第十三章 步进电动机控制系统PPT课件
- 格式:ppt
- 大小:2.11 MB
- 文档页数:32


第13章步进电动机传动控制系统教学内容13.1 步进电动机13.2 步进电动机的环形分配器13.3 步进电动机的驱动电路13.4 步进电动机的运行特性及选用中应注意的问题教学安排本章安排2个学时,采用多媒体授课。
知识点及其基本要求1.掌握步进电动机步矩角和步进电动机转速的数学表达式及其物理意义;2.掌握步进电动机的结构、运行特性及影响因素。
重点和难点重点掌握步进电动机的通电方式和主要性能指标。
难点步进电动机的矩角特性和矩频特性。
教学设计1.了解步进电动机的结构和工作原理,掌握步进电动机的通电方式和求解步距角与转速的公式。
步进电机是将电脉冲信号转变为角位移或线位移的机电执行元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
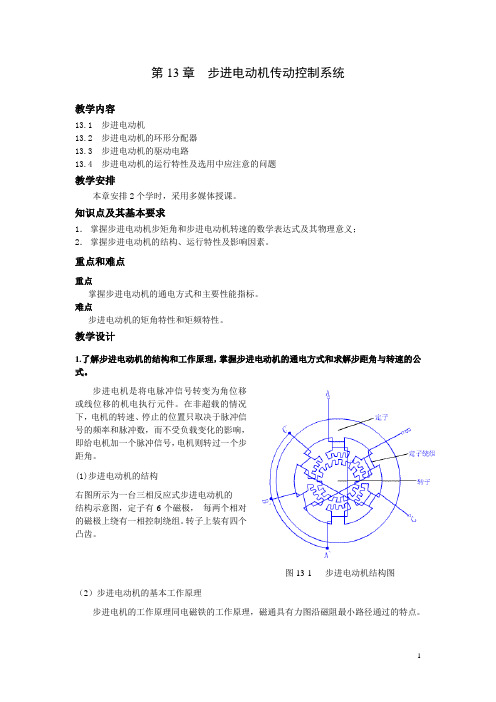
(1)步进电动机的结构右图所示为一台三相反应式步进电动机的结构示意图,定子有6个磁极,每两个相对的磁极上绕有一相控制绕组。
转子上装有四个凸齿。
图13-1 步进电动机结构图(2)步进电动机的基本工作原理步进电机的工作原理同电磁铁的工作原理,磁通具有力图沿磁阻最小路径通过的特点。
图13-2 三相反应式步进电动机的工作原理图通电顺序A-B-C-A,转子便按顺时针方向一步步转动。
每换接一次,转子前进一个步距角。
通电顺序改为A-C-B-A便可反向旋转。
(3)步进电机的通电方式三相单三拍通电顺序:A-B-C-A或A-C-B-A,步距角30度(齿距90度)特点:每次只有一相控制绕组通电吸引转子,易引起在平衡位置振荡,稳定性差,绕组通电换极时易失步。
双三拍通电顺序:AB-BC-CA-AB或反过来,步距角30度(齿距90度)特点:始终有两相通电,感应力矩大,静态误差小,定位精度高,工作稳定,不易失步。
三相六拍通电顺序:A-AB-B-BC-C-CA-A步,距角15度(齿距90度)或A-AB-B-BC-C-CA-A特点:单、双相轮流通电,通电状态增加一倍、步距角减少一半,但具有双三拍的特点。