汽车稳定性控制系统模型及横摆控制仿真_欧健
- 格式:pdf
- 大小:389.90 KB
- 文档页数:5


汽车ESP系统模型和模糊控制仿真
欧健;房占鹏;王林峰
【期刊名称】《重庆邮电大学学报(自然科学版)》
【年(卷),期】2010(022)004
【摘要】汽车电子稳定系统(electronic stability program,ESP)是行驶车辆的一种主动安全系统.它综合了制动防抱死系统,驱动力控制系统和横摆力矩控制系统使行驶车辆的安全性得到很大地提高.建立了七自由度整车模型、magic formula轮胎模型以及车辆参考模型,采用车辆质心侧偏角的状态差异法,应用模糊控制理论设计了质心侧偏角反馈控制器,将建立的模糊控制器模型和汽车动力学模型组合起来,并通过前轮转角阶跃输入和正弦输入,在常见的易于失稳的湿滑路面上对典型工况进行仿真.结果表明:所设计的控制器可以很好地控制汽车的横摆角速度和质心侧偏角,提高了车辆的稳定性.
【总页数】5页(P516-520)
【作者】欧健;房占鹏;王林峰
【作者单位】重庆理工大学,重庆汽车学院,重庆,400050;重庆理工大学,重庆汽车学院,重庆,400050;重庆理工大学,重庆汽车学院,重庆,400050
【正文语种】中文
【中图分类】TP27
【相关文献】
1.汽车主动悬架与ESP系统协同控制仿真 [J], 张新;高洁;黄生豪
2.基于模糊控制的汽车ESP系统仿真 [J], 欧健;刘广明;陈毅挺;杨鄂川;张勇
3.汽车ESP系统模型与模糊仿真 [J], 付郁涵;陈文庆;张莹
4.汽车ESP系统联合控制仿真研究 [J], 张丽霞;孙杨;潘福全;陈肖媛
5.基于模糊控制的汽车ESP系统仿真研究 [J], 李松焱;闵永军;王良模;安丽华因版权原因,仅展示原文概要,查看原文内容请购买。
汽车稳定性控制系统的研究与仿真
刘波
【期刊名称】《客车技术》
【年(卷),期】2014(000)003
【摘要】在线性二自由度车辆模型基础上,采用直接横摆力矩控制方法,选取质心侧偏角和横摆角速度作为稳定性控制系统的主控变量,设计了三种具有针对性的基于滑模变结构理论的车辆操纵稳定性控制策略——质心侧偏角、横摆角速度和两者联合的滑模变结构控制.在Matlab/ Simulink平台上,对三种汽车稳定性控制策略的具体应用进行仿真分析,验证了所设计稳定性控制算法的有效性和鲁棒性.
【总页数】5页(P22-25,28)
【作者】刘波
【作者单位】成都利君实业股份有限公司
【正文语种】中文
【相关文献】
1.汽车稳定性控制系统模型及横摆控制仿真 [J], 欧健;周鑫华;张勇;邓国红
2.汽车稳定性控制系统模型及横摆控制仿真 [J], 欧健;周鑫华;张勇;邓国红;
3.汽车列车系统稳定性分析及控制系统仿真 [J], 徐梁征;肖成永;张建武
4.基于联合仿真的汽车横摆稳定性控制系统研究 [J], 康南; 周鹏
5.汽车动力学稳定性控制系统仿真平台研究 [J], 李亮;宋健;于良耀
因版权原因,仅展示原文概要,查看原文内容请购买。
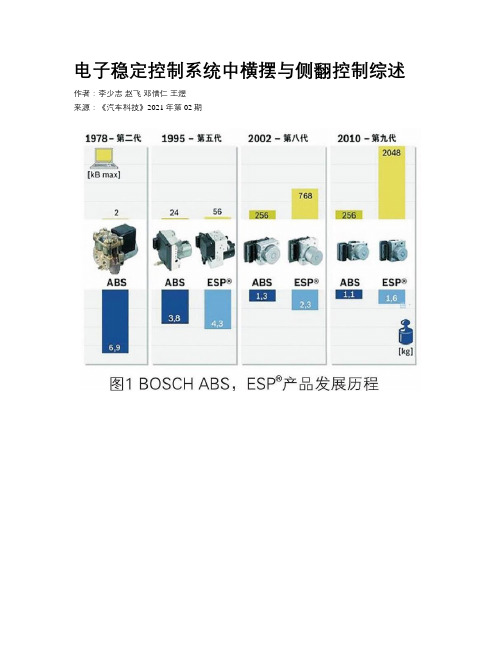
电子稳定控制系统中横摆与侧翻控制综述作者:李少志赵飞邓惜仁王煜来源:《汽车科技》2021年第02期摘要:电子稳定控制系统(以下简称稳定控制系统)是当下乘用车装备较为普遍的主动安全控制系统,基础的稳定控制系统主要监控车辆的横摆,当目标横摆与实际横摆的差值的绝对值大于横摆门限时系统激活,通过制动将车辆的横摆控制在驾驶员可接受范围内,从而修正车辆的过度和不足转向。
但对于静态稳定系数较小、悬架调教偏向舒适性的SUV车辆,在极限工况下,基础的系统仅能修正车辆横摆但不能抑制侧翻,因此需要增加防侧翻功能。
防侧翻功能主要监控方向盘转角的速率、横向加速度的变化率、横摆角速度变化率等。
防侧翻功能依据摩擦圆原理,通过增大轮胎与地面之间的纵向力来削弱横向力,进而削弱横向加速度,最终实现抑制车辆侧翻。
关键词:车身电子稳定控制系统;横摆稳定性;防侧翻功能;静态稳定系数;摩擦圆中图分类号:U467.1+1 文献标识码:A 文章编号:1005-2550(2021)02-0096-08Abstract: Electronic Stability Control System (hereinafter referred as ESC) is widely used in vehicle active safety control system,base ESC monitors vehicle’ s yaw rate. When the absolute value of the difference between target yaw rate and actual yaw rate exceed the threshold, yaw rate stability control active. Independently modifying the 4-wheels’ brake p ressures to control the yaw rate within the driver acceptable range, amending over-steering and under-steering tendency. For vehicle with small SSF (Static Stability Factor) and soft suspension, base ESC can only amend yaw rate but without mitigate roll-over in critical dynamic situation. So RMI (Roll Movement Intervention)function needs added to lower the roll-over risk. RMI mainly monitoring steering wheel angle (hereinafter referred as SAS) gradient, lateral acceleration (hereinafter referred as Ay)gradient, yaw rate (hereinafter referred as YR) gradient, etc. RMI control logic is based on Kamm circle, by increasing longitudinal force (hereinafter referred as Fx) to decrease lateral force (hereinafter referred as Fy), then decrease Ay, finally mitigate the roll angle and lower the roll-over risk.Key Words: Electronic Stability Control; Yaw Rate Stability; Roll Movement Intervention; static Stability Factor; Kamm Circle前言在濕滑的道路行使时,如果遇到突发情况需要进行紧急避让,在ESP®问世之前,普通驾驶员往往很难在如此工况下保证车辆的行使稳定性,通常车辆会失控冲出铺装路面翻到沟里或不可避免地撞上障碍物,同时带来严重的人身伤亡[2]。

基于模糊PID控制的汽车横向稳定性控制研究与仿真的开题报告【摘要】随着汽车工业的不断发展,汽车已经成为了人们日常生活中不可或缺的交通工具,但随之而来的问题是汽车横向稳定性不足,容易导致交通事故。
因此,本文提出了一种基于模糊PID控制的汽车横向稳定性控制方法,以解决这一问题。
在该方法中,采用了模糊控制和PID控制相结合的方式,通过对车辆侧向加速度进行控制,以提高车辆的横向稳定性。
本文通过建立汽车的横向稳定性控制模型,采用MATLAB/Simulink 进行了仿真实验。
仿真结果表明,该控制方法可以有效地提高汽车的横向稳定性,减少车辆侧翻和失控的风险,从而保障行车安全。
【关键词】模糊PID控制,汽车横向稳定性,MATLAB/Simulink,仿真实验【研究背景与意义】汽车交通事故在日常生活中屡见不鲜,其中很大一部分都是由于车辆失控或侧翻导致的。
因此,提高汽车的横向稳定性是保障行车安全的重要措施之一。
目前,汽车横向稳定性控制方法主要包括传统的PID(比例、积分、微分)控制和模糊控制等。
但传统PID控制方法存在参数调节难的问题,而单纯采用模糊控制方法不能兼顾控制精度和实时性。
因此,本文提出了一种基于模糊PID控制的汽车横向稳定性控制方法,以解决传统PID控制和模糊控制方法的问题。
【研究内容与方法】本文首先建立了汽车横向稳定性控制模型,然后采用模糊PID控制方法进行控制。
具体来说,该方法以车辆侧向加速度作为控制量,通过PID控制和模糊控制相结合的方式进行控制。
PID控制用于输出控制量,模糊控制用于调节控制量的参数,从而实现对车辆横向稳定性的控制。
本文采用MATLAB/Simulink进行了仿真实验。
在仿真中,模拟了汽车在各种道路条件下的运行情况,并对控制方法进行了比较。
通过对仿真结果的分析,评价了控制方法的效果。
【预期结果】预计通过本文的研究,可以提出一种基于模糊PID控制的汽车横向稳定性控制方法,并通过仿真实验验证该方法的可行性和有效性。
汽车动力学稳定性横摆力矩和主动转向联合控制策略的仿
真研究的开题报告
一、选题的背景与意义
随着社会经济的不断发展,汽车在人们的生活中变得越来越普及,特别是在交通工具方面,越来越多的人选择使用汽车出行。
在车辆的驾驶中,稳定性高和操控性好的汽车更能得到消费者的青睐。
汽车运动的稳定性是一个重要的指标之一。
在汽车行驶中,如果出现横向摆动现象,驾驶员的驾驶体验会降低,甚至会危及行车安全。
因此,提高汽车的稳定性对于提高驾驶体验和行车安全具有重要的意义。
近年来,随着电子技术和控制技术的不断发展,汽车动力学稳定性的研究和控制得到了越来越广泛的应用。
其中,横摆力矩和主动转向联合控制策略可以提高轿车的稳定性,使轿车在运动中更加平稳,能够有效防止轿车的侧翻和失控等危险。
二、研究的主要内容
本文研究的主要内容是汽车动力学稳定性中横摆力矩和主动转向联合控制策略的仿真研究。
具体来说,本文将利用MATLAB/Simulink软件对轿车进行建模,并对轿车的动力学特性进行分析。
然后,本文将针对轿车的横向运动问题,研究横摆力矩的理论和控制方法。
在此基础上,将结合主动转向的联合控制策略,对轿车的稳定性进行控制和优化。
三、研究的意义
汽车动力学稳定性是汽车行驶中不可或缺的一个重要领域,在汽车制造和应用领域都具有广泛的应用前景。
本文研究的横摆力矩和主动转向联合控制策略,可以提高轿车的操控性能和行驶的稳定性,为驾驶员带来更好的驾驶体验。
这对于汽车制造厂商来说,是提高品牌形象和销售量的有力支持;对于驾驶员来说,是保障行车安全的有效手段。
基于联合仿真的汽车横摆稳定性控制系统研究康南; 周鹏【期刊名称】《《湖州职业技术学院学报》》【年(卷),期】2019(017)002【总页数】5页(P73-76,81)【关键词】汽车横摆稳定性控制系统; 操纵稳定性; 联合仿真; CarSimsimulink【作者】康南; 周鹏【作者单位】湖州职业技术学院机电与汽车工程学院浙江湖州 313000; 昆明冶金高等专科学校机械工程学院昆明 650033【正文语种】中文【中图分类】U463.53随着中国汽车工业的飞速发展和汽车保有量的急剧增加,汽车的安全性和操纵稳定性受到越来越多的科研人员的重视和深入研究[1]95-107。
如吴刚院、刘丹等设计了汽车横摆稳定性控制系统,并通过联合仿真的形式,验证其有效性和可靠性[2]30-35;杨秀建、王增彩等设计了主动转向和横摆稳定性集成控制系统[3]1-10;王其东、刘伟等采用滑模控制的方法,设计了汽车稳定控制系统[4]82-90,等等。
近年来,科研人员更加关注汽车横摆稳定性控制系统的开发。
汽车在进行超车换道、紧急避障和弯道转向等操作时,若轮胎力进入了非线性区,常会发生侧滑和甩尾等驾驶员难以控制的横摆失稳现象[5]300-308。
针对汽车的操纵稳定性和安全性问题,国内外专家学者从理论分析、模型仿真或场地试验等多个方面进行了广泛且深入的研究,分析了影响汽车横摆失稳的诸多因素,并设计了横摆稳定控制系统来改善汽车行驶的稳定性和安全性[6]723-732 [7]141-148。
与欧美和日本等汽车技术发达的国家相比,我国在汽车操纵稳定性方面的研究起步较晚,积累的成果较少,开发高性能的汽车横摆稳定性控制系统比较困难,装车率也较低[1]95-107。
本文主要研究汽车横摆稳定性控制问题,采用基于差动制动的控制方式来提高汽车的横摆稳定性,在CarSim中建立整车仿真模型,在Simulink中设计控制策略并搭建仿真模型,探讨CarSim与Simulink的联合仿真问题,并通过联合仿真的形式对本文设计的控制策略进行验证分析。
汽车稳定性控制系统硬件在环仿真汽车稳定性控制系统是现代车辆的重要安全装置之一,它能够帮助驾驶员在复杂路况中更好地控制车辆,提高行车安全性能。
本文将介绍汽车稳定性控制系统的原理、硬件在环仿真的概念及其在汽车稳定性控制中的应用前景。
汽车稳定性控制系统通过采集车辆的状态信息,如车速、转向角、横摆角速度等,判断车辆的行驶状态,从而控制车辆的各个执行器,如制动器、发动机等,以保持车辆的稳定性。
该系统通常由传感器、控制器和执行器组成。
传感器负责监测车辆状态信息,控制器根据传感器输入计算控制量,执行器则根据控制量对车辆进行相应的调整。
硬件在环仿真是一种有效的开发手段,它通过模拟汽车控制系统的工作环境,对控制系统进行测试和验证。
在硬件在环仿真中,控制器、传感器和执行器均由模拟器代替,测试人员可以输入各种工况下的模拟信号,观察控制系统的响应和执行情况,从而对控制策略进行调整和优化。
通过硬件在环仿真,我们可以观察到汽车稳定性控制在不同工况下的表现。
例如,在紧急避障情况下,稳定性控制系统应能迅速判断出车辆的行驶状态,并采取相应的控制措施,以保持车辆的稳定性。
通过仿真结果分析,可以验证稳定性控制系统在不同情况下的响应速度和控制效果,从而评估其性能。
汽车稳定性控制系统对于提高车辆的安全性能具有重要意义。
硬件在环仿真作为一种有效的开发手段,能够模拟汽车控制系统的工作环境,对控制策略进行测试和验证。
通过仿真结果分析,可以评估稳定性控制系统的性能,为实际应用提供参考。
随着汽车控制技术的发展,硬件在环仿真在汽车稳定性控制中的应用前景将更加广阔。
随着汽车技术的不断发展,汽车控制系统日益复杂。
为了提高汽车控制系统的开发效率和可靠性,硬件在环仿真(Hardware-in-the-Loop Simulation,简称HILS)被广泛应用于汽车控制系统开发中。
硬件在环仿真能够在原型设计阶段对控制系统进行仿真测试,及早发现并解决潜在问题,从而缩短开发周期、降低开发成本。