背景减除算法
- 格式:pptx
- 大小:4.56 MB
- 文档页数:49
英文回答:The traditional methodology for background subtraction and shadow detection in video surveillance is a widely employed algorithm for the detection of moving objects. This algorithm is based on the construction of a background model for a given scene, which is then utilized topare each frame of the video in order to discern foreground objects. The initial stage of this algorithm involves the formulation of a background model using statistical techniques such as mean or median pixel intensity. Subsequently, this background model is applied to categorize pixels within each frame as either background, foreground, or shadow.视瓶监控中传统的背景减法和阴影检测法是广泛使用的检测移动对象的算法。
这个算法是基于为给定场景构建一个背景模型,然后利用这个模型对视瓶的每个帧进行拓扑,以便辨别前景对象。
该算法的初始阶段涉及使用平均或中位像素强度等统计技术来制定背景模型。
随后,这个背景模型被用于将每个框架内的像素分类为背景,前景,或者阴影。
So, the first part of this algorithm is all about figuring out what's different between each frame and the background. If a pixel'svalue is a lot different from the background, it's labeled as part of the foreground. But sometimes, the background model gets outdated because of changes in lighting or camera noise, and that can cause mistakes. To fix this, the background model needs to be updated constantly to keep up with changes in the scene. And another important thing is detecting shadows, which can look like moving objects. So, wepare the color and brightness of the foreground with the background to try and spot any potential shadows.这个算法的第一部分,都是为了找出每个框架和背景的不同之处。
背景减除算法之K2017/12/16 446 Python版本:3.5.2,Opencv版本:3.2.0,网上安装教程很多,在此不再赘述MOG2算法,即高斯混合模型分离算法,是MOG的改进算法。
它基于Z.Zivkovic发布的两篇论文,即2004年发布的“Improved adaptive Gausian mixture model for background subtraction”和2006年发布的“Efficient Adaptive Density Estimation per Image Pixel for the Task of Background Subtraction”中提出。
KNN算法,即K-nearest neigbours - based Background/Foreground Segmentation Algorithm。
2006年,由Zoran Zivkovic 和Ferdinand van der Heijden在论文”Efficient adaptive density estimation per image pixel for the task of background subtraction.”中提出。
下面介绍两种算法的具体实现,实验中所用到的视频为CASIA步态数据库,用以上两种算法分别提取步态轮廓图像步态视频已上传到百度云,步态视频,提取密码:9mt0 (一)MOG2算法实现import numpy as npimport cv2cap=cv2.VideoCapture(‘D:\gait-vedio\gait.avi’)#混合高斯,对每一帧的环境进行学习,常用来对不同帧进行比较,并存储以前的帧,可按时间推移的方法提高运动分析的结果。
fgbg=cv2.createBackgroundSubtractorMOG2() while(1): #默认第一帧为背景图片ret,frame=cap.read() fgmask=fgbg.apply(frame) cv2.imshow(‘frame’,fgmask) k=cv2.waitKey(30) 0xff#按’q’键退出循环if k== ord(‘q’): breakcap.release()cv2.destroyAllWindows() 实验结果,(一)KNN算法实现采用KNN实现视频图像的背景分割算法,并且保存每一帧图像(与视频文件在相同的文件夹) import cv2#视频文件路径datapath = “D:/test1gait/”bs = cv2.createBackgroundSubtractorKNN(detectShadows = False)#背景减除器,设置阴影检测#训练帧数history=20 bs.setHistory(history)frames=0camera = cv2.VideoCapture(datapath + “gait2.avi”)count = 0#对原始帧进行膨胀去噪,#前景区域二值化,将非白色(0-244)的非前景区域(包含背景以及阴影)均设为0,前景。
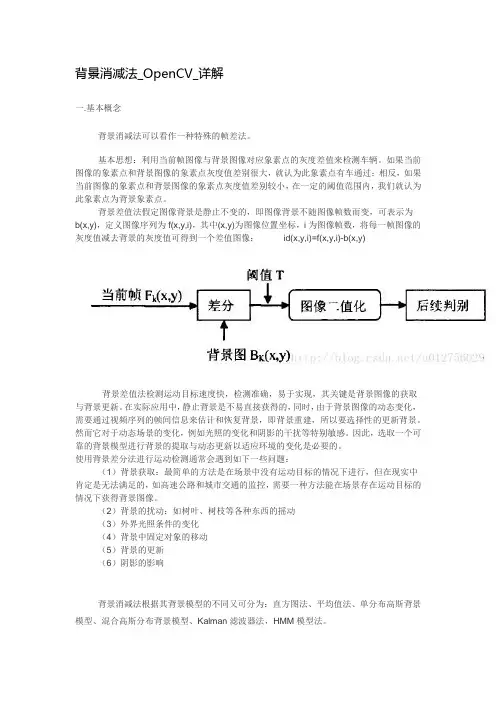
背景消减法_OpenCV_详解一.基本概念背景消减法可以看作一种特殊的帧差法。
基本思想:利用当前帧图像与背景图像对应象素点的灰度差值来检测车辆。
如果当前图像的象素点和背景图像的象素点灰度值差别很大,就认为此象素点有车通过;相反,如果当前图像的象素点和背景图像的象素点灰度值差别较小,在一定的阈值范围内,我们就认为此象素点为背景象素点。
背景差值法假定图像背景是静止不变的,即图像背景不随图像帧数而变,可表示为b(x,y),定义图像序列为f(x,y,i),其中(x,y)为图像位置坐标,i为图像帧数,将每一帧图像的灰度值减去背景的灰度值可得到一个差值图像:id(x,y,i)=f(x,y,i)-b(x,y)背景差值法检测运动目标速度快,检测准确,易于实现,其关键是背景图像的获取与背景更新。
在实际应用中,静止背景是不易直接获得的,同时,由于背景图像的动态变化,需要通过视频序列的帧间信息来估计和恢复背景,即背景重建,所以要选择性的更新背景。
然而它对于动态场景的变化,例如光照的变化和阴影的干扰等特别敏感。
因此,选取一个可靠的背景模型进行背景的提取与动态更新以适应环境的变化是必要的。
使用背景差分法进行运动检测通常会遇到如下一些问题:(1)背景获取:最简单的方法是在场景中没有运动目标的情况下进行,但在现实中肯定是无法满足的,如高速公路和城市交通的监控,需要一种方法能在场景存在运动目标的情况下获得背景图像。
(2)背景的扰动:如树叶、树枝等各种东西的摇动(3)外界光照条件的变化(4)背景中固定对象的移动(5)背景的更新(6)阴影的影响背景消减法根据其背景模型的不同又可分为:直方图法、平均值法、单分布高斯背景模型、混合高斯分布背景模型、Kalman滤波器法,HMM模型法。
二.下面分享的是两种背景实现方式:(1)背景即为第一帧图像,简单的先看看程序的基本步骤和实现方法。
这种方法适用于第一帧即为全部背景,如果存在不是背景的物体,将出现误差;同时进行了简单的背景更新;(2)背景为前50帧的平均值,对于高速的车流量较少的地段,背景提取较理想,车辆缓慢移动时会在背景上留下痕迹。
基于高斯混合模型的视频背景减除方法背景减除是计算机视觉领域一个重要的问题,它被广泛地应用在视频监控、人机交互、数字影像等领域。
比如说在监控视频中,我们想要识别在场景中出现的人或车辆,我们需要首先将背景给减去,这样才能从背景中分离出前景,并对其进行进一步的处理和分析。
常见的背景减除方法有帧差法、中值滤波法,但是这些方法存在一定的噪音和误差,提高其准确性和性能就成为了研究者们的一个很大的挑战。
高斯混合模型(GMM)是一种常见且有力的背景减除方法。
GMM 能够避免上述方法的缺点,同时比其他方法的性能更好。
GMM 是一种半监督学习方法,因为它不需要单独的先验知识或算法,而是通过观察给定样本的学习过程。
它将一个场景看作一个由许多高斯分布组合成的混合模型,每个高斯分布表示一个场景的背景。
在 GMM 中,我们考虑场景背景中所有像素点的预期颜色分布。
学习过程主要是通过EM 算法来估计高斯混合模型。
因此在视频中的每一帧图像中,我们需要通过对该场景的颜色分布进行建模,使其不会由于光照、背景变化等因素而发生变化。
如上所述, GMM 背景减除算法主要受到光照和背景变化的影响。
它使得基于样本的背景抽取建立尽量准确和可靠的灰度和颜色通道模型,然后对实时的背景剪贴板进行更新并执行前景替换。
该算法的基本流程如下:1. 将背景分为多个分量,每个分量是一个高斯分布模型。
然后不断地从场景中学习每一个高斯分布, 添加或删除高斯分布,以适应当前的场景。
2. 就算是完全背景, 在使用 GMM 算法的时候, 我们仍然可以预设一个阀值, 用来表示背景中的一个像素点变为前景所必须达到的异乎寻常值。
3. 针对每一帧中的各个像素点, 判断该像素点的颜色是否超过了预设的阀值,如果超过了则表示这个像素点属于前景, 将其标记并在图像中标出来。
4. 不断更新模型。
每一帧中的背景模型是不断变化的, 因为场景本身可能出现一些背景变化或者光照变化, 这些变化会引起背景模型发生变化。
用于视频数据压缩的背景减除技术研究随着网络的飞速发展,视频成为了人们生活中不可缺少的一部分。
视频数据的处理和传输已经成为了一大难题,其中视频数据的压缩是解决该难题的关键。
而背景减除技术是视频数据压缩中不可或缺的一个环节,在处理视频数据时,通过摄像头拍摄环境,将一些无用信息过滤掉,从而达到压缩视频数据体量的目的。
本文将探讨背景减除技术在视频数据压缩中的应用。
I. 背景减除技术的原理背景减除技术又称为运动目标检测技术,其原理是根据视频中像素的变化,将背景和目标分离开来。
背景通过相应的算法预先提取,像素变化与预先提取的背景进行比较,从而推测出像素对应的目标。
多采用的背景减除算法有快速背景统计(FBS)、自适应背景模型算法(ABM)和基于多高斯分布混合的背景减除算法(GMM)。
II. 背景减除技术在视频数据压缩中的应用背景减除技术可以达到过滤掉视频中一些无用信息,压缩视频数据体量的目的。
实际上,使用背景减除技术可以有多种应用,例如监控领域中,背景减除技术可以过滤掉监控画面中的静态背景,将需要监控的目标以动态形式呈现,可以大大提高视频传输速度、降低数据传输的成本。
另外在电影后期处理过程中,背景减除技术可以用于图像融合,将分别拍摄的多个镜头融合成一张图像,使得电影画面效果更加逼真,增强观众的沉浸感。
III. 背景减除技术存在的不足之处背景减除技术在不同领域应用的结果会有所不同,例如在复杂的背景中,背景减除技术可能会存在误判,导致目标被过滤掉,而在海上巡逻等复杂场景中,由于环境的快速变化,背景减除技术也会存在一定的局限性。
另外,在使用背景减除技术时,可能会存在一些误判,例如当一个人从摄像头后方进入画面时,可能被误判为运动目标。
IV. 背景减除技术的发展趋势随着深度学习、人工智能等技术的不断发展,基于背景减除技术的算法也在不断改进和完善。
例如深度学习技术可以通过不断的模型训练来提高判断的准确度,人工智能技术可以辅助人类进行视频对象目标的检测等。
背景去除算法随着数字图像处理技术的不断提升,图像背景去除算法也得到了不断的发展。
背景去除算法的主要目的是将图像中的目标与背景分开,以便更好地处理和分析图像。
在此,我们将介绍一些常见的背景去除算法,并讨论它们的优点和缺点。
第一种常用的背景去除算法是基于阈值的方法。
这种算法通常使用灰度值信息来识别图像中的目标和背景。
具体而言,该算法将图像的灰度值与一个固定的阈值进行比较,如果当前像素的灰度值高于阈值,则将其标记为前景,否则标记为背景。
该算法可以快速、简单地实现,但是在背景与前景之间存在复杂的互相依赖关系时,其效果不佳。
第二种常用的背景去除算法是基于深度学习的方法。
这种算法通常使用神经网络模型来训练并学习图像中的目标和背景。
该算法需要大量的标注数据和计算资源,但是它能够自动学习图像中的特征和模式,因此效果比基于阈值的方法更好,尤其是对于复杂的图像背景。
第三种常用的背景去除算法是基于差异的方法。
这种算法通过比较两幅图像之间的差异来确定目标和背景。
具体而言,该算法需要一幅没有目标的背景图像和一幅有目标的图片,通过对两幅图像进行像素级差异计算,将属于目标的像素标记为前景,类似地将属于背景的像素标记为背景。
该算法可应用于复杂背景下的目标提取,但需要事先采集不带目标的背景图片,计算量较大。
以上三种算法各有优缺点,选择何种算法应根据具体应用场景及特定需求来确定。
一般来说,对于运算速度要求较高的场合,可使用第一种算法,对于背景复杂且需要更高精度的场合,可以采用第二、三种算法。
在背景去除的应用过程中,为确保算法效果,还需要考虑预处理、后处理和优化算法等步骤。
总之,背景去除算法是数字图像处理中一个重要的基础技术,能够对图像中的目标进行准确提取和分析,为实际应用提供了重要的支持。
未来,我们相信随着科技的不断发展,背景去除算法也会得到进一步的创新和提升。
国防科学技术大学硕士学位论文背景减除的算法研究姓名:孙吉花申请学位级别:硕士专业:控制科学与工程指导教师:刘肖琳20061101国防科技大学研究生院硕士学位论文可以看出,第一类的概率最大,其平均值为176左右,取该像素的R值分量为176。
依此方法遍历所有像素的RGB值,即可以得到一幅完整的彩色背景模型图像。
数字图像处理中的灰度直方图概念与图像序列的RGB三个通道的数值单独进行统计的方法有相通之处.若把图像序列的RGB三个值分别作为灰度来看,上述的统计过程可以用三个灰度直方图分析来进行。
只是这里的灰度直方图不是单幅图像的,而是图像序列的某个对应像素位置的某个颜色单值的统计结果。
灰度直方图是灰度级的函数,描述的是图像中具有该灰度级的像素的个数。
其横坐标是灰度级,纵坐标是该灰度出现的频率汹1.对应于此处的应用,某个颜色单值的直方图是该颜色分量的函数,描述的是图像序列中某个像素位置的该分量具有此数值的个数。
例如图3~5所示;图3样本图像序列2中(100,20)像素位置的R直方图图4样本图像序列2中(100,20)像素位置的G直方图国防科技大学研究生院硕士学位论文图5样本图像序列2中(100,20)像素位置的B直方图图3~5中横坐标是该颜色分量的数值范围(图像序列中该像素的此颜色分量的最小值到最大值),纵坐标是该数值的频率(出现的次数).由图3~5可知;R通道的高频数值主要集中在两个数值,即117和118,按方柱高低的比例取其平均值作为(100,20)位置的R数值。
G通道的数值与R通道类似,高频数值集中在107和108上,按方柱高低的比例取平均值作为(100,20)位置的G数值。
B通道的情况就有些特殊,高频数值集中在107上,形成单峰,直接获取数值作为(100,20)位置的B数值。
类似的方法循环遍历所有的像素,就得到完整的一幅彩色图像,也就是我们所求的背景模型。
2.2.2静态背景减除的基本原理根据背景模型与当前视频图像的对比,找到有差异的像素归为前景目标。
背景去除算法引言背景去除算法是计算机视觉领域中重要的基础技术之一。
它的主要目标是将图像中的前景对象从背景中分离出来,以便后续的图像分析和处理。
背景去除算法在很多应用中都发挥着重要的作用,比如雄鹿球队在比赛时的投篮分析、电影特效中的绿幕抠图等等。
在本文中,我们将深入探讨背景去除算法的原理、常用方法和应用场景。
背景去除算法原理背景去除算法的核心思想是对图像进行像素级别的分析,将背景像素和前景像素分开。
根据算法的不同,背景像素和前景像素可以通过不同的特征进行区分,比如颜色、纹理、形状等。
下面我们将介绍几种常见的背景去除算法。
阈值分割算法阈值分割算法是最简单且常用的背景去除方法之一。
它基于图像的灰度值或颜色值,将像素分为两个类别:背景和前景。
阈值的选择对结果有着重要的影响,通常是通过试验和调整来确定最佳阈值。
阈值分割算法的优点是简单直观,计算速度快,但对于复杂的场景和光照变化较大的图像效果不佳。
基于统计的算法基于统计的算法利用图像的统计特性,如图像的均值、方差等,来进行背景去除。
常见的基于统计的算法有高斯混合模型(Gaussian Mixture Model, GMM)和自适应混合高斯背景建模(Adaptive Mixture of Gaussians for Background Modeling, GMM-Adaptive)。
这些算法可以适应场景的变化,并能够精确地检测出前景对象。
基于运动的算法基于运动的算法是利用前景对象和背景的运动差异进行分割的。
它基于两个假设:前景对象的运动速度快于背景,前景对象的像素强度变化大于背景。
基于运动的算法包括光流法(Optical Flow)、帧间差分法(Frame Difference)和基于块的运动检测等。
这些算法对于动态场景的背景去除具有较好的效果。
常用背景去除算法除了上述提到的阈值分割算法、基于统计的算法和基于运动的算法外,还有其他一些常用的背景去除算法,如基于纹理特征的算法、基于图像轮廓的算法等。
一种针对移动相机的实时视频背景减除算法I. 引言A. 研究背景与意义B. 国内外研究现状C. 本文研究内容与创新点II. 相关技术介绍A. 背景减除算法原理B. 移动相机视频特点分析C. 实时视频背景减除算法分类与比较III. 实时视频背景减除算法设计A. 移动相机视频预处理B. 基于深度学习的实时背景减除算法设计C. ROI区域提取和处理D. 实时运行实现IV. 实验结果与分析A. 数据集描述B. 评价方法介绍C. 实验结果展示与分析D. 算法优越性验证V. 结论与展望A. 工作总结B. 创新点归纳C. 可以改进的方向一、引言随着移动设备的普及和照相功能的逐渐强大,许多用户开始使用移动相机进行视频拍摄,例如移动端实时视频聊天、直播、拍摄等。
但是这类视频由于移动相机的自身特点,如手持、镜头晃动等问题,很难保持背景的稳定性,因此需要通过一定的算法来实现实时视频背景减除的操作,以提高视频的质量和清晰度,改善用户的观看体验。
本文的研究内容主要聚焦于一种针对移动相机的实时视频背景减除算法。
本章将从研究背景与意义、国内外研究现状和本文研究内容与创新点三个方面来介绍该算法。
A. 研究背景与意义移动相机的普及给用户带来了便利的拍摄体验,然而与专业的摄影设备相比,移动相机的成像质量和稳定性还有待提高。
特别是在实时视频聊天、直播和拍摄等应用场景中,由于移动相机自身的振动和抖动等因素,视频的背景很难保持稳定,从而影响用户的观看体验。
为此,实时视频背景减除算法应运而生,通过从相机传感器中采集到的视觉信息中分离出背景和前景的处理方式,可以在很大程度上提高实时视频质量和稳定性,使其更符合用户需求。
B. 国内外研究现状在实时视频背景减除算法的研究领域中,国内外学者在不断提出新的算法,寻求更优秀的解决方案。
目前的研究工作主要集中在两个方面:传统算法和深度学习算法。
传统算法主要包括帧差、高斯混合模型(Gaussian Mixture Model, GMM)、自适应背景模型等。
bpca 原理BPCA原理是指基于主成分分析的背景减除法(Background Pixel Counting Algorithm),它是一种常用于图像处理和计算机视觉领域的算法。
该算法的主要目的是从图像中提取出背景信息,并用于分割、识别或检测对象。
BPCA原理的基本思想是通过主成分分析将图像中的像素点分解为背景和前景两个部分。
主成分分析是一种常用的数据降维技术,它可以将高维数据转化为低维表示,并保留最重要的信息。
在BPCA 算法中,首先需要构建一个背景模型,通过对一系列背景图像的主成分分析,得到一个背景特征空间。
然后,将待处理图像中的像素点投影到该特征空间中,通过计算像素点在特征空间中的距离,判断其属于背景还是前景。
BPCA算法的具体步骤如下:1. 收集一组背景图像,这些图像应包含与待处理图像相似的背景信息。
2. 将背景图像转化为灰度图像,并将其展开为一维向量。
3. 将所有的背景图像向量组合成一个矩阵,每一列代表一个像素点的灰度值。
4. 对矩阵进行主成分分析,得到主成分向量和对应的特征值。
5. 选择保留的主成分个数,通常是根据累计特征值贡献率来确定。
6. 将待处理图像转化为灰度图像,并将其展开为一维向量。
7. 将待处理图像向量投影到背景特征空间中,得到对应的投影系数。
8. 根据投影系数,判断像素点属于背景还是前景。
BPCA算法的优点是可以准确地提取出图像中的背景信息,并且对光照、噪声等因素具有一定的鲁棒性。
它在图像分割、运动检测、目标跟踪等领域有着广泛的应用。
然而,BPCA算法也存在一些局限性,例如对于复杂背景或者前景与背景差异较小的情况,其分割效果可能不理想。
BPCA原理是一种基于主成分分析的背景减除法,通过构建背景模型和投影分析的方式,可以有效地提取图像中的背景信息。
该算法在图像处理和计算机视觉领域有着广泛的应用前景,并且具有较好的鲁棒性和准确性。
改进的Online EM背景减除算法王炜;钱徽;陈鹏;金卓军【期刊名称】《计算机工程》【年(卷),期】2011(037)004【摘要】With the challenge of extracting moving foreground objects from dynamic background, this paper introduces an improved background subtraction algorithm based on Gaussian Mixture Model(GMM) by using Dirichlet conjuagate prior and Online EM in Bayes framework, it avoids converging to a local maximum of the log-likelihood function, selects the numbers of Gaussian adaptively and outperforms thepanorama.Experimental results demonstrate that the improved algorithm can increase the detection rate for foreground effectively.%为有效提取复杂场景中的运动前景,提出基于贝叶斯理论的Dirichlet共轭先验,结合在线最大似然估计(Online EM)改进基于高斯混合模型参数的背景减除算法.改进算法避免了陷入局部最值,在线自适应地调整高斯个数,并生成运动全景图,实验结果表明,该算法能有效提高前景检测率.【总页数】2页(P201-202)【作者】王炜;钱徽;陈鹏;金卓军【作者单位】浙江大学计算机科学与技术学院,杭州,310027;浙江大学计算机科学与技术学院,杭州,310027;浙江大学计算机科学与技术学院,杭州,310027;浙江大学计算机科学与技术学院,杭州,310027【正文语种】中文【中图分类】TP391.4【相关文献】1.基于EmguCV的改进背景减除法运动目标检测方法研究 [J], 郭永锋;曹竟如;郭清宇2.基于改进的混合高斯模型背景减除算法 [J], 王占凤;郭星;徐秋月3.基于夜间环境下的改进的AMBER背景减除算法 [J], 曹峰银;王斌4.求解online packing problem的F-B绝对近似算法 [J], 黄海;李松斌5.Building Cultural and Tourism Bridge Online Visual Tour of Sichuan Series of Online Theme Promotion Activities [J],因版权原因,仅展示原文概要,查看原文内容请购买。
国防科学技术大学硕士学位论文背景减除的算法研究姓名:孙吉花申请学位级别:硕士专业:控制科学与工程指导教师:刘肖琳20061101第一章绪论1.1研究背景背景减除,即从视频系列中准确检测出运动目标而将不关心的背景完全除去,是很多计算机视觉问题中的关键技术。
视频图像中通常包含很多信息,但是人们所关心的信息往往只是其中的一小部分(比如运动的人、车辆等等).从人们是否关注的角度,可将图像信息分为前景目标和背景,若我们能把不感兴趣的复杂背景减除,就可以使后续处理过程的注意力集中到前景目标上,省去很多计算量和其它系统资源,从而大大简化视频图像理解、计算机视觉、目标监视和跟踪等问题。
如何有效的解决背景减除是一个很有研究价值的问题。
背景减除实际上是一个从摄像机拍摄的视频系列中检测出前景目标的问题。
简单地说是把前景目标理解为当前视频图像与背景模型的差异提取出来。
首先要建立视频图像序列的背景模型,然后通过图像分割方法将背景从视频图像序列中减除。
其示意图如图1所示:图I背景减除过程示意图建立背景模型是一个复杂的问题,比如光照的突变会导致原来的背景模型不再适应、摄像机抖动可能导致背景减除效果严重偏离预期目标、背景自身范围内的物体增减易位会使背景模型不再适应需要、前景目标运动过程中阴影的消除等等。
虽然背景建模问题已经有大量的研究成果,但是大多研究成果都是针对具体应用环境的,通用性仍需提高,仍有很多问题有待解决,具有很高的研究价值,也是近年来研究的热点问题。
背景减除的基本方法是根据当前图像和背景图像之间的差异是否大于一个阙值来划分前景和背景。
目前已有很多背景减除方法,一些学者采用高斯混合方法对前景和背景同时建模,或用核密度估计方法、利用平滑高斯核来提高背景模型的适应性,或用基于中值变换的估计方法利用协方差矩阵来对多模型分区的背景建模。
但是传统的高斯建模方法没有利用像素间的空间联系,只是低端二元形态学方法,需要很大的存储空间和计算量。
基于改进的混合高斯模型背景减除算法王占凤;郭星;徐秋月【摘要】背景减除法常采用混合高斯模型作为背景模型来进行目标检测,它可以自适应学习并表示分布复杂的背景.混合高斯模型在光线变化缓慢的情况下表现很好,但是在光线快速变化的情况下,由于高斯背景无快速更新机制,无法应对光线迅速变化的情况.通过对混合高斯模型进行优化,提出了一种改进的混合高斯模型检测算法,并通过实验证明了新算法明显提高了运动目标检测的准确度.【期刊名称】《河南工程学院学报(自然科学版)》【年(卷),期】2013(025)003【总页数】4页(P65-68)【关键词】混合高斯模型;背景减除法;运动目标检测【作者】王占凤;郭星;徐秋月【作者单位】巢湖学院计算机与信息工程学院,安徽巢湖238000;安徽大学计算机科学与技术学院,安徽合肥230031;巢湖学院计算机与信息工程学院,安徽巢湖238000【正文语种】中文【中图分类】TP39目前,国内外学者对图像中运动目标检测的研究很多,常用的方法有背景减除法[1]、帧间差分法[2]和光流法[3]等.前两种方法均采用当前图像与参考的差分图像进行差分运算来进行运动物体的检测,区别在于背景减除法中所采用的参考图像为视场中的背景图像,而帧间差分法所采用的参考图像通常为前几帧图像的平均值,这两种方法简单且实时性强.光流法需要进行若干次的迭代运算,所以时间复杂度比较高、耗时长.因此,人机交互这种实时性比较高的系统通常采用前两种方法.在背景较复杂的情况下,获取背景图像比较困难,在更新背景的自适应模型中Friedman与Russell[4]利用扩展的EM[5]算法,对图像中每个像素建立对应的混合高斯模型,该模型可以根据背景图像的变化自动更新,自适应地判别每个像素是背景还是前景.即使在目标运动速度比较缓慢的情况下,也能将运动目标从图像中提取出来,并且可以有效地消除阴影带来的影响.另外,Stringa[6]也提出了一种基于数学形态学的场景变化检测算法,在复杂的环境中取得了比较好的目标分割效果.1 混合高斯模型1.1 背景减除法背景减除法是物体检测中使用最为普遍的一类方法.一副图像信息可以分为前景信息和后景信息,前景信息就是需要识别检测的物体信息,这里指人体信息;背景信息就是除去前景信息后留下来的无关信息.背景减除法就是通过建立的背景模型来为每幅图像进行背景定位,然后使用差分法将前景图像从图像信息中提取出来的过程.这种方法的核心在于背景模型的选取,其速度快,能够提取较为完整的物体信息,但是对外来的噪声比较敏感[7].用背景减除法检测运动目标非常有效,基本上能够将运动目标的大小、位置和形状等信息提取出来,并且算法简单、复杂度低.但是,该方法对环境变化特别敏感,光线变化、灯照不稳定以及复杂的背景动态变化和运动目标自身由于光照产生的影子等都会造成错误背景的产生,导致检测目标不准确,所以建立有效、可靠的背景模型成为该方法的主要研究工作.1.2 高斯分布背景模型背景减除法中经常使用混合高斯模型作为背景模型进行目标检测,它可以自适应学习和表示分布复杂的背景.基于混合高斯模型的目标检测核心在于高斯模型参数的确定.(1)单高斯分布背景模型单高斯分布背景就是为背景图像中每个像素点建立一个高斯分布表示的模型η(x,μt,∑t),其中t表示时间.设像素点的当前灰度值为Xt,若η(xt,μt,∑t)≤Tp,则该点被判定为前景点,否则为背景点,这里的Tp为概率阈值.但随着时间的推移,高斯分布模型需要根据当前帧对背景进行更新.假设更新率为α,则该像素点更新可表示为μt+1=(1-α)·μt+α·Xt,(1)(2)如果更新率为1,则背景模型方法退化为帧间差分方法.(2)多高斯分布背景模型高斯模型就是以时间域为标线,对每个元素都使用k个高斯分布模型去描述它某段时间内的k个历史取值.如果k=1,那么就是单一高斯模型,而k>1就是混合高斯模型.可以这样去描述它——对于某个像素P(x0,y0),它在某时间段t内的取值集合为{X1,X2,…,Xt},从中选取k个历史值使用高斯分布模型描述并记录下来,这样就可以得到当前像素值的概率(3)其中,Wk,j表示k个历史值所占的比重,并且有权值之和表示该时刻第j个高斯模型分布的均值,而∑k,j是该高斯模型分布的协方差.这里的高斯分布模型的数量也就是k的值不是固定的,一般视情况在3~5中选取.η是高斯概率密度函数,(4)这里,n表示元素值Xt的维度数.因为对每个元素都建立了k个高斯分布模型用作背景模型,在实际使用中,会选择一些包含背景信息较多的b个高斯分布模型作为背景模型.通常将k个高斯分布模型的权值与方差的比值w/σ按照降序进行排序,选前b个分布作为背景模型,并且满足公式(5)其中,T为阈值,表示B背景模型在k个高斯分布模型中所占的比例大小.如果T 取值较大,那么背景模型个数较多,选取的背景模型则比较全面;如果T取值较小,那么背景模型个数较少,选取的背景模型则比较片面.多高斯分布背景模型的更新需要更新自身参数,还要更新各分布模型的权值.若当前没有匹配的高斯分布,则将权值最小的删除,根据当前的像素点建立一个新的高斯分布,然后将所有的高斯分布重新分配权值,归一化处理.若第m个高斯分布与Xt匹配,则对第i个高斯分布的权值更新如下:其中,β是更新率.更新完毕后,再重新将k个高斯分布进行权值计算、排序,选择b个分布作为背景模型.2 改进的混合高斯模型检测算法混合高斯模型在光线变化缓慢的情况下表现很好,但是在光线快速变化的情况下,由于高斯背景更新率较低,则没有一个快速更新机制以应对光线迅速变换的情况,故本研究设计了一个快速背景更新机制以适应光线突变的情况,具体算法如下:(1)依照传统的高斯背景为每个像素建立高斯背景模型.(2)进行前景提取,并同时统计前景像素个数Spre,计算前景像素个数占总像素个数的比例r=Spre/Sall.(3)若r大于设置的阈值,则表示光线变化很大,应及时更新背景模型并以帧间差分方法进行前景检测.与此同时,进行新的高斯背景建模,建立完毕,就以高斯背景建模的方法进行前景检测.3 实验结果与分析本实验主要验证高斯背景物体检测方法的有效性和改进的高斯背景方法对光线突变情况下的有效性以及阴影去除的结果.本实验使用的检测平台是Windows 7,其实验环境是Visual 2010,实验结果见图1、图2和图3.由图1可以看出,高斯背景的物体检测基本可以满足要求,但是人体旁边的阴影也同样被检测出来了,从原图可以看出阴影部分.图2是在门突然打开的情况下的检测结果,可以看出门的地方长期处于检测状态下,而实际上该部分并不是运动物体,从而造成误识别.图3采用改进的方法进行检测,可以看出,有效地去除了门打开后由于光线变化造成的固定背景改变而误检测出的物体,可以看出快速更新时候检测上帧与当前重合部分没有检测出来.通过实验证明,经过改进的混合高斯模型检测算法可以更加有效地进行运动物体的检测.图1 正常的高斯背景物体检测结果Fig.1 Detection result of Gaussian background object on the normal condition图2 光线突然变化情况下高斯背景检测结果Fig.2 Detection result of Gaussian background object on the condition of abrupt light change图3 光线突然变化情况下改进的算法检测结果Fig.3 Detection result of improvedalgorithmin this paper on the condition of abrupt light change 4 总结根据运动目标检测的背景减除法以及算法中的混合高斯模型,提出了基于改进的混合高斯模型检测算法,并通过实验证明了改进的算法在光线突然变化的情况下能提高对运动目标检测的准确度.【相关文献】[1] Mittal A,Paragios N.Motion-based background subtraction using adaptive kernel density estimation[C]∥Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Colorado:Springs,2004:1335-1339.[2] Foresti G.Object recognition and tracking for remote video surveillance [J].IEEE Transactions on Circuits and Systems for Video Technology,1999,9(7):1045-1062.[3] Verri A,Uras S,DeMicheli E.Motion Segmentation from optical flow [C]∥Proceedings of the 5th Alvey Vision Conference.Brighton:Brighton University Press,1989:345-359.[4] Friedman N,Russell S.Image segmentation in video sequences: a probabilistic approach[C]∥Proceedings of the Thirteenth Conference on Uncertainty in Artificial Intelligence.Providence:Brown University,1997:264-269.[5] McLachlan G,Krishnan T.The EM algorithm and extensions [M].New York:Wiley,1997.[6] Stringa E.Morphological change detection algorithms for surveillance applications[C]∥Proceedings of British Machine Vision C onference.Brighton:Brighton University Press,2000:536-552.[7] Harville M,Gordon G,Woodfill J.Foreground segmentation using adaptive mixture models in color and depth[C]∥Proceedings of IEEE EventsWorkshop.Vancouver:Janeiro,2001:436-441.。
运动目标检测之Lucas-Kanade光流算法读书笔记视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。
随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热点研究问题之一。
而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展前景。
一目标检测运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出来。
目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差分法和光流法。
1背景差分法背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。
缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检测的结果2帧间差分法帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。
当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,判断它是否大于阈值来分析视频或图像序列的运动特性,确定图像序列中有无物体运动。
图像序列逐帧的差分,相当于对图像序列进行了时域下的高通滤波。
浙江大学硕士学位论文基于历史特征模型的背景减除算法研究及实验分析姓名:***申请学位级别:硕士专业:计算机应用技术指导教师:***20070501只要我们能非常准确地,实时地获取所需要的background,我们必定能得到背景减除的优质效果(Th的设置不会成为什么问题)。
问题的难点在于background是~个实时变化的参照物,并且其变化规律呈现出多样性的特点,针对不同的实际场景,不同的运动模式,其变化规律相差很多。
因此,所有的研究本质上都是找出参照背景图像的变化规律,并相应地实时更新它。
2.1.2需要解决的问题即使是完全静止的背景场景,或者在一视频序列中完全静止的像素点,其像素点的色彩信息也不是不变的,尽管我们用肉眼无法识别。
圈2.1观察静l卜地面的某个像素点P,其坐标如图中所标记,并且没有光照影响图2.2在连续531帧视频序列豳像中,P点的灰度值的变化曲线如图2.1,我们观察基本静止(没有阴影,没有光照,没有任何运动)的P像素淅江火学硕}学位论文第二章摹于历史特征模型的背景减除算法图3.1观察自行中驶入,停车,离开这一视频序列中的同一像素点P,其像素坐标如图中所标。
选取的酗像分别是第1,84,286,1201帧图3.2图3.1中P点灰度值的变化曲线,A和C标记阶段P均为草坪,B标记阶段P为自行车图3.3幽3.1中所标记的P像素点在豳3.2中标记的A阶段以及C阶段曲线的放大浙江人学硕L-学位论文第=帚摹f历史特缸模型的背景减除算I法任意像素点在随着时|.日j的推移经历了不同的灰度值后,会实时地依掘不同的灰度值范围建立不同模型,同时将属于不同类的历史记录保存在相应的模型中,并且不断地丢弃过时的历史记录。
同样,类似于3.4章节中讲的限制模型所能保存的历史记录的最大数量,我们也必须限制任意像素点所能建立的最大模型数量。
在后面的章节中,我们会讲到模型的优先级的概念,因此,任意像素点保存的模型是按照优先级排序的,因此,当新建模型时,而模型数量超过我们限定的最大数量时,类似于历史记录的更新,我们也会删除优先级最小的那个模型。
像素、特征和语义层的视频背景减除算法研究智能视频监控是利用计算机自动对视频信号进行分析、处理和理解。
背景减除作为智能视频监控的关键技术,其检测的结果直接影响智能视频监控的效能。
论文围绕背景减除存在的背景区域动态变化会被误判为前景区域、运动目标暂时静止会误判为背景,以及逐像素分析导致算法分析时间过长的问题,从像素层、特征层、语义层上开展研究。
具体引入了像素归属预判断的模型,针对背景减除算法逐像素分析带来的误判和分析时间过长的问题,提出了运用压缩域的信息对图像像素进行快速分类,排除不可能的前景像素,提出的算法在背景减除数据库CDNET上的测试结果表明和经典的GMM算法相比,F值从0.6提高到0.75,运行时间降低了 50%。
充分利用了像素空域上相似性来简化背景减除算法分析过程。
针对背景减除算法存在逐像素判断因个别像素变化不明显导致的误判问题,提出了基于超像素分割的背景减除方法。
通过分析超像素的部分像素来判断整个超像素的类别,达到提高背景减除算法的F值目的。
CDNET2014数据库上实验表明该算法能够提高背景减除的效果。
构建了对背景变化具有鲁棒性的图像特征。
针对现有的背景减除算法难以区分背景运动和目标运动的问题,提出了利用多特征融合方法构建鲁棒的视觉区分特征,该特征可以有效区分背景区域变化和前景区域变化。
提出的算法在OTCBVS和PETS数据库上与现有的最好的针对背景突变的方法(RcurGMM)相比。
在OTCBVS上客观指标F值从0.58提高到0.69,在PETS数据库上客观指标F值从0.49提高到0.68。
提出了基于免微调的深度学习背景减除方法。
微调是现有的深度学习背景减除算法不可缺少的一步,由于学习标签难以获取,限制了深度学习在背景减除中的实际应用。
提出的方法融合了 FCN和传统背景减除算法,解决由于背景区域动态变化和运动目标暂时不动带来的误检问题。
并经CDNET数据库上的实验所示,与数据库最好的非学习的背景减除算法IUTIS-5相比,精度值从0.63提高到0.75,F值从0.71提高到0.77。