基于Backstepping的飞行控制系统设计
- 格式:pdf
- 大小:279.87 KB
- 文档页数:4
基于Backstepping模糊自适应的四旋翼飞行器控制张硕;张学典;秦敏;陈征【摘要】针对四旋翼飞行器轨迹跟踪模型中所受到的外界扰动和参数不确定性等问题,设计了基于模糊自适应反步法的控制策略.在姿态系统中,利用反步法设计控制器,对系统中不确定函数部分采用模糊逻辑系统进行在线逼近.对飞行器运动轨迹进行了跟踪仿真,取得了较为理想的控制效果,验证了该方法的可行性.【期刊名称】《电子科技》【年(卷),期】2017(030)002【总页数】4页(P54-57)【关键词】模糊控制;四旋翼飞行器;非线性系统;反步法【作者】张硕;张学典;秦敏;陈征【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】V249.1;TP273+.4针对四旋翼飞行控制的研究已有很多经典的控制方法,例如自适应鲁棒方法、反步法、滑模控制方法、人工智能方法、以及优化方法等。
反步法(Backstepping)又称反向递推控制。
这种方法的主要设计思想是将多维非线性系统分解成多个子系统,并在每个子系统中设计虚拟控制律和Lyapunov能量函数,一直反推到最后一个子系统并完成真正的控制律的设计,通过构造的能量函数来最终保证系统稳定性和动态性能。
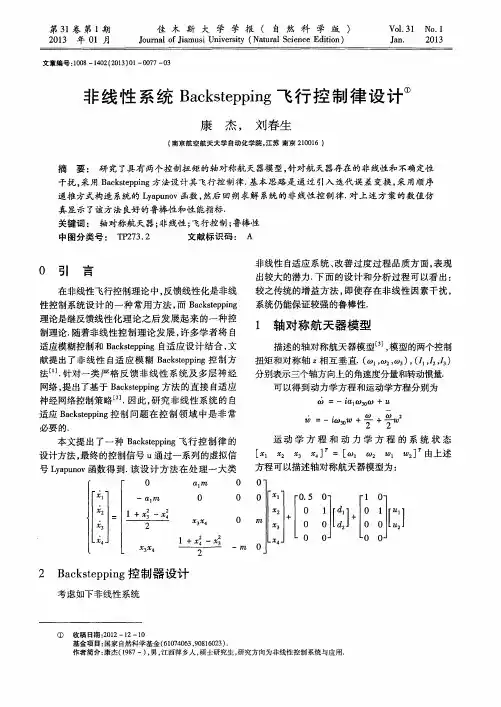
四旋翼飞行器在飞行时的姿态控制就是对3个姿态角(偏航角ψ,俯仰角θ,滚动角φ)的控制。
如图1所示,Rotor1是四旋翼飞行器的头部,Rotor3是尾部,Rotor4和Rotor2分别是左右翼,则ψ角是绕本体坐标系zb轴转动的偏航角,θ角是飞行器头尾部绕本体坐标系yn轴转动的俯仰角,φ角是飞行器左右翼绕本体坐标系xb轴转动的滚转角。
选取地面一点Oe作为原点,建立地面坐标系Oexeyeze,选取飞行器质点Ob作为原点,建立本体坐标系Obxbybzb。

基于非线性Backstepping的船舶动力定位控制算法研究黄珍;毕传林
【期刊名称】《舰船科学技术》
【年(卷),期】2018(0)2X
【摘要】船舶动力的定位控制属于是闭环控制系统,因风浪等一些环境产生的干扰,使船舶动力的定位控制存在不确定性的干扰控制问题。
当前算法对船舶的动力进行定位控制时没有对船舶的动力进行定位,导致船舶动力定位控制不准确的问题。
提出一种基于非线性Backstepping的船舶动力定位控制的算法。
对船舶动力定位控制的数学模型进行构建,利用非线性Backstepping反步积分的控制原理为基础,通过对Lyapunov函数递推进行2步船舶控制律进行构造,有效地提高了定位的精确度,由此完成对非线性Backstepping的船舶动力定位控制算法的研究。
实验结果证明,利用该算法使船舶动力定位控制的精确度较高。
【总页数】3页(P55-57)
【关键词】非线性;Backstepping;船舶动力;定位控制
【作者】黄珍;毕传林
【作者单位】九江职业技术学院信息工程学院,江西九江332007
【正文语种】中文
【中图分类】U664.82
【相关文献】
1.基于非线性模型预测的船舶动力定位控制器设计 [J], 王元慧;隋玉峰;吴静
2.基于非线性控制理论的船舶动力定位控制系统的数学模型 [J], 刘芙蓉;陈辉
3.基于迭代滑模的船舶动力定位非线性控制 [J], 陈海力;任鸿翔;杨柏丞;衣莹
4.基于非线性自适应控制器的船舶动力定位系统设计 [J], 吕莉;李艳
5.非线性Backstepping算法在船舶动力定位系统控制的应用 [J], 牛兴霞;章小丹因版权原因,仅展示原文概要,查看原文内容请购买。
基于Backstepping的严格反馈极值搜索系统控制器设计张雷;胡云安;张杨;王佩飞【摘要】针对一类含不确定参数的严格反馈型极值搜索系统的控制问题,将极值搜索方法和反演(Backstepping)控制方法相结合,设计出系统状态的极值参考轨迹,利用Backstepping控制方法逐步递推选取适当的Lyapunov函数设计控制器和不确定参数自适应估计律,实现目标函数的极值搜索。
仿真表明所提出控制器设计方法的有效性。
%To solve control problems of strict-feedback extremum seeking systems with uncertain parameter, extremum seeking control method and Backstepping control method were combined. System state extremum reference trajectory was designed. Backstepping controller and uncertain parameter adaptive estimation law were designed based on the appropri⁃ate Lyapunov functions selected by recurrence method, objective function extremum seeking was realized. Simulation re⁃sult showed that the proposed controller design method was effectiveness.【期刊名称】《海军航空工程学院学报》【年(卷),期】2016(031)004【总页数】6页(P401-406)【关键词】严格反馈;不确定参数;极值搜索系统;自适应估计律【作者】张雷;胡云安;张杨;王佩飞【作者单位】海军航空工程学院控制工程系,山东烟台264001;海军航空工程学院控制工程系,山东烟台264001;海军航空工程学院控制工程系,山东烟台264001;海军航空工程学院研究生管理大队,山东烟台264001【正文语种】中文【中图分类】TP273+.23实际控制系统中,系统的参考输出量与输入量之间通常可以构成某种未知的参考轨迹,这种参考轨迹关系意味着在参考输入的作用下,系统的输出轨迹中存在一个全局最优输出值(极大值或者极小值)[1-2]。
基于Backstepping的船舶航向自适应滑模控制王林;陈楠;高嵬【摘要】An adaptive sliding mode control algorithm based on backstepping is proposed for Norrbin nonlinear ship model.In the procedure,a disturbance compensator is designed to eliminate the influence of system disturbance.By means of Lyapunov function,it is theoretically proved that the control strategy may make the closed-loop system globally asymptotically stable,with tracking errors converging to zero.The discussed controller has better tracking capabilities and faster response rapidity than traditional proportional-integral-derivative(PID)controllers.%针对Norrbin非线性船舶运动数学模型,提出了一种基于Backstepping的自适应滑模控制策略。
为了消除外界扰动的影响,引入扰动估计器的设计方法,并借助Lyapunov函数证明了该控制器可以确保闭环系统渐近稳定,使系统的跟踪误差趋于零。
与传统的PID控制策略相比,具有较好的跟踪能力和较快的响应速度。
【期刊名称】《船电技术》【年(卷),期】2012(032)004【总页数】3页(P16-18)【关键词】船舶自动舵;外界干扰;Backstepping;滑模控制【作者】王林;陈楠;高嵬【作者单位】海军驻武汉701所军事代表室,武汉430064;91206部队,山东青岛266071;海军工程大学电气与信息工程学院,武汉430033【正文语种】中文【中图分类】TP2730 引言由于船舶的动态特性或外界条件不断地变化,使得船舶运动表现出非线性、不确定性、大滞后等复杂的动态特性,从而船舶航向控制的数学模型与扰动模型具有明显的不确定性,而以确定数学模型为基础的PID舵的设计就无法实现。
基于Backstepping方法的单元机组协调系统非线性控制摘要:火力发电单元机组的机炉协调控制系统(简称为协调控制系统)是一个复杂的多变量控制系统。
此系统难取得良好的控制品质的主要原因包括大时滞、强耦合、非线性。
针对非线性问题本文提出基于非线性的Backstepping方法,它的基本思想是通过逐步修正算法设计镇定控制器,在每一步把状态坐标的变化、不确定参数的调节函数和一个已知的Lyapunov函数的虚拟系统镇定函数联系起来,以实现系统的全局调节或跟踪。
关键词:协调控制系统 Backstepping 非线性控制动态特性;1引言协调控制系统(CCS)是为了适应当前电力的发展趋势而实施的单元机组控制方案。
它的控制对象为锅炉、汽轮机和发电机,它具有大时滞、强耦合、非线性,难以匹配的特点,是一个典型的MIMO对象。
随着非线性理论发展及其应用研究的逐步深入,机炉协调控制系统的非线性设计也受到广泛关注,相关的研究包括:反馈线性化方法、逆系统方法、反步法、多模型设计方法及增益调度方法等。
近年来,反步法在非线性控制界引起了高度的重视,它是一种非线性控制的设计工具,该方法通过引入虚拟控制变量,逐步设计偏差的能量函数,递推构造出系统的控制律,实现系统的全局调节或跟踪,使整个闭环系统满足期望的动静态性能。
本文采用基于非线性的Backstepping方法对协调控制系统进行控制器设计,简化了控制器设计过程。
2控制器的Backstepping设计2.1 单元机组动态特性[1,2]汽轮发电机组被控对象是本质非线性的,具有分布参数和时变特性。
机组动态特性除了受其内在的物理结构属性影响以外,还与机组的运行方式、运行工况、外部环境等因素有关。
因此,目前还难以得到对机组动态特性的精确描述,通过合理简化与近似处理,结合机理分析与试验建模这两种方法,建立起满足一定精度要求、反映机组主要动态特征的deMello模型[3]:(2-1)式中为机组输出功率;为主蒸汽调节阀开度(机侧控制量);为主蒸汽压力(主蒸汽调节阀前);为汽包压力;为锅炉吸热量;为进入炉膛的燃料量(炉侧控制量);为汽包蓄热系数;为蒸汽管道蓄热系数;k为蒸汽流动阻力系数;为锅炉燃烧与传热过程时间常数;为汽轮机与再热器时间常数;为比例系数;式(2-1)deMello模型反映了单元机组动态过程中存在的两个主要的非线性特性:(1)汽包压力和主蒸汽压力的压力降同汽包出口蒸汽流量存在平方根关系;(2)汽轮机功率同主蒸汽调节阀开度和机前压力的乘积成比例关系。
基于模糊滑模backstepping的半主动空气悬架设计孙丽颖;王君莹【摘要】为了研究半主动空气悬架系统对车辆行驶性能的影响,提出基于半主动空气悬架的模糊滑模backstepping控制.建立1/4二自由度半主动空气悬架动力学模型,用模糊逻辑系统逼近未知函数,解决了阻尼系数不易测的问题.该方法设计的控制器能够适应因车辆行驶状态或者环境发生改变而引起的系统参数在一定范围内的变化.仿真结果表明,与被动悬架相比,模糊滑模backstepping控制器对于提高半主动空气悬架系统减振效果更加明显.%In order to study the influence of semi-active air suspension system on vehicle traveling performance,a fuzzy sliding mode back-stepping control is proposed.Firstly,a 2-DOF quarter-car model for the semi-active air suspension system analysis is established.Then,the fuzzy logic systems are employed to asymptotically approach the unknown function and the problem that damping coefficient is uneasy to measure is solved.The controller designed in this method can be adapted to the change of the system parameters caused by the change of the vehicle traveling state or the environment within a certain range. The results show that, compared with passive suspension, the proposed fuzzy sliding mode back-stepping controller is more effective in improving the vibration reduction effect of the semi-active air suspension systems.【期刊名称】《噪声与振动控制》【年(卷),期】2018(038)001【总页数】5页(P109-113)【关键词】振动与波;半主动空气悬架;backstepping;滑模;模糊【作者】孙丽颖;王君莹【作者单位】辽宁工业大学电气工程学院,辽宁锦州121001;辽宁工业大学电气工程学院,辽宁锦州121001【正文语种】中文【中图分类】TP273悬架系统是维持车辆乘坐舒适性和操作安全性的最重要的部分之一,它能隔离路面冲击对车身的影响,从而保证车辆的行驶性能。
基于Backstepping-L1自适应控制的旋翼飞行器容错控制王焯;解武杰;张建业;董文瀚【摘要】针对旋翼飞行器控制过程中存在侧风等外界干扰、飞机本身存在未建模动态等不确定性,提出了一种基于Backstepping-L1自适应控制的旋翼飞行器容错控制方法.首先,在不考虑不确定性的情况下,根据旋翼飞行器的动力学方程和运动学方程,利用Lyapunov函数方法设计了基于Backstepping控制的姿态控制律,实现了闭环系统的稳定控制,且响应快速精确.其次,考虑不确定性对系统的影响,在Backstepping控制器的基础上,通过引入自适应律和状态观测器,实现对不确定性的实时估计和系统状态的在线观测,进而设计出具有鲁棒性的L1自适应控制器,消除了不确定性的影响,实现了旋翼姿态的容错控制.再次,通过引入一个闭环稳定的自治参考系统,对所设计的L1控制器进行稳定性分析,分析表明:设计的状态观测器跟踪误差有界并收敛到0,能够准确实时地估计被控系统状态;自适应律可快速自适应于系统存在的干扰及未建模动态等不确定性;控制律可以保证系统在正常状态及存在不确定性的情况下实时跟踪引入的参考系统,且跟踪误差趋近于0,从而保证系统稳定.最后,通过MATLAB仿真对比验证了该方法的有效性.%This paper presents a Backstepping-L1 adaptive control method aimed at the problems that there are outside interferences such as crosswind,etc.,and non-modeling dynamic uncertainties exist in aircraft itself in the process of flight for attitude control of multi-rotors.Firstly,according to the kinematics and dynamics equations of multi-rotors,the paper designs a Backstepping control law by a Lyapunov function under no consideration of uncertainties to realize a fast,accurate and stable control target.Then,under consideration of the influence of uncertainties,the paper introducesadaptive law and state predictor into the system on the basis of Backstepping controller.With the augmentations of adaptive law and state predictor,the real time estimation of uncertainties and online state prediction are realized.A L1 adaptive controller is designed to compensate the influence of uncertainties and make the system robustness and fault tolerant.And its stability analysis is realized by introducing a stable reference system.The analysis result shows that the statepredictor,adaptive law and control law can ensure the systemstable.MATLAB simulator is provided to demonstrate the performance of the presented control scheme.【期刊名称】《空军工程大学学报(自然科学版)》【年(卷),期】2017(018)006【总页数】6页(P8-13)【关键词】旋翼飞行器;Backstepping-L1自适应控制;容错控制;不确定性【作者】王焯;解武杰;张建业;董文瀚【作者单位】空军工程大学航空航天工程学院,西安,710038;空军工程大学航空航天工程学院,西安,710038;空军工程大学,西安,710051;空军工程大学航空航天工程学院,西安,710038【正文语种】中文【中图分类】V24;TP113近年来,随着航拍飞机等民用旋翼飞行器的广泛应用,旋翼飞行器的稳定控制受到了国内外研究人员的广泛关注[1-2]。
四旋翼无人飞行器反步法的控制陈奕梅;陈增辉;修春波【摘要】四旋翼无人飞行器是一种典型的六自由度的非线性、强耦合、欠驱动系统。
针对四旋翼无人飞行器Qball-X4受控模型的复杂非线性问题,从实际应用的角度出发,提出了一种在定点悬停情况下忽略偏航角变化的模型简化方法,有效地解决了内外环约束条件的求解问题,并基于此模型设计了一种基于反步法的渐近稳定控制器。
仿真结果表明:所设计的控制器能有效地实现定点飞行,同时,也验证了所建立的简化模型的合理性。
%Quadrotor unmanned aerial vehicle (UAV) is a typically nonlinear, underactuated and highly-coupled dynamical system with six degree of freedom. According to the complex nonlinear problem of Qball-X4 UAV controllable model, a model simplification method is proposed by ignoring the influence of the angle change of yaw when aerial vehicle keeps hovering at a certain point , and the problem of the constraints between inner and outer loops is effectively solved. A asymptotically stable controller is also designed through the backstepping algorithm based on the model. Numerical simulations are provided to illustrate the effectiveness of the proposed method, si-multaneously, the rationality of the simplified model is also verified.【期刊名称】《天津工业大学学报》【年(卷),期】2015(000)005【总页数】5页(P32-36)【关键词】四旋翼无人飞行器;欠驱动系统;反步算法;渐近跟踪【作者】陈奕梅;陈增辉;修春波【作者单位】天津工业大学电气工程与自动化学院,天津 300387;天津工业大学电气工程与自动化学院,天津 300387;天津工业大学电气工程与自动化学院,天津 300387【正文语种】中文【中图分类】TP271.72;TM755;V249.122四旋翼无人飞行器能够完成悬停、低速飞行、垂直起降和室内飞行等动作,具有固定翼无人机无法比拟的优势.同时,以其制造精度要求低、稳定性好、陀螺效应弱的特点,在军用、民用、商用等领域存在着强大的应用潜力,成为近年来的一个研究热点问题[1].在飞行器的非线性控制中,反步法(backstepping)作为一种有效的控制方案受到了关注.文献[2-3]都使用了反步法得到了较好的仿真效果,但在控制器中引入了代数环.文献[4-5]虽然克服了代数环,但姿态和位置的超调值略大,控制效果不理想.因此,这些仿真结果都很难用于实际控制系统.本文以Qball-X4四旋翼无人飞行器为研究对象,从控制器的实用角度出发,根据实验中飞行器定点飞行的特点,提出了一种模型简化方法,在该模型的基础上,得到了控制系统的内外环的约束条件,并设计了基于反步法的稳定控制器,最后在实验中验证了约束条件的合理性.同时,在反解电机PWM值的过程中,加入一阶低通滤波环节,防止四旋翼无人飞行器在实际飞行过程中因电机PWM值畸变而出现跑飞现象.四旋翼无人飞行器是一个典型的四输入六输出的非线性、强耦合、欠驱动系统,呈刚性的十字交叉结构,其4个电机分别均匀对称安装在十字结构的末端.飞行中通过调节4个电机的转速来控制4个电机的升力,以完成飞行器各个飞行姿态的转换.4个电机分左右、前后2组,且2组电机转向相反[6].图1为实验室使用的QUANSER公司的Qball-X4飞行器的实物图.在图中机体坐标系中,定义θ为俯仰角(Pitch)、φ为滚转角(Roll)及ψ偏航角(Yaw),并且,φ∈(-仔/2,仔/2),θ∈(-仔/2,仔/2),ψ∈(-仔/2,仔/2)[7].结合 Qball-X4四旋翼无人飞行器电机结构和力学知识可知:式中:U1为电机产生升力fi(i=1,2,3,4)的合力;K为电机模型的正增益系数;ω为电机的带宽;ui(i=1,2,3,4)为电机PWM输入;s为频域,s=jwt. 考虑到四旋翼无人飞行器的飞行特点,从简化问题复杂性的角度出发,文献[8]提出以下假设:(1)视飞行器为一个刚体,结构均匀对称;(2)在四旋翼无人飞行器飞行过程中,忽略旋翼的弹性形变及震动;(3)机体坐标系原点与四旋翼无人飞行器质心原点完全重合;(4)认为地面坐标系为惯性坐标系,忽略地球的曲率及自转;(5)考虑室内无风和慢速飞行,忽略风的阻力系数.基于上述假设,建立常规四旋翼无人飞行器的数学模型[9];式中:(x,y,z)代表飞行器相对于地面直角坐标系下的位置;m为飞行器的质量;Ix、Iy、Iz分别为飞行器本体绕机体坐标系x、y、z轴的惯性矩;l为机体中心到电机中心轴的长度.为了便于仿真和下面控制器的设计,引入U2=f4-f2,U3=f3-f1,U4=Ky·(u1+u3-u2-u4)与式(1)中的U1共同构成4个模拟输入量[10].由Qball-X4四旋翼无人飞行器结构严格对称的特点可知,姿态环中姿态角ψ通道是相对独立的,为了更好地维持飞行器飞行的姿态稳定,给期望的ψcmd=0,由于在定点飞行过程的实验中,实际偏航角始终在期望值附近变化,因此ψ≈0.在此基础上,对飞行器的数学模型进行合理简化,简化后的四旋翼无人飞行器模型为:2.1 模型变换由上述数学模型可知,姿态角和角速度不依赖线运动,而线运动的位置空间变化却依赖角运动,角运动与线运动之间存在着半耦合的关系[11].因此,将整个四旋翼无人飞行器控制系统分为内环(姿态环)和外环(位置环),控制器的设计包含了对姿态环和位置环2个子控制器的设计[12].系统的结构控制图如图2所示.其中:(xcmdycmdzcmd)为期望的位置输入;(φcmdθcmdψcmd)为期望的姿态输入.取状态变量由(3)式得:2.2 四旋翼无人飞行器姿态环控制器设计由(4)式可得滚转通道方程的表达式为:给定期望滚转角φcmd=x1d,定义误差变量e1=x1dx1,等式两边同时求导得:引入虚拟控制量α1,定义误差变量首先,取Lyapunov函数,对其求导,进一步,选取Lyapunov函数沿系统(5)求导得:将(5)、(6)、(8)式分别代入(10)式得到:取式中:c2>0,得到对于所有的e1≠ 0,e2≠0,V˙2<0.由Lyapunov稳定性可知,系统(5)在控制量(12)式的作用下渐近稳定.同理,取期望俯仰角θcmd=x3d,期望偏航角ψcmd=x5d,且定义e3=x3d-x3,e5=x5d-x5,则可以求得:俯仰通道:偏航通道:2.3 四旋翼无人飞行器位置环控制器设计Z通道方程表达式为:令期望高度zcmd=x7d,引入误差变量e7=x7d-x7,对误差变量求导得取虚拟控制量α7,并定义首先,取Lyapunov函数,求导得进一步,取Lyapunov函数将其沿(15)式求导,得:将(15)、(16)、(18)式带入(20)式得到:式中:c8>0,得到在平衡点外负定,则系统(15)渐近稳定.取X位置通道期望xcmd=x9d,Y位置通道期望ycmd=x11d,且定义e9=x9d-x9,e11=x11d-x11,则同理可以求得:2.4 非线性约束条件由上面的设计过程可知,整个控制器的设计分为了姿态控制器和位置控制器2部分,内环姿态控制器作用是调整四旋翼无人飞行器在飞行过程中姿态角的变化,外环位置控制器的作用是控制飞行器按照期望的轨迹飞行.飞行器的6个期望位姿中,已知条件只给出其中的4个,即xcmd、ycmd、zcmd和ψcmd.而另外2个期望的姿态角θcmd和φcmd是通过如下内环与外环的之间的非线性约束条件[13]得到.反解推导出期望姿态角为:基于上述设计过程,搭建仿真模型,为了验证模型简化后反步法控制算法的有效性和可行性,进行了Matlab仿真.设定四旋翼无人飞行器飞行的起始位置坐标(x y z)=0 m,起始姿态角(φ θ ψ)=0 rad,期望位置坐标为(xcmdycmdzcmd)=(1 1 1)m,期望偏航角ψcmd=0 rad,仿真时间t=10 s.模型中的其他参数如表1所示.控制器在(22)式、(12)-(14)式的作用下,四旋翼无人飞行器一系列仿真结果如图3—图6所示.由多次试验结果对比可知,当ci的值越大,(i=1,2,3,4,5,6,7,8,9,10,11,12),位置和姿态角的响应速度越快,同时,位置和姿态角的超调量也将越大.考虑实际飞行中的安全因素,取ci=1.5,cj=1,(i=1,2,3,4,5,6,7,8;j=9,10,11,12),图3和图4所示的位置和姿态角的超调量较小,在仿真时间内,都能够趋于期望目标,从而证明了反步法控制算法在该四旋翼无人飞行器模型中的有效性和稳定性.进一步,从图4中可以看出,偏航角始终保持在平衡点位置,即ψ≈0,从而验证了模型简化条件的合理性.在实际飞行过程中因为电机PWM值畸变,很容易导致飞行器跑飞的现象.从安全角度考虑,在反解求电机PWM的过程中,给4个虚拟输入都加了1个一阶低通滤波环节5/(s+5),得到的图5中4个电机PWM曲线才更加平滑.从图6中可以看出,四旋翼无人飞行器在定点飞行过程中的轨迹是比较平滑的,符合实际飞行的需求.本文以四旋翼无人飞行器为研究对象,在一定合理的假设前提下,对四旋翼无人飞行器在运动学和动力学方面展开分析,并建立了四旋翼无人飞行器的常规数学模型,在实际控制过程中进一步简化模型,利用Lyapunov稳定判据,结合Backstepping控制算法对控制器进行设计,并对四旋翼无人飞行器的位置和姿态进行了仿真.仿真结果显示Backstepping控制算法可以满足四旋翼稳定性要求.下一步将对该控制器用于飞行器实物进行性能测试.【相关文献】[1]王福超.四旋翼无人飞行器控制系统设计与实现[D].哈尔滨:哈尔滨工程大学,2013.[2]BAVISKAR A,FEEMSTE M,DAWSON D,et al.Tracking control of an underactuated unmanned underwater vehicle[C]// Proceedings of the American Control Conference.Portland:[s.n.],2005:4321-4326.[3]DAS A,LEWIS F,SUBBARAO K.Backstepping approach for controllingaquadrotorusinglagrange form dynamics[J].Journal of Intelligent Robotic System,2009,56(1/2):127-151.[4]赵元伟,卢京朝.四旋翼飞行器的建模及基于反步法的控制[J].科学技术与工程,2013,34:10425-10430.[5]黄兵兵,李春娟,何墉,等.基于反步法的微型四旋翼欠驱动控制[J].洛阳理工学院学报:自然科学版,2013(2):56-61.[6]黄依新.四旋翼飞行器姿态控制方法研究[D].成都:西南交通大学,2014.[7]MADANI T,BENACLEGUE A.Backstepping control with exact 2-sliding mode estimation for a quadrotor unmanned aerial vehicle[C]//Proceeding of IEEE Conference on Intelligent Robts and Systems.San Diego:IEEE,2007:141-146.[8]黄溪流.一种四旋翼无人直升机飞行控制器的设计[D].南京:南京理工大学,2010.[9]BOUABDALLAH S,SIEGWART R.Backstepping and sliding-mode techniques applied to an indoor micro quadrotor[C]// International Conference on Robotics and Automation.Barcelona:[s.n.],2005:2247-2252.[10]AL-YOUNES Younes,JARRAH M A.Attitude stabilization of qua-drotor UAV using backstepping fuzzy logic&backstepping least-mean-squarecontrollers[C]//Proceeding of the 5th International Symposium on Mechatronics and Its Applications. Amman:Inst of Elec Eng,2008:10-15.[11]刘焕晔.小型四旋翼飞行器飞行控制系统研究与设计[D].上海:上海交通大学,2009.[12]GENG Qingbo,SHUAI Huan,HU Qiong.Obstacle avoidance approaches for quadrotor UAV based on backstepping technique[C]//Proceeding of Chinese Control and Decision Conference.Guiyang:[s.n.],2013:3613-3617.[13]凌金福.四旋翼飞行器飞行控制算法的研究[D].南昌:南昌大学,2013.。
基于Backstepping的飞行控制系统设计董龙德;陈澜【摘要】现代无人机多采用多操纵面设计,这样使其性能有很大的提高,但是同时也导致了飞机控制系统设计复杂度的增加.尤其在其大迎角飞行时,是一个非线性、时变、耦合的多输入多输出( MIMO)系统,这更增加了控制系统设计的复杂度.文中针对这个问题,提出了一种基于Backstepping(回推控制)的控制律设计方法,克服了传统增益调参法需要纵横向解耦、参数切换等缺点,且具有调节时间短、超调量小、鲁棒性强和易于工程实现等优点.将无人机迎角、侧滑角和滚转角速度作为被控指标设计控制律.通过对某型无人战斗机进行飞行控制律的设计分析,得到了满意的控制效果.%Multi-control surfaces design is used in modem UAV. This improves UAV's performance a lot,but leads to increase the complexity of the aircraft control system design. Especially in the high attack angle of Qight.it is a nonlinear, time-varying,coupling and multiple-input multiple-output system. To address this issue,present a control design based od Backstepping. This method don't need decoupling on the vertical and horizontal,parameter switching and so on. And it has a short settling tune,small overshoot and strong robustness and easy engineering implementation, etc. The attack angle velocity, sideslip angle velocity and roll angular velocity of the UAV is used as control targets to design control law. By the control law design and analysis of a certain type of unmanned aircraft flight,get satisfactory control effect.【期刊名称】《计算机技术与发展》【年(卷),期】2012(022)005【总页数】4页(P188-190,194)【关键词】回推控制;大迎角机动;多操纵面;非线性控制【作者】董龙德;陈澜【作者单位】西北工业大学自动化学院,陕西西安710129;西北工业大学自动化学院,陕西西安710129【正文语种】中文【中图分类】TP390 引言现代先进飞机配置多个冗余操纵面,这有利于实现非常规飞行,提高飞行敏捷性,使飞机在机动和故障时有更多的选择,但是同时也导致了飞机控制系统设计复杂度的增加。
四旋翼自主飞行器设计报告林,张,翁(泉州师范学院物理与信息工程学院,福建泉州362000)摘要:设计四旋翼自主飞行器,使得飞行器自主的从一个指定的区域飞到另外的一个指定区域降落并停机。
四旋翼飞行器具有四个定螺距螺旋桨,可以通过协调各个旋翼的速度来控制飞行器的飞行姿态和飞行速度,而不需要繁杂的桨矩控制部件,而且也可以共享电池、控制电路板等,因此简化了结构,减轻了飞行器重量,可以减少能源消耗。
关键字:四旋翼飞行器;电机;电调一、系统方案1.1方案描述四轴飞行器是一个具有6个自由度和4个输入的欠驱动系统,具有不稳定和强耦合等特点,除了受自身机械结构和旋翼空气动力学影响外,也很容易受到外界的干扰。
无人机的姿态最终通过调节4个电机的转速进行调整,飞行控制系统通过各传感器获得无人机的姿态信息,经过一定的控制算法解算出4个电机的转速,通过I2C接口发送给电机调速器(简称电调),调整4个电机的转速,以实现对其姿态的控制。
姿态控制是整个飞行控制的基础,根据姿态控制子系统的数学模型[4],姿态控制系统需要检测的状态有:无人机在机体坐标系下3个轴向的角速度、角度和相对地面的高度。
飞控系统担负着传感器信息采集、控制算法解算及通信等各种任务,是整个无人机的核心,其主要功能有: (1)主控制器能快速获得各传感器的数据,并对数据进行处理; (2)传感器实时检测无人机的状态,包括姿态、位置、速度等信息; (3)主控制器能与PC机进行数据交换;(4)系统能进行无线数据传输。
根据四轴飞行器实际的飞行需求,飞行控制系统一般包含主控制器、各传感器模块,通信模块和电源模块等。
其中主控制器采集各传感器的信息,通过控制算法求解出4个电机的转速,通过I2C接口发送给电调;惯性测量单元检测无人机3个轴向的角速度和加速度;高度传感器检测无人机的高度;无线数传模块用于传送控制指令,也可以在调试时用于传输传感器数据;电源模块为各传感器和主控制器提供电源。