CAN总线信号的编码格式-Intel与Motorola的区别
- 格式:docx
- 大小:676.81 KB
- 文档页数:8

motorola和inter报文dbc解析-回复在汽车领域,通信协议起着关键作用,它们使得车辆内部各个模块能够相互通信和协调工作。
而DBC(Diagnostics Communication Protocol)是一种流行的协议,用于定义和解析车辆之间的通信信息。
本文将以"motorola和inter报文DBC解析"为主题,一步一步详细介绍这两种协议以及其在汽车通信领域中的应用。
首先,让我们来了解一下Motorola CAN(Controller Area Network)协议。
CAN是一种高性能的车载总线通信协议,由Motorola公司在1983年推出。
CAN协议支持多个节点在同一个总线上进行通信,其主要特点是高可靠性和实时性。
而Motorola CAN协议的特殊之处在于其使用了Motorola格式的数据帧结构。
Motorola格式的数据帧由ID字段和Data 字段组成,其中ID字段用于标识消息的优先级和内容,而Data字段则用于携带实际的数据。
通过解析Motorola格式的数据帧,可以获取发送节点的信息以及传输的具体数据。
与之类似,INTER(International Electronics and Engineering Company)也是一种通信协议,用于定义和解析车辆之间的通信信息。
INTER协议通常与CAN协议结合使用,以实现车辆内部各个模块的通信和协调。
INTER协议的消息是以DBC(Diagnostics Booting Configuration)文件的形式进行定义和存储的。
DBC文件是一个文本文件,其中包含了INTER协议的数据结构和通信信息。
通过解析DBC文件,可以获取到各个节点之间的通信消息、数据格式以及相应的信号定义等信息。
现在,让我们来介绍一下如何进行Motorola和Inter报文的DBC解析。
首先,我们需要使用相应的工具和软件来读取DBC文件,并将其转换为易于理解和操作的格式。

对CAN总线的常见编码格式解析我们在进行CAN总线的通讯设计过程中,对于通讯矩阵的建立,我们常常会选择一种编码方式,最常见的编码格式是Intel格式和Motorola格式。
但是往往人们都是以一种习惯去选择,究竟两种格式具体的区别在哪里呢?我们需要明白两种格式对信号是如何排布的,又是按照什么顺序进行正确解析的.本篇文章就是作者根据在整理通讯矩阵和dbc文件中遇到的一些问题,提出的自己的一些体会和见解,希望大家通过此篇文章对两种格式有更加深刻的理解.我们在设计初期,都会首先选择一种编码格式,这种选择大多都是根据设计者自己的习惯,具体Intel格式和Motorola格式哪个更有优势的问题,在这里没有区别。
但是就使用者而言,需要对接收到数据帧进行正确的解析,否则就无法得到想要的信号。
下面我们就来说一下两种格式的区别。
首先我们需要明确一点,无论是Intel格式还是Motorola格式,在每个字节中,数据传输顺序都是从高位(msb)传向低位(lsb)。
如下图所示.byte xbit(8*x+7)bit(8*x)msb lsb注:x=0,1,2,3 (7)图1一般主机厂设计人员在设计初期都会定义好字节的发送顺序,定义Byte0为LSB,Byte7为MSB。
第一种情况:先发送Byte0,然后Byte1到Byte7;第二种情况:先发送Byte7,然后Byte6到Byte0。
根据我了解到的大部分主机厂都会采取第一种发送方法,很少会采取后者。
我们在用CANoe中的CANdb++编辑数据库时,肯定会用到如下图所示的编辑界面。
图2结合工作中的出现的问题,有的网络设计者会在排布信号的时候出现误区。
上图中用的是比较常规的排布方式,即位在字节中的索引是从右至左,还有一种是颠倒过来的,即从左至右。
如下图所示。
图3我们现在以第一种矩阵模式进行说明。
在这种情况下,如果主机厂在初期定义先发送LSB,再发送的MSB的形式,那么数据信号可以按照从上到下,从左到右的顺序发送,非常方便,接收器解析起来也比较容易。

motorola和inter报文dbc解析摘要:1.Motorola 和Intel 报文DBC 解析概述2.Motorola 报文DBC 解析3.Intel 报文DBC 解析4.解析DBC 报文的工具和方法5.DBC 报文解析在实际场景中的应用正文:一、Motorola 和Intel 报文DBC 解析概述在通信领域,Motorola 和Intel 都是重要的通信设备制造商。
他们的设备在传输数据时,会使用一种名为“报文数据库(DBC)”的协议来解析和处理数据。
报文数据库包含了设备间通信所需的所有信息,如数据格式、校验和、控制字段等。
解析DBC 报文可以帮助我们更好地理解设备间的通信过程,从而优化通信效率和解决通信问题。
二、Motorola 报文DBC 解析Motorola 的DBC 报文解析主要依赖于其特有的报文格式和解析规则。
Motorola 的DBC 报文通常包含以下几个部分:1.报文头:包括报文类型、报文长度和校验和等信息。
2.控制字段:包括数据传输方向、数据传输速率和数据传输协议等控制信息。
3.数据字段:包含了实际传输的数据。
4.校验和字段:用于检测数据传输过程中的错误。
三、Intel 报文DBC 解析与Motorola 类似,Intel 的DBC 报文也包含报文头、控制字段、数据字段和校验和字段。
不同之处在于,Intel 的DBC 报文有一些特定的报文格式和解析规则,例如,Intel 的报文头中可能包含更多的控制信息,以满足其特定的通信需求。
四、解析DBC 报文的工具和方法解析DBC 报文通常需要使用一些专业的解析工具,如Wireshark、tcpdump 等。
这些工具可以捕获网络数据包,并将其转换为易于理解的格式。
此外,也有一些编程语言库,如Python 的socket 库,可以用来解析DBC 报文。
五、DBC 报文解析在实际场景中的应用DBC 报文解析在通信设备调试、网络优化和故障排查等场景中都有广泛的应用。
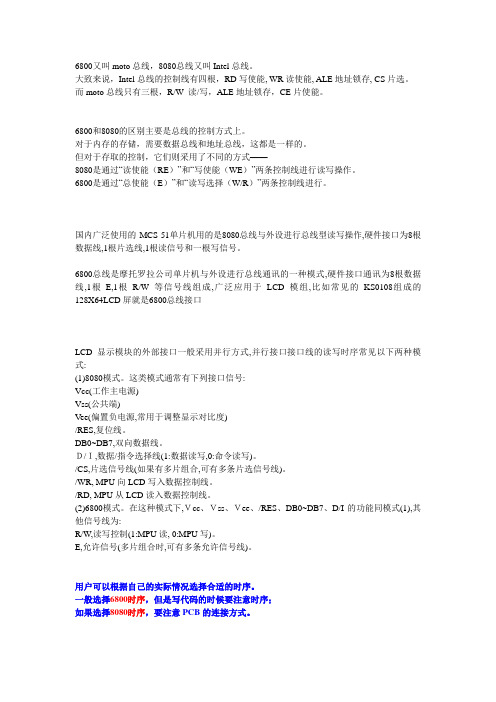
6800又叫moto总线,8080总线又叫Intel总线。
大致来说,Intel总线的控制线有四根,RD写使能, WR读使能, ALE地址锁存, CS片选。
而moto总线只有三根,R/W 读/写,ALE地址锁存,CE片使能。
6800和8080的区别主要是总线的控制方式上。
对于内存的存储,需要数据总线和地址总线,这都是一样的。
但对于存取的控制,它们则采用了不同的方式——8080是通过“读使能(RE)”和“写使能(WE)”两条控制线进行读写操作。
6800是通过“总使能(E)”和“读写选择(W/R)”两条控制线进行。
--------------------------------------------------------------------------------国内广泛使用的MCS-51单片机用的是8080总线与外设进行总线型读写操作,硬件接口为8根数据线,1根片选线,1根读信号和一根写信号。
6800总线是摩托罗拉公司单片机与外设进行总线通讯的一种模式,硬件接口通讯为8根数据线,1根E,1根R/W等信号线组成,广泛应用于LCD模组,比如常见的KS0108组成的128X64LCD屏就是6800总线接口LCD显示模块的外部接口一般采用并行方式,并行接口接口线的读写时序常见以下两种模式:(1)8080模式。
这类模式通常有下列接口信号:Vcc(工作主电源)Vss(公共端)Vee(偏置负电源,常用于调整显示对比度)/RES,复位线。
DB0~DB7,双向数据线。
D/I,数据/指令选择线(1:数据读写,0:命令读写)。
/CS,片选信号线(如果有多片组合,可有多条片选信号线)。
/WR, MPU向LCD写入数据控制线。
/RD, MPU从LCD读入数据控制线。
(2)6800模式。
在这种模式下,Vcc、Vss、Vee、/RES、DB0~DB7、D/I的功能同模式(1),其他信号线为:R/W,读写控制(1:MPU读, 0:MPU写)。
6800又叫moto总线,8080总线又叫Intel总线。
大致来说,Intel总线的控制线有四根,RD写使能, WR读使能, ALE地址锁存, CS片选。
而moto总线只有三根,R/W 读/写,ALE地址锁存,CE片使能。
6800和8080的区别主要是总线的控制方式上。
对于内存的存储,需要数据总线和地址总线,这都是一样的。
但对于存取的控制,它们则采用了不同的方式——8080是通过“读使能(RE)”和“写使能(WE)”两条控制线进行读写操作。
6800是通过“总使能(E)”和“读写选择(W/R)”两条控制线进行。
--------------------------------------------------------------------------------国内广泛使用的MCS-51单片机用的是8080总线与外设进行总线型读写操作,硬件接口为8根数据线,1根片选线,1根读信号和一根写信号。
6800总线是摩托罗拉公司单片机与外设进行总线通讯的一种模式,硬件接口通讯为8根数据线,1根E,1根R/W等信号线组成,广泛应用于LCD模组,比如常见的KS0108组成的128X64LCD屏就是6800总线接口LCD显示模块的外部接口一般采用并行方式,并行接口接口线的读写时序常见以下两种模式:(1)8080模式。
这类模式通常有下列接口信号:Vcc(工作主电源)Vss(公共端)Vee(偏置负电源,常用于调整显示对比度)/RES,复位线。
DB0~DB7,双向数据线。
D/I,数据/指令选择线(1:数据读写,0:命令读写)。
/CS,片选信号线(如果有多片组合,可有多条片选信号线)。
/WR, MPU向LCD写入数据控制线。
/RD, MPU从LCD读入数据控制线。
(2)6800模式。
在这种模式下,Vcc、Vss、Vee、/RES、DB0~DB7、D/I的功能同模式(1),其他信号线为:R/W,读写控制(1:MPU读, 0:MPU写)。

Python实现CAN报⽂转换⼯具教程⼀、CAN报⽂简介CAN是控制器局域⽹络(Controller Area Network, CAN)的简称,是由以研发和⽣产汽车电⼦产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应⽤最⼴泛的现场总线之⼀。
在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌⼊式⼯业控制局域⽹的标准总线,并且拥有以CAN为底层协议专为⼤型货车和重⼯机械车辆设计的J1939协议。
CAN总线以报⽂为单位进⾏数据传送。
CAN报⽂按照帧格式可分为标准帧和扩展帧,标准帧是具有11位标识符的CAN帧,扩展帧是具有29位标识符的CAN帧。
按照帧类型可分为:1.从发送节点向其它节点发送数据;2.远程帧:向其它节点请求发送具有同⼀识别符的数据帧;3.错误帧:指明已检测到总线错误;4.过载帧:过载帧⽤以在数据帧(或远程帧)之间提供⼀附加的延时。
共有两种编码格式:Intel格式和Motorola格式,在编码优缺点上,Motorola格式与Intel格式并没有孰优孰劣之分,只不过根据设计者的习惯,由⽤户⾃主选择罢了。
当然,对于使⽤者来讲,在进⾏解析之前,就必须要知道编码的格式是哪⼀种,否则,就不能保证正确地解析信号的含义。
以下就以8位字节编码⽅式的CAN总线信号为例,详细分析⼀下两者之间的区别。
Intel编码格式当⼀个信号的数据长度不超过1个字节(8位)并且信号在⼀个字节内实现(即该信号没有跨字节实现):该信号的⾼位(S_msb)将被放在该字节的⾼位,信号的低位(S_lsb)将被放在该字节的低位。
当⼀个信号的数据长度超过1个字节(8位)或者数据长度不超过⼀个字节但是采⽤跨字节⽅式实现时:该信号的⾼位(S_msb)将被放在⾼字节(MSB)的⾼位,信号的低位(S_lsb)将被放在低字节(LSB)的低位。
Motorola编码格式当⼀个信号的数据长度不超过1个字节(8位)并且信号在⼀个字节内实现(即该信号没有跨字节实现):该信号的⾼位(S_msb)将被放在该字节的⾼位,信号的低位(S_lsb)将被放在该字节的低位。
对CAN总线的常见编码格式解析我们在进行CAN总线的通讯设计过程中,对于通讯矩阵的建立,我们常常会选择一种编码方式,最常见的编码格式是Intel格式和Motorola格式。
但是往往人们都是以一种习惯去选择,究竟两种格式具体的区别在哪里呢?我们需要明白两种格式对信号是如何排布的,又是按照什么顺序进行正确解析的。
本篇文章就是作者根据在整理通讯矩阵和dbc文件中遇到的一些问题,提出的自己的一些体会和见解,希望大家通过此篇文章对两种格式有更加深刻的理解。
我们在设计初期,都会首先选择一种编码格式,这种选择大多都是根据设计者自己的习惯,具体Intel格式和Motorola格式哪个更有优势的问题,在这里没有区别。
但是就使用者而言,需要对接收到数据帧进行正确的解析,否则就无法得到想要的信号。
下面我们就来说一下两种格式的区别。
首先我们需要明确一点,无论是Intel格式还是Motorola格式,在每个字节中,数据传输顺序都是从高位(msb)传向低位(lsb)。
如下图所示。
byte xbit(8*x+7)bit(8*x)msb lsb注:x=0,1,2,3 (7)图1一般主机厂设计人员在设计初期都会定义好字节的发送顺序,定义Byte0为LSB,Byte7为MSB。
第一种情况:先发送Byte0,然后Byte1到Byte7;第二种情况:先发送Byte7,然后Byte6到Byte0。
根据我了解到的大部分主机厂都会采取第一种发送方法,很少会采取后者。
我们在用CANoe中的CANdb++编辑数据库时,肯定会用到如下图所示的编辑界面。
图2结合工作中的出现的问题,有的网络设计者会在排布信号的时候出现误区。
上图中用的是比较常规的排布方式,即位在字节中的索引是从右至左,还有一种是颠倒过来的,即从左至右。
如下图所示。
图3我们现在以第一种矩阵模式进行说明。
在这种情况下,如果主机厂在初期定义先发送LSB,再发送的MSB的形式,那么数据信号可以按照从上到下,从左到右的顺序发送,非常方便,接收器解析起来也比较容易。
motorola和inter报文dbc解析1.引言在汽车电子领域,通信协议是各个控制器之间进行数据交换的重要方式之一。
而D BC(D at a Ba se Co nt ai ne r)文件是一种常见的描述车辆通信协议的文件格式。
本文将介绍M ot or ol a和I nt el两种常见的报文D B C解析方式,帮助读者更好地理解和应用这两种解析方法。
2. Mo torola报文D B C解析M o to ro la格式是一种常用的嵌入式系统中使用的网络报文格式。
该格式以位为基本单位,将数据以字节为单位进行编码和传输。
以下是M o to ro la报文DB C解析的基本过程:解析报文头1.:解析D BC文件的文件头部分,获取报文的基本信息,如报文版本号、创建者信息等。
解析节点2.:根据DB C文件定义的节点信息,解析出各个参与通信的节点的属性,例如节点名称、节点ID等。
解析消息 3.:根据D B C文件定义的消息信息,解析出所有的消息结构,包括消息ID、名称、发送周期等。
解析信号4.:针对每个消息,解析出其中包含的信号信息,包括信号名称、起始位、长度、数据类型等。
解析信号值5.:对于每个信号,根据D BC文件定义的物理值表,解析出对应的物理值和工程值,方便后续的数据处理和分析。
3. In tel报文D B C解析I n te l格式是一种常见的计算机领域中使用的网络报文格式。
该格式以字节为基本单位,采用Li tt le-E nd ian字节顺序进行编码和传输。
以下是In te l报文D BC解析的基本过程:解析报文头1.:解析D BC文件的文件头部分,获取报文的基本信息,如报文版本号、创建者信息等。
解析节点2.:根据DB C文件定义的节点信息,解析出各个参与通信的节点的属性,例如节点名称、节点ID等。
解析消息 3.:根据D B C文件定义的消息信息,解析出所有的消息结构,包括消息ID、名称、发送周期等。
Intel Bus与Motorola Bus区别(Intel模式与Motorola模式的区别)在实际应用中用到的很多带并行总线的芯片的硬件连接、读写操作都分为INTERL BUS和MOTOROLA BUS(某些文献上又叫INTERL 模式和MOTOROLA 模式)这可以在相应的芯片手册上看到,比如说MAXIM 的DS12887,PHILPS的SJA1000等器件。
那么究竟什么是INTERL BUS和MOTOROLA BUS?二者又有什么区别呢?INTERL BUS和MOTOROLA BUS实际是指微控制器外部的控制总线(配合地址、数据总线完成总线操作)主要是针对于外部的存储器或者带多个寄存器的IO设备的。
其区别来源于INTERL和MOTOROLA 两家公司生产的处理器结构不同,最为典型的像在早期的PC系列处理器如INTERL的8086和MOTOROLA的MC6800以及后来的单片机系列如INTEL的8031和MOTOROLA的68HC11中皆可以看到。
通常INTERL BUS的典型组成是:/RD:读外部设备,低电平有效/WR:写外部设备,低电平有效ALE:Address Lock Eable,地址锁存(下降沿有效,部分地址数据复用器件才有)/CS:Chip-Select器件选择(片选)ADD:地址总线DATA:数据总线典型控制器:MOTOROLA BUS的典型组成是::Read/Write,高电平读外部设备,低电平写外部设备AS(或VMA,/AS):Address Strobe/Valid Memory Address,地址脉冲输入(下降沿/高电平有效,部分地址数据复用器件才有)/CS:Chip-Select,器件选择(片选)ADD:地址总线DATA:数据总线典型控制器:由此可见INTERL BUS和MOTOROLA BUS的区别是:INTERL BUS使用两根引脚的低电平信号(二者互斥)来指明读写操作,而MOTOROLA BUS则使用一根引脚高低电平来指明读写操作,二者对于地址的锁存是类似但相关引脚命名不一样。
Intel低字节在前
Motorola高字节在前
在进行CAN总线通信设计或者测试过程中,经常看到CAN总线信号的编码格式有两种定
义:Intel格式与Motorola格式。
究竟两种编码格式有什么样的区别呢?设计者、dbc文件编辑者或者测试人员又该如何判断两种格式,并进行有效正确的配置和解析呢?下面作者给出自己在设计和测试过程中的一点体会和见解,希望能够总结出来加深一下印象和理解。
在编码优缺点上,Motorola格式与Intel格式并没有孰优孰劣之分,只不过根据设计者的习惯,由用户自主选择罢了。
当时,对于使用者来讲,在进行解析之前,就必须要知道编码的格式是哪一种,否则,就不能保证正确地解析信号的含义。
以下就以8位字节编码方式的CAN 总线信号为例,详细分析一下两者之间的区别。
首先,介绍一下CAN总线的数据传输规则,首先传输一个字节的高位(msb),最后传输该字节的低位(lsb)。
如下图所示。
一般情况下,主机厂在定义CAN总线信号定义时,都会明确定义字节的发送顺序,即:以首先发送byte0(LSB),然后byte1,byte2,……(MSB)的发送顺序;还是以首先发送byte7(MSB),然后byte6,byte5,……(LSB)的发送顺序。
据作者了解到的多个主机厂定义的CAN总线字节发送顺序均为前者(即:首先发送LSB,最后发送MSB)。
这一点可以从目前主流的CAN总线信号数据库编辑器德国verctor公司的CANoe软件工具的定义上看出,CANoe中的CANdb++编辑器中默认定义的CAN数据场的字节结构及每一位的排布入下图所示。
在这种情况下,如果主机厂采用的是首先发送LSB,最后发送MSB的发送顺序,则在上表中可直接按照从左至右,从上至下的顺序依次对信号进行排布即可;但是,如果主机厂采用的是首先发送MSB,最后发送LSB的发送顺序,则在上表中需要从下至上,从右至左的顺序依次对信号进行排布,这样就比较难以对应,而且信号与数据场各字节之间的映射关系也不太直观。
所以,一般来讲,主机厂会采用首先发送LSB,最后发送MSB的发送顺序。
下面就以CAN总线报文的发送顺序为首先发送LSB,最后发送MSB的方式为前提,介绍Intel 格式与Motorola格式这两种编码方式的不同之处。
一、采用Intel格式编码
当一个信号的数据长度不超过1个字节(8位)并且信号在一个字节内实现(即,该信号没有跨字节实现)时,该信号的高位(S_msb)1将被放在该字节的高位,信号的低位(S_lsb)2将被放在该字节的低位。
这样,信号的起始位3就是该字节的低位。
下图分别以4位和8
位数据长度的两种信号为例进行了说明,并给出了某一车型的通信矩阵CANoe中的CAN数据库实现的图片说明。
当一个信号的数据长度超过1个字节(8位)或者数据长度不超过一个字节但是采用跨字节方式实现时,该信号的高位(S_msb)将被放在高字节(MSB)的高位,信号的低位(S_lsb)将被放在低字节(LSB)的低位。
这样,信号的起始位就是低字节的低位。
对于一个信号的数据长度不超过一个字节,但是采用跨字节方式实现的这种情况,因其对信号解析和编码以及信号完整性都存在不利因素,所以主机厂在定义某一车型(系)的整车通信矩阵时,不太可能设计出这种编码结构。
本文就不再考虑和分析这种较为特殊的情况,但其原理与本文讨论的其他情况是相同的。
下图分别以12位和16位数据长度的两种信号为例进行了说明,并给出了CANoe中的某一车型的通信矩阵的CAN数据库的图片说明。
二、采用Motorola格式编码
当一个信号的数据长度不超过1个字节(8位)并且信号在一个字节内实现(即,该信号没有跨字节实现)时,信号的高位(S_msb)将被放在该字节的高位,信号的低位(S_lsb)将被放在该字节的低位。
这样,信号的起始位就是该字节的低位。
下图分别以4位和8位数据长度的两种信号为例进行了说明,并给出了某一车型的通信矩阵在CANoe中CAN数据库实现的图片说明。
当一个信号的数据长度超过1个字节(8位)或者数据长度不超过一个字节但是采用跨字节方式实现时,该信号的高位(S_msb)将被放在低字节(MSB)的高位,信号的低位(S_lsb)将被放在高字节(LSB)的低位。
这样,信号的起始位就是高字节的低位。
对于一个信号的数据长度不超过一个字节,但是采用跨字节方式实现的这种情况,因其对信号解析和编码以及信号完整性都存在不利因素,所以主机厂在定义某一车型(系)的整车通信矩阵时,不太可能设计出这种编码结构。
本文就不再考虑和分析这种较为特殊的情况,但其原理与本文讨论的其他情况是相同的。
下图分别以12位和16位数据长度的两种信号为例进行了说明,并给出了CANoe中的某一车型的通信矩阵的CAN数据库的图片说明。
由上,可以看出,当一个信号的数据长度不超过1个字节(8位)时,Intel与Motorola两种格式的编码结果没有什么不同,完全一样。
当信号的数据长度超过1个字节(8位)时,两者的编码结果出现了明显的不同。
文中术语解释及定义:
1. 信号的高位,即最能表达信号特性的因子,比如:车速信号500km/h按照给定的公
式,转换成十六进制数为0x6A5,因为6代表的数量级最大(162),那么其中6就是其信号的高位。
2. 信号的低位,即最不能表达信号特性的因子,比如:车速信号500km/h按照给定的
公式,转换成十六进制数为0x6A5,因为5代表的数量级最小(160),那么其中5就是其信号的低位。
3. 信号的起始位,一般来讲,主机厂在定义整车CAN总线通信矩阵时,其每一个信
号都从其最低位开始填写,这样也符合使用习惯。
所以信号的起始位就是信号的最
低位。
这也与CANoe中CANdb++的定义Startbit含义一致。