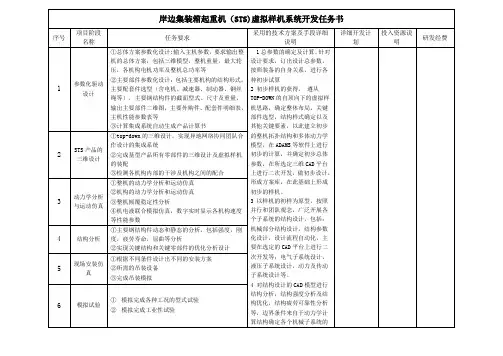
岸边集装箱起重机(STS)虚拟样机系统开发
- 格式:doc
- 大小:41.50 KB
- 文档页数:2

《岸边集装箱起重机涌浪补偿控制系统》篇一一、引言在现代化港口物流行业中,岸边集装箱起重机是关键设备之一,承担着货物装卸的重要任务。
然而,由于海洋环境的不确定性,涌浪现象时常发生,这对起重机的稳定性和作业效率提出了严峻的挑战。
为了解决这一问题,本文提出了一种涌浪补偿控制系统,旨在提高岸边集装箱起重机在涌浪环境下的作业性能和安全性。
二、系统概述岸边集装箱起重机涌浪补偿控制系统是一种集成了传感器技术、控制算法和执行机构的智能系统。
该系统通过实时监测海洋涌浪的参数,包括波高、波周期和波向等,自动调整起重机的姿态和作业参数,以实现涌浪补偿。
该系统主要由传感器模块、控制模块和执行机构模块组成。
三、系统设计1. 传感器模块:传感器模块负责实时监测海洋涌浪的参数。
该模块包括波浪高度传感器、波浪周期传感器和波浪方向传感器等。
这些传感器通过与起重机的控制系统相连,将监测到的数据实时传输给控制模块。
2. 控制模块:控制模块是涌浪补偿控制系统的核心部分。
该模块采用先进的控制算法,根据传感器模块传输的数据,实时计算起重机需要调整的姿态和作业参数。
控制模块还具有自学习和自适应功能,能够根据实际作业情况自动调整控制参数,以实现最优的涌浪补偿效果。
3. 执行机构模块:执行机构模块负责根据控制模块的指令,调整起重机的姿态和作业参数。
该模块包括液压系统、电气系统和机械结构等部分,通过协同作用,实现起重机的精确调整。
四、系统实施在实施涌浪补偿控制系统时,需要遵循以下步骤:1. 安装传感器:根据实际需求,选择合适的传感器并安装在起重机上。
传感器应具有良好的稳定性和可靠性,以确保监测数据的准确性。
2. 连接控制系统:将传感器与控制系统相连,确保数据能够实时传输。
同时,还需要对控制系统进行参数设置和调试,以适应实际作业环境。
3. 安装执行机构:根据控制系统的指令,安装相应的执行机构,包括液压系统、电气系统和机械结构等部分。
这些执行机构应具有良好的响应速度和精度,以确保起重机能够快速准确地调整姿态和作业参数。
远程自动化岸边集装箱起重机仿真培训系统研究1 引言随着船舶及港口起重机大型化的发展,传统带司机室的岸边集装箱起重机(以下简称岸桥)需要操作人员全程操作,操作人员劳动强度大,不仅限制了岸桥的作业效率,也存在司机疲劳带来的潜在安全隐患。
近年来,远程自动化岸桥应运而生,其仅需操作人员在海侧和陆侧进行最后的抓放箱流程,其余流程皆由设备自动完成。
相比传统设备,操作人员的劳动强度得到了减缓,但是由于操作人员远离设备,导致操作的沉浸感不足,远程操作人员的操作效率和可靠性分析显得尤为重要。
港口生产设备操作人员的技术熟练程度对港口生产安全、设备使用效率、使用寿命及港口经济效益起着决定性的作用[1]。
基于此,本文提出建立远程岸桥仿真培训系统,从远程岸桥的操作运行特点分析入手,总结远程岸桥仿真培训系统的功能需求,研究得出远程岸桥仿真培训系统的基本架构。
5.合同签订中存在的一些其他问题。
一是借用挂靠资质签订建筑工程合同的问题。
没有资质的企业借用或挂靠有资质的企业签订建筑工程合同,这种借用挂靠资质的合同本质上是违法的,以这种方式签订的合同属于无效合同;二是肢解项目拆分合同的问题。
为了规避招标或综合评议采取化整为零的办法,肢解项目拆分合同,一个项目拆成几份合同,增加了经营风险;三是合同名称不规范、合同分类不准确;四是基础资料管理归档混乱,日期填写错误等。
2 远程自动化岸桥操作特性洋山深水港四期远程自动化岸桥配备有CCTV系统、SPSS系统、西门子自动化系统等,操作人员通过远程操作站(ROS,Remote Operation Station),结合手柄和按钮对设备进行操作,仅需在海侧和陆侧进行最后的抓放箱流程,其余流程皆可由设备自动完成。
2.1 防摇功能下小车速度输出特性防摇技术是岸桥实现自动化装卸集装箱的重要环节,吊具自主运行可以很好地减轻司机的工作量,但若没有防摇措施的支持,其相应自动化流程将很难实现。
随着起升高度的提升,对箱难度越来越大,迅速而准确地对箱是提高装卸效率的关键。
基于Automation Studio岸边集装箱起重机仿真器郗传龙【摘要】为解决传统岸桥自动化程序开发周期长、现场测试效率低等问题,开发了岸桥虚拟仿真器.对自动化集装箱码头系统框架、岸桥结构和功能参数进行分析,并运用现代虚拟仿真技术对仿真器进行总体功能设计.以PPC2100为硬件、Automation Studio为软件平台,利用Drawbox建立模型,对仿真器进行系统开发,并通过模拟岸桥动态防撞验证仿真器的可靠性.【期刊名称】《港口装卸》【年(卷),期】2018(000)006【总页数】3页(P11-13)【关键词】岸桥虚拟仿真器;Automation Studio;动态仿真【作者】郗传龙【作者单位】上海振华智慧产业集团【正文语种】中文1 引言全球贸易已成为推动全球经济发展的重要动力。
全球贸易主要采用集装箱运输,具有高效、便捷、安全的特点。
随着港口集装箱吞吐量的增加,大型化、高速化、自动化成为港口集装箱装卸设备的主要发展趋势。
大型港口的集装箱装卸主要依靠岸边集装箱起重机(以下简称岸桥)。
岸桥的装卸效率直接影响整个码头的装卸效率。
岸桥自动化有利于提高装卸效率以及减轻司机的劳动强度。
传统的岸桥自动化开发过程主要依靠大量的真机测试和少量的仿真测试。
码头现场测试的条件有限、操作不便,使得程序的测试效率低,开发周期长。
如果程序开发前期能够依靠仿真器进行测试,验证程序功能,后期开发者就只需在现场进行少量验证性测试。
目前,仿真器已用于自动化岸桥项目开发,可缩短程序开发周期,降低成本。
2 仿真器系统需求及硬件构成2.1 仿真器功能需求分析目前,自动化码头使用的多为双小车岸桥或远程半自动单小车岸桥。
岸桥的作业流程主要包括装船、卸船。
以双小车岸桥装卸工况为例,其装船流程为:①场内运输机械将集装箱运输到门架小车下方车道;②门架小车从车道上抓取集装箱,卸载至中转平台;③主小车从中转平台抓箱,装卸至集装箱货轮上。
卸船流程与之相反。
自动化码头岸边集装箱起重机控制技术摘要:岸桥是集装箱船装卸的重要装备,其技术指标及性能指标的不断提升是集装箱船码头实现现代化、规模化的重要标志。
本文在对自动化码头岸边集装箱起重机控制层、执行层、监控层和操作层进行分析的基础上,对自动化码头岸上集装箱起重机控制技术进行了详细的论述,并将远程控制系统、半自动控制系统、故障控制系统进行了整合,最终实现了使自动化码头岸边集装箱起重机作业效率最大化的目标,从而促使自动化码头工作效率得到整体提升。
关键词:自动化码头;岸边集装箱;起重机;控制技术引言:随着船舶大型化的发展,对港口的装卸效率提出了更高的要求,与此同时,由于人力成本的不断上升,以及码头对环境保护、节能等方面的要求也在不断地提高。
基于此,自动化码头由于其安全可靠性、工作效率性、人力成本可控等明显的优点,已经成为当今建设码头的主流方向。
岸边集装箱起重机(简称岸桥)因其工作位置的特殊性,对提高港口自动化程度具有重要意义。
一.概述1.1自动化码头概念全自动化码头,通常是指自动化集装箱码头,它是将物联网、智能控制、信息管理、通信导航、大数据、云计算等技术结合起来,通过计算机系统自动生成作业指令,通过现场机器人自动完成相关作业任务,从而实现码头业务流程全自动化[1]。
1993年,世界上第一个完全自动化的 ECT码头在荷兰的鹿特丹建立起来,我国的全自动化码头建设起步时间较晚,但其发展速度较快,其中具有代表性的是青岛港、厦门港和上海洋山港。
1.2岸边集装箱起重机概念岸桥是一种用于在港口最前端进行集装箱装卸的特殊吊车,主要完成集装箱的装卸作业。
为了满足单个集装箱船上的重物装卸,部分岸边集装箱起重机配备了重物吊钩,亦也部分港口的集装箱起重机既有集装箱又有抓斗装卸。
岸桥吊车主要用于各种港口和物流中心,可以装卸不同重量的集装箱,适用于大规模转运和装卸集装箱。
同时,岸桥还可以用于制造业、厂房等需要经常搬运重物的场合[2]。
岸边集装箱起重机的虚拟样机建模白刚;林立【摘要】对岸边集装箱起重机进行虚拟样机建模,为后续的动力学仿真做建模方面的准备.首先在Solidworks中建立岸边集装箱起重机主体钢结构三维模型,然后在ANSYS中给三维模型赋予物理属性,生成有限元计算模型,并转化为模态中性文件,最后将模态中性文件导入ADAMS中去,在ADAMS中补充建立起升和小车运行机构,从而建立起岸边集装箱起重机的虚拟样机模型.【期刊名称】《中国重型装备》【年(卷),期】2009(000)004【总页数】5页(P7-10,16)【关键词】虚拟样机;板梁耦合;模态中性;轴套力;刚柔耦合【作者】白刚;林立【作者单位】上海海事大学物流工程学院,上海200135;上海海事大学物流工程学院,上海200135【正文语种】中文【中图分类】TH247岸边集装箱起重机(岸桥)是在码头前沿进行集装箱装卸作业的装卸设备。
港口的发展对港口机械的要求越来越高,因此港口装卸机械的设计计算方法需要不断地更新、充实和完善,使港口机械向更注重功能性、经济性、可靠性和安全性的方向发展[1]。
岸桥是设计成本很高的产品,一旦设计出现难以弥补的错误,会造成极大的损失。
为了减小这种风险,需要建立一个等同于真实产品的物理样机,以获得产品的机械、物理和外观性能以及可制造性、可装配性等。
但是复杂产品的物理样机通常造价昂贵,耗时长。
一旦设计方案有重大修改,就需要重新建立物理样机,导致设计成本的增加和设计周期延长。
在这种形势下,虚拟样机技术应运而生,其目的是取代物理样机,降低开发成本和周期,提高设计质量。
借助虚拟样机,设计人员可以通过建立虚拟样机模型,模拟在真实环境下产品的各种运动和动力特性,并能根据模拟结果优化产品的设计方案。
岸桥的虚拟样机模型主要包括有限元计算模型和机械动力学模型两个部分。
建立准确可靠的有限元计算模型,是构造虚拟样机的一项重要工作。
应用ANSYS软件建立有限元计算模型可分为两部分,实体模型的建立和有限元力学模型的建立。
岸边集装箱起重机的虚拟样机仿真设计平台董小虎;仲梁维;周旭东【摘要】采用Visual Studio 2005建立岸边集装箱起重机的自动化分析平台,从岸边集装箱起重机的标准Pro/E虚拟样机模型中提取主要参数并传输到由ADAMS 建立的模型中,通过模拟分析岸边集装箱起重机在各种工况条件下的运动状态,得出各重要部件的动力学数据,为岸边集装箱起重机的动态设计提供参考,并在Pro/E中自动生成施工图纸.该平台可提高岸边集装箱起重机虚拟样机的建模效率,具有一定的工程实用价值.%Visual Studio 2005 is applied to build an automatic analysis platform for quayside container crane, obtain main parameters from Pro/E virtual prototype of the quayside container crane, which will be transmitted to ADAMS model. Through the analogue simulation and analysis for the states of the quayside container crane under various working conditions, the dynamic data concerning main parts are obtained, which will provide references for the dynamic design of the quayside container crane, and create the detailed drawings automatically with Pro/E. The application of the platform may raise the modeling efficiency of virtual prototype of the quayside container crane, and play a definite role in engineering practice.【期刊名称】《港工技术》【年(卷),期】2012(049)006【总页数】3页(P15-17)【关键词】岸边集装箱起重机;仿真模拟;虚拟样机;动态设计;建模效率【作者】董小虎;仲梁维;周旭东【作者单位】上海理工大学机械工程学院,上海200093;上海理工大学机械工程学院,上海200093;上海通用广电电力元件有限公司,上海200093【正文语种】中文【中图分类】TB21;TH213.8;TP391.9岸边集装箱起重机(以下简称“岸桥”)是目前世界上用于港口、码头装卸货物的主要机械设备[1]。

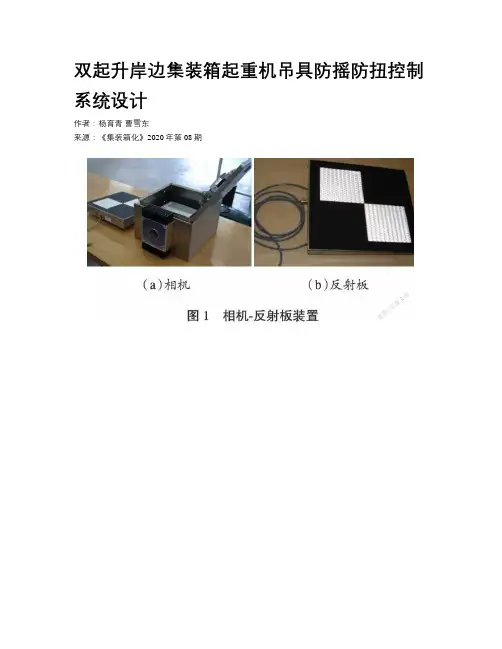
双起升岸边集装箱起重机吊具防摇防扭控制系统设计作者:杨育青曹雪东来源:《集装箱化》2020年第08期岸边集装箱起重机(以下简称“岸桥”)是集装箱码头的主要装卸设备。
在单起升单吊具岸桥作业过程中,主小车作业时间长于门架小车作业时间,导致主小车与门架小车难以协同作业,从而对岸桥作业效率提升产生不利影响。
为此,很多自动化集裝箱码头采用单起升双吊具岸桥。
单起升双吊具岸桥的优点是能够同时作业4个20英尺集装箱或2个40英尺集装箱,作业效率较高,但存在以下缺点:(1)双吊具之间连接柔软,无法应对前后或左右偏载工况;(2)单吊具作业模式与双吊具作业模式的切换时间较长;(3)在双吊具作业模式下,吊具载荷不得超过额定起升载荷(一般为65 t)。
与单起升双吊具岸桥相比,双起升岸桥采用双起升双吊具结构,不仅作业效率较高,而且不存在单起升双吊具岸桥的上述缺点,能够较好地满足自动化集装箱码头作业需求;但在应用过程中,需要确保吊具防摇防扭控制系统的可靠性和灵活性。
本文针对自动化集装箱码头双起升岸桥作业工况,设计双起升岸桥吊具防摇防扭控制系统,实现双起升岸桥吊具在双起升、海侧单起升和陆侧单起升等作业模式下的防摇防扭和半自动控制功能,从而为双起升岸桥在不同工况下的高效作业提供保障。
1 双起升岸桥吊具防摇防扭控制系统主要功能双起升岸桥吊具有双起升、海侧单起升(陆侧起升锚定)和陆侧单起升(海侧起升锚定)等作业模式。
为了满足双起升岸桥远程自动化操作要求,在上述作业模式下,双起升岸桥吊具防摇防扭控制系统应当具备以下功能。
(1)防摇功能,即吊具在1.5个摇摆周期内的摇摆幅度不超过50 mm。
防摇功能的实现原理如下:在小车架上安装电荷耦合器件相机(以下简称“相机”),并在吊具上架上安装带有红外线泛光灯的反射板(以下简称“反射板”);相机实时测定反射板的相对位置和摇摆角度,并将吊具下的集装箱状态实时反馈给吊具防摇防扭控制系统;吊具防摇防扭控制系统控制小车的运行速度和加速度,从而消除因小车加速和制动而引起的负载摆动。
前言随着经济建设高潮的到来,应该伴随出现一个文化建设的高潮。
在党的改革开放方针指导下,当今国内工业生产如火如荼,文化建设也是方兴未艾。
遗憾的是,起重机方面的文化建设却沉寂已久。
岸边集装箱起重机(简称岸桥)是集装箱码头的主力装卸设备和标志性建筑,其在我国各大港口中的地位和作用,历来为人们所重视和关注。
岸边集装箱起重机作为港口码头重要的技术物质基础,它体现了港口的生产力水平。
在岸边集装箱起重机中,结构件的费用要占整机的很大部分。
随着我国经济的高速发展,越来越多的岸边集装箱起重机投入使用,同时也面临一些问题,由于岸边集装箱起重机价格昂贵,用户总是希望尽量延长其使用寿命,制造时降低成本,提高集装箱装卸的工作效率。
岸边集装箱起重机总体设计1 集装箱吊具1.1 集装箱集装箱是一种具有足够承载强度和刚度,具有一定贮存容积,能重复使用,适用多种运输方式、便于货物装卸和整体快速换装的运输设备。
由于集装箱的规格繁多,为便于统计计算船舶的载运量、港口码头的吞吐量、库场的通过能力和机械设备的装卸效率等,国际上以20ft(6m)集装箱作为当量箱(TEU-TwentyFeetEquivalentUnit)来进行换算,将20ft(6m)集装箱称为标准箱。
这里设计是针对40ft的集装箱(40尺柜:内容积为11.8x2.13x2.18米,配货毛重一般为22吨,体积为54立方米)。
1.2 集装箱吊具的构造和特点集装箱吊具是一种起吊集装箱的专用机具,它具有与集装箱箱体相适应的结构,通过位于四角的旋锁与箱体的顶角件连接进行起吊作业。
集装箱吊具具有自动伸缩、自动开闭锁、自动对中集装箱等机构和多种连锁安全装置,作业辅助时间短,作业效率高。
集装箱吊架如图1-1所示。
图1-1集装箱吊架Fig.1-1 Container hanger集装箱吊具的额定起重量取决于相应的集装箱,其外形尺寸不应超过相应集装箱的最大外部尺寸(导向翼外)。
我国集装箱吊具型号和尺寸标准(GB 3220-82).查起重机设计手册表3-6-3,选取集装箱吊具型号JD-30 。
基于CMS系统的岸边集装箱起重机应力在线可视化仿真黄晓杰;范秀敏;程奂罛;邱世广【摘要】起重机管理系统CMS是现代化港口集装箱起重机上安装的监控系统,可对起重机的运行状态实时地监控并及时地显示出故障信息。
目前,CMS系统无法监控起重机金属结构各部分的应力变化情况,而基于有限元分析结果进行可视化的系统都是离线的,无法实现在线可视化。
针对以上不足,提出了基于现场CMS 系统信息的集装箱起重机应力在线可视化方法,给出了该方法的实现流程及若干关键技术,开发了集装箱起重机作业及应力在线可视化仿真系统(COSOVS),最后通过工程实例,验证了该系统的有效性。
%Crane Management System (CMS)is the monitoring system installed on the modern quayside container crane,applicable to monitor the running conditions and display any fault information for cranes in a real-time manner.At present,CMS is unable to monitor the stress changes of each part of crane metal structures,and the visual system based on the finite element system is off-line instead of on-line visualization.To solve these problems,the paper puts forward an on-line visual method for the stress of quayside container cranes based on the on-site CMS information,and gives the im-plementation procedure and various critical technologies for this method,with the crane operation and stress on-line visual-ization system developed.In the end,this system proves effective through engineering practice.【期刊名称】《起重运输机械》【年(卷),期】2014(000)004【总页数】6页(P1-6)【关键词】岸边集装箱起重机;有限元分析;在线;可视化;仿真【作者】黄晓杰;范秀敏;程奂罛;邱世广【作者单位】上海交通大学机械与动力工程学院上海 200240;上海交通大学机械与动力工程学院上海 200240; 上海市网络化制造与企业信息化重点实验室上海200030;上海交通大学机械与动力工程学院上海 200240; 上海市网络化制造与企业信息化重点实验室上海 200030;上海交通大学机械与动力工程学院上海200240【正文语种】中文【中图分类】U653.921;TP391.90 引言岸边集装箱起重机 (以下简称岸桥)设计中可通过建立有限元仿真模型,分析结构件的受力和应力变化,支持设计者制定合理设计方案。
岸边集装箱桥式起重机防摇控制系统作者:窦剑峰来源:《科技传播》2014年第13期摘要根据以往集装箱起重机工作过程进行观察研究,发现吊具结构部分存在严重的周期摇摆隐患,这将长期阻碍港口现场装卸控制效率。
本文具体结合模糊神经网络控制系统元素特征,实现创新形式的集装箱起重机防摇控制规模调整,利用实践控制活动和细节问题记录模式检验模糊神经网络控制装置的具体结构和应用思路,确保创新样式的防摇控制系统在硬件和软件设计上都足够优秀,带动相关产业可持续发展活力。
关键词集装箱起重机;防摇;模糊神经网络控制器;设置流程中图分类号TH2 文献标识码A 文章编号 1674-6708(2014)118-0156-01集装箱起重机在实现细致工作布置环节中,因为小车的加减速控制不当会造成吊具或者相关部件负载在平行小车桁架平面内绕小车进行周期性的弧线运动。
为了将这种不良现象克制,除了利用传统模式的机械防摇设备调整之外,可以考虑配备电子防摇系统基础,其控制机理性质基本不变,但实际应用环节中发现由于调整小车速度运行动作过于频繁,增加了员工劳动强度。
在深度结合小车控制的滞后性和非线性作用之后,联合现场干扰元素的搜集整合,有关技术人员决定使用模糊神经网络控制器的智能调试技术进行防摇控制措施的制定。
1 关于模糊神经网络控制器的研究按照应用实效内容研究,模糊形式的控制手段主要是沿着过程本身存在的不定向特征和噪声隐患进行系统内部运转动作滞后效果的鉴定,并在此基础上贯彻非线性和时变因素,烘托特定工艺技术的优越地位。
所以在对集装箱起重机进行电子防控系统的安置过程中,应该联合模糊控制神经网络进行电子防摇系统建设,其中相关管控规则内容排列顺序较为复杂,这对就现实处理环节产生严格的细致水平要求。
FNN控制器是某种存在四层神经网络的结构框架格式,在功能处理上,此类网络单层节点总是对应模糊逻辑控制的模糊特征、实施规则和反模糊化效果进行延展,所以其模糊逻辑意义相当深刻。
5 投标货物技术文件5.1 总体概述港口起重机仿真操作模拟系统是一项高技术产品,融合了起重机动力学、起重机运动学、数字图像处理、计算机图形学、传感与控制技术、信息技术、现代起重机操作技术、安全操作规范等多项学科的技术内容,代表了现代职业教育的发展方向,是一种绿色环保、无碳排放、低成本的现代化起重机操作训练及考核的先进技术。
大型港口起重机综合模拟系统能提供一个基于虚拟现实原理合成的虚拟工作环境的全三维图形显示。
在模拟系统中,起重机操作员将坐在一个由真实、互动的世界全面围绕的驾驶室内。
起重机模拟系统结合了可视化信息与声频技术,能对真实的工作环境进行了十分逼真的模拟。
港口起重机仿真操作模拟系统含岸边集装箱桥式起重机(简称岸桥,下同)、门座式起重机(简称门机,下同)两种机型,包括驾驶室系统、视景发生与投射系统、教员台系统、模拟器仿真模拟软件、教员台软件、外间教室观摩系统等。
后期可根据用户需求定制开发桥式抓斗卸船机、斗轮堆取料机、装船机、轮胎式集装箱门式起重机(简称龙门吊,下同)等多种机型。
ONEW-210起重机操作训练模拟器后台管理类系统是为整个仿真系统的控制者,各个部分的运作可由它通过发送命令数据来控制,同时它也是数据传输的中转站。
教员台系统接受来自系统网络的数据,包括来自操纵台的数据,并实时发送给视景系统以通过动力学模型来驱动视景。
同时它接受视景系统的反馈信息,并实时反馈信息和直接实时控制信号,以达到控制操作联动台的目的。
视景系统、音响系统用来产生图像和声音,座椅振动控制系统模拟实际振动。
驾驶室内有操作联动台、投影屏等用于训练操作。
控制台及监控软件系统可以实时监控查看现场人员作业情况与起重机仿真监控屏组成监控一体化系统以保证系统安全平稳运行。
港口起重机仿真操作模拟系统的主要功能包括:1、模拟器能一机多用,具有岸边集装箱桥式起重机和门座式起重机种起重机的训练功能,并可再扩展其他机型的训练功能,如桥式抓斗卸船机、斗轮堆取料机、装船机、轮胎式集装箱门式起重机等。