电大数控专业形成性考核答案:机械设计基础资料
- 格式:doc
- 大小:94.50 KB
- 文档页数:4


电大数控专业数控机床及机械制造基础及机械设计基础形成性考核答电大数控专业数控机床形成性考核答案1数控机床练习(第一章)1填空(1)数控机床一般由控制介质、数控系统、伺服系统、机床本体、反馈装置和各种辅助装置组成。
(2)数控机床采用数字控制技术对机床的加工过程进行自动控制的一类机床。
(3)突破传统机床结构的最新一代的数控机床是并联机床。
(4)自适应控制技术的目的是在随机变化的加工过程中,自动调整加工过程中测量的工作状态和特性,并根据给定的评价指标自动修正自身的工作参数,以达到或接近最佳工作状态。
2个选择题(1)一般数控钻、镗床属于(c)(a)直线控制数控机床(b)轮廓控制数控机床(c)点控制数控机床(d)曲面控制数控机床(2)(d)是数控系统与机床本体之间的电气传动环节。
(a)控制介质(b)数控装置(c)输出装置(d)伺服系统(3)适合于加工形状特别复杂(曲面叶轮)、精度要求较高的零件的数控机床是(a)(a)加工中心(b)数控铣床(c)数控车床(d)数控线切割机床(4)闭环控制系统的位置检测装置安装在(d)中(a)传动丝杠上(b)伺服电动机轴上(c)数控装置上(d)机床移动部件上(5)根据控制运动方式的不同,数控机床可分为(b)(a)开环控制数控机床、闭环控制数控机床和半闭环控制数控机床(b)点控制数控机床、线控制数控机床和轮廓控制数控机床(c)经济型数控机床、流行型数控机床和高档数控机床(d)数控机床和数控机床(1)通常一台数控机床的联动轴数一般会大于或等于可控轴数。
(×)(2)数控机床是通过程序来控制的。
(√)(3)数控机床只用于金属切削类加工。
(×)(4)数控系统是自动加工的核心,是整个数控机床的灵魂。
(√) (5)机床本体是数控机床的机械结构实体,是完成各种切削加工的机械零件。
(√) 4个简短回答问题(1)简述数控机床的发展趋势。
P91,高速高精度2,多功能3,智能4,高可靠性(2)简要介绍了数控机床基本部件的作用。

机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,__CEF__力的指向可以假定,__ABDG__力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__的方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便。
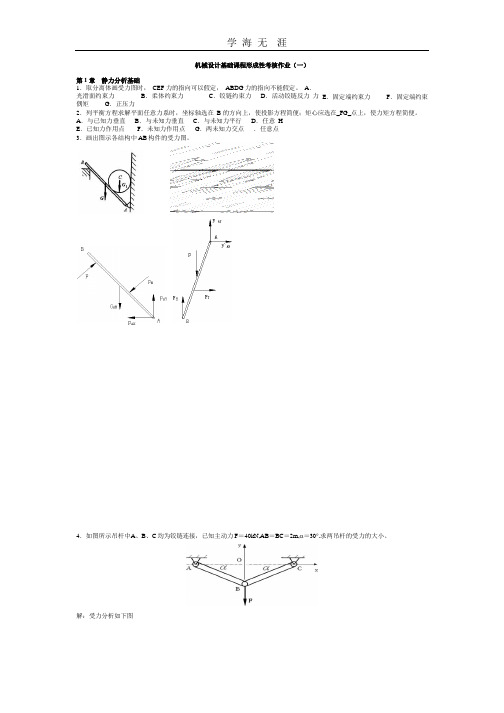
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,=30.求两吊杆的受力的大小。
解:受力分析如下图列力平衡方程:Fx0又因为AB=BCF A sinF C sinF A FCFy02F A sinFFF A F B40KN2sin第2章常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
(1)n=7,P L=10,P H=0(2)n=5,P L=7,P H=0F3n2P L PF3n2P L P HH37210352711C处为复合铰链(3)n=7,P L=10,P H=0(4)n=7,P L=9,P H=1F3n2P L PF3n2P L P HH372103729112E、E’有一处为虚约束F为局部自由度C处为复合铰链第3章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C_为机架,将得到双曲柄机构。
A.最长杆B.与最短杆相邻的构件C.最短杆D.与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类型。

电大机械设计基础形成性考核作业(一)答案第1章 静力分析基础1. C 、E 、F A 、B 、D 、G2. B F 、G3.4.解:受力分析如下图列力平衡方程:∑=0Fx又因为 AB=BCααsin sin C A F F =⋅C A F F =∑=0FyF F A =⋅αsin 2 KN F F F B A 40sin 2===∴α第2章 常用机构概述1.答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.机构的自由度计算(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =7253⨯-⨯1= 1=C 处为复合铰链(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =19273-⨯-⨯1= 2=E 、E ’有一处为虚约束F 为局部自由度C 处为复合铰链第3章 平面连杆机构1.C2.a )双曲柄机构 b )曲柄摇杆机构 c )双摇杆机构 d )双摇杆机构3.解:要得到双曲柄机构,因此AD 杆必须为最短杆;若AB 为最长杆,则AB ≥BC =150mm若BC 为最长杆,由杆长条件得:CD AB BC AD l l l l +≤+mm l l l l CD BC AD AB 130=-+≥因此AB l 的最小值为130mm4.如下图:第4章 凸轮机构1.凸轮 推杆 机架2.尖顶 滚子 平底3.盘形 圆柱 曲面4.解:(1)mm r L R R T 15515250=+-=+-=(2)(3)mm R r R L H T 3015515250=-++=-++=(4)mm r L R L r R S T T 98.10)()(22=----+=第5章 其他常用机构1.棘轮机构 槽轮机构 不完全齿机构2.左旋 右旋 三角形 矩形 梯形 锯齿形3.答:导程S :在同一螺纹线上相邻两螺纹牙之间距离。

机械设计基础课程形成性考核作业答案(一)第1章 静力分析基础1. C 、E 、F A 、B 、D 、G2. B F 、G3.4.解:受力分析如下图列力平衡方程:∑=0Fx又因为 AB=BCααsin sin C A F F =⋅C A F F =∑=0FyF F A =⋅αsin 2 KN F F F B A 40sin 2===∴α第2章 常用机构概述1.答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.机构的自由度计算(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =7253⨯-⨯1= 1=C 处为复合铰链(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =19273-⨯-⨯1= 2=E 、E ’有一处为虚约束F 为局部自由度C 处为复合铰链第3章 平面连杆机构1.C2.a )双曲柄机构 b )曲柄摇杆机构 c )双摇杆机构 d )双摇杆机构3.解:要得到双曲柄机构,因此AD 杆必须为最短杆;若AB 为最长杆,则AB ≥BC =150mm若BC 为最长杆,由杆长条件得:CDAB BC AD l l l l +≤+mm l l l l CD BC AD AB 130=-+≥因此AB l 的最小值为130mm4.如下图:第4章 凸轮机构1.凸轮 推杆 机架2.尖顶 滚子 平底3.盘形 圆柱 曲面4.解:(1)mm r L R R T 15515250=+-=+-=(2)(3)mm R r R L H T 3015515250=-++=-++=(4)mm L rT R S 98.25)(22=-+=第5章 其他常用机构1.棘轮机构槽轮机构不完全齿机构2.左旋右旋三角形矩形梯形锯齿形3.答:导程S:在同一螺纹线上相邻两螺纹牙之间距离。
机械设计基础形成性考核作业讲评(一)第1章 静力分析基础1. C 、E 、F A 、B 、D 、G 2. B F 、G3.4.解:受力分析如下图列力平衡方程:∑=0Fx又因为 AB=BCααs i n s i n C A F F =⋅ C A F F =∑=0FyF F A =⋅αs i n2KN FF F B A 40sin 2===∴α第2章 常用机构概述1.答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.机构的自由度计算(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =7253⨯-⨯ 1= 1= C 处为复合铰链(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1H L P P n F --=23 H L P P n F --=23=10273⨯-⨯ =19273-⨯-⨯ 1= 2=E 、E ’有一处为虚约束F 为局部自由度 C 处为复合铰链第3章 平面连杆机构1.C2.a )双曲柄机构 b )曲柄摇杆机构 c )双摇杆机构 d )双摇杆机构 3.解:要得到双曲柄机构,因此AD 杆必须为最短杆; 若AB 为最长杆,则AB ≥BC =150mm 若BC 为最长杆,由杆长条件得: CD AB BC AD l l l l +≤+mm l l l l CD BC AD AB 130=-+≥因此AB l 的最小值为130mm 4.如下图:第4章 凸轮机构 1.凸轮 推杆 机架 2.尖顶 滚子 平底 3.盘形 圆柱 曲面4.解:(1)mm r L R R T 15515250=+-=+-= (2)(3)mm R r R L H T 3015515250=-++=-++= (4)mm r L R L r R S T T 98.10)()(22=----+=第5章 其他常用机构1.棘轮机构 槽轮机构 不完全齿机构2.左旋 右旋 三角形 矩形 梯形 锯齿形3.答:导程S :在同一螺纹线上相邻两螺纹牙之间距离。
(精华版)国家开放大学电大专科《机械设计基础》机考网考形考网络题库及答案盗传必究考试说明:形成性考核占课程综合成绩的50%,终结性考试占课程综合成绩的50%。
题目1机器是由机构组合而成的,机构的组合一定就是机器。
选择一项:错题目2机构都是可动的。
选择一项:对题目3所有构件一定都是由两个以上零件组成的。
选择一项:错题目41.如图所示,已知一重量的物体放在水平面上,水平面和物体间的摩擦系数。
请分析下列情况:(1)(4分)当作用在物体上的水平力时,B.摩擦力为10N,物体处于平衡状态(2)(4分)当作用在物体上的水平力时,。
B.摩擦力为10N,物体处于平衡状态(3)(4分)当作用在物体上的水平力时,B.摩擦力为10N,物体处于平衡状态题目5只受两个力作用但不保持平衡的物体是二力构件。
选择一项:错题目6悬挂的小球静止不动是因为小球对绳向下的重力和绳对小球向上的拉力相互抵消的缘故。
选择一项:错题目7作用于刚体上某点的力,作用点沿其作用线移动后,不改变原力对刚体的作用效果。
选择一项:对题目8刚体上作用力偶的力偶矩大小与矩心的具体位置无关。
选择一项:对题目9作用在刚体上的二力平衡条件是_______。
选择一项:C. 大小相等、方向相反、作用线相同、作用在同一刚体上题目10下图所示的受力系统中,杆AB的正确受力图为_______。
选择一项:B.题目11如图所示,已知一重量G=100N的物体放在水平面上,水平面和物体间的摩擦系数fs=0.3。
请分析下列情况:(1)当作用在物体上的水平力F=10N时,回答。
B.摩擦力为10N,物体处于平衡状态(2)当作用在物体上的水平力F=20N时,回答C.摩擦力为20N,物体处于平衡状态(3)当作用在物体上的水平力F=40N时,回答。
D.摩擦力为40N,物体滑动题目12如图所示力F作用在梁AB的中点,F与梁AB的夹角为60°,已知力F=2kN,AB=400mm。
求:(1)梁A端的约束力回答。
形考任务三1.衡量铸铁材料强度的指标是强度极限。
(√)2.塑性材料的失效主要为断裂失效。
(×)3.由渐开线的形成过程可知,基圆内无渐开线。
(√)4.渐开线标准直齿圆柱齿轮传动,由于安装不准确,产生了中心距误差,但其传动比的大小仍保持不变。
(√)5.分度圆是计量齿轮各部分尺寸的基准。
(√)6.齿轮的标准压力角和标准模数都在分度圆上。
(√)7.模数m、直径d、齿顶高系数ha*和顶隙系数c*都是标准值的齿轮是标准齿轮。
(×)8.若齿轮连续传动,其重合度要小于1。
(×)9.斜齿轮不产生根切的最少齿数小于直齿轮。
(×)10.圆锥齿轮传动是空间齿轮传动。
(√)11.用展成法加工齿轮时,同一模数和同一压力角,但不同齿数的两个齿轮,可以使用一把齿轮刀具进行加工。
(√)12.如图所示钢制拉杆承受载荷F=32kN,若材料的许用应力,杆件横截面积为圆形,横截面的最小半径为________。
(A)A.9.2mmB.9.2mC.84.6mmD.84.6m13.渐开线齿廓基圆上的压力角_________。
(C )A.大于0B.小于0C.等于0D.等于20°14.标准齿轮的_________上的压力角为20°。
(B )A.基圆B.分度圆C.节圆D.齿顶圆15.渐开线齿廓形状取决于_______直径大小。
(A)A.基圆B.分度圆C.节圆D.齿顶圆16.用齿条型刀具展成法加工渐开线直齿圆柱齿轮,对于正常齿制的标准直齿圆柱齿轮而言,避免根切的最小齿数为________。
(B )A.16B.17C.18D.1917.为了齿轮能进入啮合,它们必须相同的是_______。
(D )A.直径B.宽度C.齿数D.基圆齿距18.(1)AC段的轴力FAC= _______。
(D )A.—40kNB.—20kNC.20kND.40kN(2)CB段的轴力FCB= _______。
(D )A.—20kNB.20kNC.40kND.60kN(3)(A)A.127.32MPaB.63.66MPaC.—63.66MPaD.—127.32MPa(4)(B )A.127.32MPaB.62.36MPaC.—63.66MPaD.—62.36MPa19.(1)变截面杆AC的轴力图为_______。
国家开放大学《机械设计基础》形考任务1-4参考答案形考作业1第1章静力分析基础1.取分离体画受力图时,(CEF)力的指向可以假定,(ABDG)力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在(B)的方向上,使投影方程简便;矩心应选在(G)点上,使力矩方程简便。
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
参考答案:4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,α=30︒.求两吊杆的受力的大小。
参考答案:列力平衡方程:ΣFx=0又因为AB=BCF A﹒sinα=F C﹒sinαF A =F CΣF Y=02F A﹒sinα=F∴F A =F B=F/ 2sinα=40KN第2章常用机构概述1.机构具有确定运动的条件是什么?参考答案:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.什么是运动副?什么是高副?什么是低副?参考答案:使两个构件直接接触并产生一定相对运动的联结,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
参考答案:(1)n=7,P L=10,P H=0F=3n-2P L-P H=3×7-2×10-0=1C处为复合铰链(2)n=5,P L=7,P H=0F=3n-2P L-P H=3×5-2×7-0=1(3)n=7,P L=10,P H=0F=3n-2P L-P H=3×7-2×10-0=1(4)n=7,P L=9,P H=1F=3n-2P L-P H=3×7-2×9-1=2E、Eˊ有一处为虚约束,F为局部自由度第3章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取___为机架,将得到双曲柄机构。
机械设计基础课程形成性考核作业答案(一)
第1章 静力分析基础
1. C 、E 、F A 、B 、D 、G
2. B F 、G
3.
4.解:受力分析如下图
列力平衡方程:
∑=0Fx
又因为 AB=BC
ααsin sin C A F F =⋅
C A F F =
∑=0Fy
F F A =⋅αsin 2 KN F F F B A 40sin 2==
=∴α
第2章 常用机构概述
1.答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.机构的自由度计算
(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0
H L P P n F --=23 H L P P n F --=23
=10273⨯-⨯ =7253⨯-⨯
1= 1=
C 处为复合铰链
(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1
H L P P n F --=23 H L P P n F --=23
=10273⨯-⨯ =19273-⨯-⨯
1= 2=
E 、E ’有一处为虚约束
F 为局部自由度
C 处为复合铰链
第3章 平面连杆机构
1.C
2.a )双曲柄机构 b )曲柄摇杆机构 c )双摇杆机构 d )双摇杆机构
3.解:要得到双曲柄机构,因此AD 杆必须为最短杆;
若AB 为最长杆,则AB ≥BC =150mm
若BC 为最长杆,由杆长条件得:
CD AB BC AD l l l l +≤+
mm l l l l CD BC AD AB 130=-+≥
因此AB l 的最小值为130mm
4.如下图:
第4章 凸轮机构
1.凸轮 推杆 机架
2.尖顶 滚子 平底
3.盘形 圆柱 曲面
4.解:(1)mm r L R R T 15515250=+-=+-=
(2)
(3)mm R r R L H T 3015515250=-++=-++=
(4)mm L rT R S 98.25)(22=-+=
第5章 其他常用机构
1.棘轮机构 槽轮机构 不完全齿机构
2.左旋 右旋 三角形 矩形 梯形 锯齿形
3.答:导程S :在同一螺纹线上相邻两螺纹牙之间距离。
线数n:在同一圆柱面上制造螺纹线的数目。
螺距p:相邻两螺纹牙平行侧面间的轴向距离。
因此np
S。