自适应渐消卡尔曼滤波在高炉冷却壁微小水温差监测中的应用
- 格式:docx
- 大小:30.12 KB
- 文档页数:4

安徽工业大学科技成果——基于无线工业网的高炉冷却壁高精度水温差及热负荷监测系统成果简介
高炉炼铁是钢铁生产中的重要环节,占据炼铁的主导地位。
本项目将物联网、电子信息技术的最新进展引入高炉炼铁领域,对于传统工业的现代化改造、节能环保、安全质量、发展绿色经济等方面具有至关重要的作用。
基于zigbee、无线HART等多种无线通信协议的工业无线网技术将为冶金行业节约大量昂贵的金属电缆,不仅降低了系统的直接成本,也降低了整个产业链中对于能源、金属材料的消耗。
本项目创新性地提出了采用无线传感网络技术的高精度高炉冷却壁循环水温差及热负荷检测系统的解决方案。
其中包括无线传感网络、基于Pt1000的高精度温度变送、热插轮询、高可靠性设计、液晶及报警显示等一系列创新技术。
成熟程度和所需建设条件
本项目成功应用于马钢三铁两座4000立方米高炉和马鞍山圣戈班管道股份有限公司,经济和社会效益明显。
技术指标
高精度检测仪器精度为0.01摄氏度,为目前国内最高。
市场分析和应用前景
本项目以马钢、宝钢、首钢等冶金行业龙头企业为切入点,面向全国冶金行业,力争树立立环保冶金、绿色冶金、智能冶金的概念。
项目组针对实际生产中的一些关键技术问题已作了较长时间的预研,具备了一定的产业化基础。
社会经济效益分析
项目实施以来,取得了良好的口碑与较好的经济、社会效益。
知识产权及成果获奖情况
已申报1项发明专利,同时拟再申报一项发明专利,多项实用新型。
合作方式合作开发、受托开发。
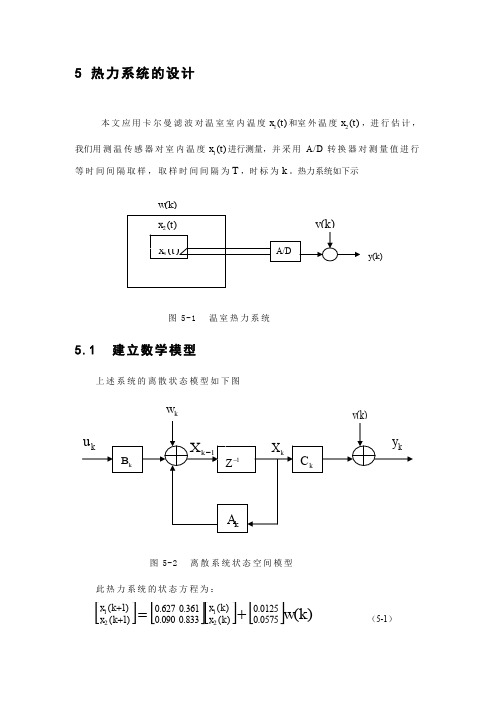
5 热力系统的设计本文应用卡尔曼滤波对温室室内温度)(1t x 和室外温度)(2t x ,进行估计,我们用测温传感器对室内温度)(1t x 进行测量,并采用A/D 转换器对测量值进行等时间间隔取样,取样时间间隔为T ,时标为k 。
热力系统如下示图5-1 温室热力系统5.1 建立数学模型上述系统的离散状态模型如下图图5-2 离散系统状态空间模型此热力系统的状态方程为:[][][][])(0125.00575.0)()(0.361 627.0833.0 090.0)1()1(1212k w k x k x k x k x +=++ (5-1)量测方程为:[])1(]0 1[)1()1()1(12++=+++k v k y k x k x (5-2)上二式中:)(k w 是因环境温度随机变化而产生的过程噪声;)1(+k v 是在测量过程中引入的量测噪声。
当k 变化时,他们将构成两个互不相关的白噪声。
当k 变化时,它们将构成两个互不相关的白噪声序列{)(k w }和{)(k v },其方差分别为:[]9)(2=k w E[]2.0)(2=k v E我们可根据此求出过程噪声和量测噪声的协方差矩阵[][][][]⎥⎦⎤⎢⎣⎡⨯⨯=2222)(0575.0)(0125.00575.0)(0575.00125.0)(0125.0k w E k w E k w E k w E Q 2.0=R5.2 状态观测器的设计由于本文中的系统方程和量测方程的形式是 )()()1(k w k Ax k x +=+ )1()1()1(+++=+k v k Cx k y 而不是)1()1()(-+-=k w k Ax k x)()()(k v k Cx k y +=故为使时标k 的取法一致,卡尔曼滤波器的递推公式可写成如下⎥⎦⎤⎢⎣⎡-+++=+∧∧∧)()1()1()()1(k x CA k y k K k x A k x (5-3)[]111)1()1()1()1(-++++=+k R C k CP C k P k K TT (5-4))()()1(1k Q A k AP k P T +=+ (5-5))1()1()1()1(11++-+=+k CP k K k P k P (5-6)图5-3 状态观测图5.3 卡尔曼滤波器的初始值叠代若假定我们已经知道k =0时内外室的初始温度 ⎥⎦⎤⎢⎣⎡=2520)0(x 则0)0(1=P ,0)0(=K ,0)0(=P利用(5-5)式,可得Q A AP P T+=)0()1(1Q =⎥⎦⎤⎢⎣⎡=0298.00065.00065.00014.0利用(5-4)式,可得[]111)1()1()1(-+=RC CP C P K TT []12.0010298.00065.00065.00014.001010298.00065.00065.00014.0-⎭⎬⎫⎩⎨⎧+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡= ⎥⎦⎤⎢⎣⎡=0323.00069.0 再利用(5-6)式,可得)1()1()1()1(11CP K P P -=[]⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡=0298.00065.00065.00014.0010323.00069.00298.00065.00065.00014.0 ⎥⎦⎤⎢⎣⎡=0298.00064.00064.00014.0 若将上述递推过程继续进行下去,我们即可依次求出k =1~10时)(1k P 、)(k K 、)(k P 值。

Kalman滤波在测量数据处理中的应用研究王延国;王胜利;孙善一;姜楠;刘洋【摘要】论述了Kalman滤波在测量数据处理与分析中的可行性,推导出与在测量中应用相当广泛的最小二乘法关系,进一步导出Kalman滤波动态模型。
并通过对算例进行计算、分析,取得可靠结果,从而验证了Kalman滤波方程在测量数据处理中的有效性、实用性。
%This paper discusses the feasibility of the Kalman Filter in the measurement data processing and analysis,and derives a relationship with the least squares method widely used in the measurement as well as Kalman filter dynamic model.Examples are calculated and analysed.The examples are reliable,thus verifying the effectiveness and practicality of the Kalman filter in the measurement data processing.【期刊名称】《北京测绘》【年(卷),期】2012(000)006【总页数】5页(P1-5)【关键词】Kalman滤波;数据处理;平差【作者】王延国;王胜利;孙善一;姜楠;刘洋【作者单位】安徽理工大学测绘学院,安徽淮南232001;东南大学仪器科学与工程学院,江苏南京210000;安徽理工大学测绘学院,安徽淮南232001;安徽理工大学测绘学院,安徽淮南232001;吉林师范大学计算机学院,吉林四平136000【正文语种】中文【中图分类】P207Kalman滤波原理是一种能对动态系统进行数据处理的有效方法,利用观测向量对随时间不断变化的状态向量进行估计,从估计的角度来说,属于“状态”估计问题。

高炉炉壁冷却效果与水流量间关系的实验研究
吴连卿;张西和;刘燕春
【期刊名称】《安徽工业大学学报(自然科学版)》
【年(卷),期】2006(023)004
【摘要】冷却方式(冷却壁结构)及冷却水流量和温度与冷却效果之间的关系一直是模糊的.通过实验揭示冷却水流量与高炉炉壁冷却效果间的关系.
【总页数】3页(P377-378,393)
【作者】吴连卿;张西和;刘燕春
【作者单位】安徽工业大学,冶金与资源学院,安徽,马鞍山,243002;安徽工业大学,冶金与资源学院,安徽,马鞍山,243002;安徽工业大学,冶金与资源学院,安徽,马鞍山,243002
【正文语种】中文
【中图分类】TF531
【相关文献】
1.高炉本体冷却水流量计显示异常及改进措施 [J], 梁昭湖
2.基于TDC-GP2的高炉冷却水流量的测量设计 [J], 江杰;罗长海
3.冷却水流量对ORC系统性能影响的实验研究 [J], 吴玉庭;赵英昆;雷标;孟庆鹏;陈如梦;智瑞平;马重芳
4.高炉冷却壁冷却水管内液固两相流强化传热实验研究 [J], 张琳;卜庆选;尤一匡;胡爱萍
5.长期稳定高炉内形的炉壁砖与冷却壁一体化的开发 [J], 伊藤史生;朱秉辰
因版权原因,仅展示原文概要,查看原文内容请购买。

阻止自适应Kalman滤波发散的补救方法
张汉国;张洪钺
【期刊名称】《控制与决策》
【年(卷),期】1991(6)1
【摘要】本文讨论一种自适应Kalman滤波的数值不稳定性,指出在滤波发散时噪声协方差估计的异常现象,并给出了两种阻止自适应Kalman滤波发散的补救方法。
仿真结果证明了所述方法的有效性。
【总页数】5页(P53-56)
【关键词】Kalman滤波;滤波;自适应;滤波器
【作者】张汉国;张洪钺
【作者单位】北京航空航天大学自动控制系
【正文语种】中文
【中图分类】TN713
【相关文献】
1.控制Kalman滤波器发散的方法研究 [J], 徐景硕;秦永元;顾冬晴
2.抑制 Kalman 滤波发散的方法及其进展 [J], 胡致强;祖玉杰;徐善勇;
3.一种Kalman滤波发散的克服方法 [J], 吴东生;余启刚
4.Kalman滤波的发散现象及其克服方法 [J], 吴东生;蔡品璐
5.基于GA-BPNN的自适应抗野值无迹Kalman滤波方法 [J], 左益宏;王远亮;何
红丽;葛泉波
因版权原因,仅展示原文概要,查看原文内容请购买。

卡尔曼滤波测温度的简单理解【中英文版】Title: Understanding Temperature Measurement with Kalman Filter Title: 对卡尔曼滤波测温度的简单理解Kalman filtering is a mathematical technique used to filter and predict a signal"s value in the presence of noise.It is widely used in various fields such as signal processing, control systems, and data fusion.When it comes to temperature measurement, the Kalman filter can be used to estimate the temperature of a system accurately by combining noisy measurements with a model of the system"s dynamics.卡尔曼滤波是一种数学方法,用于在噪声存在的情况下滤波和预测信号的值。
它广泛应用于信号处理、控制系统和大数据融合等领域。
在温度测量方面,卡尔曼滤波可以通过结合噪声测量和系统动态模型来准确估计系统的温度。
The Kalman filter works by predicting the signal"s value based on the previous estimate and then correcting this prediction with the latest measurement.This process is repeated continuously to provide the most accurate estimate of the signal"s value.In the case of temperature measurement, the Kalman filter takes into account the time delay and other factors that can affect the accuracy of the measurement.卡尔曼滤波通过基于先前估计预测信号的值,然后用最新的测量值纠正这个预测。
基于自适应渐消Sage-Husa扩展卡尔曼滤波的协同定位算法周萌萌;张冰;赵强;潘梦婷;左思雨【期刊名称】《中国舰船研究》【年(卷),期】2022(17)4【摘要】[目的]针对多自主水下航行器(AUV)在航行过程中的定位精度等问题,提出一种基于自适应渐消Sage-Husa扩展卡尔曼滤波的多AUV协同定位算法。
[方法]首先,改进滤波算法中的自适应滤波器,由渐消记忆指数加权得到新息协方差估计值,并引入渐消因子修正预测误差协方差,以达到调节滤波增益的目的。
然后,建立多AUV协同导航模型,得到基本的协同导航滤波过程,通过对速度、加速度及位置信息的融合,实现对跟随AUV位置状态的准确估计。
最后,采用此算法与EM-EKF,EKF算法分别对AUV协同导航模型进行仿真,并对结果进行对比。
[结果]结果表明,在噪声协方差不匹配时,所提算法与EM-EKF,EKF算法相比均方根误差(RMSE)分别减少17.82%和24.48%,平均定位误差分别减少17.87%和22.54%;在噪声协方差时变时,RMSE分别减少42.11%和51.23%,平均定位误差分别减少34.87%和46.90%。
[结论]所提算法有效改善了滤波的可靠性、精确性和自适应性。
【总页数】6页(P92-97)【作者】周萌萌;张冰;赵强;潘梦婷;左思雨【作者单位】江苏科技大学电子信息学院【正文语种】中文【中图分类】U666.11【相关文献】1.基于改进的Sage-Husa自适应扩展卡尔曼滤波的车辆状态估计2.新的自适应渐消扩展卡尔曼滤波在GPS定位中的应用3.WiFi与惯导融合的渐消因子扩展卡尔曼滤波实时定位算法4.基于GPS/INS组合导航的改进自适应渐消卡尔曼滤波算法5.基于协同定位和自适应卡尔曼滤波的定位算法研究--以煤矿井下人员定位算法为例因版权原因,仅展示原文概要,查看原文内容请购买。
窗口变化的自适应卡尔曼滤波-概述说明以及解释1.引言1.1 概述概述部分的内容如下:在科学和工程领域中,窗口变化和自适应卡尔曼滤波是非常重要的概念和技术。
窗口变化是指在时间序列或数据流中,数据的分布和特征随着时间不断变化的现象。
随着技术的不断进步和应用领域的拓展,越来越多的数据具有窗口变化的特性,例如金融市场的波动、气象系统的变化等。
自适应卡尔曼滤波是一种最优估计方法,用于根据已知的系统模型和观测数据,对系统的状态进行估计和预测。
它能够根据实时的观测数据调整滤波器的参数,以适应窗口变化,从而提高滤波器的性能和鲁棒性。
本文将详细介绍窗口变化的背景及其在实际应用中的意义,以及自适应卡尔曼滤波的原理和优势。
通过深入理解和掌握这些概念和方法,我们可以更好地应对窗口变化的数据和信号,提升我们对系统状态的估计和预测能力。
在接下来的章节中,我们将首先介绍窗口变化的背景,包括窗口变化的概念、主要特征及其在不同领域中的应用。
然后,我们将详细介绍自适应卡尔曼滤波的原理,包括卡尔曼滤波的基本思想、数学模型和算法。
最后,我们将总结窗口变化的应用前景和自适应卡尔曼滤波的优势,展望它们在未来科学和工程领域的发展和应用潜力。
通过本文的阅读,读者将能够全面了解窗口变化和自适应卡尔曼滤波的重要性和实用性,以及它们在各个领域中的应用前景和潜在挑战。
同时,本文还将为读者提供相关研究和应用的参考资料,帮助读者深入学习和应用这些技术,为实际问题的解决提供有效的工具和方法。
1.2文章结构文章结构部分的内容可以按照以下方式编写:文章结构部分应该对整篇文章的结构和组织进行介绍,帮助读者了解文章的组成部分和各个部分的内容。
本文共分为引言、正文和结论三部分。
首先是引言部分,介绍了整篇文章的背景和目的。
引言部分主要包括三个小节:概述、文章结构和目的。
概述部分可以简要介绍窗口变化的问题和自适应卡尔曼滤波的应用。
文章结构部分则用来介绍整篇文章的组织结构和各个部分的内容。
一种纯方位跟踪中的自适应滤波算法
卢晓林;刘健;刘忠
【期刊名称】《海军工程大学学报》
【年(卷),期】2007(019)001
【摘要】针对纯方位被动目标跟踪中扩展卡尔曼滤波算法易发散的不足,提出了一种自适应的改进算法.该算法利用极大后验噪声估计器Sage-Husa对虚拟观测噪声进行实时在线估计,动态补偿线性化带来的误差.算法的对比仿真分析结果表
明,AEKF较之EKF滤波效果有所改善,增强了稳定性,提高了精度,为水下纯方位被动目标跟踪的实现提供一种新的方法.
【总页数】5页(P86-89,98)
【作者】卢晓林;刘健;刘忠
【作者单位】海军工程大学,训练部,武汉,430033;海军92823部队,海南,三
亚,572021;海军工程大学,电子工程学院,武汉,430033
【正文语种】中文
【中图分类】TN911
【相关文献】
1.一种纯方位跟踪中的在线式伪线性算法 [J], 薛锋;刘健;刘忠
2.一种改进的自适应滤波算法在微震信号处理中的实现 [J], 李梁;庹先国;李怀良;刘明哲
3.一种单站纯方位跟踪中的非线性最小二乘方法 [J], 穆晓斌
4.一种新的鲁棒自适应滤波算法在空管自动化系统中的应用与改进 [J], 柴昱
5.一种盲信号处理中的时域自适应滤波算法 [J], 冯平兴
因版权原因,仅展示原文概要,查看原文内容请购买。
一种色噪声下的自适应Kalman跟踪滤波器
孙强;惠晓滨;黄鹤
【期刊名称】《火力与指挥控制》
【年(卷),期】2011(036)003
【摘要】有色噪声干扰情况下非线性系统的状态估计是许多实际工程需要解决的问题.该文章针对传统Kalman滤波器噪声统计特性未知时,受色噪声的影响精度严重降低,甚至出现发散等现象,设计了一种基于神经模糊网络的自适应的Kalman滤波跟踪器.该滤波器通过利用神经模糊网络作为误差估计器,估计出Kalman滤波器的估计误差,从而对Kalman滤波跟踪器的预测结果进行修正,得到更优的预测值.计算机仿真结果表明,该算法可以克服传统算法的局限性,有效地防止滤波器发散,缩小实际的滤波误差,提高滤波精度,实现对跟踪结果的在线改进.
【总页数】3页(P49-51)
【作者】孙强;惠晓滨;黄鹤
【作者单位】空军工程大学,陕西,西安,710038;空军装备部,北京,100843;空军工程大学,陕西,西安,710038;西北工业大学,陕西,西安,710072
【正文语种】中文
【中图分类】TP391
【相关文献】
1.一种空间色噪声环境下的鲁棒自适应波束 [J], 林静然;彭启琮;邵怀宗;居太亮
2.一种抗野值的Kalman跟踪滤波器 [J], 黄鹤;张会生;黄莺;惠晓滨;许家栋
3.色噪声环境下基于约束Kalman波束形成算法 [J], 王伟;雷舒杰;于海洋;孙常善
4.含有有色噪声的自适应Kalman滤波 [J], 刘国庆
5.加性复合有色噪声干扰下的强跟踪滤波器 [J], 柯晶;钱积新
因版权原因,仅展示原文概要,查看原文内容请购买。
自适应渐消卡尔曼滤波在高炉冷却壁微小水温差监测中的应用摘要:介绍了一种运用于高炉冷却壁温差检测的方法,讨论了在工业现场温差检测中存在的干扰源,运用自适应渐消滤波对数据进行实时处理,通过渐消因子增大新数据的权重,减少历史数据的影响从而避免滤波发散。
通过和传统的卡尔曼滤波比较后发现自适应渐消滤波具有较快的反应力,能够更快速、实时的处理动态数据,更适合用于高炉冷却壁微小水温差系统来剔除噪声。
关键词:Kalman滤波;渐消因子;高炉;微小水温差Application of Adaptive Fading Kalman Filter in Temperature Difference Monitoring of Minor Water in Blast Furnace Cooling WallYE Fei(School of Electrical and Information Engineering, Anhui University Of Technology, MaAnshan 243000, China)Abstract:This paper introduces a method for temperature difference detection in cooling staves of blast furnaces, discusses the sources of interference in the detectionof temperatu-re differences at the industrial site, uses adaptive fading filtering to process the data in re-al time, and increases the weight of new data through the fading factor. Reduce the impa-ct of historical data to avoid filter divergence. Compared with the traditional Kalman filte-r, it is found that the adaptive fading filter has a faster response, can handle the dynamic data more quickly and in real time, and is more suitable for the noise removal system of blast furnace cooling stave to remove the noise.Key words: Kalman filter; fading factor; blast furnace; tiny water temperature difference引言安全生产是企业建设的重要保障,在炼铁行业中,高炉的安全生产更是一切工作的前提。
如果能够对高炉炉内的侵蚀状况以及冷却壁的热负荷进行监测就能够提前采取相应措施来吸收炉壁热量降低热负荷,从而最大限度避免事故的发生。
目前冷却壁进出口水温差是分析炉内热负荷以及侵蚀状况的重要参数。
高炉现场环境复杂,数据的采集以及传输都会遇到很多干扰,这些干扰主要有两个来源:(1)冷却壁内软水会有少量脱落的杂质以及气泡;(2)现场的大型设备会产生电磁干扰。
并且采集到的数值本身也带有随机噪声。
这些噪声都会对后续热负荷以及侵蚀状况的分析产生极大的影响,对此本文引入了自适应卡尔曼滤波[1-3],对数据进行实时处理,剔除数据中的噪声,常规的卡尔曼滤波具有无限增长的记忆特性,其结果是根据先前所测得的所有量测数据的加权平均值,所以在一般的要求滤波器具有较快的动态处理系统中,当系统达到稳态后精度会降低[4]。
自适应渐消滤波把由系统模型或者噪声参数不准引起的误差等效为滤波估计误差,引入渐消因子λ增大估计均方误差阵,从而增大滤波增益矩阵,由此增大新的量测数据的作用来抑制滤波发散。
1微小水温差系统本系统的温度采集主要由无线测温节点完成,无线测温节点中主要包含CC1110无线收发芯片,比率双电桥电路,AD转换模块和电源模块。
其中比率双电桥电路由传统的单电桥电路改进而来,旨在提高温度转换的精度;AD转换模块包含16位的AD转换芯片AD7798和一系列外围电路;电源模块主要由单节柱形锂离子可充电电池构成,利用REG711-33进行电压转换。
图中传感器选用的是Pt1000温度传感器,系统利用比率电桥电路将传感器的阻值信号转换成电压信号并且对电压信号进行放大和去噪处理,然后通过AD7798芯片将电压信号转换成相应的AD值并用多项式对温度转换进行拟合从而实现温度检测[5]。
2标准卡尔曼滤波卡尔曼滤波是由美国数学家R.E.Kalman于20世纪60年代初提出的一种递推滤波算法。
卡尔曼滤波是用一组状态预测方程和实际量测方程来描述线性系统,不需要保存历史观测数据,当有新的观测数据到来会根据新数据和前一时刻的数据估计量通过递推运算出新的估计量,并且估计均方差最小。
图1 无线测温节点硬件框图状态方程和量测方程如下:式中xk和Zk分别是k时刻的状态向量和量测向量;ωk和zk是k时刻的状态噪声和量测噪声,他们的均值为零;Φk是状态转移矩阵;Гk和Hk分别是k时刻的噪声驱动矩阵和量测阵。
量测更新过程如下:P(k/k-1)是由k-1时刻求得的噪声协方差矩阵; Kk是k时刻的增益矩阵,由于观察值z和状态值x的维数可能不同, Kk还可以将残差的表现形式由观察域转换为状态域。
当给定状态向量的初值x0和初始噪声协方差矩阵P0后就可以求得增益矩阵Kk,进而求得k时刻估计值xk并且更新Pk供下一轮迭代使用。
由此上述计算步骤可以总结为,先根据前一时刻维数的估计值通过状态预测模型计算出一个原始的预测值,然后由当前时刻的量测值通过状态更新公式对原始预测值进行修正得出最优估计并且更新噪声分布。
3自适应渐消卡尔曼滤波理论上,在经过更多的量测数据处理后,卡尔曼滤波应当给出最佳的状态估计,但是,标准卡尔曼滤波的鲁棒性较差,在实际应用时会出现由模型得到的状态估计与真实状态误差很大的情况,这就是发散现象。
造成这类发散现象的原因主要由以下两点:⑴对所研究的系统了解不够,所建立的数学模型并不能够恰当的描述该系统。
或者是所建立的数学模型太过复杂,在简化数学模型时带来了不确定性[6]。
⑵选取的动态噪声和量测噪声不当。
为了解决这类发散现象本文选用自适应渐消卡尔曼滤波,自适应渐消滤波是利用量测数据进行滤波的同时由滤波自身判断目标动态是否有变化,并且决定是否对系统模型进行修正。
常规的卡尔曼滤波在求的滤波时用到了所有的量测值Zk,…,Zk,当k增大时模型所使用的量测值也随之增大,但是由于系统模型本身不精确,或者系统本身发生变化使得最近取得的数据比起之前的数据更能够真实反映系统的状态,自适应渐消卡尔曼滤波用遗忘因子来增大新的量测数据的作用并且减少“过老”的量测数据的影响[7]。
在原有的卡尔曼滤波基础上用式(7)代替式(3):(7)λ(k)≥1为渐消因子,式(1)~(2),式(7)及式(4)~(6)即是自适应渐消卡尔曼滤波的所有公式。
4渐消遗传因子λ的选取实测残差序列:(8)zk为白噪声列,其协方差阵为:(9)在工业应用中,可以通过预报残差来计算检测量,如果滤波发散则根据计算结果对遗传因子λ的值进行重新估计,相反,如果滤波结果正常则按照一般滤波估计。
通常判断滤波是否发散的依据[8-9]为:(10)式中:γ是储备系数,一般为经验值。
zTkzk由量测数据得出。
由式(10)可知γ是判定滤波是否发散的重要组成,当γ =1时,zTkzk= trace[E(zkzTk)]是最严格的收敛判据[10]。
而在工业现场,考虑到环境的复杂性,很难得出一个精确的适用本系统的储备系数,所以可以使用最严厉的收敛判定条件来计算遗传因子,如果是应用于其他可以根据重复试验得出准确储备系数的系统,此时可以认定储备系数已知,运用式(10)来计算渐消因子。
因为本文中的系统现场环境复杂,所以假设未知并采用严格的收敛判据,已知式(11):整理后可得式(12):(12)5 实验结果分析为了较为全面的比较分析常规的卡尔曼滤波和基于渐消因子的卡尔曼滤波的特点,本实验分别在系统处于动态和稳态下以同一采样频率收集得一组高炉冷却壁的数据,并且用两种滤波器对比实验。
图2 仿真结果在工业现场,当高炉热负荷发生变化时,其冷却壁热负荷也随之变化,表现为冷却水温度突变,此时系统处于动态条件下,根据图(2)可以看出蓝色曲线的自适应渐消卡尔曼滤波器在应对突发情况会表现出更加突出的调节能力[11-12]。
在大部分情况下高炉冷却壁的温度变化只与冷却水源自身的变化和冷却水流经炉壁带走的热负荷量多少相关,这种温度变化可以将系统近似看成处于稳态,传统卡尔曼滤波和自适应渐消卡尔曼滤波的性能接近。
由于常规的卡尔曼滤波具有无限增长的记忆特性,此时的估计值依旧是对先前所有数据的加权平均值,所以滤波器的精度下降。
因此,自适应渐消卡尔曼滤波针对温度数据会发生较大幅度波动的高炉冷却壁水温差系统能够更好的抑制滤波发散并改善滤波器的精度。
参考文献[1]Geng Y, Wang J. Adaptive estimation of multiple fading factors in Kalman filterfor navigation applications[J]. Gps Solutions, 2008, 12(4):273-279.[2]Xia Q, Rao M, Ying Y, et al. Adaptive fading Kalman filter with an application[J]. Automatica, 1994, 30(8):1333-1338.[3]Gao W, Miao L, Maolin N I. Multiple Fading Factors Kalman Filter for SINS Static Alignment Application[J]. 中国航空学报(英文版), 2011, 24(4):476-483.[4]闫玉强,王坚,王春亮.卡尔曼滤波在桥梁变形监测中的应用[J].科技信息,2011(07):10+16.[5]王怀. 基于ARM的高炉冷却壁微小水温差高精度无线监测系统[D].安徽工业大学,2017.[6]杨永建,樊晓光,王晟达,禚真福,徐洋.基于修正卡尔曼滤波的目标跟踪[J].系统工程与电子技术,2014,36(05):846-851.[7]夏启军,孙优贤,周春晖.渐消卡尔曼滤波器的最佳自适应算法及其应用[J].自动化学报,1990(03):210-216.[8] Kalman R E, Bucy R S. New Results in Linear Filtering and Prediction Theory[J]. J.basic Eng.asme Trans.ser.d, 1961, 83(83):109.[9]库索夫可夫H T. 控制系统的最优滤波和辨识方法[M]. 章燕申, 译. 北京: 国防工业出版社, 1984. 166-202.[10]孙章国,钱峰.一种基于指数渐消因子的自适应卡尔曼滤波算法[J].电子测量技术,2010,33(01):40-42.[11]高伟,李敬春,奔粤阳,杨晓龙.基于多重渐消因子的自适应卡尔曼滤波器[J].系统工程与电子技术,2014,36(07):1405-1409.[12]徐韩,曾超,黄清华.一种基于渐消因子的区间卡尔曼滤波器方法[J].武汉大学学报(信息科学版),2017,42(12):1826-1833+1839.作者简介叶飞(1993-12-23),男,汉族,籍贯:江苏台州,学历:硕士,研究方向:嵌入式系统设计。