第五章 等参元和数值积分PPT课件
- 格式:ppt
- 大小:3.19 MB
- 文档页数:34

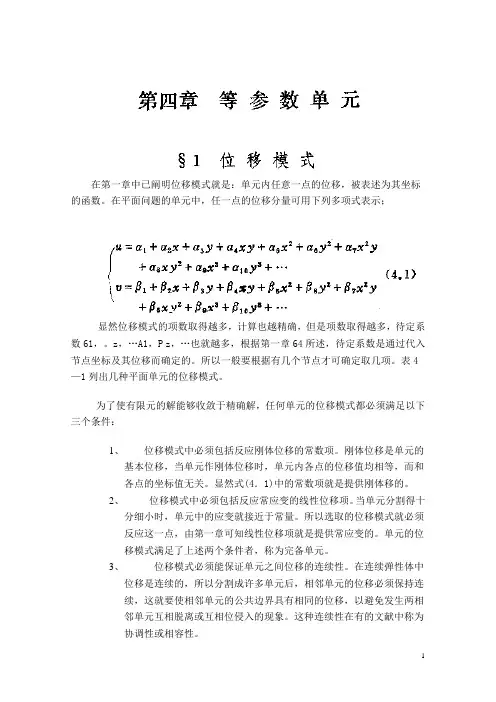
在第一章中已阐明位移模式就是:单元内任意一点的位移,被表述为其坐标的函数。
在平面问题的单元中,任一点的位移分量可用下列多项式表示;显然位移模式的项数取得越多,计算也越精确,但是项数取得越多,待定系数61,。
z,…A1,P z,…也就越多,根据第一章64所述,待定系数是通过代入节点坐标及其位移而确定的。
所以一般要根据有几个节点才可确定取几项。
表4—1列出几种平面单元的位移模式。
为了使有限元的解能够收敛于精确解,任何单元的位移模式都必须满足以下三个条件:1、位移模式中必须包括反应刚体位移的常数项。
刚体位移是单元的基本位移,当单元作刚体位移时,单元内各点的位移值均相等,而和各点的坐标值无关。
显然式(4.1)中的常数项就是提供刚体移的。
2、位移模式中必须包括反应常应变的线性位移项。
当单元分割得十分细小时,单元中的应变就接近于常量。
所以选取的位移模式就必须反应这一点,由第一章可知线性位移项就是提供常应变的。
单元的位移模式满足了上述两个条件者,称为完备单元。
3、位移模式必须能保证单元之间位移的连续性。
在连续弹性体中位移是连续的,所以分割成许多单元后,相邻单元的位移必须保持连续,这就要使相邻单元的公共边界具有相同的位移,以避免发生两相邻单元互相脱离或互相位侵入的现象。
这种连续性在有的文献中称为协调性或相容性。
现在具体分析几种单元的位移模式。
图4—1表示两个相邻的三节点三角形单元,其公共节点『及m的位移对两个单元是一样,由于三节点三角形单元的位移模式是坐标的线性函数,公共边用M 在变形后仍是一条直线,所以上述两个相邻单元在iM边上的任意一点都具有相同位移,从而保证了连续性。
图4—2表示两个相邻矩形单元,其公共边界是M M,相当于y=常数的一条直线,由表4—l可知矩形单元的位移模式是,当y=常数,位移分量M是按线性变化的,所以和前例同样的推理,可以证明两个相邻矩形单元的位移在公共边界上是连续的。
对于六节点的三角形单元及八节点的矩形单元,在单元边界上位移分量是按抛物线变化的,而每条公共边界上有三个公共节点,正好可以保证相邻两单元位移的连续性。
§5-5数值积分1、问题的提出在上一节中对等参元进行单元分析时要进行下列积分: (i) 单元刚度矩阵(ii)体积力的等效结点力(iii)边界力的等效结点力(iv)温升载荷的等效结点力式(5-4-5)~(5-4-8)分别归结为计算以下两种形式的积分对于上述积分仅在单元的形状十分规则的情况下才能得到解析的结果(精确值),一般情况只能用数值积分方法(主要是高斯求积法)求近似值。
虽然数值积分是“被迫“采用的,但后来发现:有选择地控制积分点的个数和位置,可以方便地实现我们的某些特殊意图。
这样一来,数值积分就成为有限元分析的一个重要组成部分,以至本来可以精确积分的三角形单元也常常采用数值积分。
2、数值积分的基本概念任何积分工作取决于三个要素:给定的积分区间,给定的被积函数,具体的积分方法。
下面以一维情况为例介绍数值积分的基本概念 (i) 梯形法函数()x f 在区间(a,b)的积分可以表达为 ()()ini ibax f W dx x f I ∑⎰=≈=1⎰⎰⎰---111111),()(dxdxy x f dx x f 、 [][][][][][][]ηξd d J t B E B tdxdyB E B k T Te det 1111⎰⎰⎰⎰--=={}[][]ηξσd d J t f f N td f f N r y xT y x T eV det 1111⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧=⎰⎰⎰⎰--{}[]{}ηξσγd Jd t B T det 01111T ⎰⎰--={}[]()()⎪⎪⎭⎫ ⎝⎛=⎭⎬⎫⎩⎨⎧=⎰⎰⎰--dy y f dx x f tds q p N r T 1111,ΓΓ(5-4-5)(5-4-8) (5-4-7) (5-4-6)i W :权系数;i x :积分样点;()i x f :积分样点的函数值。
梯形法的求积公式为其中,1--=n ab h ,而a b W ni i -=∑=1(ii) 当被积函数为n-1次多项式P n-1(x )时,则由n 个样点及其样点值(x i , P n-1(x i ),i=1,n )可以精确重构这个多项式,从而可以得到精确解。