最新中考考点_简单机械知识点汇总(全)(word)1
- 格式:doc
- 大小:857.00 KB
- 文档页数:19

初中物理第十二章简单机械知识点大全第十二章是初中物理中的一个重要章节,介绍了简单机械的基本原理和应用。
以下是关于简单机械的一些重要知识点:1.简单机械的概念:简单机械是由几个零件构成的机械装置,它们能够改变力的方向、大小或作用点的位置。
2.机械优势的概念:机械优势是指在简单机械中,输入的力与输出的力之间的比值。
机械优势大于1时,可以实现力的增大;机械优势小于1时,可以实现力的减小。
3.杠杆的原理和应用:杠杆是加固在支点上的一个刚体,可以改变力的方向和大小。
根据支点位置的不同,杠杆分为一类、二类和三类杠杆。
4.原理:一类杠杆的支点在力的中间,输入力和输出力在杠杆两侧,用于改变力的方向。
5.应用:剪刀、夹子等。
6.原理:二类杠杆的支点在杠杆的一端,输入力和输出力在支点的两侧,用于实现力的增大。
7.应用:蹬车、拨火棍等。
8.原理:三类杠杆的支点在杠杆的一端,输入力和输出力在支点的同一侧,用于实现力的减小。
9.应用:手臂、夹子等。
10.轮轴原理和应用:轮轴是由圆盘和固定在轮轴上的轴组成的。
通过旋转轮轴,可以改变力的方向。
11.绳索原理和应用:通过拉动绳子,可以改变力的方向和大小。
12.摩擦力的概念:摩擦力是物体之间由于接触面之间的相互作用力产生的阻碍运动的力。
13.静摩擦力和动摩擦力的区别:物体在静止时,摩擦力称为静摩擦力;物体在运动时,摩擦力称为动摩擦力。
静摩擦力的大小与物体间的接触面积、物体间的粗糙度和物体的压力有关。
14.塞5560与斯福韦茨定律的关系:斯福韦茨定律表明,静摩擦力的大小与接触面和物体压力的乘积成正比。
15.斜面的概念和原理:斜面是一个倾斜的平面,可以通过减小物体所受重力的大小来实现力的减小。
16.水平摩擦力的概念和计算:当物体在水平表面上滑动时,所受到的摩擦力与物体的垂直压力成正比。
摩擦力的大小可以通过涂抹润滑剂来减小,或者通过增加物体与表面间的粗糙度来增大。
17.斜面摩擦力的概念和计算:当物体在斜面上滑动时,斜面的摩擦力是由垂直于斜面的力和平行于斜面的力合成而成。
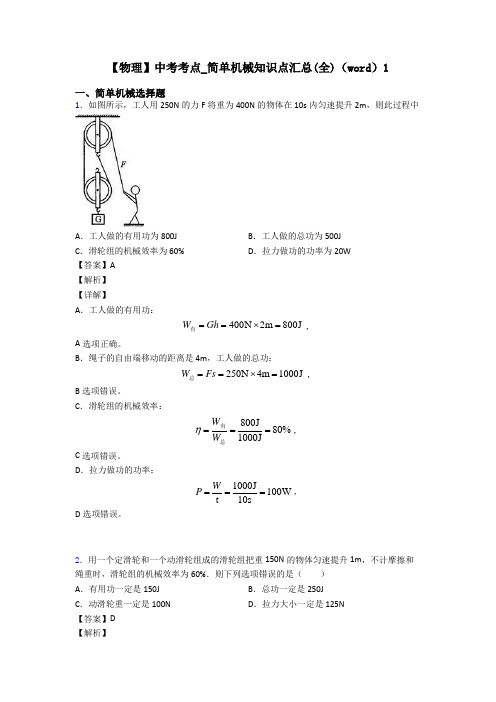
【物理】中考考点_简单机械知识点汇总(全)(word )1一、简单机械选择题1.如图所示,工人用250N 的力F 将重为400N 的物体在10s 内匀速提升2m ,则此过程中A .工人做的有用功为800JB .工人做的总功为500JC .滑轮组的机械效率为60%D .拉力做功的功率为20W【答案】A【解析】【详解】A .工人做的有用功: 400N 2m 800J Gh W ==⨯=有 ,A 选项正确。
B .绳子的自由端移动的距离是4m ,工人做的总功:250N 4m 1000J W Fs ==⨯=总 ,B 选项错误。
C .滑轮组的机械效率:800J 80%1000JW W ===有总η, C 选项错误。
D .拉力做功的功率: 1000J 100W t 10sW P ===, D 选项错误。
2.用一个定滑轮和一个动滑轮组成的滑轮组把重150N 的物体匀速提升1m ,不计摩擦和绳重时,滑轮组的机械效率为60%.则下列选项错误的是( )A .有用功一定是150JB .总功一定是250JC .动滑轮重一定是100ND .拉力大小一定是125N【答案】D【解析】【分析】知道物体重和物体上升的高度,利用W=Gh求对物体做的有用功;又知道滑轮组的机械效率,利用效率公式求总功,求出了有用功和总功可求额外功,不计绳重和摩擦,额外功W额=G轮h,据此求动滑轮重;不计摩擦和绳重,根据F=1n(G物+G轮)求拉力大小.【详解】对左图滑轮组,承担物重的绳子股数n=3,对物体做的有用功:W有=Gh=150N×1m=150J,由η=WW有总,得:W总=Wη有=15060%J=250J,因此,W额=W总-W有=250J-150J=100J;因为不计绳重和摩擦,W额=G轮h,所以动滑轮重:G轮=Wh额=1001Jm=100N,拉力F的大小:F=13(G物+G轮)=13(150N+100N)=2503N;对右图滑轮组,承担物重的绳子股数n=2,对物体做的有用功:W有=Gh=150N×1m=150J,由η=WW有总,得:W总=Wη有=15060%J=250J,所以W额=W总-W有=250J-150J=100J;因为不计绳重和摩擦,W额=G轮h,因此动滑轮重:G轮=Wh额=1001Jm=100N,拉力F的大小:F=12(G物+G轮)=12(150N+100N)=125N;由以上计算可知,对物体做的有用功都是150J,总功都是250J,动滑轮重都是100N,故A、B、C都正确;但拉力不同,故D错.故选D.3.如图所示,利用动滑轮提升一个重为G的物块,不计绳重和摩擦,其机械效率为60%.要使此动滑轮的机械效率达到90%,则需要提升重力为G的物块的个数为()A.3 个B.4 个C.5 个D.6 个【答案】D【解析】【详解】不计绳重和摩擦,,,要使,则.4.某商店有一不等臂天平(砝码准确),一顾客要买2kg白糖,营业员先在左盘放一包白糖右盘加1Kg砝码,待天平平衡后;接着又在右盘放一包白糖左盘加1kg砝码,待天平平衡后.然后把两包白糖交给顾客.则两包白糖的总质量A.等于2Kg B.小于2Kg C.大于2Kg D.无法知道【答案】C【解析】解答:由于天平的两臂不相等,故可设天平左臂长为a,右臂长为b(不妨设a>b),先称得的白糖的实际质量为m1,后称得的白糖的实际质量为m2由杠杆的平衡原理:bm1=a×1,am2=b×1,解得m1=,m2=则m1m2=因为(m1+m2)2=因为a≠b,所以(m1+m2)-2>0,即m1+m2>2这样可知称出的白糖质量大于2kg.故选C.点睛:此题要根据天平的有关知识来解答,即在此题中天平的臂长不等,这是此题的关键.5.用图中装置匀速提升重为100N的物体,手的拉力为60N,滑轮的机械效率为()A.16.7% B.20% C.83.3% D.100%【答案】C【解析】【详解】由图可知,提升重物时滑轮的位置跟被拉动的物体一起运动,则该滑轮为动滑轮;∴拉力移动的距离s=2h,η=====≈83.3%.6.用如图所示滑轮组提起重G=320N的物体,整个装置静止时,作用在绳自由端的拉力F=200N,则动滑轮自身重力是(绳重及摩擦不计)A.120NB.80NC.60ND.无法计算【答案】B【解析】【详解】由图可知,n=2,由题知,G物=320N,F=200N,∵不考虑绳重和摩擦,,即:,∴动滑轮重:G轮=80N.7.一均匀木板AB,B端固定在墙壁的转轴上,木板可在竖直面内转动,木板下垫有长方形木块C,恰好使木块水平放置,如图所示,现有水平力F由A向B缓慢匀速推动,在推动过程中,推力F将A.逐渐增大B.逐渐减小C.大小不变D.先增加后减小【答案】A【解析】【详解】以杆为研究对象,杆受重力G和C对它的支持力F支,重力的力臂为l G,支持力的力臂为l支,根据杠杆平衡条件可得:F支l支=Gl G,水平力F由A向B缓慢匀速推动木块,F支的力臂在减小,重力G及其力臂l G均不变,根据杠杆平衡条件可知,在整个过程中支持力在逐渐增大;由于支持力逐渐变大,且力的作用是相互的,所以可知杆对物体C的压力也逐渐变大,根据影响摩擦力大小的因素可知,C和木板间、C和地面间的摩擦力逐渐增大,木块C匀速运动,受到推力和摩擦力是平衡力,推力大小等于摩擦力大小,由力的平衡条件可知,水平推力F也逐渐增大,故A符合题意,BCD不符合题意。
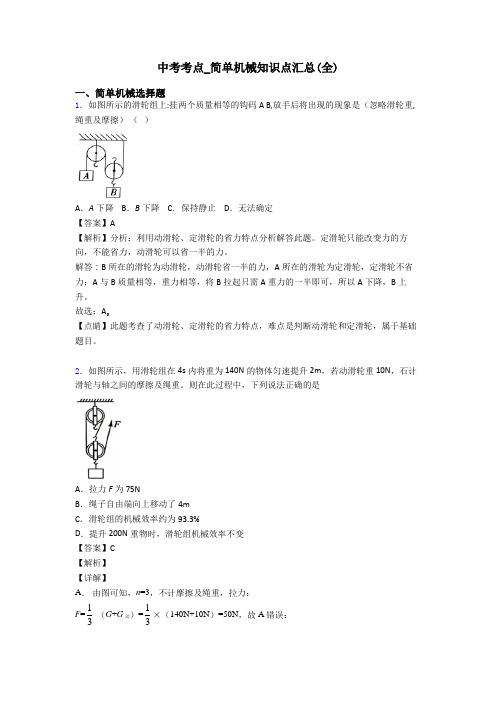
中考考点_简单机械知识点汇总(全)一、简单机械选择题1.如图所示的滑轮组上:挂两个质量相等的钩码A B,放手后将出现的现象是(忽略滑轮重,绳重及摩擦)()A.A下降 B.B下降 C.保持静止 D.无法确定【答案】A【解析】分析:利用动滑轮、定滑轮的省力特点分析解答此题。
定滑轮只能改变力的方向,不能省力,动滑轮可以省一半的力。
解答:B所在的滑轮为动滑轮,动滑轮省一半的力,A所在的滑轮为定滑轮,定滑轮不省力;A与B质量相等,重力相等,将B拉起只需A重力的一半即可,所以A下降,B上升。
故选:A。
【点睛】此题考查了动滑轮、定滑轮的省力特点,难点是判断动滑轮和定滑轮,属于基础题目。
2.如图所示,用滑轮组在4s内将重为140N的物体匀速提升2m,若动滑轮重10N,石计滑轮与轴之间的摩擦及绳重。
则在此过程中,下列说法正确的是A.拉力F为75NB.绳子自由端向上移动了4mC.滑轮组的机械效率约为93.3%D.提升200N重物时,滑轮组机械效率不变【答案】C【解析】【详解】A.由图可知,n=3,不计摩擦及绳重,拉力:F=13(G+G动)=13×(140N+10N)=50N,故A错误;B.则绳端移动的距离:s=3h=3×2m=6m,故B错误;C.拉力做功:W总=Fs=50N×6m=300J,有用功:W有用=Gh=140N×2m=280J,滑轮组的机械效率:η=WW有用总×100%=280J300J×100%≈93.3%,故C正确。
D.提升200N重物时,重物重力增加,据η=WW有用总=GhGh G h+动=GG G+动可知滑轮组机械效率变大,故D错误。
3.物体做匀速直线运动,拉力F=60N,不计滑轮间的摩擦和动滑轮的自重,则物体受到的摩擦力是A.60 N B.120 N C.20 N D.180 N【答案】D【解析】【分析】分析滑轮组的动滑轮绕绳子的段数,不计滑轮间的摩擦和动滑轮的自重,根据得到物体受到的摩擦力。

简单机械知识点总结一、引言机械是人类使用最早的工具之一,它可以帮助人们完成一些简单的物理工作。
本文将从简单机械的定义、类型、原理和应用等方面进行总结和介绍。
二、简单机械的定义简单机械是指那些由一个或几个零件组成的,能够将力和运动相互转换的装置。
它们通常没有电动或电子部件,是基于物理原理运作的。
三、简单机械的类型1. 杠杆:杠杆是由一个支点和两个力臂组成的简单机械装置。
常见的杠杆有一级杠杆、二级杠杆和三级杠杆,它们的原理都是通过力臂和力臂之间的比例关系来实现力的放大或方向的改变。
2. 轮轴:轮轴是由一个固定的轴和一个绕轴旋转的轮组成的简单机械装置。
轮轴的原理是通过轮的旋转来改变力的方向和大小。
3. 滑轮:滑轮是一个带有凹槽的圆盘,它可以转动并改变力的方向。
滑轮通常与绳索一起使用,通过绳索的拉扯来改变力的大小和方向。
4. 斜面:斜面是一个倾斜的平面,它可以减小或改变物体移动时所需的力。
斜面的原理是通过减小物体所受重力的分量来减小所需的力。
5. 楔子:楔子是一个尖锐的物体,它可以分割物体或将物体固定在一起。
楔子的原理是通过将力分散到较大的面积上来实现工作的。
6. 螺旋:螺旋是一个带有螺纹的物体,它可以将旋转运动转换为线性运动。
螺旋通常与螺母一起使用,通过旋转来实现线性运动。
四、简单机械的原理简单机械的原理是基于力的平衡和能量守恒原理。
通过合理设计和组合各种零部件,可以实现力的放大、方向的改变、运动的转换等功能。
五、简单机械的应用简单机械广泛应用于各个领域,例如:1. 日常生活中,剪刀、开瓶器、梯子等都是简单机械的应用。
2. 工业生产中,起重机、传送带、机械手等都是基于简单机械原理设计的。
3. 农业领域,农用车、农用机械等也都是简单机械的应用。
六、总结简单机械是人类最早使用的工具之一,它们可以帮助人们完成一些简单的物理工作。
本文从简单机械的定义、类型、原理和应用等方面进行了总结和介绍。
简单机械的原理是基于力的平衡和能量守恒原理,通过合理设计和组合零部件,可以实现力的放大、方向的改变、运动的转换等功能。

中考物理复习:简单机械知识点1:杠杆1、杠杆及其五要素:(1)杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。
※①杠杆可直可曲,形状任意。
②有些情况下,可将杠杆实际转一下,来帮助确定支点。
如:鱼杆、铁锹。
(2)杠杆五要素:①支点:杠杆绕着转动的点,用字母O 表示。
②动力:使杠杆转动的力,用字母F 1表示。
③阻力:阻碍杠杆转动的力,用字母F 2表示。
※动力、阻力都是杠杆的受力,所以作用点在杠杆上。
动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反。
④动力臂:从支点到动力作用线的距离.用字母l 1表示。
⑤阻力臂:从支点到阻力作用线的距离.用字母l 2表示。
2、杠杆的平衡条件:(1)杠杆平衡:杠杆静止不动或匀速转动都叫做杠杆平衡。
注意:我们在实验室所做的杠杆平衡条件的实验是在杠杆水平位置平衡进行的,但在实际生产和生活中,这样的平衡是不多的。
在许多情况下,杠杆是倾斜静止,这是因为杠杆受到平衡力作用。
所以说杠杆不论处于怎样的静止,都可以理解成平衡状态。
(2)杠杆平衡条件的表达式:动力×动力臂=阻力×阻力臂。
(3)公式的表达式为:F 1l 1=F 2l 2。
3、杠杆中最小力的问题及力臂的画法:求最小动力问题,可转化为找最长力臂问题。
找最长力臂,一般分两种情况:(1)在动力的作用点明确的情况下,支点到力的作用点的连线就是最长力臂;(2)在动力作用点未明确时,支点到最远的点的距离是最长力臂。
力臂的画法:(1)首先在杠杆的示意图上,确定支点O。
(2)画好动力作用线及阻力作用线,画的时候要用虚线将力的作用线适当延长。
(3)在从支点O 向力的作用线作垂线,在垂足处画出直角,从支点到垂足的距离就是力臂,用三角板的一条直角边与力的作用线重合,让另一条直角边通过交点,从支点向力的作用线画垂线,作出动力臂和阻力臂,在旁边标上字母,l 1和l 2分别表示动力臂和阻力臂。
※画杠杆示意图时应注意:(1)阻力作用点应画在杠杆上:有部分同学认为阻力由石头的重力产生,所以阻力作用点应画在石头重心上,这是错误的。

关于初三年级物理简单机械的知识点总结第1篇:关于初三年级物理简单机械的知识点总结⒈杠杆平衡条件:f1l1=f2l2。
力臂:从支点到力的作用线的垂直距离。
通过调节杠杆两端螺母使杠杆处于水平位置的目的:便于直接测定动力臂和阻力臂的长度。
定滑轮:相当于等臂杠杆,不能省力,但能改变用力的方向。
动滑轮:相当于动力臂是阻力臂2倍的杠杆,能省一半力,但不能改变用力方向。
⒉功:两个必要因素:①作用在物体上的力;②物体在力方向上通过距离。
w=fs功的单位:焦耳3.功率:物体在单位时间里所做的功。
表示物体做功的快慢的物理量,即功率大的物体做功快。
w=ptp的单位:瓦特;w的单位:焦耳;t的单位:秒未完,继续阅读 >第2篇:九年级物理知识点简单机械总结⒈杠杆平衡条件:f1l1=f2l2。
力臂:从支点到力的作用线的垂直距离。
通过调节杠杆两端螺母使杠杆处于水平位置的目的:便于直接测定动力臂和阻力臂的长度。
定滑轮:相当于等臂杠杆,不能省力,但能改变用力的方向。
动滑轮:相当于动力臂是阻力臂2倍的杠杆,能省一半力,但不能改变用力方向。
⒉功:两个必要因素:①作用在物体上的力;②物体在力方向上通过距离。
w=fs功的单位:焦耳3.功率:物体在单位时间里所做的功。
表示物体做功的快慢的物理量,即功率大的物体做功快。
w=ptp的单位:瓦特;w的单位:焦耳;t的单位:秒未完,继续阅读 >第3篇:中考物理简单机械知识点的总结1.杠杆:一根在力的作用下能绕着固定点转动的硬棒就叫杠杆。
2.什么是支点、动力、阻力、动力臂、阻力臂?(1)支点:杠杆绕着转动的点(o)(2)动力:使杠杆转动的力(f1)(3)阻力:阻碍杠杆转动的力(f2)(4)动力臂:从支点到动力的作用线的距离(l1)。
(5)阻力臂:从支点到阻力作用线的距离(l2)3.杠杆平衡的条件:动力动力臂=阻力阻力臂。
或写作:f1l1=f2l2或写成。
这个平衡条件也就是阿基米德发现的杠杆原理。
中考考点_简单机械知识点汇总(全)(word)一、简单机械选择题1.如图所示,一根木棒在水平动力(拉力)F的作用下以O点为轴,由竖直位置逆时针匀速转到水平位置的过程中,若动力臂为L,动力与动力臂的乘积为M,则A.F增大,L增大,M增大B.F增大,L减小,M减小C.F增大,L减小,M增大D.F减小,L增大,M增大【答案】C【解析】【分析】找某一瞬间:画出力臂,分析当转动时动力臂和阻力臂的变化情况,根据杠杆平衡条件求解.【详解】如图,l为动力臂,L为阻力臂,由杠杆的平衡条件得:F l=GL;以O点为轴,由竖直位置逆时针匀速转到水平位置的过程中,l不断变小,L逐渐增大,G不变;由于杠杆匀速转动,处于动态平衡;在公式 F l=GL 中,G不变,L增大,则GL、F l都增大;又知:l不断变小,而F l 不断增大,所以F逐渐增大,综上可知:动力F增大,动力臂l减小,动力臂和动力的乘积M=F l增大;故选C.【点睛】画力臂:①画力的作用线(用虚线正向或反方向延长);②从支点作力的作用线的垂线得垂足;③从支点到垂足的距离就是力臂.2.在生产和生活中经常使用各种机械,使用机械时A.功率越大,做功越快B.做功越多,机械效率越高C .做功越快,机械效率越高D .可以省力、省距离,也可以省功 【答案】A 【解析】 【分析】(1)功率是表示做功快慢的物理量,即功率越大,做功越快;(2)机械效率是表示有用功所占总功的百分比;即效率越高,有用功所占的比例就越大; (3)功率和效率是无必然联系的; (4)使用任何机械都不省功. 【详解】A .功率是表示做功快慢的物理量,故做功越快功率一定越大,故A 正确;B .机械效率是表示有用功所占总功的百分比,故做功多,而不知道是额外功还是有用功,所以无法判断机械效率,故B 错误;C .由于功率和效率没有直接关系,所以功越快,机械效率不一定越高,故C 错误;D .使用任何机械都不省功,故D 错误. 故选A .3.如图所示,小丽分别用甲、乙两滑轮把同一桶沙从一楼地面提到二楼地面,用甲滑轮所做的总功为W 1, 机械效率为η1;用乙滑轮所做的总功为W 2, 机械效率为η2, 若不计绳重与摩擦,则A .W 1 = W 2 η1 = η2B .W 1 = W 2 η1 < η2C .W 1 < W 2 η1 > η2D .W 1 > W 2 η1 < η2【答案】C 【解析】 【分析】由图可知甲是定滑轮,乙是动滑轮,利用乙滑轮做的额外功多,由“小明分别用甲、乙两滑轮把同一桶沙从一楼地面提到二楼地面”可知两种情况的有用功,再根据总功等于有用功加上额外功,可以比较出两种情况的总功大小.然后利用100%W W 有总η=⨯即可比较出二者机械效率的大小. 【详解】因为用甲、乙两滑轮把同一桶沙从一楼地面提到二楼地面,所以两种情况的有用功相同;根据W W η=有总可知:当有用功一定时,利用机械时做的额外功越少,则总功越少,机械效率越高.而乙滑轮是动滑轮,所以利用乙滑轮做的额外功多,则总功越多,机械效率越低.即1212W W ηη<,>. 【点睛】本题考查功的计算和机械效率的大小比较这一知识点,比较简单,主要是学生明确哪些是有用功,额外功,总功,然后才能正确比较出两种情况下机械效率的大小.4.如图所示,定滑轮重4N ,动滑轮重0.5N ,在拉力F 的作用下,1s 内将重为4N 的物体A 沿竖直方向匀速提高了10cm .如果不计绳重和摩擦.则以下计算结果正确的是A .绳子自由端移动速度为0.3m/sB .拉力F 的大小为4NC .拉力F 的功率为0.45WD .滑轮组的机械效率为75% 【答案】C 【解析】 【详解】由图知道,承担物重的绳子的有效股数是:n =2, A .绳端移动的距离是: s =2h =2×0.1m=0.2m , 绳子自由端移动的速度是:0.2m 0.2m/s 1ss v t === , 故A 错误;B .不计绳重和摩擦,则拉力()()11=4N 0.5N 2.25N 2F G G n =+⨯+=动, 故B 错误;C .拉力做的总功:W 总 =Fs =2.25N×0.2m=0.45J ,拉力F 的功率:0.45J0.45W 1s W P t ===总 , 故C 正确; D .拉力做的有用功W 有 =Gh =4N×0.1m=0.4J ,滑轮组的机械效率是:0.4J100%100%0.45JW W η=⨯=⨯有总≈88.9%, 故D 错误。
人教版2023初中物理八年级物理下册第十二章简单机械知识点总结(超全)单选题1、如图所示,正在使用的四种工具中,属于费力杠杆的是()A.瓶盖起子B.托盘天平C.羊角锤D.筷子答案:DA.瓶盖起子在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不符合题意;B.天平在使用过程中,动力臂等于阻力臂,是等臂杠杆,故B不符合题意;C.羊角锤在使用过程中,动力臂大于阻力臂,是省力杠杆,故C不符合题意;D.筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,故D符合题意。
故选D。
2、如图所示,不计滑轮重和绳子与滑轮之间的摩擦,用三种不同的方式分别拉同一物体在水平地面上做匀速直线运动,所用拉力分别为F1、F2、F3,它们的大小关系正确的是()A.F2<F1<F3B.F1<F2 <F3C.F2<F3<F1D.F3<F2<F1答案:A不计滑轮重和绳子与滑轮之间的摩擦,假设物块与地面的摩擦力为f,左滑轮为定滑轮,F1处于绳端,所以F1=f中滑轮为动滑轮,F2处于绳端,则F2=1 2 f右滑轮为动滑轮,滑轮、物体匀速运动,滑轮受到向左的力2f等于向右的拉力F3,即F3=2f所以F2<F1<F3,故A符合题意,BCD不符合题意。
故选A。
3、如图,用相同的滑轮组将重分别为G1和G2的物体匀速提升相同高度,所用的拉力分别是F1和F2,机械效率分别是η1和η2。
若G1>G2,不计绳重及摩擦,则()A .F 1>F 2,η1>η2B .F 1<F 2,η1<η2C .F 1<F 2,η1>η2D .F 1>F 2,η1<η2答案:A同一滑轮组绳的有效股数n 相同,动滑轮重相同,若不计绳重与摩擦的影响,由F =1n(G +G 动)可知,提升物体的重力越大,所用的拉力越大,由G 1>G 2可知,两次所用的拉力的关系为F 1>F 2, 滑轮组的机械效率为η=W 有W 总×100%=Gℎ(G +G 动)ℎ×100%=G G +G 动×100%=11+G 动G ×100% 提升物体的重力越大,滑轮组的机械效率越大,所以,两次滑轮组机械效率的关系为η1>η2,故BCD 不符合题意,A 符合题意。
简单机械一、杠杆1、杠杆:一根在力的作用下能绕着固定点转动的就叫杠杆。
杠杆可以是直的,也可以是弯的,甚至是任意形状的,只要在力的作用下能绕固定点转动,且是硬物体,都可称为杠杆。
2、什么是支点、动力、阻力、动力臂、阻力臂?(1)支点:杠杆绕着转动的点(o) (2)动力:使杠杆转动的力(F 1) (3)阻力:阻碍杠杆转动的力(F 2)(4)动力臂:从支点到动力作用线的距离(L 1)(5)阻力臂:从支点到阻力阻力作用线的距离(L 2)3、研究杠杆的平衡条件:①杠杆平衡是指:杠杆静止或匀速转动。
②实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。
这样做的目的是:可以方便的从杠杆上量出力臂。
③结论:杠杆的平衡条件(或杠杆原理)是:动力×动力臂=阻力×阻力臂。
或写作:F 1L 1=F 2L 2 。
这个平衡条件也就是阿基米德发现的杠杆原理。
4、三种杠杆:名称结 构特 征特 点应用举例省力杠杆动力臂大于阻力臂(L 1>L 2,F 1< F 2)省力、费距离撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车、花枝剪刀费力杠杆动力臂小于阻力臂(L 1<L 2,F 1> F 2)费力、省距离缝纫机踏板、起重臂、人的前臂、理发剪刀、钓鱼杆、镊子、船桨等臂杠杆动力臂等于阻力臂(L 1=L 2,F 1=F 2)不省力、不费力天平,定滑轮2112L L F F二、滑轮1、定滑轮:①定义:轴固定不动的滑轮。
②特点:使用定滑轮不能省力但是能改变力的方向。
③对理想的定滑轮(不计轮轴间摩擦):(1): F=G (2):S=h2、动滑轮:①定义:轴和重物一起移动的滑轮。
(可上下移动,也可左右移动)②特点:使用动滑轮能省一半的力,但不能改变动力的方向。
③理想的动滑轮(不计轴间摩擦和动滑轮重力)则:(1):F=21G 物 (2): S=2h只忽略摩擦,拉力:F=21(G 动+G 物)3、滑轮组:①定义:定滑轮、动滑轮组合成滑轮组。
中考物理简单机械考点总结一、考点1 杠杆1. 杠杆(1)杠杆的定义:在力的作用下能绕着固定点转动的硬棒就是杠杆。
(2)参照下图1所示,杠杆的五要素包括:①支点,杠杆绕着转动的固定点(O);②动力,使杠杆转动的力(F1);③阻力,阻碍杠杆转动的力(F2);④动力臂,从支点到动力作用线的距离(l1);⑤阻力臂,从支点到阻力作用线的距离(l2)。
图12. 杠杆的平衡条件(1)杠杆的平衡:当有两个力或几个力作用在杠杆上时,杠杆能保持静止或匀速转动,则我们说杠杆平衡。
(2)杠杆平衡的条件:动力×动力臂=阻力×阻力臂,即:F1l1=F2l2。
(3)杠杆平衡实验说明在探究杠杆的平衡条件实验中,调节杠杆两端的平衡螺母,使杠杆在不挂钩码时,保持水平并静止,目的是为了使杠杆的自重对杠杆平衡不产生影响,此时杠杆自重的力臂为0;给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆重新在水平位置平衡,目的是方便直接从杠杆上读出力臂的大小;实验中要多次试验的目的是获取多组实验数据归纳出物理规律。
3. 杠杆的分类(1)省力杠杆:动力臂大于阻力臂的杠杆,省力但费距离。
(2)费力杠杆:动力臂小于阻力臂的杠杆,费力但省距离。
(3)等臂杠杆:动力臂等于阻力臂的杠杆,既不省力也不费力。
二、考点2 滑轮1. 定滑轮(1)定滑轮实质是一个等臂杠杆,支点是转动轴,动力臂和阻力臂长度都等于滑轮的半径。
(2)定滑轮的特点是不能省力,但可以改变动力的方向。
2. 动滑轮(1)动滑轮实质是一个动力臂是阻力臂二倍的省力杠杆,支点是上端固定的那段绳子与动滑轮相切的点,动力臂是滑轮的直径,阻力臂上是滑轮的半径。
(2)动滑轮特点是能省一半的力,但不能改变动力的方向,且多费一倍的距离。
3. 滑轮组(1)滑轮组连接:两种方式,绳子可以先从定滑轮绕起,也可以先从动滑轮绕起。
(2)滑轮组作用:既可以省力又可以改变动力的方向,但是费距离。
(3)滑轮组省力情况:由实际连接在动滑轮上的绳子段数决定。