海浪谱公式总结讲义
- 格式:ppt
- 大小:123.50 KB
- 文档页数:13
海浪方向谱估计方法海浪谱(功率谱和方向谱)是随机海浪的一个重要统计性质,它不仅包含着海浪的二阶信息,而且还直接给出海浪组成波能量相对于频率和方向的分布,这正是海洋工程和航海领域等特别关心的。
谱方法已经成为研究海浪及其有关问题的有力工具,如何确定海浪谱(功率谱和方向谱)也成为海浪研究的中心问题之一。
海浪方向谱是二维海浪谱,可以描述海浪能量相对于频率和方向的分布,以及海浪空间的一些统计特征。
尽管海浪方向谱的研究要比海浪频谱困难的多,但由于海洋研究诸多领域(海气相互作用、上层海洋动力学、海浪预报、海洋遥感、海洋工程等)的迫切学要,近30年来人们通过各种手段来努力获取它。
获取海浪方向谱信息主要又两种方式:直接测量方式和遥感方式。
1直接测量方式又叫现场测量方式,主要有定点测量方法和阵列法两种。
定点测量方法常见的有PUV传感器法和方向波浮筒法。
测试仪器包括垂荡/纵摇/横摇浮筒、位移浮筒、速度跟踪浮筒、流速压力传感器矩阵(Allender1989)等。
早期的PUV传感器包括电磁速度传感器和压力传感器,在使用中要特别注意平均水深的变化,要精确设定压力传感器和速度传感器的高度。
高度不同会对波浪谱的谱型带来一定的影响。
近年来,由于声学传感器可以进行远程测量,远离传感器本身的噪声,而且它的测速精度更高,因此正逐渐取代电磁传感器。
如SZS2-1坐底式声学波流测量仪,该仪器自水底向上垂直测量水体的流速度剖面和波浪高度、反演波浪方向谱及波浪特征值。
系统集流速剖面与波浪方向谱、能谱以及波浪特征参数测量于一体,可长期连续测量,实时地以图形方式显示流速剖面、各层流速、流向,二维、三维波向谱图和各种辅助传感器的数据。
数据以文件形式存储并可通过RS-232口实时送出,使用起来非常方便。
阵列法阵列测波仪可以较好地测量波浪信息,但安装困难,分析复杂。
国家海洋局的林明森完成了海浪方向谱的阵列式波浪仪系统的波浪特征值、方向谱的计算软件及数据无线传输的软件研制。


描述海浪内部能量相对于频率和方向的分布。
为研究海浪的重要概念。
通常假定海浪由许多随机的正弧波叠加而成。
不同频率的组成波具有不同的振幅,从而具有不同的能量。
设有圆频率ω的函数S(ω),在ω至(ω+ω)的间隔内,海浪各组成波的能量与S(ω)ω成比例,则S(ω)表示这些组成波的能量大小,它代表能量对频率的分布,故称为海浪的频谱或能谱。
同样,设有一个包含组成波的圆频率ω和波向θ的函数S(ω,θ),且在ω至(ω+ω)和θ至(θ+ω)的间隔内,各组成波的能量和S(ω,θ)ωθ成比例,则S(ω,θ)代表能量对ω和θ的分布,称为海浪的方向谱。
将组成波的圆频率换为波数,可得到波数谱;将ω换为2π(频率为周期的倒),得到以表示的频谱S()数。
以上各种谱统称为海浪谱。
海浪谱不仅表明海浪内部由哪些组成波构成,还能给出海浪的外部特征。
比如,理论上可由谱计算各种特征波高和平均周期,利用这些特征量连同波高与周期的概率密度分布,可推算海浪外观上由哪些高低长短不同的波所构成。
若已知海浪的谱,海浪的内外结构都可得到描述,因此谱是非常有用的概念。
事实上,海浪的研究(包括许多应用问题),大多和谱有关。
频谱在海浪谱中,风浪频谱得到最广泛的研究,因为它的应用最广,也最易于得到。
但尚无基于严格理论的风浪频谱。
已提出的经验的或半经验的频谱很多,大多数用[245-1]的乘积来表达。
通常p为5~7,q为2~4,在正量A和B之内。
除了数值常数外,还包含风要素(如风速、风时和风区)或浪要素(如特征波高和周期)作为参量,故谱的形状随风的状态或对应的浪的状态而变化。
上述两项的乘积代表的谱,在ω=0处为0,在0附近的值很小,ω增加时,它骤然增大至一个峰值,然后随频率的增大而迅速减小,在ω→∞ 时趋于0。
这表明谱的频率范围在理论上虽为0~∞,但其显著部分却集中在谱峰附近。
海面上存在的许多波,其显著部分的周期范围很小,恰和理论结果相对应。
随着风速的增大,谱曲线下面的面积(从而风浪的总能量或波高)增大,峰沿低频率方向推移,表明风浪显著部分的周期增大。
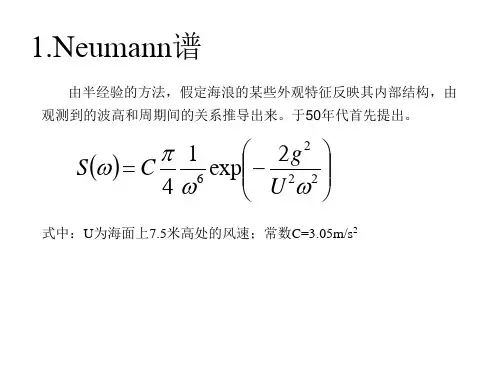
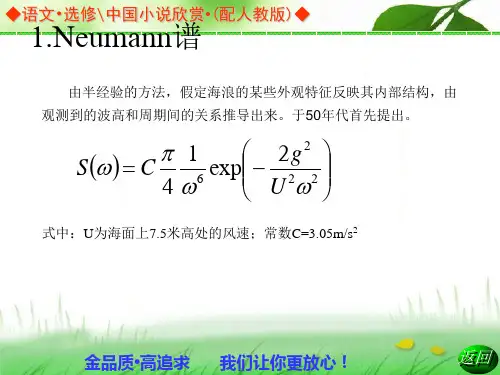
常见海浪波谱word版本1.Neumann谱由半经验的方法,假定海浪的某些外观特征反映其内部结构,由观测到的波高和周期间的关系推导出来。
于50年代首先提出。
式中:U为海面上7.5米高处的风速;常数C=3.05m/s2。
2.P-M谱皮尔逊和莫斯克维奇根据在北大西洋一定点上测得的大量数据,于1964年提出。
适用于充分成长的海浪。
式中:a=0.0081;β=0.74;g为重力加速度;U为离海面19.5m处的风速。
P-M谱为经验谱,依据的资料比较充分,分析方法合理,使用也方便。
目前采用的大多数标准波谱主要是基于P-M谱的形式建立的。
但是它仅包含一个参数U,不足以表征复杂的海浪情况。
3.ITTC谱国际拖曳水池会议(ITTC,1972)对P-M谱进行了修改,得到ITTC谱。
基于P-M谱有:由于P-M谱中:代入后得ITTC 谱:式中:ζw/3为三一平均波高,不是波幅。
4.双参数海浪谱1978年第15届ITTC 采用了双参数谱,双参数谱改进了ITTC 谱,对成长中的海浪也适用。
基于ITTC 谱有:3/410.30638m A /B =1/4410112 5.127691T m /m /B B /T π===或代入后得到双参数海浪谱:5.ISSC 谱国际船舶结构会议ISSC1964推荐下列谱公式,且常称之为ISSC 谱。
()24250.10.1110.110.44s H S f exp T f T f ⎡⎤⎛⎫⎛⎫⎢⎥=- ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦6.JONSWAP 谱该谱由“北海海浪联合计划”测量分析得到,在60年代末期提出,适合像北海那样风程被限定的海域,有两种表示形式。
a.由风速和风程表示的谱公式:()()()24225 1.25p p exp p g S exp ωωσωζωαωγωω⎡⎤-⎢⎥-⎢⎥⎢⎥⎣⎦⎧⎫⎛⎫⎪⎪=-⎨⎬ ⎪⎝⎭⎪⎪⎩⎭式中:α为无因次常数,可取α=0.0076(gx/U 2)-0.22;x 为风区长度(风程);U 为平均风速; ωp 为谱峰频率,可取ωp =22(g/U)(gx/U 2)-0.33 ; γ为谱峰提升因子,平均值为3.3;σ为峰形参数,当ω≤ωp 时,可取σ=0.07;当ω>ωp 时,取σ=0.09。
第七章 波浪理论及其计算原理在自然界中;常可以观察到水面上各式各样的波动,这就是常讲的波浪运动,它造成海洋结构的疲劳破坏,也影响船的航行和停泊的安全。
波浪的动力作用也常引起近岸浅水地带的水底泥沙运动,致使岸滩崩塌,建筑物前水底发生淘刷,港口和航道发生淤积,水深减小,影响船舶的通航和停泊。
为了海洋结构物、驾驶船舶和船舶停靠码头的安全,必须对波浪理论有所了解。
一般讲,平衡水面因受外力干扰而变成不平衡状态,但表面张力、重力等作用力则使不平衡状态又趋于平衡,但由于惯性的作用。
这种平衡始终难以达到,于是,水体的自由表面出现周期性的有规律的起伏波动,而波动部位的水质点则作周期性的往复振荡运动。
这就是波浪现象的特性。
波浪可按所受外界的干扰不同进行分类。
由风力引起的波浪叫风成波。
由太阳、月亮以及其它天体引起的波浪叫潮汐波。
由水底地震引起的波浪叫地震水波由船舶航行引起的波浪叫船行波。
其中对海洋结构安全影响最大的是风成波。
风成波是在水表面上的波动,也称表面波。
风是产生波动的外界因素,而波动的内在因素是重力。
因此,从受力的来看;称为重力波。
视波浪的形式及运动的情况,波浪有各种类型。
它们可高可低,可长司短。
波可是静止的一一驻波(即两个同样波的相向运动所产生的波,也可以是移动的——推进波以一定的速度将波形不变地向一个方向传播的波),可以是单独的波,也可以是一个接一个的一系列波所组成的波群。
§7-1 液体波动理论一、流体力学基础1、速度场 描述海水质点的速度随空间位置和时间的变化规律的一个矢量。
),,,(t z y x V V =它的三个分量为:x 方向的量:),,,(t z y x u u =y 方向的量:),,,(t z y x v v =z 方向的量:),,,(t z y x w w =2、速度势 对于作无旋运动的液体,存在一个函数,它能反映出速度的变化,但仅仅是反映速度大小的变化,这个函数称为速度v的势函数,简称速度势: ),,,(t z y x φφ=3、速度与速度势的关系x u ∂∂=φ, y v ∂∂=φ, zw ∂∂=φ 二、海水运动的基本假设1、海水无粘性,只有重力是唯一的外力;2、液体自由液面上的压力为常数;3、液体波动振幅相对于波长为无限小;4、液体作无旋运动。