不同PWM调制模式下无传感器无刷直流电机调速系统仿真
- 格式:pdf
- 大小:558.40 KB
- 文档页数:3

不同PWM调制模式下无传感器无刷直流电机调速系统仿真杨燕;牟超峰
【期刊名称】《微电机》
【年(卷),期】2008(41)4
【摘要】基于Matlab/Simulink构建了无位置传感器无刷直流电机双闭环调速系统的仿真模型.在模型中,通过建立PWM的Maflab函数,可方便实现不同PWM调制模式对调速系统的控制.仿真结果表明,模型动态响应快,极易对比观察出不同PWM调制模式下转速、相电流、转距波形的变化情况,有助于为实际电机调速系统选择最佳的PWM调制模式.
【总页数】3页(P86-88)
【作者】杨燕;牟超峰
【作者单位】桂林空军学院,桂林,541003;桂林空军学院,桂林,541003
【正文语种】中文
【中图分类】TM36+1
【相关文献】
1.无传感器无刷直流电机变频调速系统设计与实现 [J], 刘长征;叶瑰昀;陈德运;孙尧
2.不同PWM调制方式对无刷直流电机调速的影响 [J], 荣军;李一鸣;万军华;张敏;陈曦
3.不同PWM调制方式下无刷直流电机电磁转矩的计算 [J], 李自成;程善美;秦忆
4.空调压缩机用无刷直流电机无传感器调速系统设计 [J], 张鹏
5.人工心脏的无传感器无刷直流电机闭环调速系统 [J], 曾培
因版权原因,仅展示原文概要,查看原文内容请购买。
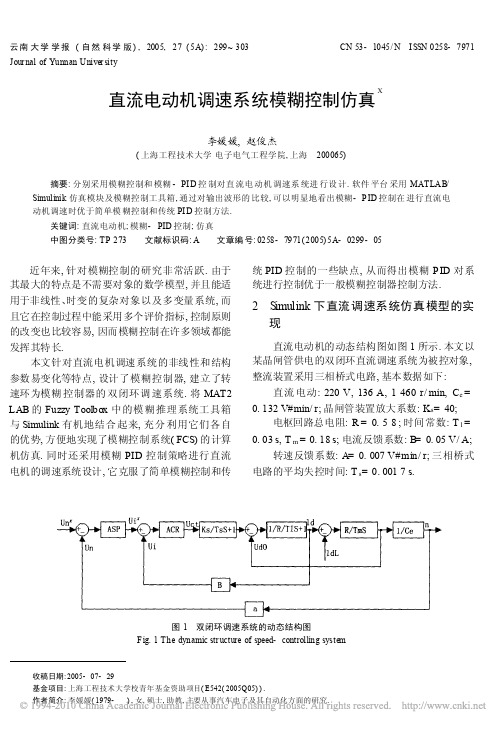
云南大学学报(自然科学版),2005,27(5A):299~303CN 53-1045/N I SSN 0258-7971Jour nal of Yunnan Univer sityX直流电动机调速系统模糊控制仿真李媛媛,赵俊杰(上海工程技术大学电子电气工程学院,上海 200065)摘要:分别采用模糊控制和模糊-PI D 控制对直流电动机调速系统进行设计.软件平台采用MATLAB/Simulinik 仿真模块及模糊控制工具箱,通过对输出波形的比较,可以明显地看出模糊-P ID 控制在进行直流电动机调速时优于简单模糊控制和传统PI D 控制方法.关键词:直流电动机;模糊-PID 控制;仿真中图分类号:TP 273 文献标识码:A 文章编号:0258-7971(2005)5A-0299-05近年来,针对模糊控制的研究非常活跃.由于其最大的特点是不需要对象的数学模型,并且能适用于非线性、时变的复杂对象以及多变量系统,而且它在控制过程中能采用多个评价指标,控制原则的改变也比较容易,因而模糊控制在许多领域都能发挥其特长.本文针对直流电机调速系统的非线性和结构参数易变化等特点,设计了模糊控制器,建立了转速环为模糊控制器的双闭环调速系统.将MAT 2LAB 的Fuzzy Toolbox 中的模糊推理系统工具箱与Simulink 有机地结合起来,充分利用它们各自的优势,方便地实现了模糊控制系统(FCS)的计算机仿真.同时还采用模糊PID 控制策略进行直流电机的调速系统设计,它克服了简单模糊控制和传统PID 控制的一些缺点,从而得出模糊PID 对系统进行控制优于一般模糊控制器控制方法.2 S imulink 下直流调速系统仿真模型的实现直流电动机的动态结构图如图1所示.本文以某晶闸管供电的双闭环直流调速系统为被控对象,整流装置采用三相桥式电路,基本数据如下:直流电动:220V,136A,1460r/min,C e =0.132V #min/r;晶闸管装置放大系数:K s =40;电枢回路总电阻:R =0.58;时间常数:T l =0.03s,T m =0.18s;电流反馈系数:B =0.05V/A;转速反馈系数:A =0.007V #min/r;三相桥式电路的平均失控时间:T s =0.0017s.图1 双闭环调速系统的动态结构图F ig.1The dynamic str ucture of speed-controlling system收稿日期:2005-07-29基金项目:上海工程技术大学校青年基金资助项目(E542(2005Q05)).作者简介:李媛媛(1979- ),女,硕士,助教,主要从事汽车电子及其自动化方面的研究.电流环为典型I 型系统,选用PI 型,转速环为典型Ò型系统,也选用PI 调节器.在此按传统的工程设计方法设计出双闭环系统的电流环和转速环,得K i =1.013,S i =0.03s,K n =11.7,S n =0.087s,将其转化为PI 调节器参数,即为ACR 的K p =11013,K I =33.7,ASR 的K p =11.7,K I =134.5.因此,ACR 和ASR 可由Simulink 中的PID 模块来实现.按照工程设计方法所得到的值输入PID 调节器,我们可以得到如图2的波形.图2 工程设计法输出波形Fig.2The outputs for m engineering design method由此仿真结果反映出用工程设计方法得到的输出波形在快速响应方面做的较好,能很快地达到稳态值,稳态误差也几乎没有.只是从图中可看出超调较大,达到了200r/min 以上,从而可知工程设计法PI 控制的效果并不是十分优越.2 直流电动机的模糊控制2.1 模糊控制器的设计 根据经典的直流电动机双闭环调速系统的结构,考虑到外环转速环是决定控制系统的根本因素,而内环电流环主要起改变电机的运行特性以利于外环控制的作用,故现将转速环用模糊控制器来代替,内环仍采用传统的PI 调节器.转速环采用简单的二维模糊控制器,其基本结构如图3所示.输入量为直流电机给定电压与反馈电压的偏差E 以及偏差的变化率E c ,用E 的导数来表示.输出取为控制量U .(1)模糊集合的编辑和运算 在MATLAB 命令窗口键入fuzzy 来运行模糊推理工具箱,系统就弹出一个模糊逻辑编辑器,在FILE 菜单下选择是采用Mamdani 型还是Sugeon 型模糊控制器.在EDIT 下添加输入和输出,分别为偏差E 和偏差变化率E c 以及控制量U .在输入和输出图标上双击,可以对输入和输出的隶属函数进行编辑,如论域范围、隶属函数条数、隶属函数形状等.图3 模糊控制系统方框图F ig.3The fuzzy control system(2)模糊规则编辑 进行模糊逻辑推理首先要编辑逻辑控制规则.在逻辑编辑器的view 中ed 2it rule 选项可实现此功能.本设计选用专家经验法,用/if ,,then ,,0形式表达模糊控制规则:If(E is NB)and(E c is NB)then(U is NB)[1]If(E is NB)and(E c is NS)then(U is NM)[1],,以上模糊控制规则共计35条,这些规则如表1.(3)模糊决策采用 与(And)方法为min,或(Or)方法为max,推理(Implication)方法为max,合成(Aggregition)方法为max,解模糊化(Defuzzifica 2tion)方法为重心法(centroid).300云南大学学报(自然科学版) 第27卷表1 直流电机模糊控制规则Tab.1The fuzzy contr ol rules of DC motor E c ENB NM NS O PS PM PB NB NB NB NB NB NM O O NS NM NM NM NM O PS PS O NM NM NS O PS PM P M P S NS NS O PM PM PM P M PBOOPMP BPBPBPB(4)生成模糊控制器 做好上述工作后,就会生成一个后缀为.FIS 的文件,然后用readfis 命令来读入模糊控制器.可运行如下命令:b=readfis(.b.fis .);本设计选用Mamdani 型模糊控制器.输入变量E 的论域取为[-1010],词集为{NB NM NS O PS PB PM},E c 的论域取为[01],词集为{NB NS O PS PB},U 的论域取为[010],词集为{NB NM NS O PS PM PB}.语言值的隶属函数选用三角形隶属函数.2.2 建立模糊控制仿真模型 通过调节比例因子K e ,K e c 和K u 我们可以得到较好的输出波形.增大K u 可明显地增加输出响应的快速性,而K e ,K ec 的作用又相当于PID 调节器中的K p 和K D .本设计中取K e =20,K e c =0.001,K u =2.输入给定电压U *n =10.26V ,输出波形如图5所示.由图5可看出输出波形较完美.能达到快速响应,0.6s 左右即能进入稳态,超调很小,只有5r/min,进入稳态之后几乎没有波动.和之前转速环的PI 控制相比,模糊控制的动态性能要优于原系统,尤其在控制超调方面.3 模糊-PID 控制由图6可以明显地看出模糊控制在控制超调方面要优于PID 控制,但从输出波形图反映PID 控制在系统响应的快速性上也是极好的.基于这些考虑针对直流电动机采用FUZZY -PID 控制策略.系统结构图如图7所示.图4 双闭环调速系统模糊控制的仿真模型Fig.4T he simulative model for fuzzy control of speed-controllingsystem图5 模糊控制输出波形Fig.5The outputs form of fuzzy contr ol图6 传统直流电动机P I 控制与模糊控制的比较F ig.6Compar e P I control of DC motor with fuzzy control301第5A 期 李媛媛,等:直流电动机调速系统模糊控制仿真图7FUZZY-PID控制直流电动机仿真结构图F ig.7The simulative structure for FUZZY-PID control of DC motor系统同样使用之前的双闭环调速,内环电流环仍为PI调节,而转速环改为了FUZZY-PID共同作用,其中用了1个开关来控制.当电动机起动时,偏差e大于某一阀值时,采用PID控制,提高系统的响应速度,而当偏差减小到设定阀值以下时,系统切换,改为模糊控制,从而减小超调.在仿真中,转速环节的切换阀值的设定是关键.系统由PID模态向FUZZY模态切换的阀值要选得恰当.如果选得太大就会过早进入系统的FUZZY模态而影响系统的响应速度,但有利于减少超调.反之,如果选得太小,系统有可能出现振荡,甚至由于PID控制器的效果达不到阀值而无法转为模糊模态控制.实际仿真中,我们可以根据MAT LAB仿真的效果,不断地调整阀值的大小,得到合理的参数值.本试验最后调整的阀值定为0.5V.图8为FUZZY-PID控制直流电动机输出波形,由图9局部放大图可看出,系统在0.2s处即进入了稳态,超调几乎没有,反映了模糊PID控制是优于传统直流电机PI控制和一般模糊控制的更有优势的控制系统.图8FUZZY-P ID控制输出波形Fig.8T he outputs form for FUZZY-PID control图9FUZZY-P ID控制输出波形(局部放大)Fig.9The outputs for m for F UZZY-PI D control(enlarge part)5结束语本文虽然只是初步设计并使用模糊控制器对系统进行控制,但通过比较已明显表明,使用模糊方法来进行控制的系统,与使用传统的PID方法进行控制的系统相比,模糊控制要优于PID控制所取得的效果.此外,模糊PID控制器的设计比较简单,容易实现,控制效果也更出色.经过一定的发302云南大学学报(自然科学版)第27卷展,将模糊控制或模糊推理的思想,与其他相对成熟的控制理论或方法结合起来,发挥各自的长处,所获得的控制效果将更理想.参考文献:[1] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,1992.[2] 张 晶,曾宪云.基于MATLAB/Simulink 直流电机调速系统模糊控制的建模与仿真[OL].中国工控网,2002.[3] 贾东耀,曾智刚.基于模糊控制的直流电机调速系统MATLAB 仿真[J].电机电器技术,2002,(5):2) 5.[4] 张 森,张正亮.MATLAB 仿真技术与实例应用教程[M].北京:机械工业出版社,2004.[5] 陈怀琛.MATLAB 及其在理工课程中的应用指南[M].西安:西安电子科技大学出版社,2004.Simulation for fuzzy control system of DC motorLI Yuan 2yuan,Z HAO Jun 2jie(Shanghai University of Engineering Science,Shanghai 200065,China)Abstr act :It is introduced that using Fuzzy control and Fuzzy 2PID control to design the DC Motor Speed 2Controlling System,and by using Simulink and Fuzzy control toolbox in MATLAB.And through comparing the output waveforms,the result educes that Fuzzy 2PID control overcomes some defects of simply fuzzy control and traditional PI control.Key works :DC Motor;Fuzzy-PID control;simulation*********************************(上接第298页)参考文献:[1] Digital Display Working Group.DVI Specification R evision 110[Z].1999.[2] Texas I nstr uments.TI P anelBusTM,TF P101A Datasheet[Z].2000.[3] Texas I nstr uments.TI P anelBusTM User .s Guide[Z].2000.[4] George Diniz,Tim Stroud.Br inging the Displays into the Digital F uture[M].EDN,2001.[5] Design-in of RF circuits[M].WHITE PAP ER,Nordic VLSI ASA 12,2002.[6] Display Data Channel (DDC)Specification Version 3[Z].Video Electronics Stands Association,15,1997.Applying the Chip TFP101A to DVI 110LI Li 2jie 1,YOU Yang 2ming 1,LIU Jin 2ling2(11Physics and Electronics Information,Cangzho u Teachers .College,Cangzhou 061001,China;21Department of Computer ,Cangzhou Teachers .College,Cangzhou 061001,China)Abstr act :The market demand has brought the displays into the digital timing.Basic knowledge of digi 2tal visual interface,DV I,was introduced simply first in this paper.It is analyzed that how to apply the DVI complicated receiver chip TFP101A to digital panel displays,and also the operation rules of the chip.Some valuable application notes on the chip and the related VESA standards were also introduced.Key words :DVI;Mix-signal layout;VESA standards;4@Over-Sampling303第5A 期 李媛媛,等:直流电动机调速系统模糊控制仿真。
摘要直流电机具有良好的启动性能和调速特性,它的特点是启动转矩大,能在宽广的范围内平滑、经济地调速,转速控制容易,调速后效率很高。
本文设计的直流电机调速系统,主要用proteus仿真,实现电机的加减速和正反转以及控制超调量和稳态误差等要求。
采用L298N芯片来设计电机驱动电路。
用LM331来实现电压频率转换。
在仿真中加上PI调节和三角波比较环节来进行直流PWM调速控制系统。
关键词:直流电机;调速控制系统;驱动电路。
目录摘要 (Ⅰ)目录 (Ⅱ)1前言 (1)2设计基本内容 (1)2.1设计题目 (1)2.2主要内容 (1)2.3具体要求 (1)3电路设计 (2)3.1设计基本框图 (2)3.2电机正反转模块 (2)3.3电机加减速模块 (3)3.4驱动电路模块 (3)3.5频电转换模块 (5)3.6PI调节及三角波比较模块 (7)4仿真结果 (7)5总结体会 (9)参考文献 (10)致谢 (11)仿真原理图 (12)1 前言电动机作为最主要的动力源和运动源之一,在生产和生活中占有十分重要的地位。
电动机的调速控制方法过去多用模拟法,随着单片机的产生和发展以及新型自关断元器件的不断涌现,电动机的控制也发生了深刻的变化。
直流电动机控制技术是一项以直流电动机作为机械本体,融入了电力电子技术、微电子技术、单片机控制技术和传感器技术的多学科交叉机电一体化技术。
单片机在电动机控制中的应用使调速系统具有了数值运算、逻辑判断及信息处理的功能。
自从全控型电力电子器件问世以后,就出现了采用全控型的开关功率元件进行脉宽调制的控制方式,形成了脉宽调制变换器-直流电动机调速系统,简称直流脉宽调速系统,或直流PWM调速系统。
PWM系统在很多方面有较大的优越性:主电路线路非常简单,需要用到的功率器件比较少;开关频率比较高,电机损耗及发热都比较少,电流很容易连续,并且谐波少;功率开关器件工作在开关状态,导通损耗比较小,装置效率比较高;低速性能比较好,调速范围比较宽,稳速精度比较高;若与快速响应的电动机配合,则系统频带宽,动态响应比较快,动态抗干扰能力强;直流电源采用不控整流时,电网功率因数比相控整流器高。

┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊摘要在电力拖动系统中,调节电压的直流调速是应用最广泛的一种调速方法,除了利用晶闸管整流器获得可调直流电压外,还可利用其它电力电子元件的可控性,采用脉宽调制技术,直接将恒定的直流电压调制成极性可变,大小可调的直流电压,用以实现直流电动机电枢两端电压的平滑调节,构成直流脉宽调速系统,随着电力电子器件的迅速发展,采用门极可关断晶体管GTO、全控电力晶体管GTR、P-MOSFET、绝缘栅晶体管IGBT等一些大功率全控型器件组成的晶体管脉冲调宽型开关放大器(Pulse Width Modulated),已逐步发展成熟,用途越来越广。
本文主要讨论了直流调速系统的基本概念,在此基础上系统地介绍了转速负反馈单闭环调速系统,转速电流负反馈双闭环调速系统的组成,工作原理,脉宽调速系统的原理和控制方法,介绍了直流脉宽调速系统的控制电路和系统构成。
最后应用MATLAB的Simulink,采用面向电气原理结构图的仿真技术,对直流脉宽调速系统进行了仿真分析。
关键词:调速,PWM控制,直流电动机,仿真┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录第一章引言1.1 直流调速系统简介 (5)1.2 PWM直流调速的研究背景和发展状况 (5)1.3 本设计的主要内容 (6)第二章直流电机调速系统2.1 直流电机调速系统的概述 (7)2.1.1 旋转变流机组直流电机调速系统 (7)2.1.2 静止式可控整流器调速系统 (7)2.1.3 直流斩波器或脉宽调速 (8)2.2 电机基本调速方法 (9)2.2.1 电枢串电阻调速 (9)2.2.2 弱磁调速 (9)2.2.3 调压调速 (10)2.3 转速控制的要求和调速指标 (10)2.4 闭环直流调速系统 (11)2.4.1单闭环直流调速系统 (11)2.4.2 转速电流双闭环调速系统 (14)2.4.2.1 双闭环系统的稳态结构图和静特性 (16)2.4.2.2 各变量的稳态工作点和稳态参数计算 (17)2.4.2.3 双闭环直流调速系统的启动过程分析 (18)2.4.2.4 转速和电流两个调节器的作用 (20)第三章PWM调制技术与PWM变换器3.1 PWM调制技术 (21)3.1.1 模拟式PWM控制 (21)3.1.2 数字式PWM控制 (22)3.2 PWM变换器 (23)3.2.1 简单的不可逆PWM变换器 (23)3.2.2 制动不可逆PWM变换器 (24)3.2.3 H型双极式PWM变换器 (26)第四章PWM直流电动机调速系统的设计4.1 PWM-M直流调速系统的控制电路 (28)4.2 系统设计方案的选择 (29)4.2.1主电路供电方案选择 (29)4.2.2主电路形式的选择 (30)4.2.3控制电路方案的选择 (32)4.3 直流脉宽调速系统的MATLAB仿真 (33)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊4.3.1 引言 (33)4.3.2双闭环控制的脉宽调速系统的仿真模型 (33)4.3.3 系统的仿真、仿真结果的输出及结果分析 (36)总结 (39)参考文献 (40)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第一章引言1.1 直流调速系统简介调速系统包括直流调速系统和交流调速系统两大类。

摘要本论文是基于直流调速系统的设计与仿真,通过对控制系统的硬件电路设计实现对控制系统的功能构成的进一步了解,并利用Matlab/Simulink工具箱进行系统的动态仿真从而分析转速和电流的仿真波形,并进行调试,使双闭环直流调速系统趋于完善、合理.采用工程设计方法对双闭环直流调速系统进行辅助设计,选择调节器结构,进行参数计算和近似校验.并建立起制动、抗电网电压扰动和抗负载扰动的Matlab/Simulink仿真模型.其中电路的设计包括转速显示电路、转速检测电路、电流检测电路、触发脉冲输出电路、过零检测电路以及保护电路。
通过仿真实现对系统的启动性能分析与抗扰性能分析,得出系统对负载的大幅度突变和电网电压的大幅波动具有良好的抗扰能力但是与理想的电动机的起动特性相比较,该系统的起动和恢复时间显得略长一些等结论关键词: 调节器双闭环直流调速系统 Matlab/Simulink仿真AbstractThis thesis is based on the DC speed control system design and simulation, through the control system hardware design to realize the control function of the system constitutes a further understanding Then the Matlab model of double closed - loop DC motor control system was built. The speed and current waveform were analyzed carefully. By trying a great deal of simulation the DC motor control system was made better and more reasonable.According to engineering design method a double closed- loop DC motor control system was designed, a modulator structure was selected and computed, and its parameter was corrected. And establish a Matlab / Simulinksimulation model which Includebraking, anti-disturbance and anti-grid voltage load disturbance Circuit design, including speed display circuit, speed detection circuit and current detection circuit, trigger pulse output circuit, zero crossing detection circuit and protection circuit.we conclude that this Significant mutation system load fluctuations and grid voltage has a good disturbance rejection capabilities by Simulationt System start-up performance analysis and performance analysisof disturbance rejection but also could find that the Ideal motor starting characteristics compared to the system start-up and recovery time seems even longer and so onKey words:Regulator; double closed- loop DC motor control system; Matlab/Simulink目录摘要1Abstract2目录3第一章概述51.1 研究背景51.2 直流双闭环系统介绍51.3 国内外研究现状与趋势61.4 本论文主要工作7第二章直流调速控制系统的原理72.1 系统的工作原理82.2 双闭环调速系统的构成82.2.1 转速、电流双闭环调速系统的组成92.2.2调节器输出限幅值的整定92.3 双闭环调速系统的动态特性102.3.1 双闭环调速系统突加给定时的启动过程102.3.2 双闭环调速系统的制动停车过程112.3.3 双闭环调速系统的抗扰性能112.3.4 两个调节器的作用11第三章系统的硬件设计133.1 直流调速系统的方案选择133.1.1 直流电动机的选择133.1.2 电动机供电方案的选择133.1.3 系统的结构选择143.2 系统硬件结构的总体设计143.3 系统主要芯片介绍153.4 系统硬件电路组成153.4.1 A T89C51单片机的性能及特点163.4.2 键盘/显示电路设计183.4.3 数字测速硬件电路设计193.4.4 电流检测电路设计203.4.5 触发脉冲输出电路设计213.4.6 过零检测电路设计233.4.7 整流电路中晶闸管保护设计25第四章控制电路的设计与计算284.1电流截止反馈环节的选择284.2调速静态精度的计算284.3给定环节的选择294.4控制电路的直流电源选择294.5继电器-接触器控制电路的设计30第五章双闭环直流调速系统的动态设计315.1电流调节器的设计315.2转速调节器的设计34第六章系统SIMULINK仿真分析376.1仿真参数的配置396.2 仿真步长与精度的关系416.3起动特性分析426.3.1 ASR的输出与电动机转速动态特性仿真结果与分析426.3.2 ACR的输出与电动机转速动态特性仿真结果与分析436.3.3 电动机电流与电动机转速动态特性仿真结果与分析436.4 抗扰性能分析446.5存在问题分析46结论48致谢错误!未定义书签。
直流电机调速资料汇总一.使用单片机来控制直流电机的变速.一般采用调节电枢电压的方式.通过单片机控制PWM1.PWM2,产生可变的脉冲.这样电机上的电压也为宽度可变的脉冲电压。
C语言代码:#include<AT89X52.h>#define uchar unsigned char#define uint unsigned intsbit K5=P1^4;sbit K6=P1^5;sbit PWM1=P1^0;sbit PWM2=P1^1;sbit FMQ=P3^6;uchar ZKB1,ZKB2;void delaynms(uint aa){uchar bb;while(aa--){for(bb=0;bb<115;bb++) //1ms基准延时程序{;}}}void delay500us(void){int j;for(j=0;j<57;j++){;}}void beep(void){uchar t;for(t=0;t<100;t++){delay500us();FMQ=!FMQ; //产生脉冲}FMQ=1; //关闭蜂鸣器delaynms(300);}void main(void){TR0=0; //关闭定时器0TMOD=0x01; //定时器0.工作方式1TH0=(65526-100)/256;TL0=(65526-100)%256; //100us即0.01ms中断一次 EA=1; //开总中断ET0=1; //开定时器0中断TR0=1; //启动定时器T0ZKB1=50; //占空比初值设定ZKB2=50; //占空比初值设定while(1){if(!K5){delaynms(15); //消抖if(!K5) //确定按键按下{beep();ZKB1++; //增加ZKB1ZKB2=100-ZKB1; //相应的ZKB2就减少}}if(!K6){delaynms(15); //消抖if(!K6) //确定按键按下{beep();ZKB1--; //减少ZKB1ZKB2=100-ZKB1; //相应的ZKB2增加}}if(ZKB1>99)ZKB1=1;if(ZKB1<1)ZKB1=99;}}void time0(void) interrupt 1{static uchar N=0;TH0=(65526-100)/256;TL0=(65526-100)%256;N++;if(N>100)N=0;if(N<=ZKB1)PWM1=0;elsePWM1=1;if(N<=ZKB2)PWM2=0;elsePWM2=1;}//显现:电机转速到最高后.也就是N为1或99时.再按一下.就变到99或1. //电机反方向旋转以最高速度二、内容及要求:1、设计一个直流电机调速系统.并用单片机实现连接开关和数码显示并将其值输入直流电机调速系统。
一、直流电机PWM 调速理论设计和仿真实验1、直流电机调速原理直流电动机根据励磁方式不同,分为自励和他励2种类型。
不同励磁方式的直流电动机,其机械特性曲线有所不同。
但是对于直流电动机的转速,总满足下式:r n e e R U T C C C =-内式中:U-电压,R-励磁绕组的内阻,Ce-电势常数,Cr-转矩常量由上式可知,直流电机的速度控制既可采用电枢控制法,也可采用磁场控制法。
磁场控制法控制磁通,其控制功率虽然较小,但低速时受到磁极饱和的限制,高速时受到换向火花和换向器结构强度的限制,而且由于励磁线圈电感较大,动态响应较差,所以在工业生产过程中常用的方法是电枢控制法。
电枢控制是在励磁电压不变的情况下,把控制电压信号加到电机的电枢上来控制电机的转速。
传统的改变电压方法是在电枢回路中串联一个电阻,通过调节电阻改变电枢电压,达到调速的日的,这种方法效率低平滑度差,由于串联电阻上要消耗电功率,因而经济效益低,而且转速越慢,能耗越大。
随着电力电子的发展,出现了许多新的电枢电压控制方法。
2 、PWM 技术简介在直流电机系统中,开关放大器提供驱动电机所需要的电压和电流,通过改变加在电动机上的电压的平均值来控制电机的运转。
在开关放大器中,常采用晶体管作为开关器件,晶体管如同开关一样,总是处在接通和断开的状态。
在晶体管处在接通时,其上的压降可以略去;当晶体管处在断开时,其上压降很大,但是电流为零,所以不论晶体管接通还是断开,输出晶体管中的功耗都是很小的。
一种比较简单的开关放大器是按照一个固定的频率去接通和断开放大器,并根据需要改变一个周期内“接通”和“断开”的相位宽窄,这样的放大器被称为脉冲调制放大器。
PWM(Pulse Width Modulation)脉冲宽度调制技术就是通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)的技术。
根据PWM 控制技术的特点,到目前为止主要有八类方法:相电压控制PWM 、线电压控制PWM 、电流控制PWM 、空间电压矢量控制PWM 、矢量控制PWM 、直接转矩控制PWM 、非线性控制PWM 、谐振软开关PWM 。
无位置传感器无刷直流电机控制系统仿真谭锦荣,曾岳南广东工业大学自动化学院,广东广州(510006)摘 要 介绍了无位置传感器无刷直流电机控制系统的控制策略,包括基于反电动势法的转子位置检测方法以及/三段式0起动方式,并在M atl ab7.1/S i m u link 平台上建立了控制系统虚拟原型,对该控制策略进行仿真分析,仿真结果证明了该策略的有效性。
关键词 无刷直流电机;无位置传感器;反电动势;起动;仿真中图分类号T M301.2 T M33 文献标识码A 文章编号100827281(2008)0620032205Si m ulation of C on trol Syste m for Sensor less Brush lessDC M otorTan J inrong and Z e ng Y ue nanAb strac t A strategy of contr ol syste m f or sensorl e ss brushless DC motor is i n tro 2duced i n th is paper ,wh ich incl u des detection me t h od of rotor positi o n based on back 2E MF and three 2stage start 2up method .Based onMa tlab7.1/Si m u li n k ,a virtualmode l of controlsyste m is set up.Th is contr ol strategy is eff ective verified by si m ulation resu l.tK ey wor ds Br ush less DC motor ;sensorless ;back 2E MF ;start 2up ;si m u lation .0 引言无刷直流电机具有体积小、重量轻和效率高的优点,因而近年来在办公自动化及家电行业中得到广泛应用。
微电机2008年第41卷第4期
中图分类号:T M36+
1 文献标识码:A 文章编号:100126848(2008)0420086203
不同P WM 调制模式下无传感器无刷
直流电机调速系统仿真
杨 燕,牟超峰
(桂林空军学院,桂林 541003)
摘 要:基于Matlab /Si m ulink 构建了无位置传感器无刷直流电机双闭环调速系统的仿真模型。
在模型中,通过建立P WM 的Matlab 函数,可方便实现不同P WM 调制模式对调速系统的控制。
仿真结果表明,模型动态响应快,极易对比观察出不同P WM 调制模式下转速、相电流、转距波形的变化情况,有助于为实际电机调速系统选择最佳的P WM 调制模式。
关键词:无位置传感器,无刷直流电机;仿真;脉宽调制
S i m ul a ti on of d i fferen t P WM m odes i n sen sorless and brushless
dc m otor con trol syste m ba sed on M a tl ab /si m uli n k
Y ANG Yan,MU Chao 2feng
(Guilin A ir 2force acade my Guangxi Guilin 541003,China )
Abstract:The model of double l oop syste m is established based on Matlab /Si m ulink 1W ith the use of MAT LAB Functi on,it is convenient for different pwm modes t o contr ol S LBLDC M in the model 1The si m ulati on results de monstrate its good dyna m ic characteristic,and s peed,current and t orque waves offer the hel p for choosing the best P WM mode of the actual mot or 1Key W ords:Sens orless;B rushless dc mot or;Si m ulink;P WM
收稿日期:2006207217
0 引 言
随着永磁无刷直流电机应用领域的不断拓宽,对电机控制系统的设计要求越来越高,既要考虑成本低廉、控制算法合理,又需兼顾控制性能好、开发周期短。
因此,如何建立有效的永磁无刷直流电机控制系统的仿真模型成为电机控制设计人员迫切需要解决的关键问题。
本文在分析无刷直流电机数学模型的基础上,借助于Matlab 强大的仿真建模能力,建立了BLDC M 控制系统的仿真模型。
在模型中,通过建立P WM 的Matlab 函数,可方便实现不同P WM 调制模式对调速系统的控制。
1 整体建模控制
在Matlab /Si m ulink 中建立独立的功能模块:如BLDC M 本体模块、P WM 控制模块、速度控制模块、参考电流模块、转矩计算模块等,对这些功能模块进行有机整合,可搭建出的仿真模型。
模型中,调速系统采用经典的转速、电流双闭环控制,电流环为内环,转速环为外环,均采用P I 调节。
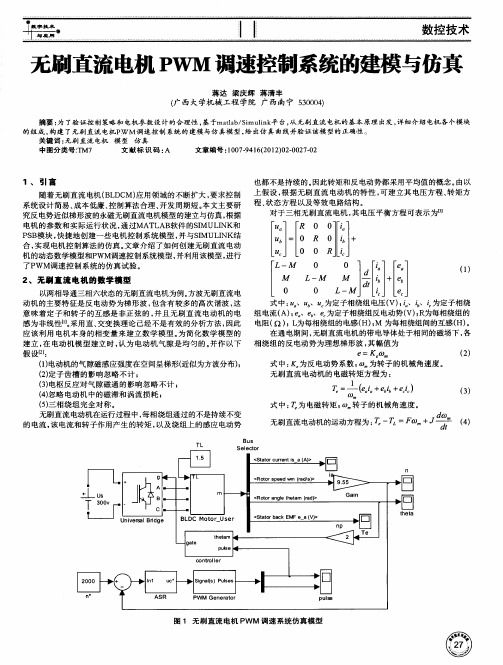
根据双闭环调速控制思想,调速系统仿真建模整体框图如图1所示。
调速系统的逆变电路采用三相全控电路,工作方式为二相导通星形三相六状态。
图1 BLDC M 调速系统仿真建模整体框图
111 BLDC M 本体模块
BLDC M 本体模块内部结构如图2如示。
相电
流、转速、转距和位置信号根据电枢绕组的电压平衡方程和动态方程解算得到。
其中反电动势为梯形波,采用分段线性法生成
[1]。
・
68・
不同P WM 调制模式下无传感器无刷直流电机调速系统仿真 杨 燕,
等
图2 BLDC M 本体模块结构
112 P WM 控制模块
为了实现系统宽范围调速,动态响应快,无位置传感器无刷直流电机通常采用定频调宽的P WM 调速方法。
对于采用星形三相六状态导通方
式的S LBLDC M 的控制系统,常用的P WM 调制模式有4种,即上功率管调制,下功率管恒通;上功率管恒通,下功率管调制;功率管前60°电角度恒通,后60°电角度调制;功率管前60°电角度调制,
后60°电角度恒通(P WM —ON )。
仿真模型为了方便实现4种不同P WM 调制模式的控制,通过Matlab 函数来实现。
P WM 模块实质上就相当于调速系统的逆变电路。
控制过程可用软件编程来实现。
P WM 控制模块如图3所示。
图3 P WM 控制模块
把电流环的比较值送到运算放大器的反向输入端,高频锯齿波作为载波信号送到同向输入端,将比较后的结果和三相反电势信号、位置信号作
为Matlab 函数(P WM )的输入信号,通过编写不同m 文件,得到不同P WM 调制模式下电机绕组端电
压信号(或相电压信号)。
因为Matlab 函数调用与
其同名的m 文件,所以,实现不同的P WM 调制模式只需使Matlab Functi on 模块的名称与相应的m 文件名同名即可。
2 仿真实例
本文基于Matlab /Si m ulink 建立了BLDC M 控制系统的仿真模型,并对该模型进行了双闭环控制系统的仿真。
仿真中,BLDC M 参数设置为:反电势系
数K e =010068V ・s/rad,定子相绕组电阻R =3Ω,定子相绕组自感L =010018H,互感M =01001H,转动惯量J =81245e -7kg ・m 2
,额定转速n e =10000r/m in,极对数n p =1,直流电压U s =36V,阻尼系数B =61274e -6,负载转矩T L =0102N ・m 。
通过编写不同调制模式下的P WM 函数,得到不同P WM 调制模式下相电流、转速和转矩对不同转速的
响应曲线如图4。
仿真结果表明,在4种P WM 调制模式下,对于给定参数下的BLDC M 调速系统采用HP WM -LON 调制模式时,电流波形最接近理想方波电机
的电流波形,转速响应快,转矩脉动小。
3 结 语
在Matlab /Si m ulink 平台上建立BLDC M 仿真模型,能清晰了解各器件、子系统、系统之间的信息交换,掌握各部分之间的交互影响。
本文在Si m ulink 中构造的BLDC M 调速系统模型动态响应
性能好,能快捷验证控制算法,改换控制方法也十分方便,为分析和设计BLDC M 调速系统提供了
・
78・
微电机2008年第41卷第4期
有效的手段和工具,也为实际电机调速系统的设计和调试提供了理论依据和参考。
图4 P WM 调制模式下电流、转速和转矩响应曲线
参考文献
[1] 纪志成,沈艳霞,姜建国1基于Matlab 无刷直流电机系统仿
真建模的新方法[J ]1系统仿真学报,2003,15(12)1
[2] 张琛1直流无刷电动机原理及应用[M ]1北京:机械工业出
版社,19961
[3] 李钟明,刘卫国1稀土永磁电机[M ]1北京:国防工业出版
社,19991
作者简介:杨 燕(1975-),女,硕士,讲师,研究方向为无刷直流电机控制。
・
88・。