无线传感器网络多跳时间同步算法
- 格式:pdf
- 大小:314.99 KB
- 文档页数:5
无线传感器网络时间同步方法研究随着物联网技术的快速发展,无线传感器网络(Wireless Sensor Networks, WSNs)已经成为实现智能化、自动化和联网化的重要要素之一。
在WSNs中,时间同步是一项关键技术,它可以确保网络节点之间的时间一致性,从而实现数据的准确收集和处理。
本文将探讨无线传感器网络时间同步方法的研究,包括时钟同步协议和时间误差补偿方法。
一、时钟同步协议时钟同步协议旨在使WSNs中的节点能够在一个全局共享的时间轴上保持一致。
常见的时钟同步协议包括以下几种。
1.1 Berkeley算法Berkeley算法是一种分布式时钟同步算法,它通过选举一个特殊节点作为时间服务器来实现同步。
该算法将网络节点分为两类:时间服务器和普通节点。
时间服务器通过周期性地向所有普通节点广播时间信息来同步网络。
普通节点根据接收到的时间信息调整自己的时钟。
由于该算法采用分布式的方式,节点之间的通信开销相对较小,适用于大规模的WSNs。
1.2 RBS算法RBS(Reference Broadcast Synchronization)算法是一种基于参考广播的时钟同步算法,通过以广播方式将时间信息传播给其他节点来实现同步。
该算法先选举一个特殊节点作为参考节点,该节点拥有一个精确的时钟源。
参考节点周期性地广播时间信息,并且其他节点在接收到广播后根据参考节点的时间信息进行时钟的调整。
RBS算法适用于小规模的WSNs,但对网络中的通信开销较大。
1.3 FTSP算法FTSP(Flooding Time Synchronization Protocol)算法是一种基于洪泛方式的时钟同步算法,它通过广播方式将时间信息传播给所有其他节点。
FTSP算法基于对跳数的计算来估计节点之间的时钟差,并通过协调函数来调整时钟。
由于该算法采用全节点通信的方式,能够实现较高的同步精度。
二、时间误差补偿方法时间误差是指节点自身时钟与参考时间的差值,由于节点硬件等原因,时钟会存在一定的误差。
无线传感器网络时间同步无线传感器网络是由许多分布式传感器节点组成的,这些节点能够自组织通信,以收集数据和感知环境。
由于这些节点必须协作,因此它们必须具有准确的时钟以便能够对数据或事件进行同步。
无线传感器网络时间同步旨在协调网络中的每个节点以确保它们具有相同的时间参考。
它是网络内数据可靠性和完整性的基础,因为许多应用程序需要使用时间戳和顺序号来正确处理数据。
但是,在无线传感器网络中实现时间同步是具有挑战性的,因为节点的时钟精度可能受到环境条件和硬件偏差的影响。
下面是一些目前用于无线传感器网络时间同步的主要协议和技术:1. 基于发送时间戳的时间同步协议基于发送时间戳的时间同步协议是最常见的无线传感器网络时间同步协议。
在这种协议中,每个节点在发送消息时将当前时间戳附加到消息中。
接收方使用其本地时钟的当前值与时间戳比较以计算往返时延,并校准它的时钟。
该协议的优点是它的实现简单易用;缺点是由于时间戳的传输,它无法在所有情况下达到足够准确的时间同步。
2. 基于跳数的时间同步协议基于跳数的时间同步协议利用无线传感器网络中节点之间的跳数来进行时间同步。
假设网络中的所有节点都具有相同的无线电发射时间,并且在发出时间信号后,将该信号转发到所有相邻节点。
通过测量传输时间和跳数,节点可以确定其当前时间偏差,并进行时间同步。
该协议需要更高的能量消耗以维护节点之间的同步。
3. 时钟插值算法时钟插值算法是一种通用的时间同步方法,它使用数学插值来改进节点时钟的准确性。
它的基本思想是,每个节点保留它在本地的最后一次时间同步,然后通过使用两个时间同步点之间的本地振荡分组来估计其本地钟差。
这种方法需要节点能够记录更多的历史时间同步信息,并需要更复杂的算法来计算时钟偏差。
4. 时间同步协议中的校准方法为了提高时间同步协议的准确性,一些校准方法被加入其中,例如跨层反馈校准、以及基于信号速率不变性原则的校准方法。
这些校准方法可以帮助减少噪声和误差,提高时间同步协议的准确性和可靠性。

无线传感器网络的时间同步与时钟校准方法无线传感器网络(Wireless Sensor Network, WSN)是由大量分布在空间中的无线传感器节点组成的网络系统。
这些节点可以通过无线通信互相连接,协同工作以完成各种任务。
在无线传感器网络中,时间同步和时钟校准是非常重要的问题,对于网络的性能和可靠性有着直接的影响。
时间同步是指在无线传感器网络中,使得各个节点能够按照相同的时间标准进行操作。
这样可以实现节点之间的协同工作,提高整个网络的效率。
而时钟校准则是指将每个节点的本地时钟与全局时间进行校准,以保证节点之间的时间一致性。
目前,有许多时间同步和时钟校准的方法被提出和应用于无线传感器网络中。
其中,最常用的方法之一是基于时间戳的同步方法。
该方法通过在数据包中添加时间戳的方式,使得接收节点可以获取发送节点的发送时间,从而实现时间同步。
然而,由于无线传感器网络中节点的能源和计算能力有限,时间戳同步方法往往会带来较大的能耗和时延。
为了解决时间戳同步方法的问题,一些新的同步方法被提出。
其中之一是基于声波的同步方法。
该方法利用节点之间的声波通信,在网络中广播时间信号,从而实现时间同步。
由于声波传播速度较慢,节点之间的距离可以忽略不计,从而减小了能耗和时延。
此外,基于声波的同步方法还可以提供更高的精度和稳定性,适用于一些对时间要求较高的应用场景。
除了时间同步,时钟校准也是无线传感器网络中的重要问题。
时钟校准的目的是使得每个节点的本地时钟与全局时间保持一致,以避免时间误差对网络性能的影响。
目前,常用的时钟校准方法有两种:硬件校准和软件校准。
硬件校准是通过使用高精度的时钟源来校准节点的本地时钟,例如GPS信号。
然而,由于硬件成本较高,硬件校准方法在实际应用中并不常见。
相比之下,软件校准方法更加灵活和经济。
该方法通过网络中的节点之间相互协作,根据时间同步的结果来校准本地时钟,从而实现时钟的校准。
总的来说,无线传感器网络的时间同步和时钟校准是保证网络性能和可靠性的关键问题。
无线传感器网络时间同步随着无线传感器网络的快速发展,大规模部署的传感器节点数量急剧增加。
无线传感器网络中的各个节点通常需要协同工作,因此对节点之间时间的同步非常重要。
只有实现了精确可靠的时间同步,无线传感器网络才能更加高效地运行。
一、时间同步的重要性时间同步在无线传感器网络中起到了至关重要的作用。
首先,时间同步可以协调不同节点之间的工作,确保节点以协同的方式进行数据收集、传输和处理。
其次,时间同步可以帮助节点进行协调的能量管理,使得节点在执行任务时能够更好地平衡能量消耗。
此外,时间同步还可以提供对网络中事件发生时间的准确标记,帮助我们更好地分析和理解网络中的行为与现象。
二、常见的时间同步方法在无线传感器网络中,存在多种时间同步方法。
以下是其中几种常见的方法:1. 基于全局时间的同步方法基于全局时间的同步方法借助于一个时间参考节点,将全局时间广播给其他节点。
时间参考节点通过自身的晶振等方式获得准确的时间信息,并将其通过广播方式传输给其他节点,达到时间同步的目的。
2. 基于邻近节点的同步方法基于邻近节点的同步方法不依赖于全局时间,而是通过与邻近节点之间的通信来进行时间同步。
该方法通过相互之间的通信,以及传输延迟计算方法,实现了节点之间的时间同步。
3. 基于时间戳的同步方法基于时间戳的同步方法通过给每个节点分配一个相对于一个参考节点的时间戳,来实现节点之间的时间同步。
节点通过与参考节点进行通信,获取参考节点的时间戳,并根据传输延迟等因素进行时间纠正,最终实现时间同步。
三、时间同步的挑战与解决方案然而,实现无线传感器网络中的时间同步并非易事,会面临多种挑战。
以下是一些常见的挑战以及相应的解决方案:1. 传输延迟不确定性:无线传感器网络中的数据传输存在不确定性,传输延迟会受到各种因素的影响。
解决这个问题的方案可以采用时间戳校正和数据同步机制,以保证时间同步的准确性。
2. 能量消耗问题:时间同步需要节点之间频繁地进行通信,而通信会消耗节点的能量。

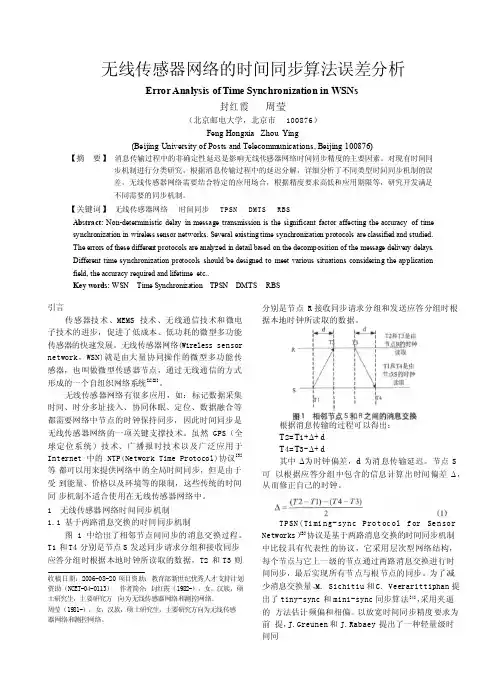
图 1 相邻节点 S 和 R 之间的消息交换(1) 无线传感器网络的时间同步算法误差分析Error Analysis of Time Synchronization in WSNs封红霞周莹(北京邮电大学,北京市 100876)Feng Hongxia Zhou Ying(Beijing University of Posts and Telecommunications, Beijing 100876)【摘 要】 消息传输过程中的非确定性延迟是影响无线传感器网络时间同步精度的主要因素。
对现有时间同步机制进行分类研究,根据消息传输过程中的延迟分解,详细分析了不同类型时间同步机制的误 差。
无线传感器网络需要结合特定的应用场合,根据精度要求高低和应用期限等,研究开发满足 不同需要的同步机制。
【关键词】 无线传感器网络 时间同步 TPSN DMTS RBSAbstract: Non-deterministic delay in message transmission is the significant factor affecting the accuracy of time synchronization in wireless sensor networks. Several existing time synchronization protocols are classified and studied. The errors of these different protocols are analyzed in detail based on the decomposition of the message delivery delays. Different time synchronization protocols should be designed to meet various situations considering the application field, the accuracy required and lifetime etc..Key words: WSN Time Synchronization TPSN DMTS RBS引言传感器技术、MEMS 技术、无线通信技术和微电 子技术的进步,促进了低成本、低功耗的微型多功能 传感器的快速发展。

无线传感器网络中的时间同步算法研究无线传感器网络(WSN)已成为一种广泛应用于各种领域的技术,如环境监测、农业、医疗保健等。
WSN 由大量的低功耗无线传感器节点组成,它们可以采集和传输环境数据,但是它们必须在时间上同步。
这是因为它们在数据传输和协议执行时必须遵守时间限制。
时间同步算法成为 WSN 中最重要的问题之一。
时间同步算法可以使 WSN 的节点具有相同的时间戳,以确保数据在整个网络中的一致性和准确性。
它们在各种应用程序中都是必不可少的,如追踪,定位,无线电源控制等。
在 WSN 中,时间同步算法可以分为两类:分布式算法和集中式算法。
分布式算法是每个节点在一组邻居节点上同步时间,而集中式算法是由集中的基础时间同步协调器(例如 GPS 卫星)向所有节点广播时间。
分布式时间同步算法使用局部信息来同步时间,这使得节点可以在不依赖中心化同步协调器的情况下实现同步。
这更适合在可靠性和可扩展性方面受限制的环境中使用。
这些算法可以分为三个类:时基、基于事件和混合。
时基同步算法的基本思想是使用全局时钟周期,这通常由在线时间同步的节点集合中的一些准确节点生成。
所有其他节点同步到这些节点,从而实现整个网络的时间同步。
这两个节点之间的同步是通过周期性地交换同步消息来实现的。
基于事件的时间同步算法采用事件触发模型。
当传感器节点检测到某些特定事件时,它们将发出时间消息,这些消息将跨节点传递。
通过比较消息的发送时间和接收时间,节点可以正确地计算整个网络的同步时间。
混合算法将时基和事件同步结合在一起。
在这种情况下,节点首先同步它们的时钟到某些参考节点,然后使用基于事件的同步来使它们的时钟更准确。
然而,在实际的 WSN 中,时间同步面临许多挑战。
每个节点的振荡器频率不同,因此在相同的时间内,它们的时间戳也有所不同。
此外,传输延迟、消息丢失和节点故障等因素也会影响时间同步的准确性。
为了克服这些问题,近年来已经提出了很多新的时间同步算法。
无线传感器网络的时间同步与时钟漂移校准方法研究无线传感器网络是一种由许多无线传感器节点组成的分布式网络系统,其具有自主感知、自组织和自适应等特点,在许多领域都有广泛的应用。
在无线传感器网络中,节点之间的时间同步与时钟漂移校准是保证网络正常运行的重要问题。
本文将探讨无线传感器网络的时间同步与时钟漂移校准方法的研究。
时间同步是指无线传感器网络中各个节点通过某种方法将自己的时钟与其他节点的时钟同步,以保证节点之间的协同工作和数据收集的准确性。
时间同步在无线传感器网络中有着重要的意义。
首先,时间同步可以实现数据的时序关联,使得节点之间可以准确地进行数据交互和协同处理。
其次,时间同步可以提高无线传感器网络的能量效率。
节点之间的时间同步可以避免冲突和能量浪费,从而延长网络的寿命。
此外,时间同步还可以提供准确的事件触发和时间戳,为网络中的事件定位和数据分析提供支持。
在无线传感器网络中,节点之间的时钟存在着不同程度的时钟漂移。
时钟漂移是指节点时钟的频率偏差,也就是实际时钟与真实时钟之间的差异。
时钟漂移对于时间同步和数据收集的准确性有着重要影响。
如果时钟漂移不能得到准确的校准,将导致网络中数据的误差累积,进而影响节点之间的通信和协同工作。
目前,针对无线传感器网络的时间同步与时钟漂移校准问题,已经提出了许多研究方法和算法。
下面将介绍其中两种常见的方法:网络全局时间同步和分布式时间同步。
网络全局时间同步方法是指通过一个或多个专门的节点将网络中的所有节点之间的时钟同步。
这种方法可以确保网络中的所有节点具有相同的时间参考,从而实现严格的时间同步。
其中最常用的方法是基于时间源的同步方法。
在这种方法中,一个节点被选为时间源,并向其他节点广播自己的时间信息。
其他节点通过接收时间源节点的信号进行时钟同步。
时间源节点可以是网络中的某个特定节点,也可以是多个节点的组合。
此外,还有一些基于无线信道延迟和节点距离的时间同步方法。
这些方法通过测量节点之间的无线信道延迟和节点之间的距离来实现时钟同步。
无线传感器网络中的时间同步方法无线传感器网络(Wireless Sensor Networks,WSN)是由大量部署在被监测区域内的无线传感器节点组成的网络。
这些节点通过无线通信协作工作,收集、处理和传输环境中的信息。
时间同步是WSN中的一个关键问题,它可以确保节点之间的时间一致性,提高网络性能和能源效率。
本文将介绍一些常用的无线传感器网络中的时间同步方法。
一、基于全局时间同步的方法基于全局时间同步的方法是通过引入一个全局时间参考来实现节点之间的时间同步。
其中,GPS是最常用的全局时间参考。
节点通过接收GPS信号来获取准确的时间信息,并进行时间同步。
然而,GPS信号在室内或者复杂的环境中可能受到干扰,导致时间同步的不准确。
因此,基于全局时间同步的方法在某些特殊环境下可能并不适用。
二、基于局部时间同步的方法基于局部时间同步的方法是通过节点之间相互协作来实现时间同步。
其中,最常用的方法是基于邻居节点的时间同步。
节点通过与邻居节点进行通信,交换时间信息,并根据接收到的时间信息进行时间同步。
这种方法不依赖于全局时间参考,适用于无法获取准确全局时间的环境。
然而,由于节点之间的通信可能受到信号传输延迟等因素的影响,导致时间同步的误差增大。
三、基于时钟漂移的方法基于时钟漂移的方法是通过测量节点时钟的漂移率来实现时间同步。
节点的时钟可能存在一定的漂移,即时钟的频率与真实时间的频率不完全一致。
通过测量时钟的漂移率,节点可以根据漂移率对时间进行校正,从而实现时间同步。
然而,由于节点时钟漂移率的变化可能受到温度、电压等因素的影响,导致时间同步的准确性降低。
四、基于事件驱动的方法基于事件驱动的方法是通过节点之间的事件触发来实现时间同步。
节点在收到某个事件触发信号后,记录下该事件发生的时间,并将该时间信息传递给其他节点。
其他节点根据接收到的事件时间信息进行时间同步。
这种方法不依赖于全局时间参考和时钟漂移,适用于无法获取准确全局时间和时钟漂移率的环境。
文章编号: 1673 9965(2010)06 560 05无线传感器网络多跳时间同步算法*侯宏录1,杨朋伟2,谢矿生2,胡民效2(1.西安工业大学光电工程学院,西安710032;2.武警西安指挥学院教研部,西安710038)摘 要: 针对多跳网络中同步误差累积和同步开销大的问题,提出了一种最优拓扑结构的时间同步算法.通过构造最优拓扑结构和在网络节点之间传递时间同步报文来减小累积误差和时间同步开销.借鉴无线传感器网络时间同步延迟测量算法的打时间戳技术进行时间偏差估计来提高时间同步的精度.应用结果表明:在具有33个节点的传感器网络中,相比无线传感器网络时间同步协议算法,该算法的时间同步开销减小了2/3,引起累积误差的关键路径长度减小了1/2.关键词: 最优拓扑结构;时间同步;关键路径;无线传感器网络中图号: T P301.6 文献标志码: A传统的传感器网络时间同步算法有参考广播同步(Reference Bro adcast Sy nchr onization,RBS)算法[1]、无线传感器网络时间同步协议(T iming Sync Protocol for Sensor N etw orks,T PSN)算法[2]、FT SP[3](Flooding Tim e Synchronization Pro to col)算法、基于累计时延统计的传感器网络数据同步算法[4]以及基于连通支配集的时间同步算法[5].这些算法都采用提高单跳同步精度、采用最短路径同步以减少跳数,降低多跳误差累积,却没有充分利用周围节点的时钟信息以降低误差随跳数累积的速度.另外这些算法为了提高时间同步的精确度,节点之间信息交换的次数比较多,因此同步开销和节点功耗较大.基于连通支配集的时间同步算法通过在支配节点之间传递时间同步报文,非支配节点只接收时间同步报文,从而实现时间同步,由于只有支配节点发送时间同步报文,该算法大大减少了时间同步开销,但是,该算法仍然存在着较大的累积误差,在网络规模较大时这种情况更加明显.为更好的减小累积误差,受到基于连通支配集的时间同步算法的启发,考虑到通过构造最优拓扑结构的方法来减小时间同步过程中关键路径的长度,从而实现减小累积误差和减少时间同步开销.受到无线传感器网络时间同步延迟测量(Delay M easurement Time Synchronizatio n for Wireless Sensor Netw orks,DM TS)算法打时间戳技术的启发,以及研究时间同步报文在传感器网络中的传播规律,通过在MAC层进行标记时间戳及应用累计时延统计方法来进行时延估计,从而及时调整和更正错误的时间包信息,以减小累积误差,进而实现时间的精确同步.文中通过构造最优拓扑结构及时 估计的方法实现了全网节点的时间同步.设计了一种低同步开销及低累计误差的时间同步算法.1 传感器网络多跳时间同步算法算法的基本思想是通过构造拓扑结构和借鉴DM TS算法的打时间戳技术,在拓扑结构中传递时间同步报文以实现整个网络中节点的时间同步.1.1 相关概念定义定义1 (相邻节点)给定图中的两个节点,若第30卷第6期 西 安 工 业 大 学 学 报 V ol.30N o.6 2010年12月 Jo ur nal of X i an T echno lo gical U niver sity Dec.2010*收稿日期:2009 05 05基金资助:国防基础预研项目(B2220061084)作者简介:侯宏录(1960 ),男,西安工业大学教授,主要研究方向为光电检测技术、智能控制、复杂系统建模仿真及效能评估.E mail:hlhou@.存在一条边连接这两个节点,称它们为相邻节点.定义2 (节点的度数)一个节点在整个图中的邻居节点的个数定义为该节点的度数.定义3 (相邻节点集)给定图中的一个节点,它的所有邻居节点的集合定义为它的相邻节点集.定义4 (区域)给定图中的任意一个节点,它的相邻节点集和它本身的并集定义为区域.定义5 (一跳联系)对于任意两个节点来说,如果其中一个是另一个的邻居节点成立,则称它们构成一跳联系.定义6 (二跳联系)对于任意两个节点来说,如果它们不构成一跳联系,并且它们的邻居节点存在交集,则称这两个节点构成二跳联系.1.2 区域簇首节点集给定一网络拓扑结构,在进行算法之前,每个节点必需获得:相邻节点的有关信息;!相邻节点的个数信息;∀相邻节点的度数信息.这些信息可以通过各节点周期性地与自身的邻居节点交换信息获得.求区域簇首节点集的具体算法过程为开始,初始化拓扑结构.!求所有节点的度.∀求度最大的节点,定义为区域簇首节点,并记录下它的邻居节点集.#在余下的节点中继续求度最大的节点,判断此节点是否是前面区域簇首节点的邻居节点,如果是,确定它的邻居节点集(去掉它的区域簇首节点及所有区域簇首节点的邻居节点).否则的话,确定它的邻居节点集(去掉它的区域簇首节点的所有邻居节点).∃继续执行上一步,直到最后一个度最大节点记录的邻居节点个数为0为止.%算法结束.得到的区域簇首节点的集合称为区域簇首节点集.1.3 求支配节点集首先根据1.2可以得到网络拓扑结构的区域簇首节点集.从区域簇首节点集的第一个元素开始,每个元素可与它后面的所有元素建立一跳或二跳联系,根据区域簇首节点和区域簇首节点之间的联系建立新的拓扑结构.求支配节点集的具体算法过程为开始,初始化拓扑结构.!求拓扑结构的区域簇首节点,并将其存放在指定的数组中.∀从区域簇首节点集的第一个元素开始,寻找后面与它构成一跳联系的所有区域簇首节点,并将这些节点和这个区域簇首节点建立联系.#寻找这个区域簇首节点与它构成二跳联系的所有区域簇首节点,求这个节点和它的二跳关系节点的共同邻居节点中度最大的一个,用这个度最大节点把这个区域簇首节点和其二跳关系节点建立联系.∃执行完上面的步骤后,形成了一个网络拓扑结构,将这个拓扑结构中原来构成一跳联系的节点连接起来,进而形成了一个新的网络拓扑结构,称它为支配节点网络拓扑结构,这个支配节点网络拓扑结构中的节点定义为支配节点.%转向∀,重复,直到最后一个支配节点网络拓扑结构为链状为止.&算法结束,所有支配节点网络拓扑结构中的节点为支配节点,初始网络拓扑结构中的其他节点称为非支配节点.1.4 最优拓扑结构的构造定义M为拓扑层数,N为链状拓扑结构路由跳数.X为第倒数第二层支配节点网络拓扑结构中簇首节点的个数.根据1.3过程可求出网络拓扑结构的支配节点集及各级支配节点网络拓扑结构,接下来构造最优拓扑结构.具体过程为根据各级支配节点网络拓扑结构计算拓扑层数M和链状支配节点网络拓扑结构路由跳数N,进而计算关键路径长度,关键路径长度=(M-1)+(N/2+1).!判断M和N/2+1的关系,如果M>=N/ 2+1,转向∀;如果M<=N/2+1,转向#.∀让链状结构中的中间节点作为根节点,两边节点作为子节点,构造一层树状结构,然后前面支配节点拓扑结构构造一层拓扑结构,依此类推,可实现构造最优拓扑结构(在最优拓扑结构中去掉重复的节点),转向∃.#构造低一级的最优拓扑结构:首先,构造X 级的树状拓扑结构,在倒数第二层支配节点网络拓扑结构的簇首节点集中找度最大的那个簇首节点,联合其子节点构成一个树结构1,称为独立树结构.接着找度最大的簇首节点(除去属于树结构1的那些子节点),若存在则构造树结构2,若不存561第6期 侯宏录等:无线传感器网络多跳时间同步算法在,则根据已有的树结构给其添加子节点(子节点为(M -1)层拓扑结构的簇首节点),直到分配完所有的节点为止.根据(M -1)层拓扑结构的拓扑关系,继续给树结构添加叶子节点,树结构1和树结构2的公共交点可获得,任取一个作为根节点,构造X 级的树状拓扑结构.若独立树结构为三个,则依照上面的办法求三个树结构的公共交点作为根节点,可构造相应的树状拓扑结构.依次类推,最终可实现构造X 级的树状拓扑结构.其次,根据上面所求的X 级树状拓扑结构作为第一层拓扑结构,然后上一层支配节点拓扑结构构造第2层拓扑结构,依次类推,可以构造成(M -1)∋(N /2+1)级最优拓扑结构,转向∃.∃算法结束.1.5 时间同步的实现通过最优拓扑结构的根节点广播时间同步报文启动同步阶段,第一层拓扑结构中的节点收到这个报文后,估算时间延迟等参数并调整自己的逻辑时钟值,然后更新并转发这个同步报文,更新方法参考基于累计时延统计的传感器网络数据同步算法.第二层拓扑结构中的节点收到同步报文后,仅仅估计时间延迟等参数并调整自己的时钟值以达到与其簇首节点同步,依此类推,最终可实现所有节点与根节点的时间同步.2 算法性能分析2.1 时间同步开销和累积误差的比较同步开销用发送信令包和接收信令包的次数来衡量.设广播域内有1个时间基准节点,n 个接收节点,RBS 算法需要k 个时间记录以完成线性拟合,RBS 算法的同步开销为k(n +1)个发送信令包和k(n +1)个接收信令包.TPSN 算法的同步开销为2n 个发送信令包和2n 个接收信令包,而本算法的同步开销为m(m 为簇首节点的个数)个发送信令包和n -1个接收信令包.若采用最小连通支配子集算法,同步开销为L (L 为最小连通支配节子集中节点的个数)个发送信令包和n -1个接收信令包.关键路径的长度决定了累积误差的大小,可以很容易求得各种算法的关键路径长度,因此用关键路径长度来衡量累积误差.2.2 算法分析在大规模无线传感器网络中,时间同步技术变得尤为重要,数据融合、广播认证、节点定位、时分多路复用、节点状态切换等均依赖于全网节点的时间同步.缺乏有效的时间同步机制,无线传感器网络难以为用户提供有效服务.传感器网络中每个节点采用晶体振荡器来维持本地时钟,由于晶体振荡器的频率存在偏差,以及外界环境(如温度、压力的变化和电磁波的干扰)的影响,在运行一段时间后,传感器网络往往会产生时间漂移和时间偏移.当传感器网络中网络节点数目增加时,时间漂移和时间偏移会急剧增大,使得实现时间同步变得很困难.为解决这一问题,通过构造最优拓扑结构以及研究时间同步报文在网络中的传播规律,文中算法实现了全网节点的时间同步.实验验证:当网络规模增大时,文中算法的时间同步开销相比较于T PSN 算法的时间同步开销急剧减小,关键路径长度相比较于TPSN 算法的关键路径长度也急剧减小,在给定传感器网络中,力求寻找时间同步报文传播的最佳路径,因此取得了明显的效果.3 应用举例3.1 应用举例文中利用一个传感器网络环境的实例来说明算法实现的给定初始网络拓扑结构,如图1所示.图1 拓扑结构图Fig.1 T he to po log y ma p在图1中有33个网络节点,每个网络节点代表一个具有数据采集、数据处理及数据传输功能的智能传感器网络节点,这样的节点可以分为三类:终端节点、路由器节点以及协调器节点,它们分别实现不同的功能.在图1中,相邻节点之间通过实线连接,表示可以进行时间信息交换,没有实线连562西 安 工 业 大 学 学 报 第30卷接的节点不能进行时间信息交换.由于在实际应用中节点的部署是任意的,因此本文给出的传感器网络拓扑结构具有任意性,仅作示例.3.2 求各级支配节点根据1.3中的方法可以得到给定网络拓扑结构的各级支配节点.通过计算第一层支配节点为3,4,7,8,11,12,14,15,19,20,21,25,27;第二层支配节点为7,8,11,20.各层支配节点根据1.3中的方法可以形成各自的支配节点网络拓扑结构.3.3 构造最优拓扑结构实现时间同步根据1.4中的方法可以构造最优拓扑结构,如图2所示.根据1.5中的方法可实现全网节点的时间同步,在图2中,首先由根节点11广播时间同步报文启动同步阶段,第一层拓扑结构中的节点7,8,20收到这个同步报文后,估算时间延迟等参数并调整自己的逻辑时钟值,然后修改并转发同步报文.依此类推,支配节点通过接收其父节点的时间同步报文实现时间同步,并转发时间同步报文;非支配节点通过接收其簇首节点的时间同步报文进行时间同步,最终所有节点都同步到根节点11.图2 最优拓扑结构F ig.2 Optimal topolog y3.4 算法性能比较在表1中,结合实例,列举了RBS 算法、T PSN 算法及本算法实现全网节点时间同步的关键路径长度、发送信令包数及接收信令包数.表1 文中算法与RBS 算法、T P SN 算法性能比较T ab.1 T he perfo rmance co mpar ison of the art iclealg or ithm and RBS,T PSN alg or ithm参数R BS 算法T PSN 算法文中算法关键路径长度/跳884发送信令包数/个32k 6212 表1中k 为RBS 算法完成数据线性拟合的时间记录个数,关键路径长度用网络路由跳数来衡量.从表1中看出:相比RBS 算法及TPSN 算法,文中算法实现全网节点时间同步的关键路径长度、发送信令包数及接收信令包数都明显减小.4 结论由于时间漂移、温度以及压力等因素的影响,传感器网络中节点的本地时间和全局时间之间存在时间偏差,随着时间的推移,这种时间偏差会逐渐增大.为了减小时间偏差,文中采用构造最优拓扑结构,以及在M AC 层进行标记时间戳的方法实现了全网络节点的时间同步.应用结果表明该算法明显减小了时间同步偏差,主要表现在:1)最大限度减少了时间同步信息包在传递过程中的冗余信息,只选择关键的、必须的路径进行传递信息,从而降低了能耗;2)在同步信息包的传递过程中,考虑时延估计,以便及时调整和更正错误的时间同步信息包,从而提高了同步算法精度;3)相比RBS 算法和TPSN 算法,其时间同步开销和时间累积误差都急剧减小.尽管如此,时间同步技术还需要继续改进,在下一步的研究中,将开展对钟频率偏差补偿及多次时间信息数据参数估计的研究.参考文献:[1] Elso n J,G iro d L ,Estrin D.Fine g rained N etw orkT ime Sy nchro nizat ion U sing Reference Br oadcasts [C]//Pr oceeding s o f the 5th Sy nposlum o n O per atio n Sy stems Design and Implementatio n(OSDl2002),Boston,M A,2002:147.[2] Ganeriwal S,Kumar R,Sriv ast av a M.T iming Sy ncP roto col for Sensor Netw o rks [C]//Pr oceeding of 1st Inter national Conference o n Embedded N et wo rked Sensor Sy stems,L os Ang eles,2003:138.[3] M ar oti M ,K usy B,Simo n G,et al.T he F lo odingT ime Sy nchro nization Pro toco l[C]//P roceedings of the 2nd ACM Conference on Embedded N et wo rked Senso r Sy stems (SenSy s ),Baltimo re,M ar iland,2004:39.[4] 赵大胜,杨宗凯,王玉明,等.基于累计时延统计的传感器网络数据同步算法[J].华中科技大学学报:自然2005,33(7):26.563第6期 侯宏录等:无线传感器网络多跳时间同步算法ZH A O Da sheng,Y A NG Zo ng kai,WA N G Yu ming, et a l.Accumulative based Delay Stat istics for DataSynchronizatio n A lg or ithm W ir eless Senso r N etwo rk[J].J Huazho ng U niv of Sci&T ech:Natur e ScienceEditio n,2005,33(7):26.(in Chinese)[5] 彭伟,卢锡城.一种新的分布式最小连通支配集近似算法[J].计算机学报,2001,24(13):255.PENG Wei,L U Xi cheng.A N ov el Distr ibuted A p pro ximat ion Algo rithm for M inimum Connected Do m inating Set[J].Chinese Jo ur nal of Computer s,2001, 24(13):255.(in Chinese)Multi hop Time Synchronization Algorithm forWireless Sensor NetworkH OU H ong lu1,YA N G P eng w ei2,X I E K uang sheng2,H U M in x iao2(1.Scho ol of O pto electro nic Eng ineer ing,Xi an T echnolog ical U niv ersity,X i an710032,China;2.Depar tment o f T eaching and R esear ch,Xi an Command Co llege of CA PF,Xi an710038,China)Abstract: T o so lve the pr oblem s of error acum ulation and overhead of tim e synchronizatio n,a new tim e synchro nization algor ithm w as pr opo sed based o n o ptimal topolog y.It can reduce the a cumulativ e erro rs and o ver head of time sy nchr onization thro ug h building the optimal topo logy and conveying the tim e synchro nization packet among those netw or k no des.The time synchronizatio n accuracy can be improved thro ug h estimating the time error,fro m the timestamp techno logy of DMT S algor ithm.The result show s that the sy nchronization o ver head can be reduced by2/3,and that the critical path length w hich causes the a cumulative err ors can be reduced by1/2.Key words: optim al topolog y;time synchronization;critical path;w ireless senso r netw o rk(责任编辑、校对 张立新)(上接第559页)Oxidation Kinetics of TP304and TP347Steels underthe High temperature Water vapour ConditionWA N G Zheng p in1,FEN G H ong f ei1,T AN G L i y ing2,J I N Yao hua1,YA O Yu hong1(1.School of M ater ials and Chemical Eng ineer ing,Xi an T echnolog y U niv ersity,Xi an710032,China;2.Xi an T her mal P ow er Research Institut e Co.,L td,X i an710032,China)Abstract: Ox idatio n kinetics of the TP347H and the TP304H steels under high temperature w ater vapour co ndition is studied by disco ntinuous w eighing.T he results indicate:the ox idatio n kinetics of the TP347H and the T P304H steels at560(,590(,620(and650(follow s parabolic equatio n( m= kt z);the oxidation resistance of T P347H is higher than that of TP304H;ox idation of the TP347H and the T P304H steel of increases as the temperature r ises;the ox idatio n speed of the TP347H and the TP304H steel increnses w ithin fro m590(to620(.Key words: T P347H steel;T P304H steel;high temperature w ater vapo ur;ox idation kinetics(责任编辑、校对 张立新) 564 西 安 工 业 大 学 学 报 第30卷。