扩展卡尔曼滤波的影响因素分析_王京伟
- 格式:pdf
- 大小:484.82 KB
- 文档页数:3
扩展卡尔曼滤波调参扩展卡尔曼滤波(Extended Kalman Filter,EKF)是一种常用于非线性系统状态估计的滤波算法。
它是卡尔曼滤波(Kalman Filter,KF)的一种扩展形式,通过在线性化非线性系统来近似估计系统的状态。
本文将重点介绍EKF的调参方法,以帮助读者更好地应用这一滤波算法。
要调参EKF,首先需要了解EKF的基本原理和算法流程。
EKF通过在每个时间步中使用线性化的动力学方程和观测方程,以及通过卡尔曼增益来更新状态估计。
在实际应用中,EKF的性能很大程度上取决于系统模型的准确性和观测数据的质量。
在调参EKF时,下面几个关键参数需要特别关注:1. 系统动力学模型:EKF需要准确的系统动力学模型来进行状态预测。
如果系统模型不准确,将会导致状态估计的偏差。
因此,在调参EKF时,需要特别关注系统模型的准确性,并根据实际情况进行修正和优化。
2. 过程噪声协方差矩阵(Q):过程噪声协方差矩阵描述了系统动力学方程中的噪声。
通过调整Q矩阵的值,可以控制状态预测的不确定性。
一般情况下,Q矩阵的值越大,状态预测的不确定性就越大。
因此,在调参EKF时,需要根据实际情况调整Q矩阵的值,以平衡状态预测的准确性和稳定性。
3. 观测噪声协方差矩阵(R):观测噪声协方差矩阵描述了观测方程中的噪声。
通过调整R矩阵的值,可以控制观测数据的权重。
一般情况下,R矩阵的值越大,观测数据的权重就越小。
因此,在调参EKF时,需要根据实际情况调整R矩阵的值,以平衡观测数据的准确性和稳定性。
4. 初始状态估计和协方差矩阵:EKF需要一个初始的状态估计和协方差矩阵作为起点。
初始状态估计应尽可能接近真实状态,而初始协方差矩阵应尽可能准确地描述状态的不确定性。
在调参EKF时,需要根据实际情况调整初始状态估计和协方差矩阵的值,以提高状态估计的准确性和稳定性。
除了以上几个关键参数外,还有其他一些辅助参数可以辅助调参EKF,如收敛判断条件、迭代次数等。
扩展卡尔曼滤波调参1. 什么是卡尔曼滤波?卡尔曼滤波(Kalman Filter)是一种用于估计系统状态的递归滤波器。
它能够通过融合来自传感器的测量数据和系统模型的预测值,提供对系统状态的最优估计。
卡尔曼滤波器的核心思想是通过不断迭代的方式,根据当前的观测值和先验估计值,计算出最优的后验估计值。
它的优点在于对于线性系统,能够得到最优解,并且具有较低的计算复杂度。
2. 扩展卡尔曼滤波(Extended Kalman Filter,EKF)扩展卡尔曼滤波是卡尔曼滤波的一种扩展,用于非线性系统的状态估计。
与传统的卡尔曼滤波相比,扩展卡尔曼滤波能够通过线性化非线性系统模型,将其转化为线性系统模型,从而实现状态的估计。
在扩展卡尔曼滤波中,通过使用泰勒级数展开,将非线性函数线性化为一阶导数的形式。
然后,使用线性卡尔曼滤波的方法进行状态估计。
这样一来,扩展卡尔曼滤波能够处理一些非线性系统,并提供对系统状态的最优估计。
3. 扩展卡尔曼滤波调参在使用扩展卡尔曼滤波进行状态估计时,需要对滤波器进行一些参数的调整,以获得更好的估计结果。
下面介绍一些常用的调参方法。
3.1 系统模型在使用扩展卡尔曼滤波进行状态估计时,首先需要定义系统的状态方程和观测方程。
系统的状态方程描述了系统状态的演化规律,而观测方程描述了观测值与系统状态之间的关系。
在调参时,需要根据实际情况对系统模型进行调整。
对于非线性系统,可以通过改变状态方程和观测方程的形式,使其更好地与实际系统相匹配。
3.2 过程噪声和观测噪声在卡尔曼滤波中,过程噪声和观测噪声是用来描述系统模型和观测模型中的不确定性的参数。
过程噪声表示系统状态的演化过程中的不确定性,观测噪声表示观测值的不确定性。
在调参时,需要根据实际情况对过程噪声和观测噪声进行调整。
过程噪声和观测噪声的大小与系统的动态特性和传感器的性能有关。
通过调整这两个参数,可以使滤波器更好地适应实际情况。
3.3 初始状态和协方差在卡尔曼滤波中,初始状态和协方差用来表示对系统状态的初始估计。
基于扩展卡尔曼滤波器的交流永磁同步电机参数辨识的开题报告一、选题背景及意义交流永磁同步电机(PMSM)具有结构简单、质量轻、体积小、效率高、起动与调速性能优越等特点,已被广泛应用于电力、工业、交通等领域。
PMSM的参数辨识问题一直是电机控制领域研究的热点问题之一。
精确的参数辨识可以大大提高PMSM控制系统的性能和效率。
传统的基于最小二乘法的PMSM参数辨识方法依赖于直流和交流侧测量的电量,当输入电流和速度有较大偏差时,容易出现辨识精度较低的情况。
因此,使用基于扩展卡尔曼滤波器(EKF)的PMSM参数辨识方法来获得更准确的参数估计值,已成为一种热门研究方向。
二、研究目标本课题旨在设计一种基于EKF的PMSM参数辨识方法,以获得准确的参数估计值。
研究内容包括以下几个方面:1.建立PMSM的数学模型,包括电压、电流、转速等物理量的方程。
2.设计EKF算法,用于提高参数辨识的准确性。
3.编写MATLAB程序,实现样本数据的采集、处理及EKF算法的实现。
4.通过仿真实验和实际实验验证所设计的基于EKF的PMSM参数辨识方法的有效性和准确性。
三、研究内容1. PMSM的研究与数学模型建立本课题将研究PMSM的结构、特性、运行原理及数学模型。
对PMSM进行建模,通过建立电压、电流、转速等物理量的方程,为后续的参数辨识提供数学基础。
2. EKF算法的设计与实现将EKF算法应用于PMSM参数辨识过程中,可提高参数估计的准确性。
本课题将研究EKF算法的基本原理、实现过程及其在PMSM参数辨识中的应用,实现算法的设计与实现。
3. 样本数据采集和处理本课题将进行样本数据的采集和处理。
采集到的数据将作为基于EKF的PMSM参数辨识的输入,包括电机电流、电压、转速等实时信号。
4. 基于EKF的PMSM参数辨识仿真及实验根据所设计的基于EKF的PMSM参数辨识方法,开展仿真及实验验证。
通过对仿真结果和实验结果的分析,验证研究成果的有效性和准确性。
扩展Kalman滤波算法原理及应用随着科技的发展,各种传感器和控制系统的应用越来越广泛,很多智能化的设备需要使用滤波算法,提高其精度和鲁棒性。
在滤波算法中,扩展Kalman滤波(EKF)算法是一种非常常用的算法,可以广泛应用于各种工程领域,如自动控制、机器人导航、图像处理等,本文将介绍EKF算法的原理、特点以及应用。
一、Kalman滤波算法简介Kalman滤波算法是一种常用的状态估计算法,具有优秀的滤波效果。
它是由R.E. Kalman于1960年提出的,主要用于随机信号的滤波和估计。
Kalman滤波是一种基于线性系统和高斯噪声模型的最优估计算法。
它通过对样本点之间的关系建立一个能够描述它们在时间上的演变的状态模型,并根据观测值推算出状态量的概率分布,然后利用这个分布,根据Bayes公式进行矫正,得到最终的估计值。
二、扩展Kalman滤波算法原理扩展Kalman滤波算法是对Kalman滤波算法的一种改进,主要应用于非线性系统的估计。
与Kalman滤波相比,EKF基本思想是通过在预测和更新阶段线性化非线性系统模型来解决非线性系统问题。
EKF的步骤如下:1.定义状态变量向量:通过时间t来定义系统状态x(t),包含系统的全部状态信息。
2.建立状态转移方程:利用状态向量和噪声过程,建立状态转移方程,描述系统在各时间点的演变规律。
3.定义观测变量向量:通过时间t来定义系统的观测值Y(t),包含应用于系统的观测传感器的测量信息。
4.建立系统量测方程:通过状态转移方程和状态向量,以及观测传感器测量值,建立系统量测方程。
5.系统预测:预测状态的无偏估计值和方差。
6.状态更新:利用观测数据校正预测状态的无偏估计值和方差。
以上步骤在线性系统中都是可直接实现的,但非线性系统由于噪声,量测误差和模型误差等原因,使得状态转移方程和系统量测方程无法直接用之前的线性方程来解决。
因此,EKF在预测和更新过程中,均采用泰勒展开式对非线性芯片进行线性化处理,通过对状态转移和系统量测方程进行一阶泰勒展开,将非线性函数在某点的值近似为线性函数的值,从而得到线性化的状态转移方程和系统量测方程。
扩展卡尔曼滤波器原理一、引言扩展卡尔曼滤波器(Extended Kalman Filter,EKF)是一种常用的非线性滤波器,其原理是对非线性系统进行线性化处理,从而利用卡尔曼滤波器的优势进行状态估计和滤波。
本文将介绍扩展卡尔曼滤波器的原理及其应用。
二、卡尔曼滤波器简介卡尔曼滤波器是一种基于最优估计理论的滤波算法,广泛应用于估计系统状态。
卡尔曼滤波器通过对系统状态和观测数据进行加权平均,得到对系统状态的估计值。
其基本原理是通过系统的动力学方程和观测方程,利用贝叶斯概率理论计算系统状态的后验概率分布。
三、非线性系统的滤波问题在实际应用中,许多系统都是非线性的,而卡尔曼滤波器是基于线性系统模型的。
因此,当系统模型非线性时,传统的卡尔曼滤波器无法直接应用。
扩展卡尔曼滤波器就是为了解决这个问题而提出的。
四、扩展卡尔曼滤波器原理扩展卡尔曼滤波器通过对非线性系统进行线性化处理,将非线性系统转化为线性系统,然后利用卡尔曼滤波器进行状态估计。
其基本思想是通过一阶泰勒展开将非线性系统进行线性逼近。
具体步骤如下:1. 系统模型线性化:将非线性系统的动力学方程和观测方程在当前状态下进行一阶泰勒展开,得到线性化的系统模型。
2. 预测步骤:利用线性化的系统模型进行状态预测,得到预测的状态和协方差矩阵。
3. 更新步骤:利用观测方程得到的测量值与预测的状态进行比较,计算卡尔曼增益。
然后利用卡尔曼增益对预测的状态和协方差矩阵进行更新,得到最终的状态估计和协方差矩阵。
五、扩展卡尔曼滤波器的应用扩展卡尔曼滤波器广泛应用于各个领域,包括机器人导航、目标跟踪、航天器姿态估计等。
以机器人导航为例,机器人在未知环境中通过传感器获取的信息是非线性的,而机器人的运动模型也是非线性的。
因此,利用扩展卡尔曼滤波器可以对机器人的位置和姿态进行估计,从而实现导航功能。
六、总结扩展卡尔曼滤波器是一种处理非线性系统的滤波算法,通过对非线性系统进行线性化处理,利用卡尔曼滤波器进行状态估计和滤波。
扩展卡尔曼滤波调参
摘要:
1.卡尔曼滤波简介
2.卡尔曼滤波的应用场景
3.卡尔曼滤波的参数调整
4.调参的重要性和方法
5.总结
正文:
【卡尔曼滤波简介】
卡尔曼滤波是一种线性高斯状态空间模型,主要用于估计动态系统的状态变量。
它是一种递归滤波算法,可以对测量数据进行加权平均,并结合系统模型和先验估计来更新状态估计。
卡尔曼滤波具有实时性、鲁棒性和准确性等优点,因此在许多领域都有广泛的应用。
【卡尔曼滤波的应用场景】
卡尔曼滤波在许多领域都有应用,如导航定位、信号处理、机器人控制等。
例如,在导航定位领域,由于全球定位系统(GPS)信号受到多路径效应、大气层延迟等因素的影响,测量数据存在误差。
卡尔曼滤波可以结合GPS 测量数据和惯性导航系统,有效提高定位精度。
【卡尔曼滤波的参数调整】
卡尔曼滤波的效果受到许多参数的影响,如状态转移矩阵、观测矩阵、协方差矩阵等。
为了获得较好的滤波效果,需要对这些参数进行调整。
参数调整
的方法有很多,如最小二乘法、最大似然估计等。
【调参的重要性和方法】
参数调整对于卡尔曼滤波的性能至关重要。
合适的参数可以使滤波器在面临噪声和非线性因素时仍能保持较高的估计精度。
调参的方法有很多,如网格搜索、随机搜索、贝叶斯优化等。
这些方法可以根据不同的问题特点和需求来选择。
【总结】
卡尔曼滤波是一种重要的信号处理技术,具有实时性、鲁棒性和准确性等优点。
在实际应用中,需要对卡尔曼滤波的参数进行调整,以获得较好的滤波效果。
初学者的卡尔曼滤波——扩展卡尔曼滤波(⼀)简介 已经历经了半个世纪的卡尔曼滤波⾄今仍然是研究的热点,相关的⽂章不断被发表。
其中许多⽂章是关于卡尔曼滤波器的新应⽤,但也不乏改善和扩展滤波器算法的研究。
⽽对算法的研究多着重于将卡尔曼滤波应⽤于⾮线性系统。
为什么学界要这么热衷于将卡尔曼滤波器⽤于⾮线性系统呢?因为卡尔曼滤波器从⼀开始就是为线性系统设计的算法,不能⽤于⾮线性系统中。
但是事实上多数系统都是⾮线性的,所以如果卡尔曼滤波器不能⽤在⾮线性系统中的话,那么它的应⽤范围就⾮常有限了。
如果真的是这样,卡尔曼滤波器可能早就寿终正寝或者过很久很久才会被⼈注意到。
幸运的是早期的学者们对这个问题理解的⾮常深刻,⽽且也找到了解决⽅法,就是扩展卡尔曼滤波(EKF)。
事实上世界上的第⼀个卡尔曼滤波也是扩展卡尔曼滤波,⽽不是线性卡尔曼滤波器。
扩展卡尔曼滤波有很久远的历史,如果说有⼀个⾮线性系统需要⽤到卡尔曼滤波的话,不必怀疑,先试试扩展卡尔曼滤波准没错。
因为他有很久远的历史,所以可以轻松的找到许多这⽅⾯的资料。
不过扩展卡尔曼滤波也不是⽆懈可击的,它有⼀个很严重的短板——发散。
使⽤扩展卡尔曼滤波的时候请务必记在⼼上,时刻提醒⾃⼰,这样设计滤波器其结果会发散吗?毫不夸张地说相对于线性卡尔曼滤波设计扩展卡尔曼滤波器的就是在解决发散问题。
发散问题解决了剩下的都是⼩事。
⼩结:扩展卡尔曼滤波器主要⽤于⾮线性系统;扩展卡尔曼滤波器会发散。
线性化的卡尔曼滤波器 在讨论扩展卡尔曼滤波之前,⾸先要了解⼀下线性化卡尔曼滤波。
它和线性卡尔曼滤波器在滤波器的算法⽅⾯有同样的算法结构,⼀样⼀样的。
不⼀样的地⽅在于这两者的系统模型不同。
线性卡尔曼滤波器的系统本⾝就是线性系统,⽽线性化卡尔曼滤波器的系统本⾝是⾮线性系统,但是机智的⼤神们将⾮线性的系统进⾏了线性化,于是卡尔曼滤波就可以⽤在⾮线性系统中了。
对于⼀个卡尔曼滤波器的设计者,就不要去管你的模型到底是⼀开始就是线性系统还是⾮线性系统线性化得到的线性系统,反正只要是线性系统就好了。

imu的扩展卡尔曼滤波IMU的扩展卡尔曼滤波引言:惯性测量单元(IMU)是一种能够测量加速度和角速度的传感器组合。
然而,由于噪声和误差的存在,IMU测量的数据往往会出现漂移等问题,导致精度下降。
为了解决这些问题,研究者们提出了扩展卡尔曼滤波(EKF)算法,用于对IMU数据进行滤波和估计。
一、IMU的工作原理IMU由加速度计和陀螺仪组成。
加速度计可以测量物体在三个方向上的加速度,而陀螺仪则可以测量物体绕三个轴的角速度。
通过积分加速度计的输出和陀螺仪的输出,可以得到物体在空间中的位置和姿态信息。
然而,IMU的测量数据存在噪声和偏差等误差,导致输出的位置和姿态信息不准确。
例如,陀螺仪存在漂移现象,即角速度的累积误差会导致位置和姿态的不断偏移。
因此,需要一种算法来对IMU的测量数据进行滤波和估计,以提高其精度。
二、卡尔曼滤波算法卡尔曼滤波是一种用于估计系统状态的算法,它通过对测量数据和系统模型进行融合,得到对系统状态的最优估计。
卡尔曼滤波算法有两个主要步骤:预测和更新。
预测步骤根据系统的动力学模型和上一时刻的状态估计,预测当前时刻的状态。
更新步骤则根据当前时刻的测量数据和预测的状态,计算出对系统状态的修正。
然而,卡尔曼滤波算法是基于线性系统模型的,而IMU的动力学模型是非线性的,因此无法直接应用。
为了解决这个问题,扩展卡尔曼滤波算法被提出。
三、扩展卡尔曼滤波算法扩展卡尔曼滤波算法是对卡尔曼滤波算法的扩展,用于处理非线性系统模型。
其核心思想是通过线性化的方式近似非线性模型,然后应用卡尔曼滤波算法。
在IMU的应用中,扩展卡尔曼滤波算法可以用于对位置和姿态的估计。
首先,需要建立IMU系统的动力学模型,并根据实际测量数据对其进行校准。
然后,通过预测步骤和更新步骤,对位置和姿态进行估计。
预测步骤中,根据IMU测量的加速度和角速度,以及上一时刻的估计状态,预测当前时刻的状态。
在更新步骤中,利用当前时刻的测量数据和预测的状态,计算出修正后的状态估计值。
扩展卡尔曼滤波原理
扩展卡尔曼滤波原理是一种目前流行的状态估计方法,被广泛应用于机器人、飞行器、汽车等自主导航系统中。
本文将从原理、步骤、思路等方面进行详细解析。
一、原理
扩展卡尔曼滤波是一种非线性滤波器,它是经典卡尔曼滤波在非线性系统中的推广。
经典的卡尔曼滤波仅适用于线性系统,而非线性系统无法用线性方程组完全描述。
扩展卡尔曼滤波通过线性化非线性系统来近似其转移和观测方程,使得经典卡尔曼滤波也能够应用于非线性系统中。
二、步骤
扩展卡尔曼滤波的步骤分为预测和更新两个部分。
1.预测:预测状态的状态估计值和协方差矩阵。
2.更新:更新状态的状态估计值和协方差矩阵。
具体步骤如下:
预测:
(1)计算状态预测值。
(2)计算状态预测协方差矩阵。
(3)计算协方差预测矩阵。
更新:
(1)计算卡尔曼增益。
(2)计算状态更新值。
(3)计算状态更新协方差矩阵。
三、思路
扩展卡尔曼滤波的核心思路是将非线性系统转化为线性系统,以便应
用经典卡尔曼滤波方法。
在扩展卡尔曼滤波中,将非线性系统状态量
和观测量的概率密度函数近似为高斯分布。
如果概率密度函数不是高
斯分布,则需要进行线性化处理。
此外,为了提高滤波的精度,还需
要不断调整模型参数。
总结:
扩展卡尔曼滤波的原理、步骤和思路都非常重要。
在实际使用中,需
要根据具体问题进行参数调整。
扩展卡尔曼滤波与其他滤波算法相比,具有更高的精度,但是算法复杂度较高,需要消耗更多的计算资源。
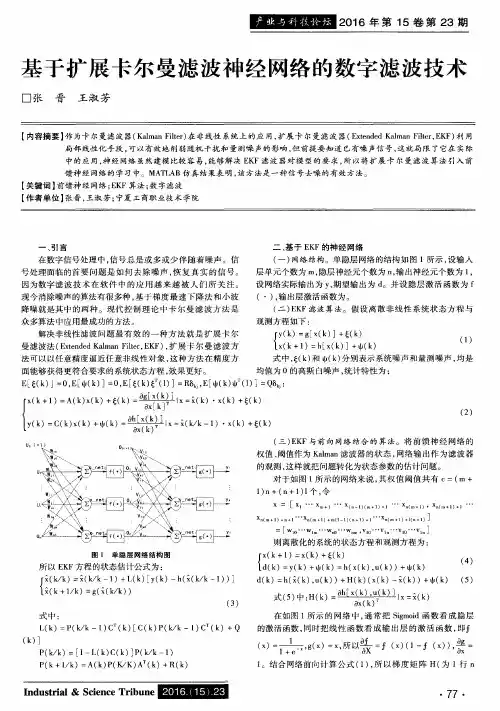
一种改进的扩展卡尔曼滤波作者:李志国李旭明王运锋来源:《现代电子技术》2016年第02期摘要:针对机动目标跟踪中目标发生状态突变和运动模型不匹配时扩展卡尔曼滤波精度降低或发散的问题,提出一种根据新息矩阵的范数判断滤波是否应该修正,并通过修正一步预测值来提高滤波精度的算法。
该算法使用新息矩阵和量测误差矩阵来判断滤波是否稳定,在滤波精度降低甚至发散的情况下通过修正一步预测值来提高滤波精度。
该算法计算量小,实时性强。
仿真结果表明,该算法能够根据新息实时调整,且滤波精度较高。
关键词:扩展卡尔曼滤波;滤波发散;新息;目标跟踪中图分类号: TN911⁃34 文献标识码: A 文章编号: 1004⁃373X(2016)02⁃0009⁃03 An improved extended Kalman filterLI Zhiguo1, LI Xuming2, WANG Yunfeng1(1. College of Computer Science, Sichuan University, Chengdu 610065,China;2. Nanjing Changjiang Electronics Information Industry Group Co., Ltd., Nanjing 210000,China)Abstract: Concerning the problem of low filtering accuracy or filtering divergence of EKF when the system model is established inaccurately and target moving state changes, a new adaptive algorithm is presented, which improves the accuracy and performance by adjusting the predicted value. The algorithm can judge whether the filtering is stable by the innovation matrix and measurement error matrix, and can improve the filtering accuracy by correcting the single⁃step predicted value while the filtering accuracy lowers or even divergence. The proposed algorithm has little computation burden and high real⁃time performance. The simulation results show that the algorithm has high filtering accuracy and is capable of quick adjustment according to the innovation.Keyword: extended Kalman filter; filtering divergence; innovation; target tracking0 引言扩展卡尔曼滤波(Extended Kalman Filter,EKF)主要解决目标跟踪中运动模型是非线性时的问题,通常将非线性系统进行近似线性化后采用标准卡尔曼滤波。