步进电动机实验
- 格式:doc
- 大小:47.00 KB
- 文档页数:3

实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备1、FX2N-48MR PLC一台2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。
从图中可以看出,它分成转子和定子两部分。
定子是由硅钢片叠成,定子上有六个磁极(大极),每两个相对的磁极(N、S极)组成一对。
共有3对。
每对磁极都绕有同一绕组,也即形成1相,这样三对磁极有3个绕组,形成三相。
可以得出,三相步进电机有3对磁极、3相绕组;四相步进电机有4对磁极、四相绕组,依此类推。
反应式步进电动机的动力来自于电磁力。
在电磁力的作用下,转子被强行推动到最大磁导率(或者最小磁阻)的位置,如图3-1(a)所示,定子小齿与转子小齿对齐的位置,并处于平衡状态。
对三相异步电动机来说,当某一相的磁极处于最大导磁位置时,另外两相相必处于非最大导磁位置,如图3-1(b)所示,即定子小齿与转子小齿不对齐的位置。
把定子小齿与转子小齿对齐的状态称为对齿,把定子小齿与转子小齿不对齐的状态称为错齿。
错齿的存在是步进电机能够旋转的前提条件,所以,在步进电机的结构中必须保证有错齿的存在,也就是说,当某一相处于对齿状态时,其它绕组必须处于错齿状态。
本实验的电机采用两相混合式步进电机,其内部上下是两个磁铁,中间是线圈,通了直流电以后,就成了电磁铁,被上下的磁铁吸引后就产生了偏转。
因为中间连接的电磁铁的两根线不是直接连接的,是采用在转轴的位置用一根滑动的接触片。
这样如果电磁铁转过了头,原先连接电磁铁的两根线刚好就相反了,所以电磁铁的N极S极就和以前相反了。
但是电机上下的磁铁是不变的,所以又可以继续吸引中间的电磁铁。

机械设计制造及其自动化专业实验——机电控制实验步进电机控制技术综合实验————可编程控制器控制滑台的速度、位置实验指导书重庆理工大学重庆汽车学院实践教学及技能培训中心2012年10月学生实验守则1.学生应按照实验教学计划和约定的时间,准时上实验课,不得迟到早退。
2.实验前认真阅读实验指导书,明确实验目的、步骤、原理,预习有关的理论知识,并接受实验教师的提问和检查。
3.进入实验室必须遵守实验室的规章制度。
不得高声喧哗和打闹,不准抽烟、随地吐痰和乱丢杂物。
4.做实验时必须严格遵守仪器设备的操作规程,爱护仪器设备,服从实验教师和技术人员指导。
未经许可不得动用与本实验无关的仪器设备及其它物品。
5.实验中要细心观察,认真记录各种试验数据。
不准敷衍,不准抄袭别组数据,不得擅自离开操作岗位。
6.实验时必须注意安全,防止人身和设备事故的发生。
若出现事故,应立即切断电源,及时向指导教师报告,并保护现场,不得自行处理。
7.实验完毕,应主动清理实验现场。
经指导教师检查仪器设备、工具、材料和实验记录后方可离开。
8.实验后要认真完成实验报告,包括分析结果、处理数据、绘制曲线及图表。
在规定时间内交指导教师批改。
9.在实验过程中,由于不慎造成仪器设备、器皿、工具损坏者,应写出损坏情况报告,并接受检查,由领导根据情况进行处理。
10.凡违反操作规程,擅自动用与本实验无关的仪器设备、私自拆卸仪器而造成事故和损失的,肇事者必须写出书面检查,视情节轻重和认识程度,按学院有关规定予以赔偿。
重庆理工大学说明1.同学可以登录学校的“实验选课系统”(从学校首页登陆:或从数字校园登录),自己进行实验项目的选择。
希望同学们能在每个实验项目开放的时间内尽早进行实验预约(预约时间必须比实验上课时间提前3天),因为学生数量比较多,如果某实验项目开放的时间内同学未能进行实验预约,则错过该实验项目的实验机会,补做就要在该实验项目下一次开放时进行。
2.如有什么问题,同学可以拨打电话62563127联系张君老师。

一、实验目的1. 了解步进电动机的工作原理和驱动方式。
2. 掌握步进电动机的驱动电路设计方法。
3. 熟悉步进电动机的控制程序编写和调试方法。
4. 掌握步进电动机的速度和方向控制方法。
二、实验器材1. 步进电动机一台2. 步进驱动器一台3. 单片机实验板一块4. 电源模块一块5. 连接线若干6. 示波器一台7. 电脑一台三、实验原理步进电动机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是输出角位移与输入脉冲数成正比,转速与脉冲频率成正比。
步进电动机的驱动电路主要由驱动器和控制电路组成。
驱动器负责将单片机输出的脉冲信号转换为步进电动机所需的驱动信号,而控制电路则负责生成步进电动机所需的脉冲信号。
四、实验步骤1. 步进电动机驱动电路设计(1)根据步进电动机的型号和规格,选择合适的驱动器。
(2)设计驱动电路原理图,包括驱动器、单片机、电源模块等。
(3)焊接驱动电路,并检查无误。
2. 步进电动机控制程序编写(1)编写步进电动机控制程序,包括初始化、脉冲生成、速度和方向控制等模块。
(2)通过示波器观察脉冲信号的波形,确保脉冲信号符合步进电动机的要求。
(3)调试程序,确保步进电动机能够按照预期运行。
3. 步进电动机速度和方向控制(1)通过调整脉冲频率控制步进电动机的转速。
(2)通过改变脉冲信号的顺序控制步进电动机的转动方向。
(3)观察步进电动机在不同速度和方向下的运行情况,分析控制效果。
五、实验结果与分析1. 步进电动机驱动电路设计成功,步进电动机能够按照预期运行。
2. 步进电动机控制程序编写成功,能够实现速度和方向控制。
3. 通过调整脉冲频率,步进电动机的转速在0-300转/分钟范围内可调。
4. 通过改变脉冲信号的顺序,步进电动机的转动方向可在正转和反转之间切换。
5. 实验结果表明,步进电动机的速度和方向控制方法可行,控制效果良好。
六、实验总结本次实验成功地实现了步进电动机的驱动电路设计、控制程序编写和速度、方向控制。
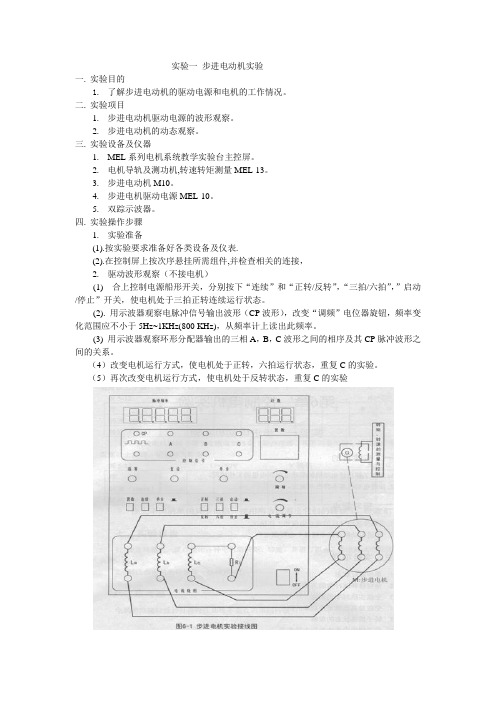
实验一步进电动机实验一.实验目的1.了解步进电动机的驱动电源和电机的工作情况。
二. 实验项目1.步进电动机驱动电源的波形观察。
2.步进电动机的动态观察。
三.实验设备及仪器1.MEL系列电机系统教学实验台主控屏。
2.电机导轨及测功机,转速转矩测量MEL-13。
3.步进电动机M10。
4.步进电机驱动电源MEL-10。
5.双踪示波器。
四.实验操作步骤1.实验准备(1).按实验要求准备好各类设备及仪表.(2).在控制屏上按次序悬挂所需组件,并检查相关的连接,2.驱动波形观察(不接电机)(1) 合上控制电源船形开关,分别按下“连续”和“正转/反转”,“三拍/六拍”,”启动/停止”开关,使电机处于三拍正转连续运行状态。
(2). 用示波器观察电脉冲信号输出波形(CP波形),改变“调频”电位器旋钮,频率变化范围应不小于5Hz~1KHz(800 KHz),从频率计上读出此频率。
(3) 用示波器观察环形分配器输出的三相A,B,C波形之间的相序及其CP脉冲波形之间的关系。
(4)改变电机运行方式,使电机处于正转,六拍运行状态,重复C的实验。
(5)再次改变电机运行方式,使电机处于反转状态,重复C的实验3.步进电机的动态观察:(按图正确接线, 频率40 KHz)(1)单步运行状态:A: 接通电源,按下“单步”琴键开关,“复位”按钮,“清零”按钮。
B: 不断按下“单步”按钮,观察运行状态;改变电机转向,重复操作。
(2).角位移和脉冲数的关系:A:按下“置数”琴键开关,拨动开关预置步数,分别按下“复位”,“清零”按钮,记录电机所出位置。
B:按下“启动/停止”开关,电机运转,观察并记录电机偏转角度。
(20Hz左右)C:重新预置步数,重复观察并记录电机偏转角度。
(3) 空载突跳频率的测定控制系统置连续运行状态,按执行键,电机连续运转后,调节速度调节旋钮使频率提高至某频率(自动指示当前频率)。
按设置键让步进电机停转,再重新启动电机(按执行键),观察电机能否运行正常,如正常,则继续提高频率,直至电机不失步启动的最高频率,则该频率为步进电机的空载突跳频率。

方向信号 (a) 脉冲+方向 (b) 正脉冲+负脉冲 实验五 步进电机单轴定位控制实验一、实验目的1. 学习和掌握步进电机及其驱动器的操作和使用方法;2. 学习和掌握步进电机单轴定位控制方法;3.学习和掌握PLC 单轴定位模块的基本使用方法。
二、实验原理步进电动机是一种将电脉冲信号转换为相应的角位移或直线位移量的机电执行元件,即步进电动机输入的是电脉冲信号,输出的是角位移或直线位置。
每给一个脉冲,步进电动机转动一个角度,这个角度称为步距角。
运动速度正比于脉冲频率,角位移正比于脉冲个数。
步进电动机典型控制系统框图如图1-2-9所示。
图1-2-9 步进电动机典型控制系统框图位置控制单元可根据需要的频率和个数以及设定的加减时间控制步进电动机运动。
由于步进电动机需要正反转运动,因此定位单元的输出脉冲形式有“脉冲+方向”和“正脉冲+负脉冲”两种,它们均可控制步进电动机正反转运动。
输出脉冲形式通过参数设定来选择。
其脉冲形式如图1-2-10所示。
图1-2-10 定位模块的两种输出脉冲形式频 率 (HZ ) 脉冲数(PLS ) f 1S 2 S 3S 1由于步进电动机的电磁惯性和所驱动负载的机械惯性,速度不能突变,因此定位模块要控制升降频过程。
步进电机升、降频过程如图1-2-11。
一般情况下,S 2=S 3。
图 1-2-11 步进电机升、降频示意图其中:f 1——设定的运行频率,应小于步进电动机的最高频率;S 1——设定的总脉冲个数;S 2——升频过程中脉冲个数,由加速时间和运行频率确定;S 3——降频过程中脉冲个数,由减速时间和运行频率确定。
步进电动机驱动器将位置定位模块的输出脉冲信号进行分配并放大后驱动步进电动机的各相绕组,依次通电而旋转。
驱动器也可接受两种不同形式的脉冲信号,通过开关来选择,定位模块和驱动器的脉冲形式要相同。
另外,为了提高步进电动机的低频性能,驱动器一般具有细分功能,多个脉冲步进电动机转动一步,细分系数一般为1、2、4、8、16、32等几种,通过拨码开关来设定。
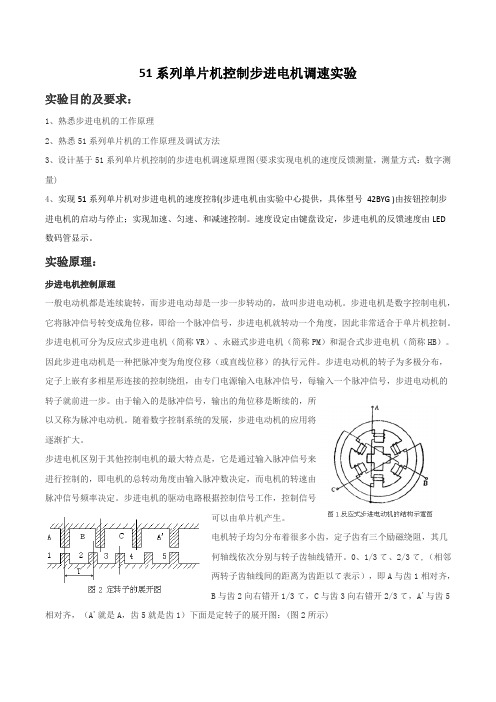
51系列单片机控制步进电机调速实验实验目的及要求:1、熟悉步进电机的工作原理2、熟悉51系列单片机的工作原理及调试方法3、设计基于51系列单片机控制的步进电机调速原理图(要求实现电机的速度反馈测量,测量方式:数字测量)4、实现51系列单片机对步进电机的速度控制(步进电机由实验中心提供,具体型号42BYG )由按钮控制步进电机的启动与停止;实现加速、匀速、和减速控制。
速度设定由键盘设定,步进电机的反馈速度由LED数码管显示。
实验原理:步进电机控制原理一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。
由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
随着数字控制系统的发展,步进电动机的应用将逐渐扩大。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路根据控制信号工作,控制信号可以由单片机产生。
电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图2所示)图1 是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。
步进电机实验7-7 步进电动机步进电动机⼜称脉冲电机,是数字控制系统中的⼀种重要的执⾏元件,它是将电脉冲信号变换成转⾓或转速的执⾏电动机,其⾓位移量与输⼊电脉冲数成正⽐;其转速与电脉冲的频率成正⽐。
在负载能⼒范围内,这些关系将不受电源电压、负载、环境、温度等因素的影响,还可在很宽的范围内实现调速,快速启动、制动和反转。
随着数字技术和电⼦计算机的发展,使步进电机的控制更加简便、灵活和智能化。
现已⼴泛⽤于各种数控机床、绘图机、⾃动化仪表、计算机外设,数、模变换等数字控制系统中作为元件。
⼀、使⽤说明D54步进电机实验装置由步进电机智能控制箱和实验装置两部分构成。
1、步进电机智能控制箱本控制箱⽤以控制步进电机的各种运⾏⽅式,它的控制功能是由单⽚机来实现的。
通过键盘的操作和不同的显⽰⽅式来确定步进电机的运⾏状况。
本控制箱可适⽤于三相、四相、五相步进电动机各种运⾏⽅式的控制。
因实验装置仅提供三相反应式步进电动机,故控制箱只提供三相步进电动机的驱动电源,⾯板上也只装有三相步进电动机的绕组接⼝。
(1)⾯板⽰意图(见附录)(2)技术指标功能:能实现单步运⾏、连续运⾏和预置数运⾏;能实现单拍、双拍及电机的可逆运⾏。
电脉冲频率:5Hz~1KHz⼯作条件:供电电源AC220V±10%,50Hz环境温度-5℃~40℃相对湿度≤80%重量:6kg尺⼨:390×200×230mm3(3)使⽤说明1)开启电源开关,⾯板上的三位数字频率计将显⽰“000”;由六位LED数码管组成的步进电机运⾏状态显⽰器⾃动进⼊“9999→8888→7777→6666→5555→4444→3333→2222→1111→0000”动态⾃检过程,⽽后停显在系统的初态“┤.3”。
2)控制键盘功能说明设置键:⼿动单步运⾏⽅式和连续运⾏各⽅式的选择。
拍数键:单三拍、双三拍、三相六拍等运⾏⽅式的选择。
相数键:电机相数(三相、四相、五相)的选择。
PLC步进电动机控制实验一、步进电机与步进电机驱动器的接线图步进电机驱动器与PLC连接,SH-2H042Ma步进电机驱动器的输入信号为CP+、CP-和DIR+、DIR-,其连接方式有三种:①共阳极方式:把CP+和DIR+接在一起作为共阳端OPTO(接外部系统的+5V),脉冲信号接入CP-端,方向信号接入DIR-端;②共阴极方式:把CP-和DIR-接在一起作为共阴端(接外部系统的GND),脉冲信号接入CP+端,方向信号接入DIR+端;③差动方式:直接连接。
二、PLC接线图PLC接线图(带驱动器)PLC 接线图(不带驱动器,输出电源电压应与步进电动机额定电压匹配) SB1为启动按钮,SB2为停止按钮,SB3为加速按钮,SB4为减速按钮。
三、按带驱动器的PLC 接线图的方式编写PLC 程序四、附录:采用西门子S7-300PLC 控制三相步进电机的过程例子电路说明:输出: A 相加电压:Q0.0B 相加电压:Q0.1C 相加电压:Q0.2 启动指示灯:Q0.3三相单三拍运行方式:Q0.4三相双三拍运行方式:Q0.5 三相单六拍运行方式:Q0.6 输出脉冲显示灯: Q0.7三相单三拍运行方式三相双三拍运行方式三相单六拍运行方式编程方法:1.使用定时器指令实现各种时序脉冲的要求:使用定器产生不同工作方式下的工作脉冲,然后按照控制开关状态输出到各相对应的输出点控制步进电机。
M0.0作为总控制状态位,控制脉冲发生指令是否启动。
一旦启动,采用T0、T1、T2以及它们的组合可以得到三相单三拍和三相双三拍的两种工作方式下,各相的脉冲信号。
如T0的状态为三相单三拍工作状态下A相的脉冲。
同理可使用类似程序得到三相单六拍时各相所需的脉冲信号。
2.使用移位指令实现各相所需的脉冲信号。
例如在MW10中进行移位,每次移位的时间为1秒钟。
如图为三相单六拍正向时序流程图,三相单三拍可利用相同的流程图,从M11.1开始移位,每次移两位,而三相双三拍从M11.2开始,每次移两位。
实验六步进电动机实验一、实验目的1、通过实验加深对步进电动机的驱动电源和电机工作情况的了解。
2、掌握步进电动机基本特性的测定方法。
二、预习要点1、了解步进电动机的工作情况和驱动电源步进电动机有哪些基本特性?怎样测定?三、实验项目图1为步进电机控制器和步进电机实验台之间的连线图步进电机控制器步进电机实验台24V0A AB BC C图1 步进电机实验连线图1、单步运行状态接通电源,将控制器系统设置于单步运行状态,或复位后,按执行键,步进电机走一步距角,绕组相应的发光管发亮,再不断按执行键,步进电机转子也不断步进运动。
改变电机转向,电机作反向步进运动。
2、角位移和脉冲数的关系控制系统接通电源,设置好预置步数,按执行键,电机运转,观察并记录电机偏转角度,再重设置另一置数值,按执行键,观察并记录电机偏转角度于表1中,并利用公式计算电机偏置较大与实际值是否一致。
表1 角位移和脉冲数的关系序号步数实际电机偏转角度理论电机偏转角度123、空载突跳频率的测定控制系统置连续运行状态,按执行键,电机连续运转后,调节速度调节旋钮使频率提高至某频率(自动指示当前频率)。
按设置键让步进电机停转,再从新启动电(按执行键),观察电机能否运行正常,如正常,则继续提高频率,直至电机不失步启动的最高频率,则该频率为步进电机的空载突跳频率。
记为Hz。
4、空载最高连续工作频率的测定步进电机空载连续运转后,缓慢调节速度调节旋钮使频率提高,仔细观察电机是否不失步,如不失步,则再缓慢提高频率,直至电机能连续运转的最高频率,则该频率为步进电机空载最高连续工作频率。
记为Hz。
5、转子振动状态的观察步进电机空载连续运转后,调节并降低脉冲频率,直至步进电机声音异常或出现电机转子来回偏摆即为步进电机的振荡状态。
6、定子绕组中电流和频率的关系在步进电机电源的输出端串联一只直流电流表(注意+、-端)使步进电机连续运转,由低到高逐渐改变步进电机的频率,读取并记录6组电流表的平均值、频率值于表2中表2 定子绕组电流和频率的关系序号 1 2 3 4 5 6f(Hz)I(A)7、平均转速和脉冲频率的关系接通电源,将控制系统设置于连续运转状态,再按执行键,电机连续运转,改变速度调节旋钮,测量频率f与对应的转速n,即n=f(f)。
实验九步进电机控制实验姓名专业通信工程学号成绩一、实验目的1.掌握keil C51软件与proteus软件联合仿真调试的方法;2.掌握步进电机的工作原理及控制方法;3.掌握步进电机控制的不同编程方法;二、实验仪器与设备1.微机1台2.keil C51集成开发环境3.Proteus仿真软件三、实验内容1.用Proteus设计一四相六线步进电机控制电路。
要求利用P1口作步进电机的控制端口,通过达林顿阵列ULN2003A驱动步进电机。
基本参考电路见后面附图。
2.编写程序,实现步进电机的正反转控制。
正反转时间分别持续10S时间,如此循环。
3.设计一可调速步进电机控制电路。
P3.2~P3.5分别接按键k1~k4,其中k1为正反转控制按键,k2为加速按键,k3为减速按键,k4为启动/停止按键,要求速度7档(1~7)可调,加减速各设3档,复位时位于4档,要求每档速度变化明显。
该步进电机控制电路在以上电路的基础上自行修改。
四、实验原理1.步进电机控制原理:1)步进电机是利用电磁铁的作用原理,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
每来一个电脉冲,步进电机转动一定角度,带动机械移动一小段距离。
特点A.来一个脉冲,转一个步距角。
B.控制脉冲频率,可控制电机转速。
C.改变脉冲顺序,可改变转动方向。
2)以反应式步进电机为例说明步进电机的结构和工作原理。
三相反应式步进电动机的原理结构图如下,定子内圆周均匀分布着六个磁极,磁极上有励磁绕组,每两个相对的绕组组成一相。
转子有四个齿。
给A相绕组通电时,转子位置如图(a),转子齿偏离定子齿一个角度。
由于励磁磁通力图沿磁阻最小路径通过,因此对转子产生电磁吸力,迫使转子齿转动,当转子转到与定子齿对齐位置时(图b),因转子只受径向力而无切线力,故转矩为零,转子被锁定在这个位置上。
由此可见:错齿是助使步进电机旋转的根本原因。
3)三相反应式步进电动机的控制原理①三相单三拍:A 相→ B 相→ C 相→ A 相②三相六拍:A→AB →B →BC →C → CA→ A③三相双三拍:AB →BC →CA→AB4)步距角计算公式:θ—步距角 Z r—转子齿数 m —每个通电循环周期的拍数2、ULN2003A:七达林顿阵列ULN2003A是集成达林顿管反相驱动电路,内部还集成了一个消线圈反电动势的二极管,可用来驱动电机、继电器等功率器件。
步进电动机实验
一.实验目的
1.加深了解步进电动机的驱动电源和电机的工作情况。
2.步进电动机基本特性的测定。
二.预习要点
1.了解步进电动机的驱动电源和工作情况
2.步进电动机有基本特性?怎样测定?
三.实验项目
1.单步运行状态
2.角位移和脉冲数的关系
3.空载实跳频率的测定
4.空载最高连续工作频率的测定
5.转子振荡状态的观察
6.定子绕组中电流和频率的关系
7.平均转速和脉冲频率的关系
四.实验设备及仪器
1.实验台主控制屏。
2.电机导轨及测速表
3.直流电压、电流、毫安表(NMEL-06A)
4.三相可调电阻器90Ω(NMEL-04A)
5.步机电机驱动电源(NMEL-10)
6.步进电机M10
7.双踪示波器
五.实验方法及步骤
1.驱动波形观察
不接电机。
a.合上控制电源船形开关,分别按下“连续”控制开关和“正转/反转”、“三拍/六拍”,“启动/停止”开关,使电机处于三拍正转连续运行状态。
b.用示波器观察电脉冲信号输出波形(CP波形),改变“调频”电位器旋钮,频率变化范围应不小于5H Z~1KH Z,可从频率计上读出此频率。
c.用示波器观察环形分配器输出的三相A、B、C波形之间的相序及其与CP脉冲波形之间的关系。
d.改变电机运行方式,使电机处于正转、六拍运行状态,重复C的实验。
(注意,每次改变电机运行,均需先弹出“启动/停止”开关,再按下“复位”按钮,再重新起动。
)
e.再次改变电机运行方式,使电机处于反转状态,重复C的实验。
2.步进电机特性的测定和动态观察。
按图6-1接线,注意接线不可接错,且接线时需断开控制电源。
a.单步运行状态
接通电源,按下述步骤操作:按下“单步”琴键开关,“复位”按钮,“清零”按钮,最后按下“单步”按钮。
每按一次“单步”按钮,步进电机将走一步距角,绕组相应的发光管发亮,不断按下“单步”按钮,电机转子也不断作步进运行,改变电机转向,电机作反向步进运动。
b.角位移和脉冲数的关系
按下“置数”琴键开关,给拔码开关预置步数,分别按下“复位”、“清零”按钮(操作以上步骤须让电机处于停止状态),记录电机所处位置。
按下“启动/停止”开关,电机运转,观察并记录电机偏转角度,填入表6-1。
再重新预置步数,重复观察并记录电机偏转角度,填入表6-1,并利用公式计算电机偏转角度与实际值是否一致。
”电位器,寻找合适的电机运转速度(可观察电机是否能正常实现正反转),使电机处于正常工作状态。
c.空载突跳频率的测定
电机处于连续运行状态,按下“启动/停止”开关,调节“调频”电位器旋钮使频率逐渐提高。
弹出“启动/停止”开关,电机停转,再重新起动电机,观察电机能否运行正常,如正常,则继续提高频率,直至电机不失步启动的最高频率,则该频率为步进电机的空载突跳频率,记为Hz。
d.空载最高连续工作频率的测定。
步进电机空载连续运转后,缓慢调节“调频”电位器旋钮,使电机转速升高,仔细观察电机是否不失步,如不失步,则继续缓慢提高频率,直至电机停转,则该频率为步进电机最高连续工作频率,记为Hz。
e.转子振荡状态的观察。
步进电机脉冲频率从最低开始逐步上升,观察电机的运行情况,有无出现电机声音异常或电机转子来回偏转,即出现步进电机的振荡状态。
f.定子绕组中电流和频率的关系。
电机在空载状态下连续运行,用示波器观察取样电阻R波形,即为控制绕组电流波形,改变频率,观察波形的变化。
g.平均转速和脉冲频率的关系
电机处于连续运行状态,改变“调频”旋钮,测量频率f(由频率计读出)与对应的转速n,则n=f(f),填入表6-2中。
六.实验报告
对上述实验内容进行总结,并加以分析
1.步进电机处于三拍、六拍不同状态时,驱动波形的关系。
2.单步运行状态:步距角= 3°
3.角位移和脉冲数关系:
4.空载突跳频率:
5.空载最高连续工作频率:
6.平均转速和脉冲频率的特性n=f(f)
七.思考题
1.影响步进电机步距的因素有哪些?采用何种方法步距最小?
2.平均转速和脉冲频率的关系怎样?为什么特别强调是平均转速?
八.注意事项。
步进电机驱动系统中控制信号部分电源和功放部分电源是不同的,绝不能将电机绕组接至控制信号部分的端子上,或将控制信号部分端子和电机绕组部分端子以任何形式连接。