永磁同步电动机位置传感器零位偏差估计方法
- 格式:pdf
- 大小:254.73 KB
- 文档页数:4
![一种永磁同步电机转子位置传感器安装偏差估计方法[发明专利]](https://uimg.taocdn.com/52817bc55901020206409c2f.webp)
专利名称:一种永磁同步电机转子位置传感器安装偏差估计方法
专利类型:发明专利
发明人:杨云伟,黄永梅,陈兴龙,李锦英
申请号:CN201110369618.1
申请日:20111120
公开号:CN102401626A
公开日:
20120404
专利内容由知识产权出版社提供
摘要:一种永磁同步电机转子位置传感器安装偏差估计方法,步骤为:(1)利用外力旋转电机转子;(2)采样电机线线反电动势和转子位置传感器输出的位置值,得到n组数据(n表示多组);(3)将线线反电动势变换到两相静止坐标系;(4)用转子位置传感器输出的位置值,通过park变换将两相静止坐标系反电动势变换到旋转坐标系中,得到旋转坐标系直轴反电动势和交轴反电动势;(5)利用上一步得到的直轴和交轴反电动势比例,通过反正切运算得到n个角度值,求均值得到转子位置传感器安装偏差。
该方法可以精确地估计出隐极和凸极永磁同步电机转子位置传感器的安装偏差,得到很高的精度。
申请人:中国科学院光电技术研究所
地址:610209 四川省成都市双流350信箱
国籍:CN
代理机构:北京科迪生专利代理有限责任公司
代理人:成金玉
更多信息请下载全文后查看。
新能源装备永磁同步电机转子位置估计方法
刘心昊;刘昌盛;唐琦军;彭长锋
【期刊名称】《电力电子技术》
【年(卷),期】2024(58)2
【摘要】针对逆变器非线性和电机磁场空间谐波影响永磁同步电机转子位置估算精度的问题,提出一种基于新型自适应滤波器的内置式永磁同步电机(IPMSM)转子位置估计方法,建立无位置传感器电机矢量控制系统,对电机转子位置的估计误差进行分析。
基于该方法的特性,设计出一种由多个二阶广义积分器(SOGI)并联的新型自适应谐波滤波器,对反电动势中的高次谐波成分进行滤除,并搭建IPMSM驱动系统的台架展开测试验证。
研究结果表明,该方法可有效抑制转子位置估计反电动势中的谐波,其谐波脉动幅值减小至3°,提高电机转子位置精度和系统控制性能。
【总页数】5页(P34-38)
【作者】刘心昊;刘昌盛;唐琦军;彭长锋
【作者单位】山河智能装备股份有限公司;湖南农业大学
【正文语种】中文
【中图分类】TM341
【相关文献】
1.内置式永磁同步电机转子初始位置估计方法
2.内置式永磁同步电机转子初始位置估计方法
3.一种永磁同步电机转子位置传感器零位偏差估计方法
4.基于dSPACE
的永磁同步电机转子位置和速度估计方法5.基于SOGI-PLL的永磁同步电机转子位置估计方法
因版权原因,仅展示原文概要,查看原文内容请购买。
低分辨率位置传感器永磁同步电机精确位置估计方法综述哈尔滨工业大学电气工程及其自动化学院的研究人员倪启南、杨明、徐殿国、刘晓胜,在2017年第22期《电工技术学报》上撰文指出,伺服电机在装备制造、新能源和家电等领域有着广阔的应用,为得到高精度转子位置信息,通常采用旋转变压器或光电编码器等高分辨率位置码盘,但其价格普遍较高,增加了系统设计成本。
而无传感器技术当前还很难全面满足工业及家电等领域的应用要求。
低分辨率位置传感器永磁同步电机驱动技术是一种能够保证电机运行性能,同时能有效控制系统成本、提高系统可靠性的转子位置检测技术,受到国内外产业界的广泛关注。
介绍开关型霍尔位置传感器的使用方法与工作原理,总结原始霍尔位置信息误差的来源与校正方法;重点讨论基于插值法、同步坐标系滤波器法和观测器法的转子位置/转速估算策略,从提高低分辨率位置传感器电机系统低速性能等方面分析和比较不同估算策略的原理、优缺点、适用范围及应用情况;最后,总结现有研究成果及有待解决的问题。
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)凭借着运行可靠、效率高和体积小等优点逐渐成为交流调速和伺服领域的主流。
尤其在数字控制系统中,矢量控制和空间矢量脉宽调制方法的应用使得永磁同步电机能够实现高性能的速度和位置控制。
目前,PMSM在加工制造业、新能源汽车和家电等领域都有着广泛的应用。
在高性能PMSM控制系统中,为了调节转子速度和位置,一般需要在电机转子轴端安装位置传感器用于转速和位置闭环控制。
常用的高精度位置传感器有光电编码器和旋转变压器,但这些传感器在实际应用中会带来很多问题,比如硬件结构复杂、系统成本增加、接口和电缆增多导致系统可靠性降低、引入电磁干扰等。
为了解决这些问题,在过去的40年里国内外学者对交流电机的无位置/速度传感器控制进行了大量的研究[1-6]。
无位置传感器方法可以分为工作在阈值转速之上的位置估算方法和工作在零速及低速条件下的位置估算方法两类。
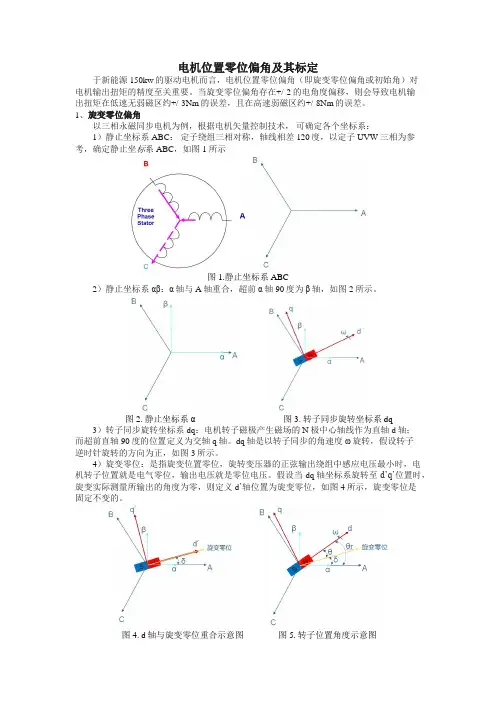
电机位置零位偏角及其标定于新能源150kw的驱动电机而言,电机位置零位偏角(即旋变零位偏角或初始角)对电机输出扭矩的精度至关重要。
当旋变零位偏角存在+/-2的电角度偏移,则会导致电机输出扭矩在低速无弱磁区约+/-3Nm的误差,且在高速弱磁区约+/-8Nm的误差。
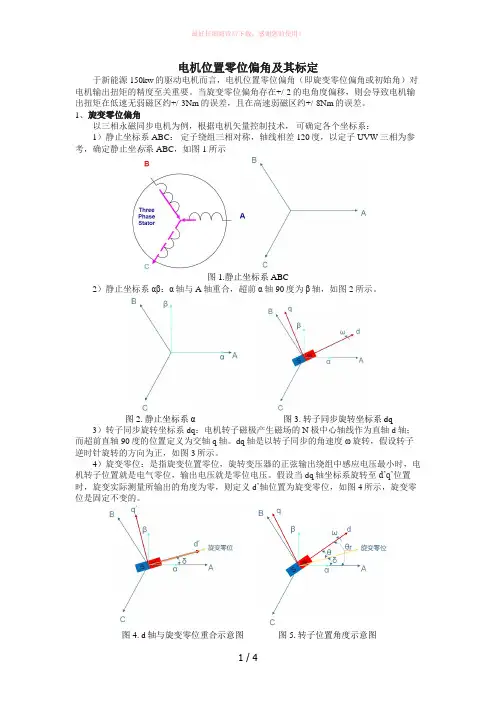
1、旋变零位偏角以三相永磁同步电机为例,根据电机矢量控制技术,可确定各个坐标系:1)静止坐标系ABC:定子绕组三相对称,轴线相差120度,以定子UVW三相为参考,确定静止坐标系ABC,如图1所示图1.静止坐标系ABC2)静止坐标系αβ:α轴与A轴重合,超前α轴90度为β轴,如图2所示。
图2. 静止坐标系α图3. 转子同步旋转坐标系dq 3)转子同步旋转坐标系dq:电机转子磁极产生磁场的N极中心轴线作为直轴d轴;而超前直轴90度的位置定义为交轴q轴。
dq轴是以转子同步的角速度ω旋转,假设转子逆时针旋转的方向为正,如图3所示。
4)旋变零位:是指旋变位置零位,旋转变压器的正弦输出绕组中感应电压最小时,电机转子位置就是电气零位,输出电压就是零位电压。
假设当dq轴坐标系旋转至d’q’位置时,旋变实际测量所输出的角度为零,则定义d’轴位置为旋变零位,如图4所示,旋变零位是固定不变的。
图4. d轴与旋变零位重合示意图图5. 转子位置角度示意图5)旋变实际测量输出的角度θ:图4中d轴与旋变零位重合,当转子继续逆时针旋转,则旋变零位与d轴会形成一个夹角θ,如图5所示,夹角θ就是旋变实际测量所输出的角度。
当转子旋转至d轴与零位重合时,则旋变实际测量所输出角度θ=0.如图4所示。
6)旋变零位偏角δ:为旋变零位与A轴的夹角,即电机所需标定的角度,如图4所示。
7)电机转子位置角度θr:为d轴与A轴的夹角,如图5所示,可知: θr=θ+δ。
2. 为什么每台电机都需做旋变零位偏角的标定根据永磁同步电机的矢量控制,为了电机输出的力矩最大化,定子绕组产生电磁场始终与转子永磁场正交,就需要准确得到转子位置角度θr,即准确得到θ和δ。
车用永磁同步电机零位偏差辨识方法及系统与制作流程引言:车用永磁同步电机是一种高效、高性能的电机,具有扭矩密度高、转速范围广等优点。
然而,由于各种因素的影响,如温度变化、永磁体参数变化等,导致电机转子在停机状态下的零位存在一定的偏差。
因此,对于车用永磁同步电机的零位偏差进行辨识具有重要意义。
本文将从车用永磁同步电机零位偏差的辨识方法与系统以及制作流程进行详细介绍。
一、车用永磁同步电机零位偏差辨识方法与系统1.准备工作:搭建实验平台,包括测量设备、控制设备以及同步电机。
2.运行同步电机:启动同步电机,使其转子开始旋转。
3.采集数据:通过传感器获取转子位置信号,并将数据传输到计算机上进行处理。
4.计算零位偏差:利用采集到的位置数据,计算转子在停机状态下的零位偏差。
5.分析结果:对计算得到的零位偏差进行分析,评估电机的性能。
1.传感器模块:用于采集转子位置信号,常用的传感器包括编码器和霍尔传感器。
2.数据采集模块:将传感器模块获取到的位置信号转换为数字信号,并进行存储和传输。
3.控制模块:用于控制同步电机的启动与停止,以及调整电机运行的方式和速度。
4.计算机处理模块:对采集到的数据进行处理和分析,并计算零位偏差。
二、车用永磁同步电机零位偏差辨识制作流程1.确定实验需求:根据车用永磁同步电机的实际应用需求,确定进行零位偏差辨识的目的和方法。
2.搭建实验平台:准备有关设备和材料,包括测量设备、控制设备、电机及相关元器件等。
3.进行传感器模块的安装:将传感器模块与电机适当位置连接,确保传感器能够准确采集转子位置信号。
4.进行数据采集模块的安装:将数据采集模块与传感器模块连接,确保数据传输的稳定性和可靠性。
5.进行控制模块的安装:将控制模块与电机连接,确保能够通过控制模块对电机进行启动与停止、调速等操作。
6.进行计算机处理模块的安装:将计算机处理模块与数据采集模块连接,确保能够实时获取采集到的数据进行处理和分析。
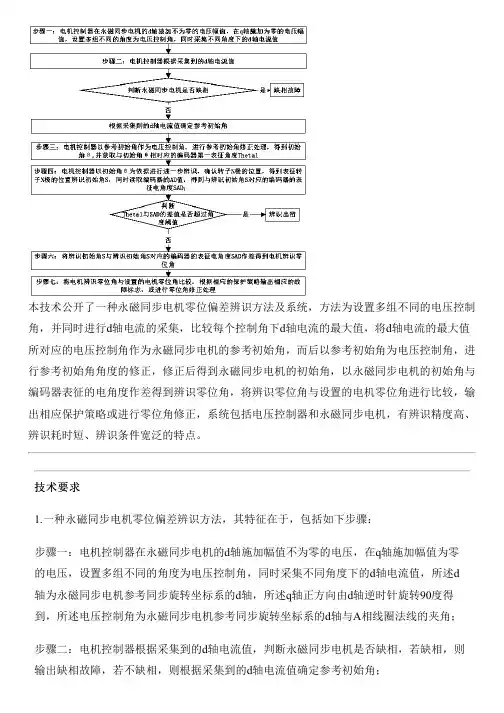
本技术公开了一种永磁同步电机零位偏差辨识方法及系统,方法为设置多组不同的电压控制角,并同时进行d轴电流的采集,比较每个控制角下d轴电流的最大值,将d轴电流的最大值所对应的电压控制角作为永磁同步电机的参考初始角,而后以参考初始角为电压控制角,进行参考初始角角度的修正,修正后得到永磁同步电机的初始角,以永磁同步电机的初始角与编码器表征的电角度作差得到辨识零位角,将辨识零位角与设置的电机零位角进行比较,输出相应保护策略或进行零位角修正,系统包括电压控制器和永磁同步电机,有辨识精度高、辨识耗时短、辨识条件宽泛的特点。
技术要求1.一种永磁同步电机零位偏差辨识方法,其特征在于,包括如下步骤:步骤一:电机控制器在永磁同步电机的d轴施加幅值不为零的电压,在q轴施加幅值为零的电压,设置多组不同的角度为电压控制角,同时采集不同角度下的d轴电流值,所述d轴为永磁同步电机参考同步旋转坐标系的d轴,所述q轴正方向由d轴逆时针旋转90度得到,所述电压控制角为永磁同步电机参考同步旋转坐标系的d轴与A相线圈法线的夹角;步骤二:电机控制器根据采集到的d轴电流值,判断永磁同步电机是否缺相,若缺相,则输出缺相故障,若不缺相,则根据采集到的d轴电流值确定参考初始角;步骤三:电机控制器以参考初始角作为电压控制角的参考,电压控制角根据采集到的d轴电流变化趋势在参考初始角的基础上进行微调,并进行参考初始角修正处理,得到初始角θ,同时获取与初始角θ相对应的编码器第一表征角度Theta1;步骤四:电机控制器以初始角θ为依据进行辨识,确认转子N极的位置,得到表征转子N 极的位置辨识初始角S,同时读取编码器的AD值,得到与辨识初始角S对应的编码器的表征电角度SAD;步骤五:判断编码器第一表征角度Theta1与辨识初始角S对应的编码器的表征电角度SAD 的差值是否超过角度阈值,若超过,则辨识出错,未超过,则转入步骤六;步骤六:将辨识初始角S与辨识初始角S对应的编码器的表征电角度SAD作差得到电机辨识零位角;步骤七:将电机辨识零位角与设置的电机零位角比较,根据相应的保护策略输出相应的故障标志,或进行零位角修正处理。

![永磁同步电机无位置传感器的转子位置误差估计方法[发明专利]](https://uimg.taocdn.com/4a2f2f8d561252d381eb6eab.webp)
专利名称:永磁同步电机无位置传感器的转子位置误差估计方法
专利类型:发明专利
发明人:浦蓉杰,高翔,林利,蔡良生,赵艳,吴佳祥
申请号:CN201711349302.X
申请日:20171215
公开号:CN107872178A
公开日:
20180403
专利内容由知识产权出版社提供
摘要:本发明涉及一种永磁同步电机无位置传感器的转子位置误差估计方法,包括以下步骤:(1)构造基于永磁同步电机的γδ轴坐标系的滑模观测器,并获取转子位置误差;(2)针对不同转速,测得永磁同步电机不同转速下对应的转子位置误差,制作转子位置误差关于转速的一维表格;(3)根据电机转速查表得到转子位置误差,并通过估计转子位置与转子位置误差求和获取转子位置,该转子位置参与该永磁同步电机的控制系统的运算。
通过该永磁同步电机无位置传感器的转子位置误差估计方法,能够显著提高传统永磁同步电机无位置传感器算法的转子位置估计的准确性。
申请人:上海中科深江电动车辆有限公司
地址:201821 上海市嘉定区叶城路1631号
国籍:CN
代理机构:上海智信专利代理有限公司
更多信息请下载全文后查看。
电机位置零位偏角及其标定于新能源150kw的驱动电机而言,电机位置零位偏角(即旋变零位偏角或初始角)对电机输出扭矩的精度至关重要。
当旋变零位偏角存在+/-2的电角度偏移,则会导致电机输出扭矩在低速无弱磁区约+/-3Nm的误差,且在高速弱磁区约+/-8Nm的误差。
1、旋变零位偏角以三相永磁同步电机为例,根据电机矢量控制技术,可确定各个坐标系:1)静止坐标系ABC:定子绕组三相对称,轴线相差120度,以定子UVW三相为参考,确定静止坐标系ABC,如图1所示图1.静止坐标系ABC2)静止坐标系αβ:α轴与A轴重合,超前α轴90度为β轴,如图2所示。
图2. 静止坐标系α图3. 转子同步旋转坐标系dq 3)转子同步旋转坐标系dq:电机转子磁极产生磁场的N极中心轴线作为直轴d轴;而超前直轴90度的位置定义为交轴q轴。
dq轴是以转子同步的角速度ω旋转,假设转子逆时针旋转的方向为正,如图3所示。
4)旋变零位:是指旋变位置零位,旋转变压器的正弦输出绕组中感应电压最小时,电机转子位置就是电气零位,输出电压就是零位电压。
假设当dq轴坐标系旋转至d’q’位置时,旋变实际测量所输出的角度为零,则定义d’轴位置为旋变零位,如图4所示,旋变零位是固定不变的。
图4. d轴与旋变零位重合示意图图5. 转子位置角度示意图5)旋变实际测量输出的角度θ:图4中d轴与旋变零位重合,当转子继续逆时针旋转,则旋变零位与d轴会形成一个夹角θ,如图5所示,夹角θ就是旋变实际测量所输出的角度。
当转子旋转至d轴与零位重合时,则旋变实际测量所输出角度θ=0.如图4所示。
6)旋变零位偏角δ:为旋变零位与A轴的夹角,即电机所需标定的角度,如图4所示。
7)电机转子位置角度θr:为d轴与A轴的夹角,如图5所示,可知: θr=θ+δ。
2. 为什么每台电机都需做旋变零位偏角的标定根据永磁同步电机的矢量控制,为了电机输出的力矩最大化,定子绕组产生电磁场始终与转子永磁场正交,就需要准确得到转子位置角度θr,即准确得到θ和δ。
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810832686.9(22)申请日 2018.07.26(71)申请人 联创汽车电子有限公司地址 201206 上海市浦东新区金吉路33弄4幢4楼(72)发明人 肖志锋 芦勇 罗来军 杜春洋 罗毅 王军 曹晨军 张善 (74)专利代理机构 上海浦一知识产权代理有限公司 31211代理人 焦天雷(51)Int.Cl.H02P 21/18(2016.01)H02P 21/14(2016.01)(54)发明名称永磁同步电机转子位置传感器零角度计算方法和标定方法(57)摘要本发明公开了一种永磁同步电机转子位置传感器零角度计算方法,包括定义永磁同步电机转子旋转一周有P个物理零角度、正转方向和反转方向;计算电机每个物理零角度位置转子正转和反转的电流矢量给定;通过电机加载正转和反转的电流矢量,获得每个物理零角度位置正转转子位置传感器零角度和反转转子位置传感器零角度;测定电机正反转负载,加权计算消除每个物理零角度位置的正转转子位置传感器零角度和反转转子位置传感器零角度误差,获得每个物理零角度转子位置传感器零角度。
本发明还公开了一种永磁同步电机转子位置传感器零角度标定方法。
本发明能避免负载带来的误差获得更准确的转子位置传感器零角度,以及更准确标定转子位置传感器零角度。
权利要求书2页 说明书9页 附图3页CN 109004875 A 2018.12.14C N 109004875A1.一种永磁同步电机转子位置传感器零角度计算方法,其特征在于,包括以下步骤:1)定义永磁同步电机转子旋转一周有P个物理零角度,每个物理零角度对应一个转子位置传感器零角度,P为自然数;定义永磁同步电机角度变化0°至360°为正转,电机角度变化360°至0°为反转,P是正整数;2)计算永磁同步电机每个物理零角度位置转子正转和反转的电流矢量给定;3)通过永磁同步电机加载步骤2)正转和反转的电流矢量,获得每个物理零角度位置正转转子位置传感器零角度和反转转子位置传感器零角度;4)测定永磁同步电机正反转负载,加权计算消除每个物理零角度位置的正转转子位置传感器零角度和反转转子位置传感器零角度误差,获得每个物理零角度转子位置传感器零角度。
一种永磁同步电机转子位置传感器零位偏差高精度测量方法张猛;郭超勇;梁骄雁;吕振华
【期刊名称】《微电机》
【年(卷),期】2016(049)001
【摘要】永磁同步电机的高性能控制离不开转子位置的高精度检测.转子位置的检测通常由与电机同轴安装的测角传感器实现.测角传感器零位与电机转子电气零位之间的偏差确定精度对电机的控制性能产生直接的影响.在分析电机反电势模型的基础上,结合旋转变压器解码数据,提出了一种通过拖动电机被动转动,测量电机绕组反电势及旋变解码数据高位信号的零位偏差直接测量方法.实验表明该方法具有测试方法简单、测量精度高等特点.
【总页数】4页(P40-43)
【作者】张猛;郭超勇;梁骄雁;吕振华
【作者单位】北京控制工程研究所,北京100190;北京控制工程研究所,北京100190;北京控制工程研究所,北京100190;北京控制工程研究所,北京100190【正文语种】中文
【中图分类】TM351;TM341
【相关文献】
1.基于相电流正负序分量相角差的高精度内置式永磁同步电机转子初始位置检测方法 [J], 刘景林;鲁家栋
2.一种永磁同步电机转子位置传感器零位偏差估计方法 [J], 杨云伟;黄永梅;陈兴龙
3.永磁同步电动机位置传感器零位偏差估计方法 [J], 胡任之;徐永向;王宝超;邹继斌
4.永磁同步电机转子角度偏差对驱动系统性能的影响 [J], 王庆超
5.助力转向永磁同步机旋转变压器零位偏差的检测方法 [J], 王延涛;刘雪慧;张玉玺因版权原因,仅展示原文概要,查看原文内容请购买。