信号调理板接连接雷达模块示意图
- 格式:pdf
- 大小:3.30 MB
- 文档页数:2
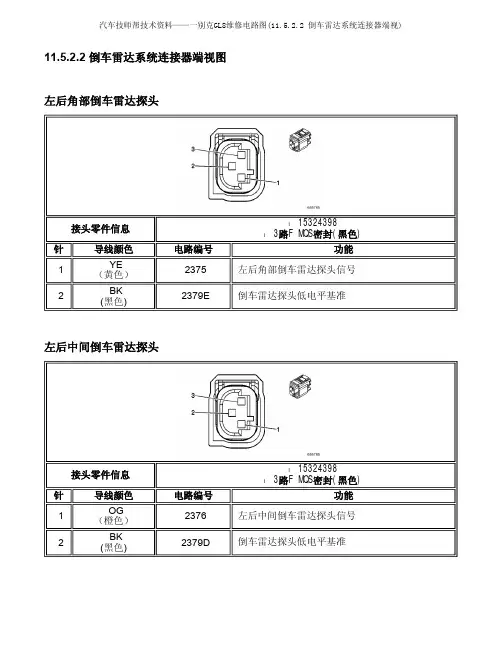
11.5.2.2 倒车雷达系统连接器端视图左后角部倒车雷达探头左后中间倒车雷达探头接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 YE (黄色) 2375 左后角部倒车雷达探头信号 2BK (黑色)2379E倒车雷达探头低电平基准接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 OG (橙色) 2376 左后中间倒车雷达探头信号 2BK (黑色)2379D倒车雷达探头低电平基准右后角部倒车雷达探头右后中间倒车雷达探头接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 PU (紫色) 2378 右后角部倒车雷达探头信号 2BK (黑色)2379B倒车雷达探头低电平基准接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 D-GN (深绿色) 2377 右后中间倒车雷达探头信号 2BK (黑色)2379C倒车雷达探头低电平基准倒车雷达探头控制模块接头零件信息l12124957l24路F 安普模块 MODULAR(黑色)针 导线颜色 电路编号 功能1 YE (黄色) 2375 左后角部倒车雷达探头信号2 OG (橙色) 2376 左后中间倒车雷达探头信号3 D-GN (深绿色) 2377 右后中间倒车雷达探头信号4 PU (紫色)2378 右后角部倒车雷达探头信号 5 - - 未用 6-7 - - 未用 8 - - 未用 9-1011 PU (紫色) 739A 点火装置1电压12 GY (灰色) 2616 后置停车辅助系统停用开关 13-14 -- 未用15 BK/WH(黑色/白色) 2379B 倒车雷达探头低电平基准 16 - - 未用 17 1819 L-BU (浅蓝色)2380 后置停车辅助系统信号输出 20 - - 未用 21 - - 未用 22OG (橙色)900灯控制23L-GN(浅绿色)24A 倒车灯供电电压24BK(黑色)350H接地。
车载防撞雷达研究与设计作者:李海涛田宇航任震赵静来源:《电子技术与软件工程》2018年第19期摘要车载防撞雷达作为汽车主动安全的核心,可有效降低事故发生概率。
本文设计并实现了一个车载防撞雷达系统,并提出一种新的目标探测算法,通过测试实验,该系统达到了预期设计指标。
【关键词】防撞雷达多目标配对 DSP LFMCW雷达车载防撞雷达是主动式安全技术的核心部件,其可以对目标实现自主检测,同时判断是否报警等功能。
本文围绕车载防撞雷达系统展开了研究,分析其基本工作原理,搭建车载防撞雷达硬件平台,研究雷达系统的目标探测算法,实现汽车防撞雷达的测速和测距功能。
1 车载防撞雷达的基本原理车载防撞雷达目的是获取目标的距离速度信息,根据策略采取有效措施并主动报警。
1.1 车载防撞雷达测距测速原理线性调频连续波(LFMCW)雷达调制方式简单,具有优良测距能力并且功率小,是车载防撞雷达最常用的一种方式,因此采用LFMCW作为本文车载防撞雷达系统的工作体制。
LFMCW体制雷达的工作原理是将信号的频率按照一定的线性斜率进行调制并发射,利用回波的时延来解算目标的信息。
当目标运动时,目标会和雷达产生相对速度(具有多普勒频移),但存在距离速度耦合,LFMCW通过采用不同斜率的调制波来去除耦合效应,从而完成对距离和速度的解算。
1.2 车载防撞雷达的总体设计要求道路环境的复杂决定了雷达系统应能够快速并且能够精准的探测本车周围目标。
根据使用要求,对车载防撞雷达系统提出以下总体指标要求:中心载频(f):24.125GHz波长(λ):12.4mm扫频带宽(B):250MHz距离分辨率(△R):<1m速度分辨率(△v):<1m/s水平波束宽度:≥15°测距范围:1m-50m最大可测速度:30m/s更新时间:≤40ms2 车载防撞雷达硬件系统的设计2.1 雷达系统的整体结构方案车载防撞雷达系统的整体结构方案见图1所示,系统以常见的LFMCW雷达系统为基础,主要是由收发天线、射频前端、中频信号调理模块、信号处理模块、调制波发生器组成。
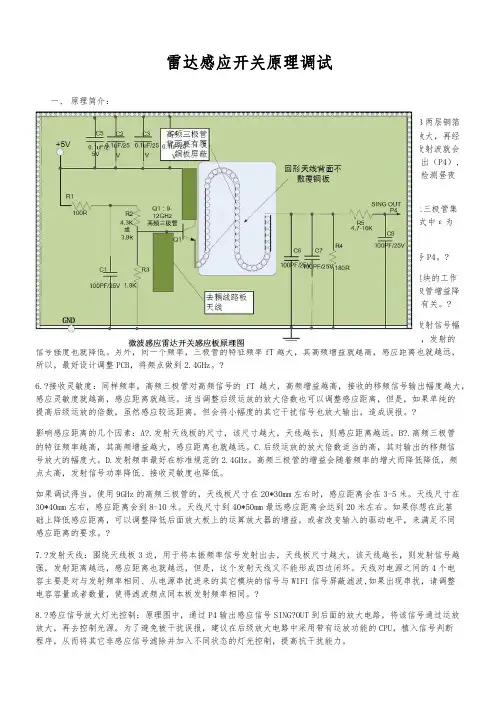
雷达感应开关原理调试一、原理简介:1.?主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由集电极外PCB两层铜箔间的电容、三极管内阻、寄生电容等构成RC震荡电路,该震荡电路震荡产生高频信号,经过三极管放大,再经过围绕PCB三边的天线发射出去。
发射的2.4-3.2GHz的微波信号如果遇到移动物体,则反射波相对发射波就会有相位变化,回型天线接收到反射信号,反射波与发射信号的相位移频就会以3-20MHz左右的低频输出(P4),该信号再由后级运放放大,驱动继电器,从而由继电器控制灯光。
另外,中间也可以加上光敏二极管检测昼夜光线,作为夜间条件下控制输出的前提条件。
?2.?发射频率:RC振荡电路的频率f=1/2πRC,公式中的R是原理图中三极管的输入阻抗,C是PCB上三极管集电极基极引线正反面铜箔之间的电容以及三极管寄生电容组成的总电容。
该电容量公式为C=εS/d,式中ε为介质(在这里就是指的PCB板材的介电常数),S为PCB极板面积,d为极板间距也就是PCB厚度。
?3.?接收:通过回型天线接收反射回来的雷达波,如果发射与接收波之间有相位移频,则输出低频信号?4.?发射避开公共频段又不能过高:因为3G和4G手机信号和WIFI信号的频率范围在1.8-2.4GHz,模块的工作频率尽可能避开这个频段,避免相互干扰。
一般的发射频率2.5GHz左右最佳,频率过高,则高频三极管增益降低,感应距离近。
发射频率同天线部分PCB线路板尺寸大小、厚度、布线、三极管输入阻抗与电容等有关。
?5.?发射频率与发射信号强度:如果有频谱仪测试发射天线端的发射信号,可以测试到发射频点及其发射信号幅度。
发射信号强度越大,感应距离越远。
但是,高频三极管来说,随着频率的增加,其增益逐渐降低,发射的信号强度也就降低。
另外,同一个频率,三极管的特征频率fT越大,其高频增益就越高,感应距离也就越远,?B?.高频三极管C.后级运放的放大倍数适当的高,其对输出的移频信2.4GHz。

2012年7月1日第35卷第13期现代电子技术Modern Electronics TechniqueJul.2012Vol.35No.13某无人机飞控系统半实物仿真平台设计薛 鹏,肖前贵,高艳辉(南京航空航天大学自动化学院,江苏南京 210016)摘 要:介绍了某型无人机飞控系统半实物仿真平台的总体功能,阐述了该平台的硬件选型原则、选型方案、基本功能及自制部件的设计过程,对各分系统仿真软件设计框架进行了描述。
最后,通过实际仿真对平台的设计功能进行了验证。
该平台也可用于对无人机飞行品质的仿真评估,以及无人机指挥操控人员的日常模拟训练。
关键词:无人机;飞行控制系统;半实物仿真;传感器仿真中图分类号:TN911.7-34;TP391.9 文献标识码:A 文章编号:1004-373X(2012)13-0111-04Design of hardware-in-the-loop simulation platform for a certain UAV flight control systemXUE Peng,XIAO Qian-gui,GAO Yan-hui(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)Abstract:The paper introduces a hardware-in-the-loop simulation platform of a certain UAV flight control system,illus-trates the selection principle,the selection scheme and functions of platform hardware and the design procedure of self-madecomponents,and describes framework of sub-system simulation software.Finally,the design functions of platform wereachieved and verified by systematic debugging and simulation.The platform can also be used to assess the UAV flight qualityand simulate the routine training for UAV operators.Keywords:UAV;flight control system;hardware-in-loop simulation;sensor simulation收稿日期:2012-02-220 引 言无人机作为模拟飞机类来袭目标,可为防空武器系统的火控雷达校飞、射击等任务提供空中靶标,是武器系统研制、鉴定过程中必不可少的装备[1]。
收稿日期:2022-04-21基金项目:国家自然科学基金(U2241277)引用格式:史磊,晏怀斌,于骏申.一种多通道数字接收机的设计与测试方法[J].测控技术,2023,42(7):80-86.SHIL,YANHB,YUJS.DesignandTestMethodofaMultichannelDigitalReceiver[J].Measurement&ControlTechnology,2023,42(7):80-86.一种多通道数字接收机的设计与测试方法史 磊,晏怀斌,于骏申(上海船舶电子设备研究所,上海 201108)摘要:设计了一种可用于测控系统的多通道数字接收机,结合性能指标测试,表明该接收机具有有效性和通用性。
重点阐述了该多通道数字接收机设计组成和下属各模块的设计原理,通过对幅度相位一致性、短路噪声、固定增益和采集预处理效果等接收机关键性能指标开展仿真测试和数据分析,给出某型测控设备中的实际测试结果,验证了设计的多通道数字接收机满足某型测控系统实际使用需求。
针对特定功能的测控系统,可通过尝试调整接收机相关模块的设计参数,为特定功能接收机设计提供参考。
关键词:多通道;数字接收机;信号调理;采集预处理中图分类号:TP29 文献标志码:A 文章编号:1000-8829(2023)07-0080-07doi:10.19708/j.ckjs.2022.10.309DesignandTestMethodofaMultichannelDigitalReceiverSHILei牞YANHuaibin牞YUJunshen牗ShanghaiMarineElectronicEquipmentResearchInstitute牞Shanghai201108牞China牘Abstract牶Amultichanneldigitalreceiverformeasurementandcontrolsystemisdesigned.Combinedwiththeperformanceindextest牞theeffectivenessanduniversalityofthereceiverareshown.Thedesigncompositionofthemultichanneldigitalreceiverandthedesignprincipleofitssubordinatemodulesareemphasized.Throughthesimulationtestanddataanalysisofthekeyperformanceindexesofthereceiver牞suchasamplitudeandphaseconsistency牞short circuitnoise牞fixedgainandacquisitionpreprocessingeffect牞theactualtestresultsinacertaintypeofmeasurementandcontrolequipmentaregiven牞whichverifiesthatthedesignedmulti channeldigitalreceivermeetstheactualuserequirementsofacertaintypeofmeasurementandcontrolsystem.Themeasurementandcontrolsystemwithotherspecificparameterscanprovidereferenceforthedesignofthere ceiverwithspecificfunctionsbytryingtoadjustthedesignparametersofreceiverrelatedmodules.Keywords牶multichannel牷digitalreceiver牷signalconditioning牷acquisitionpreprocessing 伴随着单片微波集成电路、微组装技术、A/D采样电路、大规模可编程逻辑电路、多通道数字接收技术的快速发展,数字接收机几乎已经可以完全取代模拟接收机,成为当前接收机技术发展的主要方向。
24GHz雷达传感器的运用电路图本产品可广泛应用于类似自动门控制开关、安全防范系统、ATM自动提款机的自动录像控制系统、火车自动信号机等,需要自动感应控制的场所。
这是一种标准的24GHz雷达传感器,这种探测方式与其它探测方式相比具有如下的优点:1、非接触探测;2、不受温度、湿度、噪声、气流、尘埃、光线等影响,适合恶劣环境;3、抗射频干扰能力强;4、输出功率仅有10mW,对人体构不成危害;5、远距离:探测范围超过20米。
多普勒原理简介:多普勒理论是以时间为基础的,当无线电波在行进过程中碰到物体时,该电波会被反射,反射波的频率会随碰到物体的移动状态而改变。
如果无线电波碰到的物体的位置是固定的,那么反射波的频率和发射波的频率应该相等。
如果物体朝着发射的方向移动,则反射回来的波会被压缩,就是说反射波的频率会增加;反之,当物体朝着远离发射的方向移动时,反射回来的波的频率会随之减小,这就是多普勒效应。
这种现象在日常生活中会经常遇到,比如一辆鸣笛的警车从你身边高速通过时,你听到的声音的频率是变化的:当警车高速接近你的时候,(与静止声源相比)声音传输的时间缩短,频率升高。
当警车远离你的时候,声音的传输时间拉长,频率降低。
应用实例一:自动门控制、ATM提款机自动录像控制本电路作用距离4-15米连续可调,和热释电红外探测器相比,具有抗强光干扰,探测距离远,不受温、湿度影响等优点。
电路原理简述:图中U1是微波感应探测器模块,通过K202,K203,R202,R219向模块提供2kHz 的脉动电源(能产生频率为2khz 高电平宽度为20uS的电路很多,如使用反向器CD4069、lm555 等),K201在U1起作用期间导通,把U1输出的反应物体移动的低频信号选通输出,C202为采样保持电路,保证信号的连续和完整。
由LM358组成的两极低通放大电路把U1的输出放大,在LM358的1脚输出。
可调电阻R213 用于调整一级放大器的增益,调整R213的大小可以调整探测距离。
调频连续波(FMCW)雷达信号调理电路
汪红;张杰;张大彪
【期刊名称】《仪表技术与传感器》
【年(卷),期】2012(000)001
【摘要】文中给出一种应用于调频连续波(FMCW)雷达的信号调理电路.该电路采用低噪声前置放大器、对数主中放和具有频域压缩功能的滤波器.实验表明,该电路小信号增益大于100dB,动态范围大于80dB,具有较高的信噪比和优良的滤波性能,可有效地提高FMCW雷达的抗干扰能力.
【总页数】3页(P105-107)
【作者】汪红;张杰;张大彪
【作者单位】河北化工医药职业技术学院,河北石家庄050026;解放军通信指挥学院,湖北武汉430010;河北师范大学,河北石家庄050016
【正文语种】中文
【中图分类】X701
【相关文献】
1.雷达测速标定装置信号调理电路的研究 [J], 全磊;廉飞宇;张元
2.FMCW雷达测距系统的中频信号处理电路设计 [J], 戚昊琛;张鉴;高伟清;鲍嘉明
3.调频连续波(FMCW)探测雷达数字信号处理中的快速... [J], 邴伟华
4.LFMCW雷达差频信号滤波电路设计 [J], 王斯盾;刘鹏
5.线性调频连续波(FMCW)雷达信号线性度分析和工程应用 [J], 刘杰
因版权原因,仅展示原文概要,查看原文内容请购买。