9. 然后使用机器人控制程序来进行抓取操作,将工件放置在指定位置。
10. 调试和测试机器人操作并在需要的情况下进行修改。
完成后保存程序并将其上传到机器人控制器中。
基于RobotStudio的机器人码垛工作站虚拟仿真设计郝建豹;许焕彬;林炯南【摘要】介绍一种利用SolidWorks和RobotStudio构建机器人码垛工作站的虚拟仿真方案.首先,利用SolidWorks设计传送带等工作站的三维仿真模型,分析构建码垛工作站的基本流程;其次,创建仿真运行I/O信号和动态Smart组件;最后,离线编制了机器人码垛仿真程序.仿真结果表明,该虚拟码垛工作站可实现码垛作业.【期刊名称】《自动化与信息工程》【年(卷),期】2017(038)002【总页数】4页(P26-29)【关键词】SolidWorks;RobotStudio;码垛工作站;虚拟仿真【作者】郝建豹;许焕彬;林炯南【作者单位】广东交通职业技术学院机电工程系;广东交通职业技术学院机电工程系;广东交通职业技术学院机电工程系【正文语种】中文工业机器人作为现代工业的三大支柱之一,广泛应用于食品、化工、医药包装等行业。
码垛机器人作为包装线的后续设备,将包装袋按照预定的编组方式、逐个逐层码放在托盘或箱体内,能极大地提高生产能力和转运能力。
随着物流自动化技术领域的扩大,码垛机器人应用场合也逐渐在扩大[1]。
当前,应用于生产的机器人系统大多采用示教再现编程方式,而示教再现编程在实际生产应用中存在精度靠目测、效率低等问题[2-4]。
为提高编程效率,使编程者远离危险的工作环境,改善编程环境,可采用机器人虚拟离线编程[5]。
其基本思想是利用离线仿真技术,构造虚拟机器人及其工作环境;在虚拟模型中引入机器人和场景,同时操作者能够操纵机器人在场景中移动,可以选择不同的观察角度,从不同的侧面观察机器人的运动情况;可以在计算机屏幕上引导虚拟机器人末端执行器运动,进行虚拟在线示教,产生机器人作业轨迹,由此生成机器人语言程序,将编辑好的程序保存在PC机上,并传送给机器人控制器。
本文以六自由度关节型机器人IRB120为研究对象,运用SolidWorks软件建立码垛工作站的三维实体模型,导入RobotStudio中,并进行仿真,为机器人编程和调试提供安全灵活的环境,提高编程效率,指导现场生产,在一定程度上提高了现场操作人员的安全性,减轻了现场调试的工作量。
2020年第06期基于R o b o D K 的工业机器人搬运工作站仿真设计李 慧山西工程职业学院,山西太原,030009摘 要 随着工业机器人研究的不断深入和机器人技术的不断发展,其仿真系统作为机器人设计和研究过程中安全可靠㊁灵活方便的工具,发挥着越来越重要的作用㊂利用仿真软件R o b o D K 对工业机器人的搬运应用进行仿真,通过设计P r o g r a m 程序和P yt h o n 程序实现了多功能工业机器人实训系统简单搬运的仿真过程,优化了工作流程和工业机器人等设备的工作状态㊂关键词 工业机器人;R o b o D K ;搬运;仿真中图分类号 T P 242.2D O I 10.19769/j .z d h y.2020.06.0280引言20世纪70年代之后,随着计算机技术㊁控制理论技术㊁视觉技术以及人工智能的快速发展,机器人技术也进入了高速发展的新阶段,成为多门学科汇集而成的高新技术[1-2]㊂一定程度上来讲,机器人应用水平的高低反映了一个国家工业自动化水平的高低[3],而工业机器人行业已经成为未来工业发展的核心领域[4]㊂就目前的机器人发展情况来看,国外在早前就已经开始研发工业机器人,尤其是工业机器人模拟仿真技术研发起步明显较早[5],同时各国已经陆续研发了不同类型的离线编程仿真软件,其中主要的有瑞典A B B 公司的R o b o t S t u d i o 软件㊁日本F A N U C 的R O B O G U I D E ㊁西门子的R O B C A D 等[6]㊂这些软件的开发和应用也为工业机器人的柔性生产线仿真设计提出了新型的㊁可靠的解决思路[7]㊂与此同时,近年来我国科学技术迅猛发展,工业机器人在我国制造行业中的应用领域越来越广泛,越来越多的科研人员和研发工作者都加入工业机器人的相关研究当中,因此我国在工业机器人这方面的技术也得到了显著的提升㊂但是从我国当前的整体研究水平来看,我国的机器人生产线设计㊁改造㊁检修㊁监控以及产品的制造控制等方面的技术还存在着较大的缺陷和滞后现象,严重地阻碍了我国工业机器人技术的前进与发展[8]㊂因此,在虚拟的计算机环境中对工业生产环境中的各部件以及生产过程进行相当程度的仿真,能最大限度地对仿真软件中的工作站进行虚拟的仿真测试,而且还能够优化生产过程,此技术大大地降低了工业设备的投资风险[9]㊂R o b o D K 仿真软件相比其他离线仿真软件(例如R o -b o t S t u d i o ),其具有诸多优势,不仅可支持A B B ㊁K U K A ㊁F A N U C ㊁安川㊁柯马㊁汇博㊁埃伏特等多种品牌机器人的离线仿真,而且仿真功能全面,为用户生成离线程序㊁体验机器人的功能实现过程提供了一个更加安全有效的工具和保障㊂在实际工业机器人工作站安装之前,在仿真软件中对真实的机器人工作站进行离线编程,能够更好地调试实现工业机器人搬运应用中的各项功能[10]㊂以下将利用图解的形式,创建简单的搬运工作站,实现搬运工作站的功能㊂主要内容包含R o b o D K 仿真软件的基础操作㊁工作站建模㊁仿真程序编程㊁离线程序㊂1多功能工业机器人实训系统多功能工业机器人实训系统包含了多个搬运功能模块,以下采用搬运模块一建立简单搬运仿真工作站㊂该搬运工作站完成的工作任务是利用I R B 120机器人将搬运模块一中的工件从盒子中取出,放置到指定位置,如图1所示㊂图1 工业机器人简单搬运应用2模型导入及布局在创建仿真工作站之初,首先应该将搬运工作站所需要的三维模型全部导入㊂该简单搬运工作站需要导入的模型包括工作台w o r k s t a t i o n ㊁机器人㊁工具㊁红色工件㊁蓝色工件以及黄色工件模型㊂模型坐标值如表1所示,导入后的模型整体布局如图2所示㊂67收稿日期:2020-04-08基金项目:山西省科技厅重点研发计划基金项目(N o .201803D 121073)㊂作者简介:李慧(1992 ),女,山西阳泉人,硕士,助教,研究方向为工业机器人控制与操作技术㊁电子信息技术㊂2020年第06期 表1 模型坐标值对象名坐标值w o r k s t a t i o n [0,0,0,0,0,0]机器人坐标系[0,0,0,0,0,0]工具坐标系(T C P )[0,0,250,0,0,0]工件r e d [-230,353,80,90,0,0]工件b l u e [-199,353,80,90,0,0]工件y e l l o w[-243,326,80,90,0,0]图2 模型整体布局3P r o gr a m 仿真程序该仿真工作站需要添加的程序指令包括:设置工具坐标系指令,设置工件坐标系指令,设置机器人速度指令㊁运动指令㊁暂停指令㊁抓取和放置指令,设置信号指令㊁等待指令㊂以下仅示范搬运红色工件的程序指令添加步骤,蓝色工件和黄色工件的仿真程序指令与红色工件基本相同㊂3.1创建抓取和放置目标点表2 目标点坐标值目标点名目标点坐标值p R e d P i c k A p p [-230,353,145,-90,0,180]pR e d P i c k [-230,353,95,-90,0,180]p R e d P u t A p p [-233,413,125,-90,0,180]pR e d P u t [-233,413,35,-90,0,180]p B l u e P i c k A p p [-199,353,145,-90,0,180]pB l u e P i c k [-199,353,95,-90,0,80]p B l u e P u t A p p [-185,413,125,-90,0,180]pB l u e P u t [-185,413,35,-90,0,180]p Y e l l o w P i c k A p p [-213,326,145,-90,0,180]pY e l l o w P i c k [-213,326,95,-90,0,180]p Y e l l o w P u t A p p [-112,413,125,-90,0,180]p Y e l l o w P u t [-112,413,35,-90,0,180]jH o m e [0,0,0,0,90,0]吸盘工具抓取和放置工件时都是垂直于工件运动的,为贴近实际生产情况,在仿真过程中需要添加预抓取点和预放置点,也就是在机器人抓取和放置之前需要在目标点上方安全处设立预备点㊂也就是说,三个工件的抓取和放置需要创建12个目标点,以及1个机器人初始姿态目标点,共13个目标点,目标点坐标值如表2所示(p 开头为笛卡尔坐标型目标点,j 开头为关节型目标点)㊂注意:坐标值上方的下拉菜单可选择不同机器人的坐标表示方法,一般坐标表示方法后面三项分别为对象相对于工作站坐标系x y z 轴旋转的角度;上述坐标值选择适用于 K U K A /N a c h i /A B B 机器人的坐标表示方法,区别在于后面三项是分别表示对象围绕自身的z y x 轴旋转的角度,如图3所示㊂图3 创建目标点3.2添加程序指令P r o g r a m 程序需要添加的指令包括:设置工具㊁机器人速度㊁工件坐标系㊁初始化工件位置以及机器人移动指令㊂操作步骤如下:(1)创建P r o gr a m 程序,按 F 2 或鼠标右键改名为h a n d l i n g ㊂(2)添加设置工具指令 S e t T o o l F r a m e i n s t r u c t i o n,关联至 G r i p pe r ,如图4所示㊂图4 设置工具(3)添加设置速度指令 S e t S pe e d I n s t r u c t i o n ,并设置机器人运动速度为100mm /s,如图5所示㊂图5 设置工件初始位置(4)工件位置初始化:首先要设置工件的初始位置,772020年第06期即将红色工件置于初始位置,然后在程序中添加工件初始位置指令,即 S i m u l a t i o n E v e n t I n s t r u c t i o n ,选择 S e to b je c t p o s i t i o n (r e l a t i v e ) ,选择红色r e d 工件,初始化工作便于在仿真过程中随时调用该条指令使工件返回初始位置,如图5㊂(5)右键点击 06 s t a t i o n p a r a m e t e r s,添加工作站参数 S i m u l a t i o n S t a r t,参数值设为1,如图6所示㊂图6 添加工作站参数(6)添加等待信号指令 S e t o r W a i t I /O I n s t r u c -t i o n w a i t f o r d i g i t a l i n pu t , I /O N a m e :S i m u l a t i o n -S t a r t , I /O V a l u e :1,即信号输入为1时仿真工作站开始进行搬运工作㊂(7)添加 M o v e J o i n t I n s t r u c t i o n 指令,关联至 jH o m e ,确保机器人能够返回初始位置,自动添加 S e t R e f e r e n c e F r a m e I n s t r u c t i o n ,关联至 A B B I R B 120-3/0.6B a s e ;添加机器人移动语句时要注意:R o b o D K 会默认新建一个目标点,这就带来一个问题,每次调用移动语句都会创建一个目标点㊂操作人员可以有两种处理方式:一是使用预先定义好的目标点,然后将生成的新目标点删除;二是修改调用移动语句生成的新目标点,使之成为想要的目标点㊂这两种方法都可以达到同样的目的,通常采用预先定义好目标点,然后在移动语句中调用该目标点㊂(8)抓取动作:添加 M o v e J o i n t I n s t r u c t i o n ,关联至 p R e d p i c k A p p ;添加 M o v e L i n e a r I n s t r u c t i o n ,关联至 p R e d pi c k ,如图7所示㊂图7 实现抓取动作(9)添加 S i m u l a t i o n E v e n t I n s t r u c t i o n A t t a c ho b j e c t ㊂(10)添加 P r o g r a m C a l l I n s t r u c t i o n I n s e r t c o d e ,输入 S e t D 652_10_D 02; ,表示设置I O 信号D 652_10_D 02 为 O N ,电磁阀工作,工具抓取工件㊂(11)添加 P a u s e I n s t r u c t i o n ,暂停时间为1000m s㊂(12)添加 M o v e L i n e a r I n s t r u c t i o n ,关联至 pR e d -p i c k A p p㊂(13)放置动作:添加 M o v e J o i n t I n s t r u c t i o n,关联至 p R e d p u t A p p;添加 M o v e L i n e a r I n s t r u c t i o n ,关联至 p R e d pu t ,如图8所示㊂图8 实现放置动作(14)添加 S i m u l a t i o n E v e n t I n s t r u c t i o n D e t a c ho b j e c t ㊂(15)添加 P r o gr a m C a l l I n s t r u c t i o n I n s e r t c o d e ,输入 R e s e t D 652_10_D 02; ,表示设置I O 信号D 652_10_D 02 为 O f f,电磁阀停止工作,工具放置工件㊂(16)添加 P a u s e I n s t r u c t i o n ,暂停时间为1000m s;添加 M o v e L i n e a r I n s t r u c t i o n ,关联至 p R e d p u t A p p;添加 M o v e J o i n t I n s t r u c t i o n ,关联至 jH o m e ,如图9所示㊂图9 机器人返回原点至此,P r o gr a m 程序已经设置完成,然后双击程序即可搬运红色工件㊂4P yt h o n 仿真程序基于P yt h o n 的R o b o D K A P I 能够创造机器人和机构的仿真模型,也能为机器人生成特定品牌的项目㊂R o -b o D K 支持基于P yt h o n A P I 的机器人离线仿真,即R o -b o D K 扩展P y t h o n A P I 提供很多接口函数,通过这些接口函数可以实现更为复杂的机器人应用仿真㊂也就是说,除上述通过添加指令的方式构建P r o g r a m 程序实现搬运功能,还可以利用P y t h o n 语言编写程序代码,简化设计思路㊂具体如下:f r o m r o b o l i n k i m po r t * #A P I t o c o mm u n i c a t e w i t h R o b o D Kf r o m r o b o d k i m p o r t * #b a s i c m a t r i x o pe r a t i o n s R D K =R o b o l i n k () #定义R o b o l i n k 的类对象#定义工作站中的对象87i W o r k s t a t i o n=R D K.I t e m('06',I T E M_T Y P E_ S T A T I O N) #定义整个工作站i R o b o t=R D K.I t e m('A B B I R B120-3/0.6',I T E M_ T Y P E_R O B O T) #定义机器人i T o o l=R D K.I t e m('G r i p p e r',I T E M_T Y P E_ T O O L) #定义工具i F r a m e=R D K.I t e m('A B B I R B120-3/0.6B a s e',I-T E M_T Y P E_F R AM E) #定义工件坐标系i R e d P a r t=R D K.I t e m('r e d',I T E M_T Y P E_O B-J E C T) #定义工件#定义机器人目标点j H o m e=R D K.I t e m('j H o m e',I T E M_T Y P E_T A R-G E T) #定义机器人初始目标点p R e d P i c k A p p=R D K.I t e m('p R e d P i c k A p p',I T E M_ T Y P E_T A R G E T) #定义预抓取目标点p R e d P i c k=R D K.I t e m('p R e d P i c k',I T E M_T Y P E_ T A R G E T) #定义抓取点p R e d P u t A p p=R D K.I t e m('p R e d P u t A p p',I T E M_ T Y P E_T A R G E T) #定义预放置目标点p R e d P u t=R D K.I t e m('p R e d P u t',I T E M_T Y P E_ T A R G E T) #定义放置点#初始化工件位置d e f r P a r t I n i t():i R e d P a r t.s e t P a r e n t(i W o r k s t a t i o n)i R e d P a r t.s e t P o s e(t r a n s l(-230,357,80)*r o t x (p i/2))#设置机器人工具坐标系和速度###################### ##主程序################### ##i R o b o t.s e t P o s e T o o l(i T o o l) #设置工具i R o b o t.s e t S p e e d(30,1000,20,40)#设置机器人的速度#机器人抓取和放置工件程序i R o b o t.s e t P o s e F r a m e(i F r a m e)#设置工件坐标系r P a r t I n i t() #调用自定义函数i R o b o t.M o v e J(j H o m e) #机器人移动到初始位置i R o b o t.M o v e J(p R e d P i c k A p p) #机器人移动到红色工件预抓取位置i R o b o t.M o v e L(p R e d P i c k)#机器人移动到红色工件抓取位置i T o o l.A t t a c h C l o s e s t() #抓取工件i R o b o t.M o v e L(p R e d P i c k A p p) #机器人移动到红色工件预抓取位置i R o b o t.M o v e J(p R e d P u t A p p)#机器人移动到红色工件预放置位置i R o b o t.M o v e L(p R e d P i c k)#机器人移动到红色工件放置位置i T o o l.D e t a c h A l l(i F r a m e) #放置工件i R o b o t.M o v e L(p R e d P u t A p p) #机器人移动到红色工件预放置位置i R o b o t.M o v e J(j H o m e) #机器人移动到初始位置编程时通常需要先将机器人的工具和工件坐标系设定好,一旦工具和工件坐标系确定好了,之后的程序目标点都将采用此工具和工件坐标系(关节坐标类型的目标点除外)㊂5结语在科技高速发展的今天,工业机器人在工业制造中起到的作用越来越重大,而且未来也将继续推动我国工业化的进程[1]㊂虽然我国现有研发的机器人设备已经有一些编程软件,但是这些软件基本上都是应用于工业机器人的现场编程调试,在离线编程等方面的研究并不深入㊂本文在R o b o D K软件中分别应用P r o g r a m程序和P y t h o n程序实现了多功能工业机器人实训系统简单搬运的仿真应用㊂相对现有的仿真软件而言,R o b o D K仿真软件扩展性强,仿真功能全面,关键是适配市场上多种品牌的机器人离线仿真,此外还可以进行二次开发,能够为机器人仿真和生产过程集成提供强有力的帮助㊂参考文献[1]李健.多自由度机器人的设计与研究[D].合肥:中国科学技术大学,2009.[2]黄晨华,张铁,谢存禧.工业机器人位姿误差建模与仿真[J].华南理工大学学报(自然科学版),2009,37(8): 65-70.[3]孙英飞,罗爱华.我国工业机器人发展研究[J].科学技术与工程,2012,12(12):2912-2918.[4]H o l u b e k R,D e l g a d o S o b r i n o D R,K ošt'ál P,e t a l.O f f-l i n e p r o g r a mm i n g o f a n A B B r o b o t u s i n g i m p o r t e d C A D m o d e l s i n t h e R o b o t S t u d i o s o f t w a r e e n v i r o n m e n t[C]// A p p l i e d M e c h a n i c s a n d M a t e r i a l s.T r a n s T e c h P u b l i c a-t i o n s,2014,693:62-67.[5]衣勇,宋雪萍.机器人仿真研究的现状与发展趋势[J].机械工程师,2009(7):63-65.[6]毛暖思.基于R o b o t S t u d i o的工业机器人柔性制造生产线的仿真设计[J].电子测试,2019(2):5-8.[7]陈伟华.工业机器人笛卡尔空间轨迹规划的研究[D].广州:华南理工大学,2010.[8]王智兴,樊文欣,张保成,等.基于M a t l a b的工业机器人运动学分析与仿真[J].机电工程,2012,29(1):33-37.[9]罗杰.码垛搬运机器人的设计与仿真分析[D].西安:长安大学,2018.[10]白蕾,侯伟,张小洁.基于R o b o t S t u d i o的机器人搬运工作站设计与仿真[J].国外电子测量技术,2018,37(6): 114-118.[11]陈廷艳,彭一航,许二娟,等.仿真软件在工业机器人示教及再现教学中的应用研究[J].轻工科技,2018,34(6): 74-75.972020年第06期。
基于RobotStudio的工业机器人分类码垛工作站仿真设计摘要:随着我国工业的快速增长与发展,机器人设备和工作站的空间、精度需求的日渐提高,工业机器人工作站已经是一种融合了信号控制技术、传感器控制技术、精密传动技术、数字传动控制技术等于一身的综合性高端电子产品,工业机器人工作站的设计也必须充分考虑占用空间、摆放地方等各种因素。
利用工程软件,在虚拟环境中模拟,就能够达到较为合理、经济、高效的配置,从而有效减少风险。
本文以基于RobotStudio的工业机器人分类码垛工作站,开展仿真设计研究。
关键词:RobotStudio;分类码垛工作站;仿真设计在工业生产中,有很多重复的动作,如组装、搬运、包装等。
随着劳动力成本的增加,工程机械设备在这些场合中更为常用,尤其是码垛作业,其重点是最后一道工序的生产,因为产品种类繁多,而且体积小、重量大,使手动操作效率下降,风险更大。
因此,引进工业机器人作为码垛过程,利用它根据预先设定的码垛方式,逐步在生产线上提取原料,再安装到托盘或其他载体上,无须人工作业,这极大地提高了工作效率和稳定性,也大大降低了成本。
对工业码垛机器人而言,若采取示教再现的现场编程方法,会存在准确度低、效率低下、后期维修复杂等问题。
所以,为提高编程效能,使工程师减少危险的运行状况,从而增强编程实力,工业自动化机器人虚拟离线编程得到了广泛应用。
不过许多时候离线编程系统并不能考虑到现实状况,例如性能,堆叠模式等。
主要思路就是通过离线仿真技术构建虚拟机器人的基本运行环境。
在虚拟现实模式下,系统能够引入工业机器人的现实运行状况,同时基本运行系统也能够控制工业机器人在现实环境中运行,从而可以在不同的观察角度上观察工业机器人的实际工作状态。
还能够实现通过引入虚拟机器人的末端执行器在计算机屏幕显示器上的运动,从而才能最终真正实现虚拟机器人的远程控制,并最终可以实现生成一个虚拟工业机器人的一个基本的运行轨迹。
由此可以进行人工智能程序设计,并可以把编制好的教学程序保存到PC机上,再传送给人工智能控制器。
一、码垛机器人1.1码垛机器人概述码垛机器人是一个能够手动进行工作的机器设备。
在应用上,能够接收人的命令,并能够及时执行预先安排好的步骤。
它是根据计算机自己设计的原理程序操作,将已经放入容器的东西放在托盘、货箱的上面,按照相应的排列程序,实现自动堆码。
可多层堆积,然后推出,方便叉车运送到库房储存。
其目的是辅助或代替一些重复性的、费力的工作,如生产、施工等。
码垛机器人可以集成的方式连接安装到工厂或任何一个自动化的生产线上,为工厂自动化流水线生产的作业以及现场的生产操作提供具有高度的智能化、机器人化操作水平的网络化。
可同时用于实现国内外各类瓶装啤酒、饮料、食品行业内等各种食品加工和作业现场货物的全程自动包装码垛物流,广泛应用于加工制造各式纸箱、塑料盒、瓶、袋、桶、薄膜类的预包装产品、灌装产品。
1.2码垛机器人的特点码垛机器人是机械工程和计算机程序有机融合的成果,为现代制造业提供了优秀的生产品质。
码垛机器人在码垛领域有十分普遍的使用,极大节约了劳动强度和空间。
其主要特征包括:(1)结构简单、零部件少,因此零部件产品的总体故障率相对低、性能平稳可靠、保养及维修方式简单、所需的库存零部件比较少。
(2)占地面积少,有利于客户厂房规划建设,并在同时还可为保证客户留出较大的库房面积。
(3)适应性好。
当其产品的尺寸、重量、形状和托盘的外形尺寸改变时,仅须在触控式上稍加修改即可,不会影响其他正常工作运行。
(4)能耗低。
通常机械堆垛机的主功率在26KW左右,而自动堆垛机机器人的单台功率在5KW左右,大大降低了客户系统的整体运营投资成本。
(5)可实现全面控制,通过在控制柜屏幕显示器上进行操作控制即可,操作也非常轻松简单,只需正确定位控制抓牢起点位置和摆放点,示教方法也简单而易懂。
二、RobotStudio虚拟仿真软件RobotStudio的虚拟仿真应用是由ABB公司研发,属于PC应用,可以在整个ABB的所有企业机器人上应用,也可以进行企业机器人单元创建、离线创建以及虚拟仿真应用。
在实际进行的工业机器人控制系统方案设计工作中,也可以通过利用该软件延时的离线模拟,进而也可以对已制定好的控制器进行设置。
通过利用该软件,既可以完成对CAD文档的输入,也可以完成路径的自主生成与伸展,并实现对碰撞检测的虚拟仿真,从而为设计的二次开发奠定基础。
此外,由于它所给出的工业机器人平台可以和实际场景相对应,所以通过程序设置工作站和完成工业机器人调试可以直接进行现场使用。
三、基于RobotStudio的机器人码垛工作站虚拟仿真设计3.1工作站布局分析机器人工作站产品的内部机械布置使用了RobotStudio,并采取以PLC为设计核心的机械控制布置方法。
电控箱直接放在机器人生产线的外壳外面。
ABB-IRB2600码垛机器人用于生产工作站产品码垛机械,工作范围1.65米,容量12公斤。
末端执行器上安装的真空吸盘也可以自行吸附周转箱,从而可以直接使用滚筒输送链运输商品。
当产品送到交付端时,传感器将被作为测量信息,然后反馈给机器人,机器人就可以进行真正的空位和吸收产品。
在机器人按照规定的时间内完成了相应的数量产品托盘运送过程之后,机器人就将立即产生一个停止的动作信息,由一台AGV车自动将所有空产品托盘自动运走,从而可以展开机器人下一工作阶段中的工作。
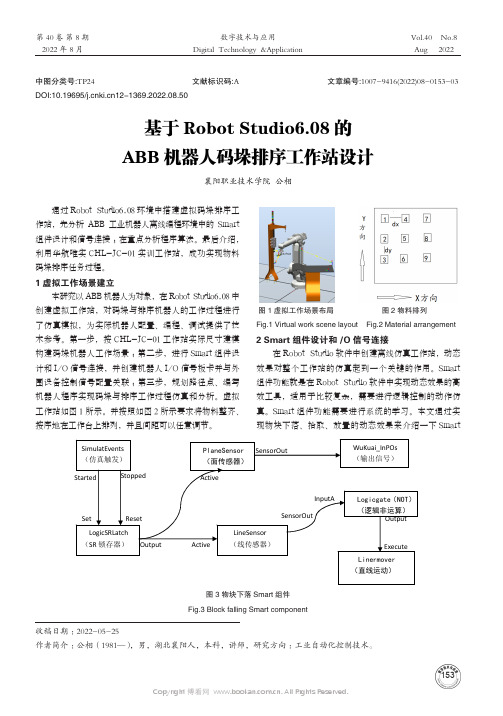
3.2输送链Smart组件的添加及信号连接3.2.1 Smart组件概述Smart组件是RobotStudio的一个仿真功能,专门被用来设计和仿真ABB机器人,所以无论在此设计工作中的技术理论基础与应用层面上都会有着相当好的设计开发或应用及推广实践价值。
通过Smart实现货物信息在传输链路传输中的实时动态模拟。
3.2.2输送链Smart组件的添加通过添加Smart组件,来模拟产品在输送链运行中的动态效果。
增加Source组件是指建立产品的拷贝,产生出产品的复制品可再通过增加一个Queue组件来再次完成组的建立动作,使之其拥有一种共同的动态属性;当Linear-Mover组件的控制状态要求下执行在输送链路末端时,周转箱组件将直接和末端Plane Sensor组件之间形成接触,面传感器也将发出信号。
增加了Logic Gates的[NOT](逻辑反)模块,可以实现信号的反转动作,这是因为ABB机器人无法在高频信号输入与低频输出的信号之间快速转换期间进行触发动作。
不过,若使用逻辑反转将高频信号直接转化为低频信号,则将会引起开关动作,因此通过添加Simulation Events元件,使之可以使传感器在测试模拟的过程的开始测试时,以及在测试的过程终止测试时的其他一些特殊情况下都仍然可以连续的产生脉冲信号,从而触发LogicSRLatch元件并依次进行置位的移动和复位的操作,从而使其在被测试模拟过程的状态环境中,与Source元件一起产生复制件。
3.2.3输送链I/O信号设置创建一组InPos和PalletInPos数字输出信号,用来表示发送测量周转箱速度和托盘到达率的信息。
设置值均为零,可以用来连接机器人和AVG汽车。
传输链生成的I/O信息和逻辑值如表1所示。
表1输送链I/O信号名称3.3.3 Smart组件输送链信号连接Smart组件的连接主要采用信号连接方式,连接主要分为信号设置和连接两个阶段。
具体情况如下。
(1)传动链Smart组件之间的连接都需要通过信号输入来实现设置,I/O信号输入的信号输入则将主要有效地提供用作连接的信号,在此的基础结构上,信号输出可以同时被用来直接分别放置在货物周转箱里和货物托盘上。
两组输出信号之间的逻辑初始值通常都是或大于为0,信号输出传递的另外两组功能端则分别设为是码垛机器人和是AGV小车。
(2)传输链的Smart组件连接到信号连接,主要用于创建工作站信号,并与上述Smart组件交互。
首先,将Simulation Events模块,它将能够在模拟启动或终止过程中产生脉冲信号,并将事件产生。
接着,将LogicSRLatch模块设定为1,机器人的表面传感器将保持检测工作。
接着,Sours将产生重复的功能,并进行入队工作,将重复的产品加入队列组件。
当复制品从队伍中传送或与表面传感器联系后,表面感应器会收到图像信息。
此时,它开始传输信息并停止把产品加入到队伍中,同时进行出队动作和信息传送动作。
信息传送动作是传输检测信息。
3.3机器人I/O信号设置外设I/O信号设置后,与机器人信号再连接,内部配备有DSQC652通信板(数字量十六进十六出),总线地址为十。
点击示教器的主菜单-控制面板-配置-"DeviceNetDevice"功能,看到了I/O模块的配置。
该工作站配置有输送链末端纸箱检查、工位盘检查、更换盘产生的数据恢复、检测真空吸盘的机器人I/O这四种数据输入输出信息。
3.4工作站工作逻辑在机器人工作方面,还可能需要必须要先设定好刀具坐标系与刀具载荷,才可以实现与在工业机器人的输送链路上传递的仿真信息间的逻辑联系。
在实际使用时,首先需要通过默认的坐标系工具,然后沿Z轴线方向移动100mm,得到[0,0,100]坐标系的原点,重心[0,0,90],载荷重量则为100kg。
利用Loadldentify,可以自动测量刀具压力和工作重心。
当自动化机器人在完成工件吸附工作时,中心相对于tGrip沿Z轴线方向移动大约50mm,Loadldentify可用于计算有效载荷并获得空载数据。
优化和设置工业机器人的负载数据,才能确保连续、稳定、有效和高效的运行,延长使用寿命,为可进一步的简化机器人的编程,将pHome设置为机器人的安全等待位置,选择默认的wobj0作为工件坐标系,将传动链末端的产品位置坐标系设置为pPick,或将示教刀坐标系设置为tGrip,托盘定位为pBase。
对与示教点的意外路径,也必须通过程序执行加强监测通过使用偏移计算,就能够确定托盘方位的变化,同时假设该区域处在参考位,则机器人就将能够自行判断出奇数层托盘与偶数层托盘之间的正确的摆放的姿态。
当机器人与传送链产生的输入信号全部连接调试完毕后,可以确保产品调试完毕,传送链才可以成功将输出信号直接传输到机器人输入的信号diBoxInPos/diPalletlnPos,然后再执行自动运行的程序,直到托盘到达吸料位置。
在吸取前,先提前设置零点二秒真空,实现信号自动建立,然后再设定零点五秒延时吸取,最后再放置物品。
四、工作站虚拟仿真分析4.1工作站逻辑运行将在仿真选项卡条件下利用单个机器人工作站中的逻辑按钮,先进行自动完成机器人工作站与电路板之间的连接,接着再进行逻辑模拟。
在模拟流程中可以看到,当传送链传感器被检测并连接在周转箱上或托盘后,它就可以完成并把数据直接发送给数字输入传感器。