数字近景摄影测量
- 格式:docx
- 大小:744.15 KB
- 文档页数:17
数字近景摄影测量测图应用探讨摘要:国家社会经济的不断进步与发展,极大地促进了数字近景摄影测量测图技术的飞跃,研究其相关课题对于提升测图的整体效果具有极为关键的意义。
本文首先介绍了数字图像处理,分析了数字近景摄影测量关键技术,并研究了数字近景摄影测量技术的应用,望对相关工作的开展有所裨益。
关键词:数字近景摄影;测量;测图;应用1前言随着数字近景摄影测量测图应用条件的不断变化,对其技术方法提出了新的要求,因此有必要对其相关课题展开深入研究与探讨,以期用以指导相关工作的开展与实践。
基于此,本文从概述相关内容着手本课题的研究。
2数字图像处理图像处理技术作为一项基础技术在各种领域都有着应用。
图像是三维景物的二维投影,三维景物的很多信息并不能在二维图像上体现出来。
摄影测量双像测量是图像三维信息提取的基础技术,通过影像匹配代替传统人工观测,将原始相片的灰度转变为电子、光学、数字等不同形式信号。
影像相关是通过不同信号之间的关联函数评价相似性。
取出特定点中心小区域影像信号,之后在另一个影像区域中区域对应区域影像信号,求得相关函数,以影像新红分布相似区域作为同名区域。
这是自动化立体测量的基本原理。
2.1数字相关数字图像处理使用了数字相关技术,利用计算机进行数字影像数值计算,进行影像的匹配。
数字相关算法除了相关函数,还有协方差函数、差绝对值和、相关精度等方法,数字相关通常都是二维搜索过程,通过核线相关原理的引入,能够进一步简化为一维搜索。
2.2二维相关二维相关首先在影像上确定一个待定点作为目标点,之后以目标点选择一定像素数的灰度阵列,作为目标区域,同时在另一个影像上搜索同名点,估算同名点可能存在的范围,建立同样大小的灰度阵列进行搜索,计算和目标区域的相似度。
2.3一维相关核线影响上进行一维搜索,理论来说,目标窗和搜索窗均可视作一维窗口,但是两个影像窗口相似性通常都是统计量,为了提高结果可靠性,需要尽量丰富的样本,所以目标窗口像素不能过少,而且目标区域过长会造成灰度信号中心和集合中心之间不重合,相关函数高峰值和最高信号值一致,影像几何变形影响下会出现很大误差。
数字近景摄影测量技术在文物保护以及工业摄影测量中的应用学院:测绘工程班级:姓名:学号:日期:年4月30日摘要对珍贵文物进行数字化处理,建成基于网络的数字化博物馆系统,可以较好地解决丰富的展品与有限的展览空间、时间的矛盾,进一步开拓博物馆藏品保护、研究和展示的新领域,还可以实现博物馆管理观念和管理手段的现代化。
更重要的是精确的文物数字模型记录了文物原始的真实三维信息和纹理信息,为文物修缮和恢复提供了重要的数据和模型支持。
ABSTR AC TValuable cultural relics are digitized , built ne t work base d digital museum system , what can better solve the problem what is the space and time about the exhibits , and further explore the museum protection, research and di splay a new field , also can realize the museum manage ment ideas and modern management tools . More import ant is the precise relics digital model recorded relics pri mitive true 3D information and texture information , for the resto ration of cultural relics and recovery and provide important data model support .目录1.1 背景和意义 (4)1.2 国内外研究现状 (5)2 摄影测量基本原理及一些方法 (7)3 近景摄影测量在考古中的运用 (7)4 案例分析 (8)5近景摄影测量在工业中的运用 (11)6 案列分析 (11)参考文献 (18)1. 1 研究背景和意义陕西是中华远古文明的重要发祥地,早在一百万年以前,就有人类在此繁衍生息。
近景摄影测量技术的原理与方法摄影测量技术是一种利用摄影镜头和摄影基地进行测量的方法。
它广泛应用于测绘、建筑、地质、航空、水利和农林等领域。
目前,近景摄影测量技术在工程测量中得到了越来越广泛的应用。
下面将从原理和方法两个方面来探讨近景摄影测量技术。
一、原理近景摄影测量技术的原理主要包括相对定向和绝对定向两个方面。
1. 相对定向相对定向是指通过在不同位置、不同方向上进行拍摄,将照片上的特征点通过观测量的方法确定相对于摄影基地的空间位置和方向。
这一过程主要涉及到几何学和成像原理。
首先,相机的光学系统会将三维空间中的点投影到二维照片上。
然后,在照片上选择一些特征点,通过观测其在不同照片中的位置变化,就可以确定这些点相对于摄影基地的空间位置和方向。
2. 绝对定向绝对定向是指通过在地面上布设一些控制点,利用这些控制点与照片上的同名点之间的空间关系来确定摄影基地的位置和方向。
为了实现绝对定向,可以使用全站仪、GPS等仪器来测量控制点的坐标。
然后,在照片上找出与这些控制点对应的同名点,并计算它们之间的像空间关系,从而实现摄影基地的定位。
二、方法近景摄影测量技术的方法包括影像预处理、像控制点测量、相对定向、绝对定向和数字表面模型(DSM)生成等步骤。
1. 影像预处理影像预处理是为了提高照片的质量,包括对照片进行几何校正、辐射校正和噪声去除等。
几何校正是通过对照片进行摄影几何校正,消除摄影机的摄影畸变,使得照片上的特征点能够准确地反映其在现实世界中的位置。
辐射校正是通过校正照片的辐射值,消除由于光照条件不同而导致的亮度差异。
噪声去除是通过采用滤波等方法,去除照片上的噪声点,提高照片的清晰度。
2. 像控制点测量像控制点测量是指在照片上标示出一些已知位置的控制点,并测量它们在照片上的像空间坐标。
为了提高像控制点的精度,可以使用高精度的测绘仪器进行测量,并结合地面控制点来进行验证。
3. 相对定向相对定向是通过在照片上选择一些特征点,并观测它们在不同照片中的位置变化,实现摄影基地的定位。
数字近景摄影测量相机-图文d30metric5RolleiMetricCDW处理来自数字式或者相类似的图像系统中图像数据。
具有广泛配套的可交换镜头、不可比拟的操作方便性,以及全方位的附件,RolleiMetric栅格相机提供最理想的定点成像系统。
这些相机被设计成带有栅网—带有测微计的玻璃盘—精确栅格—一直在胶片表面。
这一设备能对胶片变形进行数字校正。
这是保证摄影测量估算精度的必备的条件。
照片类似物的数字化可用带有不同模型的扫描仪进行处理。
对于不同的应用目的,RolleiMetric提供一个大幅面高效率扫描仪和专业介质格式扫描仪。
因而,相片及其类似物的不同分辨率的快速数字化是可能的。
图像处理RolleiMetricCDW已经成为智能的设计-定位图像管理系统。
RolleiMetricCDW是由RolleiFototechnic.公司设计的新的数字图像计算软件。
高性能、使用简单、面向用户的功能为摄影测量多影像计算提出信的标准。
它能以每个用户自定义的分辨率快速处理黑白和彩色图像(16.7百万种颜色)图像估算测量函数的人性化设计便于图像的初始化、点测量以及物体几何特征的获取。
Rollei测量相机提供自动栅网测量工具,支持通过摄影测量图像线信息(核线几何)的表现进行测量。
还具有自动误差追踪功能和对严重缺陷数据的自动排除功能。
线性目标的获取允许估算结果在当前摄影测量图像上显示(叠加)。
计算RolleiMetricCDW把已被广泛接收的NAWE_OPT影像定位软件和新RolleiMetric光束法平差软件PROMPT,以及同名点实时定标和数字成像系统组成的工具包一体化成为一个整体。
即使在误差率达到50%的情况下,只要结果可以接受,仍然可进行计算。
对于缺乏经验的摄影测量用户,大量的综合性自动计算与影像平差是简单易用的。
CAD接口在用户习惯的硬件和软件环境进行CAD绘图。
满足用户的需求,RolleiMetric可在各种通用CAD格式中传递数据。
数字近景摄影测量技术在文物保护以及工业摄影测量中的应用学院班级姓名学号日期:年月日数字近景摄影测量技术在文物保护以及工业摄影测量中的应用摘要本文主要对近景摄影测量学进行简单概述,然后介绍了有关近景摄影测量工作流程,再介绍了近景测量在各个领域方面的应用,最后通过案例重点分析了在文物保护以及工业摄影测量中的应用。
关键词:近景摄影测量文物保护工业摄影测量一、概述近景摄影测量(Close-range Photogrammetry)是摄影测量与遥感学科的一个分支。
通过摄影手段以确定(地形以外)目标的外形和运动状态的学科分支称为近景摄影测量。
随着技术不断发展从而形成了建筑摄影测量,工业摄影测量,生物医学和生物工程摄影测量三门分支学科,其目的是精密控制量测不规则表面实体凸凹不平的现状和形态,并能立体再现,提供静态目标的平面图、立面图、等值线图、影像图、纵横剖面图、轮廓线图、仰视图、斜视图、特写图、晕渲图和模型纹理图、三维虚拟景观图、三维可视化或三维空间座标,还可提供动态目标的运动轨迹或变形参数。
近景摄影测量技术的特点是“凡可以摄影的东西都可以量测”,因此决定了其应用的广泛性和成果的多样性。
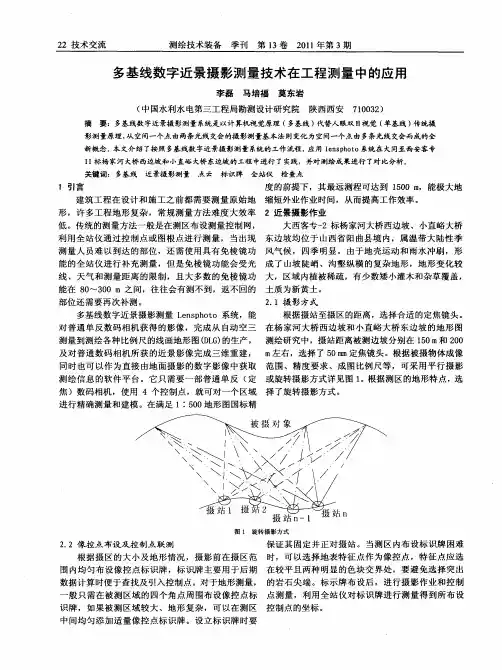
二、近景摄影测量基本原理与作业流程1.基本原理近景摄影测量的基本原理是,以立体数字影像为基础,由计算机进行影像处理和影像匹配,自动识别相应像点及坐标,运用解析摄影测量方法确定目标物体的三维坐标并输出数字高程模型、正射影像以及矢量线划图等陈〕其目的是精密控制量测不规则表面实体凸凹不平的现状和形态,并能立体再现,提供静态目标的平面图、立面图、等值线图、影像图、纵横剖面图、轮廓线图、晕渲图和模型纹理图、三维虚拟景观图,还可以提供目标的动态轨迹或变形参数2.作业流程近景摄影测量主要工作流程为:方案拟定、精度估算、模拟试验与优化设计、摄影机或摄像机的选择与检校、摄影方式的确定、立体像对的获取方案、摄影机或摄像机同步方法的确认、照明的布置、人工标志的设计与制作、控制方式的选取、相对控制网的建立、活动控制系统、包括标志自动识别在内的各种图像处理方法的确定、外业成果获取、内业摄影测量方案(模拟、半解析、解析、数字、全数字法)的确定、坐标系旋转、数学模型的选认、各种应用软件、三维虚拟景观图、三维漫游可视化和虚拟漫游、影像数字化图像处理技术、直接线性变换最小二乘与人机协调相关三维立体模型等。
近景摄影测量原理近景摄影测量原理什么是近景摄影测量近景摄影测量是一种利用相机拍摄近距离物体的方法来测量其形状、尺寸和位置的技术。
它常用于建筑、工程、文物保护等领域,可以高效且准确地获取物体的三维信息。
摄影测量的基本原理摄影测量基于几何光学原理,通过相机拍摄的影像来还原物体的几何形态。
它的基本原理可以概括为以下几点:1.像素坐标系统摄影测量将相机传感器上的像素与物体的几何点相对应。
每个像素都有唯一的坐标,可以通过相机标定参数将其映射到物体空间中的三维坐标。
2.焦平面相机的像平面与镜头之间有一个均匀分布的焦平面。
焦平面以镜头中心为中心,平行于传感器,用于记录入射光线。
3.相机标定相机标定是摄影测量的基础,它通过测量相机的内外参数来建立像素与物体坐标之间的映射关系。
内参数包括焦距、主点位置等;外参数包括相机在物体坐标系中的位置和姿态。
4.立体视觉利用两个或多个相机同时拍摄同一物体的影像,可以通过立体视觉原理来推导出物体的三维坐标。
立体视觉基于两个影像的视差来还原物体的深度信息。
近景摄影测量流程近景摄影测量的流程可以简化为以下几个步骤:1.摄影计划在开始进行近景摄影测量之前,需要进行摄影计划,确定拍摄的位置、角度和距离等参数,以获得所需的影像内容。
2.相机标定利用相机标定板等工具,对摄影机进行标定,获取相机的内外参数,以建立像素与物体坐标之间的映射关系。
3.影像获取使用相机拍摄物体的多个影像,包括不同角度和距离的影像,以覆盖物体的全貌和细节。
4.立体匹配利用多个影像进行立体匹配,通过视差计算物体的三维坐标。
常用的方法有基于特征点匹配的立体视觉算法。
5.三维重建通过立体匹配得到的三维坐标,进行三维重建和点云生成,以获取物体的真实形态。
应用领域近景摄影测量技术在以下领域有广泛应用:•建筑和工程近景摄影测量可以在建筑和工程项目中用于生成数字模型、量测结构变形、检测施工质量等。
•文物保护近景摄影测量可以用于对文物进行三维数字化保护和虚拟展示,还原文物原貌并进行精细分析。
近景摄影测量技术介绍摄影测量是一种通过摄影设备来获取地面上物体位置、形状和尺寸等信息的测量方法。
近景摄影测量技术,顾名思义,是指在短距离范围内进行摄影测量的一种方法。
本文将对近景摄影测量技术进行介绍,包括其原理、应用范围以及发展趋势。
一、近景摄影测量技术的原理近景摄影测量技术的原理基于摄影测量的基本原理,主要包括影像采集、像点匹配和三维坐标计算三个过程。
首先,影像采集是指使用摄影设备(如照相机或无人机)对目标区域进行拍摄,获取目标区域的影像数据。
这些数据可以通过摄影机的光学镜头或传感器捕获,并转化为数字图像。
其中,近景摄影测量技术常常使用高分辨率的数字相机或者已经预先标定的无人机。
其次,像点匹配是指对采集到的影像进行处理,找到其中的特征点并将其进行匹配。
这个过程需要使用计算机算法来进行,例如特征提取和特征匹配。
通过像点匹配,可以精确地确定同一个物体在不同影像中的位置,为三维坐标计算奠定基础。
最后,三维坐标计算是将匹配的像点转化为真实世界中的三维坐标。
这一过程涉及到摄影测量中的数学和几何转换,通过计算并解算一系列的几何方程,可以确定目标物体在三维坐标系中的位置和形态。
二、近景摄影测量技术的应用范围近景摄影测量技术在诸多领域具有广泛的应用。
下面介绍其中几个典型的应用领域。
1. 地质勘探与矿产资源评估:近景摄影测量技术可以用于对地质构造和地表地貌等进行测量和分析,以提供地质和矿产资源评估的依据。
通过高分辨率的影像数据,可以准确获取地质构造的信息,并研究矿产资源的分布情况和潜力。
2. 建筑与文化遗产保护:近景摄影测量技术可以对建筑物和文化遗产进行高精度的测量和保护。
利用三维坐标计算,可以获取建筑物的尺寸和形态等信息,辅助建筑设计和文物保护工作。
3. 城市规划与土地管理:近景摄影测量技术可以用于城市规划和土地管理。
通过获取城市区域的影像数据和三维信息,可以进行土地利用规划、道路设计和建筑物布局等工作,提高土地利用效率和城市规划的科学性。
数字近景摄影测量技术在文物保护以及工业摄影测量中的应用学院:班级:姓名:学号:日期:2015年5 月4 日目录1 绪论 (4)1.1 研究背景和意义 (4)1.1.1 研究背景 (4)1.2 国内外研究现状 (6)1.3主要研究内容和关键技术 (7)1.3.1 主要研究内容 (7)2相机的选择 (8)2.1近景检校内容 (8)2.2 计算机视觉方法 (8)2.3 算法实现 (9)2.3.1张正友平面网格算法程序 (10)2.3.3 实验分析 (11)2.4.2 摄影方式 (12)3.1 数据采集 (13)3.1.1 影像采集 (13)3.1.2 控制点采集 (14)4.试验流程 (16)5工程案例 (16)5.1.1立方体案例 (16)5.2大雁塔佛像案例 (16)5.3 大雁塔操作示意图 (17)5.1.3 实验分析 (17)5.2近景摄影测量建模实例分析 (17)5.2.1实验分析 (17)参考文献 (19)摘要对珍贵文物进行数字化处理,建成基于网络的数字化博物馆系统,可以较好地解决丰富的展品与有限的展览空间、时间的矛盾,进一步开拓博物馆藏品保护、研究和展示的新领域,还可以实现博物馆管理观念和管理手段的现代化。
更重要的是精确的文物数字模型记录了文物原始的真实三维信息和纹理信息,为文物修缮和恢复提供了重要的数据和模型支持。
由于古文物具有轮廓复杂、不易接触、丰富的纹理信息等特点,因此如何迅速而准确获取古文物的DSM 成为一个关键点。
数字近景摄影测量技术成本低廉、数据量小、处理速度快捷,精度也完全满足需求,因此,数字近景摄影测量在古文物三维重建方面有不可比拟的优势。
本文通过对一般摄影测量软件和专业近景软件进行探索研究,成功的实现了应用一般摄影测量软件对近景数据的快速高精度处理。
本文使用非量测数码相机与全站仪分开作业的方法,获取古文物的三维坐标,研究分析了近景数据预处理过程,利用最优检校算法和标定参考物对相机进行精确检校,得到相机参数,然后使用一般摄影测量软件快速建立文物的DEM ,生成等值线和正射影像,再进行图像配准,解决纹理映射和模型无缝拼接问题,最后将生成的三维模型导入3dmax 中,赋予相应的材质,从而实现古文物三维建模。
数字近景摄影测量在建筑物变形监测中的应用摘要:本文介绍了数字近景摄影测量的基本概念,回顾了数字近景摄影测量技术应用于建筑物测绘的研究,并重点分析了在建筑物变形监测中的应用,表明利用数字近景摄影测量技术观测建筑物变形的方法具有效率高、质量好等显著优点。
并展望了数字近景摄影测量技术的未来发展。
1.数字近景摄影测量1.1 数字近景摄影测量的基本概念近景摄影测量也称非地形摄影测量,是指在0-300m 近距离范围对所研究的各类目标进行摄影,通过对拍摄的图像加工处理,从而确定静态目标的点坐标、表面形状以及动态目标的活动轨迹。
近景摄影测量一般包括近景摄影和图像处理两个过程。
随着数码相机的广泛应用,价格愈来愈低廉,使用数码相机的数字近景摄影测量发展越来越快。
数字近景摄影测量是指以数字相机为图像采集传感器、并对所摄图像进行数字处理的近景摄影测量。
数码相机的出现和不断发展,极大地推动了数字近景摄影测量的发展[1]。
近景摄影测量的摄影机一般分为两种,即量测用的和非量测用的。
量测用的摄影机是指专为摄影测量设计的,在像框上设有框标,内方位元素已知或可记录,物镜畸变差很小,主距为固定的或可以调焦的。
非量测用的摄影机就是一般使用的相机,特点是内外方位元素一般不知,物镜畸变差比较大,且常常不够稳定。
进行数字近景摄影测量的多为以半导体技术CCD 电荷耦合器为基础的数码相机,属于非量测相机。
CCD 的状态及灵敏度可长期稳定,因此是可以检校的。
在进行精确摄影测量工作前,必须对普通数码相机进行严格的检校。
摄影机的检校是指检查和矫正摄影机内方位元素和光学畸变系数的过程。
1.2 数字近景摄影测量的解算模型数码相机所拍摄的影像内方位元素值未知,因此可以采用直接线性变换模型(Direct Linear Transformation 简称DLT )。
DLT 解法是建立像点坐标仪坐标和相应物点物方空间坐标之间直接的线性关系的解法[2,3]。
其基本公式为:01111094321=+++++++Z L Y L X L L Z L Y L X L x (1) 01111098765=+++++++Z L Y L X L L Z L Y L X L y (2) 式(1)和(2)中,L1至L11是11个系数,分别为相片的6个外方位元素(X s ,Y s ,Z s ,φ,ω,К),3个内方位元素(主点的坐标仪坐标x 0、y 0以及拍摄相片的x 方向主距f x ),y 方向相对x 方向的比例变化率d s (即比例尺不一性)以及x 、y 轴间的不正交性d β这11个参数的函数;X 、Y 、Z 是点的空间坐标;x 、y 是相应点的影像坐标。
数字近景摄影测量技术在文物保护以及工业摄影测量中的应用数字近景摄影测量技术在文物保护以及工业摄影测量中的应用目录1近景摄影测量概述 (1)2近景摄影测量的主要特点 (1)3近景摄影测量内容 (1)2.1近景摄影测量在龙门石窟保护中的应用12.2近景摄影测量在钢岔管水压试验变形检测中的应用34参考文献 (7)1近景摄影测量概述近景摄影测量是通过摄影和随后的图像处理以获取被摄目标形状大小和运动状态的一门技术。
凡是可以摄取其影像的目标,均可作为近景摄影测量的对象,以获得目标物上点群的三维空间坐标,以及基于这些空间坐标的长度、面积、体积等。
近景摄影测量的优点在于它兼有非接触性量测手段,不伤及被测物体,信息容量高且易存储,精度高,速度快,信息可重复使用。
这些优点使得该技术特别适用于测量包含有大量测量点位的目标物,躲避危险环境而远离摄影对象等情况。
2近景摄影测量的主要特点1)像片信息丰富、容量大,影像逼真,适用于不规则物体的外形测量。
2)涉及到的目标大小、摄影距离、精度要求、静态或动态等各个方面均有所不同,可通过合理地选择摄影仪器、摄影方式与布设控制,来解决科研与生产工作中的若干复杂问题。
3)能在瞬间摄影很多个点,可以在量测仪器上计算出所需的大量的物点的空间坐标,这是传统的大地测量方法所不能做到的。
4)摄影像片可以长期保存,便于日后对成果的查核、比较和分析。
5)与传统的大地测量和工程测量比较,它既可以减少外业工作量,减轻劳动强度,又提高了经济效益。
6)由图像经数字化仪器测定的最终数据三维坐标可构建三维立体景观,为不同用途的用户提供可靠准确的技术服务。
3近景摄影测量内容2.1近景摄影测量在龙门石窟保护中的应用我国地大物博,幅员辽阔,文化遗产极为丰富,作为我国最著名的3大艺术宝库之一的龙门石窟和少林寺历代高僧埋骨之处的少林寺塔林,以其独特的艺术魅力吸引着无数中外游客前来观光。
它们历尽沧桑,经过数十朝代的风风雨雨,已满目疮痍亟待修复。
数字近景工业摄影测量关键技术研究与应用数字近景工业摄影测量关键技术研究与应用摄影测量是数字近景测量中的一种重要技术手段,通过使用数字相机等设备来获取目标物体的图像信息,从而实现对物体的三维测量和数据分析。
随着数字近景工业摄影测量技术的不断发展,各种先进的关键技术相继涌现,为各行各业提供了广阔的应用前景。
数字近景工业摄影测量的关键技术主要包括图像采集、相机标定、影像处理与分析、物体三维重建和精度评定等方面。
首先,图像采集是数字近景工业摄影测量的基本环节。
在实际应用中,可以采用单目相机、多目相机、高速相机等设备进行图像采集,以获得目标物体的多角度、多视点的图像信息。
此外,还可以通过搭建图像采集系统,实现大范围、高分辨率的图像获取,从而满足不同应用需求。
其次,相机标定是提高数字近景工业摄影测量精度的重要手段。
通过对摄影测量设备进行标定,可以消除设备因素对图像测量结果的影响,提高测量的准确性和可靠性。
常用的相机标定方法包括内部参数标定和外部参数标定。
内部参数标定是通过测量相机内部的固有参数,例如焦距、控制点和像素大小等,从而确定真实世界坐标和图像像素坐标之间的关系。
而外部参数标定则是通过标定控制点在物体上的位置以及控制点在图像上的坐标,确定相机的外部参数,进而确定物体的三维坐标。
影像处理与分析是数字近景工业摄影测量中的核心环节,通过对采集到的图像进行处理和分析,可以实现对目标物体的特征提取、配准、匹配和变形分析等操作。
其中,图像配准是实现不同图像之间、不同时间点图像之间对应关系的重要技术。
通过使用配准算法,可以将多个图像进行对齐,从而提取出目标物体的三维信息。
此外,图像匹配是根据图像特征或者控制点实现图像对齐的关键步骤,不同的匹配算法适用于不同的场景和要求。
物体三维重建是数字近景工业摄影测量的核心目标之一。
通过使用摄影测量技术,可以实现对目标物体的三维几何结构的获取和重建。
在具体操作中,可以通过图像的立体视觉、三角测量和空间投影等数学方法,利用多个视点的图像信息进行物体的三维重建。
Lensphoto:一个令人惊奇的数字近景摄影测量优秀技术一种通过摄影,以少量几个点的空间坐标与影像丰富的信息结合在一起,快速建立高精度的被测对象数字立体模型(包括三维点云)及4D产品的测绘新技术。
计算机视觉技术的发展,拉近了摄影测量与工程测量的的关系。
而且随计算机技术的不断发展,现代数字近景摄影测量必将在工程测量领域、数字文物领域占据更大的地位。
——摄影测量顶级专家、中国工程院院士张祖勋先生的最新成就Lensphoto多基线数字近景摄影测量系统的工作原理:通过可靠的多基线立体匹配算法快速获取大量同名点,生成被测物体表面精确相对位置关系的自由网点云,其精度达到像素级。
然后通过对控制点坐标多光线前方交会及区域网自由网平差,自动生成物方区域所有三维坐标点,完成自由网的绝对定向,从而建立高精度的数字表面模型及测绘产品,整个过程高度自动化。
Lensphoto只需要一部普通单反数码相机,一部便携机,一台全站仪(测少量几个控制点),在现场就可以很快获得所需测量结果。
它的操作简单,不涉及理论,自动化程度很高,把从前复杂的近景摄影测量技术变成了简单的计算机软件操作。
与三维激光扫描仪及同类型量测软件相比,效率最高、精度最高、数据量最小、性价比最高!顶级影像匹配技术Lensphoto采用了著名摄影测量专家张祖勋院士最先进的多片立体匹配技术,其创新发明的多基线摄影测量技术将传统的基于双目视觉的近景摄影测量提高至高度自动化的计算机视觉阶段。
新可视化极强的RGB密集点云DSMLensphotoV3.0能便捷生成高精度的RGB数字表面模型DSM,其成果不逊激光扫描仪点云,且在效率、后续处理、外业采集条件限制等方面具有优势,是目前性价比甚高的新技术。
一键快速生成精密密集点云:道路:三张影像重叠度80%基坑横梁监测:(8张80%重叠度)✧独创全新摄影机制——旋转多基线摄影被摄物体摄站✧快高自动化操作便捷Lensphoto首次将自动空三及区域网平差运用到近景之中,更重要的是运用了著名摄影测量专家张祖勋院士的最新的世界领先水平的多片立体匹配技术,使得该系统具有高精度、高自动化、操作便捷、高效率等卓越特点。
数字近景摄影测量技术在文物保护以及工业摄影测量中的应用学院:测绘学院班级:姓名:学号:日期:2015 年 4 月29 日数字近景摄影测量技术在文物保护以及工业摄影测量中的应用摘要:随着计算机技术和测绘技术的不断发展,摄影测量发展到了全数字摄影测量阶段。
作为摄影测量学的一门分支学科——近景摄影测量在建筑物的变形观测,动态监测、文物保护等工作中起着很重要的作用。
本文着重介绍了近景摄影测量在文物保护和工业中摄影测量的应用。
关键词:全数字近景摄影测量;图像处理;立面地理空间数据获取;文物保护、工业摄影测量1、引言:近景摄影测量是通过摄影(摄像)和随后的图像处理与摄影测量处理以获得被摄目标形状、大小和运动状态的一门技术。
与其它测量手段相比,近景摄影测量的优点在于它兼有非接触性量测手段、不伤及被测物体、信息容量大、易存储、可重复使用等,特别适用于测量具有大批量的目标、躲避危险环境而远离摄影对象等工程。
随着计算机技术和数据处理技术的发展,现代近景摄影测量技术已广泛应用于各类建筑工程、机械制造、城市区域规划、医学、生物、古建筑与古文物研究、考古等部门。
原则上,凡是可获得其影像的各类目标,都可以使用近景摄影测量的相关技术,以某种精度测定和研究它的形状、大小以及运动参数等。
目前,几乎找不到未使用该技术的行业。
2 近景摄影测量技术的发展与特点2.1 近景摄影测量技术主要的特点2.1.1数字近景摄影测量基于传统光学胶片的摄影测量技术,由于处理胶片的步骤繁多以及时间冗长,难以满足现代快速定位、实时质量控制等应用领域的需求。
最近十几年,随着固态摄像机和CCD图像传感器以及相应摄影测量系统的出现,实现了数字影像数据从传感器到处理系统之间的快速传输,数字摄影测量技术由此应运而生。
数字近景摄影视觉测量是建立在数字成像、图像处理与识别以及精密测量原理基础上的新型工业现场三维精密测量技术,目前该技术在一般工业测量范围内,已能实现工业经纬仪系统和激光干涉跟踪测量系统类似的测量精度,而测量自动化水平大大提高,呈现良好的应用前景。
数字近景摄影测量技术在文物保护以及工业摄影测量中的应用学院:测绘学院班级:姓名:学号:日期:2015 年 4 月29 日数字近景摄影测量技术在文物保护以及工业摄影测量中的应用摘要:随着计算机技术和测绘技术的不断发展,摄影测量发展到了全数字摄影测量阶段。
作为摄影测量学的一门分支学科——近景摄影测量在建筑物的变形观测,动态监测、文物保护等工作中起着很重要的作用。
本文着重介绍了近景摄影测量在文物保护和工业中摄影测量的应用。
关键词:全数字近景摄影测量;图像处理;立面地理空间数据获取;文物保护、工业摄影测量1、引言:近景摄影测量是通过摄影(摄像)和随后的图像处理与摄影测量处理以获得被摄目标形状、大小和运动状态的一门技术。
与其它测量手段相比,近景摄影测量的优点在于它兼有非接触性量测手段、不伤及被测物体、信息容量大、易存储、可重复使用等,特别适用于测量具有大批量的目标、躲避危险环境而远离摄影对象等工程。
随着计算机技术和数据处理技术的发展,现代近景摄影测量技术已广泛应用于各类建筑工程、机械制造、城市区域规划、医学、生物、古建筑与古文物研究、考古等部门。
原则上,凡是可获得其影像的各类目标,都可以使用近景摄影测量的相关技术,以某种精度测定和研究它的形状、大小以及运动参数等。
目前,几乎找不到未使用该技术的行业。
2 近景摄影测量技术的发展与特点2.1 近景摄影测量技术主要的特点2.1.1数字近景摄影测量基于传统光学胶片的摄影测量技术,由于处理胶片的步骤繁多以及时间冗长,难以满足现代快速定位、实时质量控制等应用领域的需求。
最近十几年,随着固态摄像机和CCD图像传感器以及相应摄影测量系统的出现,实现了数字影像数据从传感器到处理系统之间的快速传输,数字摄影测量技术由此应运而生。
数字近景摄影视觉测量是建立在数字成像、图像处理与识别以及精密测量原理基础上的新型工业现场三维精密测量技术,目前该技术在一般工业测量范围内,已能实现工业经纬仪系统和激光干涉跟踪测量系统类似的测量精度,而测量自动化水平大大提高,呈现良好的应用前景。
近年来,数字成像器件和以计算机为基础的图像处理系统性能迅速提高,成本下降,使数字近景摄影视觉测量更具发展潜力。
同时,数字摄影测量技术通过与GPS/INS等进行多传感器集成,快速采集目标表面三维信息,并自动或半自动生成DOM、等值线图等,在道路测量等领域初步实现了数字摄影测量的实时化。
2.1.2三维激光扫描技术三维激光影像扫描技术是上世纪九十年代中期开始出现的一项高新技术,是继GPS空间定位系统之后又一项测绘技术新突破。
它通过高速激光扫描测量的方法,以被测对象的采样点(离散点)集合—称之为“点云”的形式获取物体或地形表面的阵列式几何图像数据。
可以快速、大量的采集空间点位信息,为快速建立物体的三维影像模型提供了一种全新的技术手段。
三维激光影像扫描技术又称“实景复制技术”,它可以深入到任何复杂的现场环境中进行扫描操作,并直接将各种实体的三维数据完整的采集到电脑中,进而快速重构出目标的三维模型及线、面、体、空间等各种制图数据。
同时,它所采集的三维激光点云数据还可进行各种后处理工作(如:测绘、计量、分析、仿真、模拟、展示、监测、虚拟现实等)。
所有采集的三维点云数据及三维建模数据都可以通过标准接口格式转换给各种工程软件直接使用。
三维激光影像扫描仪小型便捷、精确高效、安全稳定、可操作性强,能在几分钟内对所感兴趣的区域建立详尽准确的三维立体影像,提供准确的定量分析。
可以广泛应用于各行各业,如:快速建立城市模型、古建测量与文物保护、逆向工程应用、复杂建筑物施工、地质研究、建筑物形变监测以及在安全方面的应用等。
3 近景测量技术在文物保护中的主要应用3.1、制作城市建筑三维模型城市三维景观模型作为城市GIS的重要组成部分,在城市发展规划、城市景观建筑评估、建筑设计等领域具有广阔的应用前景,如城市规划中的建筑物景观模拟、地下管线的设计与三维显示等。
利用现代近景摄影测量技术建立城市建筑三维景观模型的主要方法有两种:一是直接利用传统GIS中的二维线划数据及相应的高度属性进行三维建模,利用摄影经纬仪或数码相机获取各建筑物的表面纹理,最后利用相应的图像处理软件粘贴表面纹理。
二是利用三维激光扫描系统对目标进行多角度扫描,直接得到目标物局部的三维点云数据,经过拼接处理得到目标物的三维点云模型,利用系统本身所带的同轴CCD相机得到目标物的纹理信息,经过图像粘贴处理即可得到目标物真实的三维景观模型。
利用第二种方法,通过数据处理,还可以得到目标物的彩色点云模型。
3.2 大型古代建筑物的精密测绘和古代遗址测绘测绘是对历史建筑现状记录的方法之一。
通过对建筑进行测量,然后以一系列图纸予以表达,这些图纸基本上是二维平面、立面、剖面和依然是绘于二维图纸上的轴册、透视图。
在图纸的绘制过程中,会根据建筑的建造规律,对实际测量数据进行简化和归纳,绘制出由现状得出的建筑设计图。
在完成的图纸上,建筑的一些实际偏差如变形、缺损、加工差异等被人为纠正。
这样的测绘被称为“法式测绘”,即按照营造法式绘制理想状态的建筑图。
法式测绘对于相对按照法式建造的官方宫殿类建筑比较有效,往往可以通过测量几个关键尺寸,就可以依照法式推算出其它相关尺寸,从而绘制出图。
甚至于“量一个柱础就可以绘制整个大殿”。
然而,法式测绘对于大量民间地方历史建筑遗存是很难适用的。
这类建筑具有明显的地域特色和丰富的变化创造。
测绘时没有法式可依,利用建筑测量手段只能逐一测量记录,稍有疏漏就难以完整表达。
另外,古建筑一般都经历了成百上千年的历史,由于自然和人为的破坏,亟待保护和修缮。
传统的古建筑测量方法很难精确测量建筑整体结构状况,如柱子和梁的倾斜、梁和枋的弯曲度、梁架的整体倾斜和沉降等。
利用现代近景摄影测量手段可以较好地解决这类问题。
在对名胜古迹和古代建筑物的测绘与保护中,引入三维激光影像扫描技术,能对相应的构筑物进行数字化处理,这对构筑物的保护及修复等具有重要意义。
作为一种全新的测绘技术,它具有许多新的特性及功能,研究该项技术和其他测绘技术间的差异,可以拓展这些新特性及功能的应用范围,如考古与遗址测绘、古迹保护与古代建筑的变形测量、文物修复和克隆、现场保护性数字影像记录、负载分析与安全监测等方面的应用。
3.3应用实例3.3.1 数字故宫建设故宫博物院是明清两代皇宫,拥有世界上最大、占地面积达78万平方米的古宫殿建筑群和100万件以上的历史文物。
1998年,故宫博物院开始了信息化的工作,此后提出了“数字故宫”的规划。
2002年故宫开始修缮工作后,采用地面激光扫描技术,采集了完整的统一坐标系的高密度、高精度的故宫三维模型数据,构建了故宫主要大殿的现状彩色立体模型,制作了现状剖面图。
在主要宫殿表面每大约5毫米就保存有一个空间坐标点,客观真实地记录了该建筑的现状特征,即使其中某些部分不复存在也可以根据这些数据将其复原。
其主要工作步骤包括:⑴点云模型的拼接;⑵点云模型坐标系的统一;⑶基于点云的三维模型建立[刘旭春等 2006],其成果如图1所示。
3.3.2 云冈石窟激光扫描数字化测绘现存的云冈石窟群,是1961年国务院公布的第一批全国重点文物保护单位之一。
整座石窟气魄宏大,外观庄严,雕工细腻,主题突出。
由于长期遭受风化、崩塌、溶蚀、窟体坍塌、裂缝等各种自然灾害的影响,石窟群面临着被毁坏的危险。
利用三维激光影像扫描技术和三维可视化技术采集、分析和描述这些石窟群及其承载体--崖面的特征与细貌,可以为文物的保护、修复提供真实、详尽的科学依据。
利用加拿大 Optech ILRIS-3D激光扫描仪对云冈石窟第20窟石佛进行了激光扫描。
从正面和两个侧面对佛像一共进行了3个基站的5次扫描,以点云的形式获取了佛像的三维影像信息。
同时,使用激光扫描仪自配的数码相机进行摄影,获取佛像的纹理信息。
由于第20号石佛十分高大,而扫描仪的扫描框幅有限,所以必须从不同的角度和方位对石窟进行激光扫描,以获取石窟中佛像完整的三维信息。
为了满足建立石佛整体三维模型的需要,不同基站扫描的点云影像之间至少需要15%的重叠度。
在拼接成新的点云模型以后,点云数据处理系统会自动生成一个新的、统一的扫描基站坐标系,同时赋予每个点在此新坐标系下的空间坐标。
在扫描过程中,为兼顾扫描时间和扫描石刻细节的需要,采用了不同的扫描点间距。
为了突出第20号佛像上石刻花纹和雕饰,在扫描基站和扫描距离不变的情况下,用11毫米和7毫米点间距对佛像进行了重复扫描。
激光扫描仪的扫描范围分别为水平方向50度、竖直方向50度。
在获取佛像点云数据和相应的数字影像信息以后,同时在点云和数字影像上寻找多于12个左右的同名点,建立点云中特征点与3072*2048框幅影像中特征像元之间的映射关系,生成真彩色的点云模型,如图2所示。
4、近景测量技术在工业中的主要应用4.1 数字影像坐标的自动量测数字影像坐标的自动量测是获取被检测目标的像点坐标的过程。
其量测的精度对匹配速度、匹配算法的适应性、检测结果的准确性具有决定性作用。
一般被摄目标与光源特性、被摄物体的性质、形状等因素有较大的关系。
为了使系统在没有人介入的情况下,自动完成处理影像信息的功能,针对我们所选择的检测目标的特性和被检目标的几何特征,对2台或2台以上CCD相机获取的数字立体影像,采用了目标点像素级的概略定位和子像素级的高精度定位。
4.1.1目标点的概略定位1.噪声衰减与图像增强。
由于外界环境光和CCD相机光电转换的不稳定在获取影像中含有噪声,可分别对高频和低频噪声进行处理。
影像增强是为了强调一些重要的特征,如目标点或边缘线等。
2.影像的二值化。
经噪声衰减与图像增强的影像,采用先利用阈值T=(最小灰度值+平均灰度值)/2将搜索窗口中的影像二值化为gij(i=0,1,…,n-1;j=0,1,…,m-1)。
3.圆孔影像的圆心坐标点定位。
在二值化影像基础上,可采用四连通或八连通域的方法对整个图像进行扫描,给每一连通区域进行惟一的标记,扫描完成后可得到具有不同标记的二值灰度影像。
本文应用Wong圆点定位算子提取了圆孔影像的圆心坐标。
利用对称的几何影像的对称中心与其灰度重心一致的灰度重心法定位的原理。
该算子是通过计算同一标记的圆形目标的灰度重心提取其圆心坐标。
计算公式为4.非检测目标的剔除。
为了防止将其他灰度均匀的区域错误地搜索为圆形目标,可根据影像的特征先滤去这些区域。
利用扫描标记的灰度的统计特性,将具有相同标记的像素进行统计,将远大于或小于某灰度范围的影像进行剔除。
也要将同一标记的圆度γ,作为剔除的标准。
求得灰度重心后按式(2)计算这个区域的圆度γ4.1.2 目标点的高精度定位为进行子像素级的高精度定位,运用概略坐标一定范围的窗口,利用原始灰度影像,采取最小二乘法匹配以达到子像素级的目的。