连杆机构的优化设计
- 格式:pdf
- 大小:107.44 KB
- 文档页数:2
契贝谢夫四连杆机构的优化设计与应用
契贝谢夫四连杆机构是一种常用的机构,其由四根连杆和一个滑块组成。
契贝谢夫四连杆机构的优化设计和应用可以涉及以下方面:
1. 运动学分析和优化设计:可以通过对契贝谢夫四连杆机构的运动学特性进行分析和优化设计,以提高机构的性能。
通过优化连杆的长度和角度,可以实现所需的运动轨迹和位移,并最小化驱动力和摩擦损失。
2. 动力学分析和优化设计:可以通过对契贝谢夫四连杆机构的动力学特性进行分析和优化设计,以实现所需的力学性能。
通过优化连杆的惯量和刚度,可以提高机构的响应速度和精度,并最大限度地减小振动和动态载荷。
3. 结构强度分析和优化设计:可以通过对契贝谢夫四连杆机构的结构强度进行分析和优化设计,以确保机构在工作过程中的安全和可靠性。
通过优化连杆的剖面和材料,可以提高机构的承载能力和抗疲劳性,以应对不同工况和环境的要求。
4. 仿真和测试分析:可以通过使用计算机辅助设计和仿真软件,对契贝谢夫四连杆机构进行仿真分析,并验证优化设计的有效性。
同时,可以进行实际测试和试验,以验证优化设计参数和模型的准确性和可行性。
契贝谢夫四连杆机构在工程上有广泛的应用,例如在机械工程中可以应用于机器人、汽车发动机、传输机器和减速器等领域。
在机械设计和制造过程中,优化设计和应用契贝谢夫四连杆机构可以提高机械系统的性能、效率和可靠性。
此外,契贝谢夫四连杆机构也可以应用于模拟和教学实验,用于解决实际问题和培养学生的设计和创新能力。
基于matlab的平面连杆机构优化设计
基于Matlab的平面连杆机构优化设计是指利用Matlab软件平台,对平面连杆机构进行优化设计的过程。
平面连杆机构是一种常见的机械传动机构,广泛应用于各种机械系统中,如机械手、凸轮机构等。
优化设计是指通过数学建模、计算和分析,寻求满足一定性能要求的最优设计方案。
在基于Matlab的平面连杆机构优化设计中,通常需要建立机构的数学模型,包括几何模型和运动学模型。
几何模型描述机构的几何形状和尺寸,而运动学模型则描述机构的位置、速度和加速度等运动参数。
然后,利用Matlab 进行数值计算和分析,以确定最优的设计参数。
具体来说,基于Matlab的平面连杆机构优化设计可以分为以下几个步骤:1.建立数学模型:根据实际问题,建立平面连杆机构的几何模型和运动学模
型,将实际问题转化为数学问题。
2.定义优化目标:根据设计要求,定义优化目标函数,如最小化某个性能参
数、最大程度满足某个约束条件等。
3.确定设计变量:选择影响优化目标的主要参数作为设计变量,如连杆长度、
角度等。
4.约束条件:根据实际应用需求和机构运动特性,定义约束条件,如角度范
围、位移范围等。
5.求解优化问题:利用Matlab的优化工具箱进行数值计算,求解优化问题,
得到最优设计方案。
6.结果分析和验证:对优化结果进行分析和验证,确保最优设计方案的有效
性和可行性。
总之,基于Matlab的平面连杆机构优化设计是一种通过数学建模和数值计算来寻求最优设计方案的方法。
它可以帮助设计师快速找到满足性能要求的设计方案,提高设计效率和产品质量。
%铰链四杆机构实现连杆轨迹的优化设计% (调用目标函数lgjg_gjyh_mb 和非线性约束函数lgjg_gjyh_ys)%设计变量:x(1)-机架;x(2)-曲柄;x(3)-连杆;x(4)-摇杆;x(5)-连杆附杆;% x(6)-机架倾斜角beta;x(7)-连杆与附杆夹角 gamma;x(8)-曲柄相初始角thetaO; %设计变量初值 x0=[50;7;55;25;25;-12;15;50]; %设计变量边界 lb=[10;8;10;10;10;-20;5;5]; ub=[60;30;60;40;30;30;15;60]; % % % %hd=pi/180;delta_ n=acos((xo pt(3)A2+xo pt(4) ^2-(x0 pt(1)-xo pt(2))A2)/(2*x op t(3)*xo pt(4))); fprintf (' 机构最小传动角 delta_min = %3.4f ° \n',delta_n/hd);%调用多维约束优化函数(lgjg_gjyh_ys)计算最优点x*的性能约束函数值 [g,ceq]=lgjg_gjyh_ys(xo pt); disp ' fprintf (' 最小传动角约束函数值 g1* = %3.4f \n',g(1))fprintf (' 曲柄长度 <=机架长度 g2* = %3.4f \n',g(2)) fprintf (' 曲柄长度 <=连杆长度 g3* = %3.4f \n',g(3))fprintf (' 曲柄长度 <=摇杆长度 g4* = %3.4f \n',g(4))fprintf (' 曲柄+机架 <=摇杆+连杆 g5* = %3.4f \n' ,g(5)) fprintf (' 曲柄+连杆 <=摇杆+机架 g6* = %3.4f \n ',g(6)) fprintf (' 曲柄+摇杆 <=连杆+机架 g7* = %3.4f \n' ,g(7)) fprintf (' 机架长度<=60 g8* = %3.4f \n',g(8)) fprintf (' 曲柄长度>=8 g9* = %3.4f \n',g(9))fprintf (' 曲柄长度<=30 g10* = %3.4f \n',g(10)) fprintf (' 连杆长度<=60 g11* = %3.4f \n',g(11)) fprintf (' 摇杆长度<=40 g12* = %3.4f \n',g(12)) fprintf ('附杆长度>=10g13* = %3.4f \n',g(13))fprintf (' 机架长度 d = %3.4f mm \n',xo pt(1)) fprintf (' 曲柄长度 a = %3.4f mm \n',xo pt(2)) fprintf (' 连杆长度 b = %3.4f mm \n',xo pt(3)) fprintf (' 摇杆长度 c = %3.4f mm \n',xo pt(4)) fprintf (' 连杆附杆长度 h = %3.4f mm \n',xo pt(5)) fprintf (' 机架倾斜角 beta = %3.4f ° \n :X op t(6))fprintf (' 连杆与附杆夹角 gamma = %3.4f ° \n ',xo pt(7fprintf (' 曲柄初始位置角theta0 = %3.4f ° \n ',xo pt(8)) fprintf ('M 点轨迹坐标偏差f* = %3.4f\n ',fo pt)I线性不等式约束(g(2)〜g(20))中设计变量的系数矩阵 a 省略,定义为空矩阵“[]”线性不等式约束(g(2)〜g(20)中的常数项列阵b 省略,定义为空矩阵“[]” 没有等式约束,参数 Aeq 和beq 定义为空矩阵“[]” 调用非线性优化函数[xop t,fo pt]=fmi ncon( @lgjg_gjyh_mb,x0,[],[],[],[],lb,ub,@lgjg_gjyh_ys); dis p铰链四杆机构实现连杆轨迹的优化设计最优解最优点的约束函数值附杆长度<=30 g14* = %3.4f \n',g(14)) fprintf ('fprintf (' 机架倾斜角>=-20 °g15* = %3.4f \n',g(15)) fprintf ('机架倾斜角<=30 °g16* = %3.4f \n',g(16)) fprintf ('连杆附杆夹角>=0 °g17* = %3.4f \n',g(17)) fprintf ('连杆附杆夹角<=15 °g18* = %3.4f \n',g(18)) fprintf (' 曲柄初始角>=0 °g19* = %3.4f \n',g(19)) fprintf ('曲柄初始角<=15 °g20* = %3.4f \n',g(20)) 计算结果:Op timizati on term in ated: magn itude of direct ional derivative in search direct ion less tha n 2*op ti on s.Tol Fun and maximum con stra int violati on is less tha n op ti on s.TolC on.Active in equalities (to with in op ti on s.TolC on = 1e-006): lower2 ********in eqli n ineqnon li n9铰链四杆机构实现连杆轨迹的优化设计最优解upperan 机架长度 d = 51.7446 mm曲柄长度 a = 8.0000 mm连杆长度 b = 53.6230 mm摇杆长度 c = 25.4846 mm连杆附杆长度h = 22.6784 mm机架倾斜角beta = 11.4185 °连杆与附杆夹角gamma = 14.9999 °曲柄初始位置角theta0 = 50.0664 °M点轨迹坐标偏差f* = 1.9718机构最小传动角delta_min = 53.8751最优点的约束函数值最小传动角约束函数值g1* = -482.3881曲柄长度<=机架长度g2* = -43.7446曲柄长度<=连杆长度g3* = -45.6230曲柄长度<=摇杆长度g4* = -17.4846曲柄+机架<=摇杆+连杆g5* = -19.3631曲柄+连杆<=摇杆+机架g6* = -15.6062曲柄+摇杆<=连杆+机架g7* = -71.8830机架长度<=60 g8* = -8.2554曲柄长度>=8 g9* = 0.0000曲柄长度<=30 g10* = -22.0000连杆长度<=60 g11* = -6.3770摇杆长度<=40 g12* = -14.5154附杆长度>=10 g13* = -12.6784附杆长度<=30 g14* = -7.3216机架倾斜角>=-20 °g15* = -31.4185机架倾斜角<=30 °g16* = -18.5815连杆附杆夹角>=0 °g17* = -14.9999%铰链四杆机构实现连杆轨迹的优化设计 --目标函数文件---lgjg_gjyh_mb.mfun ctio n f=lgjg_gjyh_mb(x) %曲柄输入角增量Dtheta=[0,22,44,66,88,129,221,314]; %连杆上M 点给定的坐标 Sx=[26,23,20,17,13,10,20,30]; Sy=[16,17,17,16,15,11,6,12]; %目标函数 hd=pi/180;theta=x(8)+Dtheta;%曲柄输入角=初始角+角增量ep silo n=ata n(x(2).*si n((theta-x(6))*hd)/(x(1)-x(2).*cos((theta-x(6))*hd)));etaz=x(1)A2+x (2) ^2+x (3)^2-x (4) ^2-2*x(1)*x(2).*cos((theta-x(6))*hd); etam=2*x(3)*sqrt(x(1)A2+x (2)^2-2*x(1)*x(2).*cos((theta-x(6))*hd));eta=etaz./etam;p hi=x(6)+x(7)+eta-e psil on;Mx=x(2).*cos(theta*hd)+x (5) .*cos( phi*hd);My=x(2).*s in (theta*hd)+x (5).*si n(p hi*hd); f=sqrt(sum((Mx-Sx).A2+(My-Sy).A2)/8);%铰链四杆机构实现连杆轨迹的优化设计 fun ctio n [g,ceq]=lgjg_gjyh_ys(x)连杆附杆夹角<=15 曲柄初始角>=0 ° 曲柄初始角<=15 °g18* = -0.0001 g19* = -50.0664 g20* = -9.9336%凑整解的计算xz=[52,8,54,25,23,11.5,15,50]; fz=lgjg_gjyh_mb(xz);gz=lgjg_gjyh_ys(xz); delta_z=acos((xz(3)A2+xz(4)A2-(xz(1)-xz(2))A2)/(2*xz (3) *xz (4))); dis pI anfprintf (' fprintf (' if gz<=0dis p 'else铰链四杆机构实现连杆轨迹的优化设计凑整解M 点轨迹坐标偏差机构最小传动角f* = %3.4f delta_z= %3.4f ° 未a***、\n',fz)\n ',delta_z/hd)&&&&&&&&凑整解在可行域内 &&&&&&&&'dis p 'end&&&&&&&& 凑整解在可行域外&&&&&&&&'********铰链四杆机构实现连杆轨迹的优化设计凑整解M 点轨迹坐标偏差f* = 1.9989机构最小传动角 delta_z = 53.5270 &&&&&&&& 凑整解在可行域内********&&&&&&&&%连杆上M 点实际x 坐标 %连杆上M 点实际y 坐标 % M 点坐标偏差均方根值--约束函数文件---lgjg_gjyh_ys.m%机构最小传动角(40度)约束g(1)=x (3)A2+x(4)A2-(x(1)-x(2))A2-2*x (3) *x(4)*cos(40* pi/180); %曲柄存在条件约束 g(2)=-x(1)+x(2); g(3)=-x(3)+x(2); g(4)=-x(4)+x(2);g(5)=x(1)+x(2)-x(3)-x(4); % 曲柄 + 机架<= 摇杆 +连杆 g(6)=-x(1)+x(2)+x(3)-x(4); % 曲柄 + 连杆 <= 摇杆 +机架 g(7)=-x(1)+x(2)-x(3)+x(4); %曲柄+ 摇杆 <=连杆 +机架%边界约束g(8)=x(1)-60;% 机 架 <=60g(9)=8-x(2);g(10)=x(2)-30;%8 <=曲柄<=30g(11)=x(3)-60;%连; 杆 <=60g(12)=x(4)-40;%摇; 杆 <=40g(13)=10-x(5);g(14)=x(5)-30; g(15)=-x(6)-20;g(16)=x(6)-30; g(17)=-x(7);g(18)=x(7)-15; g(19)=-x(8);g(20)=x(8)-60; ceq珂];% 10 <=连杆附杆 <=30 % -20度 <=机架倾斜角% 0度 <=连杆附杆夹角 % 0度 <=曲柄初始角曲柄长度 曲柄长度 曲柄长度 <=机架长度 <=连杆长度 <摇杆长度<=30 度 <=15 度 <=60 度。

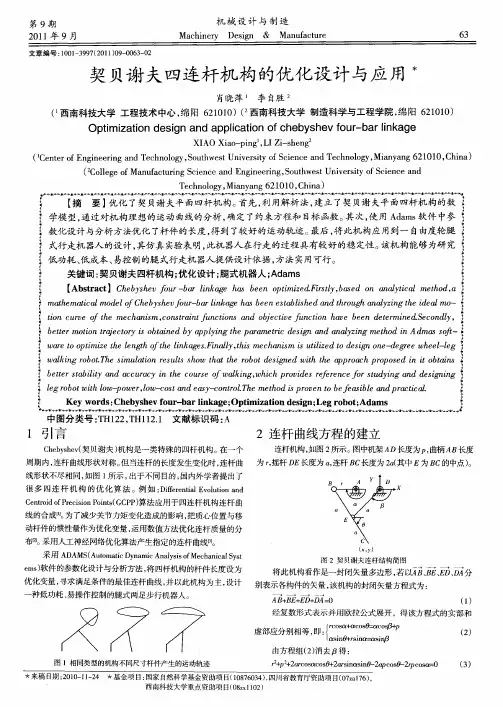
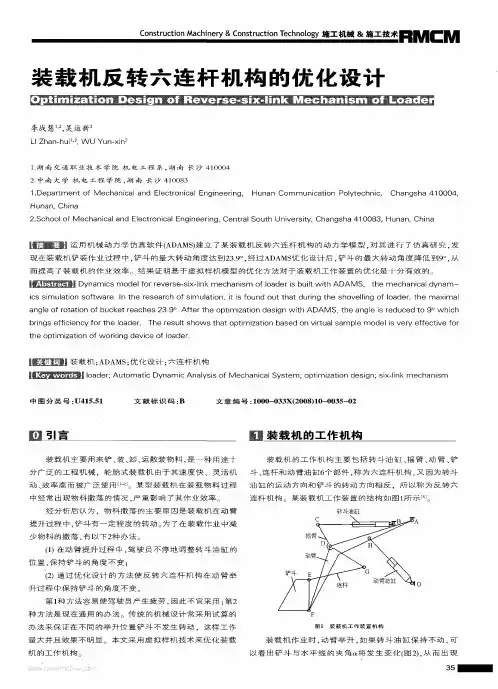
契贝谢夫四连杆机构的优化设计与应用肖晓萍;李自胜【摘要】优化了契贝谢夫平面四杆机构.首先,利用解析法,建立了契贝谢夫平面四杆机构的数学模型,通过对机构理想的运动曲线的分析,确定了约束方程和目标函数.其次,使用Adams软件中参数化设计与分析方法优化了杆件的长度,得到了较好的运动轨迹.最后,将此机构应用到一自由度轮腿式行走机器人的设计,其仿真实验表明,此机器人在行走的过程具有较好的稳定性.该机构能够为研究低功耗、低成本、易控制的腿式行走机器人提供设计依据,方法实用可行.%Chebyshev four-bar linkage has been optimizedFirstly,based on analytical method,a mathematical model of Chebyshev four-bar linkage has been established and through analyzing the ideal mo-tion curve of themechanism,constraint functions and objective function have been determinedSecondly, better motion trajectory is obtained by applying the parametric design and analyzing method in A dmas soft-ware to optimize the length of the linkages. Finally, this mechanism is utilized to design one-degree wheel-leg walking robot.The simulation results show that the robot designed with the approach proposed in it obtains better stability and accuracy in the course of walking,which provides reference for studying and designing leg robot with low-power,low-cost and easy-control.The method is proven to be feasible and practical.【期刊名称】《机械设计与制造》【年(卷),期】2011(000)009【总页数】3页(P63-65)【关键词】契贝谢夫四杆机构;优化设计;腿式机器人;Adams【作者】肖晓萍;李自胜【作者单位】西南科技大学工程技术中心,绵阳621010;西南科技大学制造科学与工程学院,绵阳621010【正文语种】中文【中图分类】TH122;TH112.11 引言Chebyshev(契贝谢夫)机构是一类特殊的四杆机构。
连杆机构的动力学分析与优化设计连杆机构是一种常见的机械传动装置,它由若干个连杆组成,通过铰链连接在一起。
连杆机构广泛应用于各个领域,如发动机、泵浦、机床等,对于实现复杂运动和力学传递起到重要的作用。
本文将对连杆机构的动力学分析与优化设计进行探讨。
一、连杆机构的动力学分析连杆机构的动力学分析是研究其运动规律和受力分布的过程。
在动力学分析中,我们可以通过构建连杆机构的运动学方程和受力方程来描述其运动和受力情况。
1. 运动学方程运动学方程描述了连杆机构中各个连杆的位置和速度之间的关系。
通过连杆机构的几何形状和运动特点,我们可以推导出各个连杆的位置和速度方程。
运动学方程的求解可以帮助我们了解连杆机构的运动规律和运动参数。
2. 受力方程受力方程描述了连杆机构中各个连杆受力的情况。
通过对各个铰链点的受力平衡条件的分析,我们可以得到连杆机构中各个连杆的受力方程。
受力方程的求解可以帮助我们了解连杆机构中各个连杆的力学特性,为优化设计提供基础。
二、连杆机构的优化设计连杆机构的优化设计旨在提高其性能和效率。
在连杆机构的优化设计中,我们可以从以下几个方面进行改进。
1. 结构优化连杆机构的结构优化包括选取合适的连杆尺寸和形状,以及确定连杆的连接方式。
通过对连杆机构结构的优化设计,可以减小其重量和体积,提高其刚度和强度,从而提高整个机构的性能。
2. 运动特性优化连杆机构的运动特性优化包括提高其运动平稳性和运动精度。
在优化设计过程中,可以通过调整连杆的长度比例和位置布局,以及选用合适的铰链点来改善连杆机构的运动特性。
运动特性优化可以使连杆机构实现更加精确和稳定的运动。
3. 动力优化连杆机构的动力优化包括提高其传动效率和降低能耗。
在优化设计过程中,可以选用合适的传动形式和传动参数,以及减小传动过程中的能量损失来改善连杆机构的动力性能。
动力优化可以提高连杆机构的整体效率,并减少对能源的消耗。
三、连杆机构的应用领域连杆机构广泛应用于各个领域,如发动机、泵浦、机床等。
连杆机构优化设计连杆机构是最常用的机构,因此连杆机构优化设计在机构设计中十分重要,研究工作开展得也最为广泛。
有大量的文献介绍有关平面四杆机构、平面五杆机构、柔性连杆机构、曲柄连杆机构、槽轮连杆机构、凸轮连杆组合机构和齿轮连杆等机构的优化。
鉴于四连杆机构的典型性,本节结合四连杆机构的函数再现优化设计问题,阐述连杆机构优化问题的一般方法及流程。
四连杆机构的优化设计就是对四连杆机构的参量进行优化调整,使得机构给定的运动和机构所实现的运动之间误差最小。
因此四连杆机构的优化设计的过程,就是寻找使得四连杆机构运动误差最小的一组机构设计参量。
四连杆机构设计参量确定后,就可认为实现了机构的优化设计。
四连杆机构的优化设计包括四连杆机构优化模型建立和优化模型求解二个主要过程。
通过对四连杆机构的分析确定优化方案,确定设计变量,给出目标函数,并将机构设计制约条件,如杆长条件、传动角条件等,写成相应的约束条件,即可建立机构优化设计模型。
下面介绍四连杆机构函数再现优化设计模型的建立。
连杆机构函数再现设计主要通过选取输人构件和输出构件相对应若干位置、采用机构图解法或分析法确定机构各参数。
图1是典型的平面铰链四杆机构,、、和分别表示于四个构件的长度,杆AB是输入构件。
假设图1所示的平面铰链四杆机构再现给定函数为,即,则机构位置取决于、、、铰链A的位置、AD与机架x轴夹角以及输人构件转角等七个变量。
图1 平面铰链四杆机构为简化问题,可令A的位置为,,构件的长度为1(参考构件),由此可将问题维数降为四维,并不影响构件输入、输出的函数关系。
由此可以得到输出构件转角外与输入构件转角之间的函数关系式:(1)机构优化设计目标就是使得输出构件转角与给定值在,所有位置上的误差最小。
因此机构优化设计的目标函数可用下式表示(2)当输入构件转角为时,输出构件转角外可由下式求得,(3)式中:所以(4)将上式代入式(3),并令代表设计变量、、及,机构优化设计目标函数可写为:(5)机构优化设计的约束条件应根据机构设计的实际情况确定。
连杆机构的结构优化设计及其应用连杆机构的结构优化设计及其应用连杆机构是一种常见的机械传动装置,由连杆和铰链组成。
它具有结构简单、传动效率高等优点,广泛应用于各种工程领域。
为了优化设计连杆机构及其应用,我们需要按照以下步骤进行思考。
第一步是明确设计目标。
在设计连杆机构之前,我们需要明确其应用场景和要达到的目标。
例如,如果我们要设计一个用于汽车发动机的连杆机构,我们的设计目标可能包括提高发动机的功率输出和减少能量损耗。
第二步是确定系统参数。
连杆机构的设计需要考虑一系列参数,如连杆长度、铰链位置和角度等。
这些参数会直接影响机构的运动性能和传动效率。
为了确定合适的参数,我们可以通过数值模拟和实验测试来分析不同参数组合下的机构性能,并选择最优参数。
第三步是进行机构优化。
在确定了系统参数后,我们可以使用优化算法来寻找最佳设计方案。
优化算法可以通过迭代计算,不断调整参数值,以达到最小化能量损耗或最大化功率输出等优化目标。
常用的优化算法包括遗传算法、粒子群算法等。
第四步是进行材料选择和结构设计。
连杆机构的性能不仅受参数的影响,还与材料的选择和结构的设计密切相关。
在选择材料时,我们需要考虑其强度、刚度和耐磨性等因素,以确保机构在高负荷下能够正常工作。
在结构设计方面,我们可以采用优化的拓扑结构和减少不必要的零件,以提高机构的重量和成本效益。
第五步是进行性能测试和验证。
设计连杆机构后,我们需要进行实际的性能测试和验证。
通过实验测试,我们可以评估机构的运动性能、传动效率和耐久性等指标,并与设计目标进行对比。
如果测试结果与设计目标相符,说明优化设计是成功的;如果测试结果不理想,则需要再次进行设计和优化。
最后,连杆机构的应用是多样化的。
除了汽车发动机,连杆机构还广泛应用于机械工程、航空航天、电力工程等领域。
例如,在机械工程中,连杆机构可用于实现旋转运动和直线运动的转换;在航空航天领域,连杆机构可用于控制舵面和推力矢量等。
通过优化设计,连杆机构可以更好地满足不同领域的需求,提高机械的性能和效率。
基于ADAMS的空调连杆机构优化设计赵成龙 刘 汉(珠海格力电器股份有限公司 珠海 519070)摘要:本文研究了连杆运动机构平稳性的优化设计。
运用ADAMS建立连杆机构虚拟模型,并通过ADAMS分析研究,主要针对运动轨迹优化设计、连杆运动轨迹方案设计负载及摩擦系数对机构的平稳性进行研究,从而研究连杆运动机构平稳性影响因素及解决方案。
关键词:连杆;平稳性;负载;摩擦Abstract:A study is made on optimal design for stability of linkage mechanism. This paper focus on trajectory op-timization including linkage trajectory’s scheme and stability of mechanism which is influenced by the load and the friction coefficient in order to research influence factor and solution on stability of linkage mechanism.Key words:linkage; stability; load; frictionAir-condition Linkage Mechanism Optimizing Design Based on ADAMS随着科技发展,房间空调器功能更加人性化,外观更加美观、绚丽,为了实现不同工况下导风方式和角度的多样化,导风板采用运动机构驱动十分普遍,主要采用齿轮齿条机构或连杆机构方式;齿轮齿条的上支架结构能保证稳定的运动形态,但机构生产加工及安装有较大困难,且增加的约束副会增大额外的摩擦力及预应力。
而连杆机构的运行依靠平滑的轨道,运动会更加平稳,但连杆的受力的情况较为依赖运行轨迹的设定,不当的设计会造成整个机构卡死或震动,因此对连杆运行轨迹的优化十分必要。
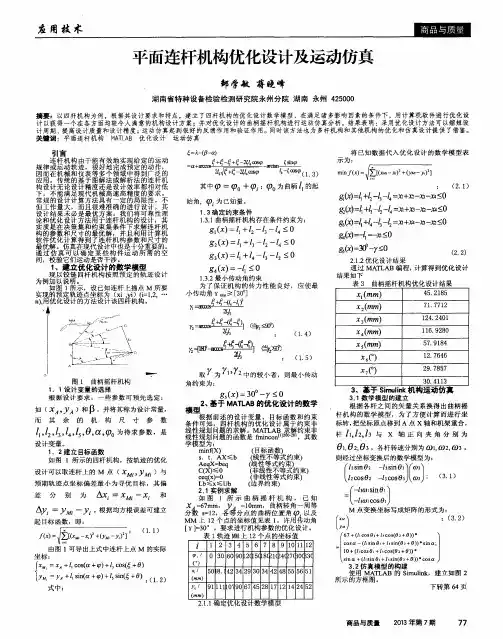
所示,活塞连杆机构优化前后的尺寸数值对活塞连杆在满足强度和刚度要求的情况下可以在更小尺寸时承受同样的作用力。
图1活塞连杆优化前后对比
(a )活塞连杆优化前尺寸图
(b )活塞连杆优化后尺寸图
从优化结果分析可知:当活塞连杆机构受到的力保
持不变时,活塞连杆的体积由原来的31592mm 3,减小为28439mm 3,减少了9.98%;质量由0.97306kg ,变小为0.83199kg ,减小了14.5%。
活塞连杆体可以在该尺寸的情况下满足刚强度要求。
减轻其体积可以减少原材料的浪费、降低成本、对提高企业的竞争力有重要的实际意义。
2.4强度校核2.4.1活塞连杆最大压缩工况结果分析
——————————————————————
—作者简介:张初旭(1988-),女,吉林双辽人,讲师,硕士研究生,
研究方向为汽车发动机。
Input Geometry P1P2P3P4P5P6P7
6.72×10m,最大位移为6.24×10m。
与优化前最大应力值
图2活塞连杆体优化后压工况下的应力图
图3活塞连杆体优化后压工况下的位移图
图4活塞连杆体优化后拉工况下的应力图
(
图5活塞连杆体优化后拉工况下的位移图。
变距连杆机构的运动学分析与机构优化设计引言:变距连杆机构是一种常见的机械结构,广泛应用于各种机械设备中。
通过对变距连杆机构的运动学分析和优化设计,可以提高机构的性能和效率,实现更好的工作效果和运动控制。
本文将重点探讨变距连杆机构的运动学分析和机构优化设计的相关内容。
一、变距连杆机构的基本原理变距连杆机构由一系列连杆和关节组成,通过关节的连接和相互作用,实现机构的运动控制。
其中,连杆是变距连杆机构的关键组成部分,其长度和角度决定了机构的运动范围和效率。
在进行运动学分析和优化设计前,我们首先需要了解变距连杆机构的基本原理。
二、变距连杆机构的运动学分析1. 运动学参数的表示方法变距连杆机构的运动学参数包括连杆长度、连杆角度、角速度等,这些参数对于机构的运动和控制起着重要作用。
在进行运动学分析时,我们需要对这些参数进行准确定义和表示。
2. 位移、速度和加速度分析变距连杆机构的位移、速度和加速度是机构设计和控制的基本依据。
通过对机构的连杆尺寸、机构输入位置等因素进行分析,我们可以求解机构的位移、速度和加速度,从而进行运动学分析。
三、变距连杆机构的机构优化设计1. 运动学性能优化在变距连杆机构的设计中,需要关注机构的运动学性能。
通过调整连杆的长度和角度,我们可以优化机构的运动范围、运动平稳性和驱动力等性能指标。
2. 动力学性能优化除了运动学性能外,变距连杆机构的动力学性能也是设计和优化的关键点。
例如,我们可以通过优化连杆的材料和形状,减小机构的质量和惯性矩,提高机构的动力学性能。
3. 结构材料和参数的优化选择变距连杆机构的结构材料和参数选择对机构的性能和寿命有着重要影响。
在进行机构优化设计时,我们可以考虑选择轻质高强度材料,同时合理设计结构参数,以提高机构的效率和寿命。
四、应用案例分析通过对实际应用案例的分析,我们可以更深入地理解和应用变距连杆机构的运动学分析和机构优化设计。
例如,在汽车发动机的活塞连杆机构中,通过优化连杆的长度和形状,可以使发动机运转更加平稳,并降低能量损耗。