系留多旋翼无人机方案设计设计设计
- 格式:doc
- 大小:47.00 KB
- 文档页数:3
多旋翼农用植保无人机设计研究1. 引言1.1 背景介绍多旋翼农用植保无人机的设计研究是当前农业机械化发展的重要课题之一。
通过对多旋翼农用植保无人机的设计原理、主要部件设计、性能测试等方面进行深入研究,可以提高农业植保工作的效率和质量,推动农业生产方式的转变,促进农业现代化的发展。
开展多旋翼农用植保无人机设计研究具有重要的理论和实践意义。
1.2 研究目的研究目的是为了通过对多旋翼农用植保无人机设计的深入研究,探讨其在农业植保领域的应用潜力和经济效益。
具体目的包括:1. 确定多旋翼农用植保无人机设计的原理和要求,为实际应用提供指导和支持;2. 研究多旋翼农用植保无人机主要部件的设计方案,提高其稳定性和工作效率;3. 进行多旋翼农用植保无人机性能测试,评估其在实际农田作业中的表现和可靠性;4. 分析多旋翼农用植保无人机的应用案例,总结其优点和不足,为进一步改进和优化提供参考。
通过以上研究,旨在为农业植保行业提供先进的技术支持,推动无人机在农业生产中的广泛应用,提高农业生产效率和质量。
1.3 研究意义多旋翼农用植保无人机是近年来农业生产中的一项重要技术革新,其具有高效、快速、精准的特点,能够大幅提升农作物的生长质量和产量。
这种新型的农业无人机在植保作业中可以替代传统的人工喷洒,大大减少了人力成本,同时也能避免农药对人体的直接接触,对保护农民健康具有重要意义。
而随着我国农业现代化的推进,植保无人机的应用正在逐渐普及和深入发展。
对于多旋翼农用植保无人机进行设计研究,不仅可以促进农业生产的现代化进程,提高农业生产的效率和质量,还可以推动农业机械化水平的不断提升。
多旋翼农用植保无人机的设计研究还涉及到无人机技术、农业技术、机械工程等多个领域,有助于推动相关领域的技术创新和交叉融合。
多旋翼农用植保无人机的设计研究具有重要的理论和实际意义,对于推动我国农业现代化和科技创新具有积极作用。
2. 正文2.1 多旋翼农用植保无人机设计原理多旋翼农用植保无人机的设计原理是基于无人机技术和农业植保技术的结合,通过将植保喷洒设备和传感器安装在无人机上,实现对农田的精准喷洒和监测。

AXILIU-Z6/8型多旋翼系留无人机升空平台系统技术说明书编写:校对:审核:标审:会签:批准:二〇一七年七月目次4产品技术特点.............................................AXILIU-Z6/8型多旋翼系留无人机升空平台系统技术说明书1产品用途和功能1.1产品用途升空平台AXILIU-Z6/8,可实现定点长时间滞空工作,主要用于远距离通讯的-Z6/8。
1.2产品功能升空平台AXILIU-Z6/8主要的功能有:手动飞行、自动起飞、自动降落、自动返航、无线遥控、有线遥控、有线优先、RTK差分定位、卫星导航、悬停稳定、升空高度可调、失控保护功能、低电报警、低电报警电压可调、低电自动降落。
2产品性能和数据2.1产品性能a)实时向地面设备回传飞行姿态、速度、高度、经纬度等信息;b)悬停飞行功能:同时锁定高度和位置;c)具备高度锁定功能、返航点锁定功能;d)内置黑匣子;e)多种失控保护机制设计;2.2产品数据2.2.1性能指标a)飞行器重量(包含电池、桨叶、脚架):10-20kg;b)飞行器外形尺寸:8轴≤1655mm×1450mm×505mm(不含螺旋桨);6轴≤1255mm×1250mm×505mm(不含螺旋桨);c)系留迫降电池:5000-8000mAh;d)系留机载电源模块:3000-4500W;e)系留配置发电机:4000-8000W;f)导航要求: GPS、北斗双模;g)续航时间:标准电池下安全续航时间30分钟,系留模式不小于4小时。
h)最大平飞速度:20m/s;i)飞行器水平误差:≤5m;j)飞行器高度误差:≤2m;k)最大相对飞行高度:500m;l)最大海拔飞行高度:3000m;m)可靠性与维修性指标(1)飞行工作时间:≥10小时;(2)MTTR(平均修复时间):≤30min。
2.2.2环境适应性指标(1)系统工作温度:-10℃~+55℃(±2℃);(2)存储温度:-20℃~+55℃(±2℃),其中电池在常温储存;(3)湿度:(95±3)%RH;(4)抗风等级:6级;(5)防水等级:小雨(0.6~2mm/h)。
系留式多旋翼无人机飞行控制系统研究作者:来源:《无人机》2019年第01期对系留式多旋翼无人机的飞行控制系统组成原理、飞行特性、飞控算法三个方面进行了阐释和研究,考虑了系留缆作为不确定因素对于飞行控制的干扰,通过非线性鲁棒控制器引入扩张状态观测器进行抑制,从理论上进行了推导论证。
系留式多旋翼无人机凭借续航时间长、信息传输容量大、使用灵活等特点,正逐渐成为多旋翼无人机的研究使用热点,从民用到军用都得到了大力发展。
其飞行控制系统是整个无人机的控制、管理和计算中心。
由于使用场景不同及定点悬停、系留供电等特点,其控制技术与自由飞式多旋翼无人机既有相同点,也有不同点。
多旋翼无人机飞行控制系统组成及原理1.系统组成多旋翼无人机飞行控制系统主要由飞行控制计算机、导航计算机、传感器等组成。
飞行控制计算机主要完成飞行控制率解算、飞行任务管理、飞行状态监视、机载任务设备管理、机载测控单元通信等功能。
导航计算机主要用于计算飞行姿态信息、传感器信息融合、导航信息计算、航路规划和优化等任务。
传感器主要包括陀螺、加速度计、三轴磁力计、压力传感器、温度传感器、DGPS/BD接收机等,系统组成如图1所示:2.工作原理系统操作人员通过操作地面控制站软件,生成控制指令,传送给地面数传电台,经由链路传输到机载双路电台,进而送入飞行控制器当中;同时,安装在无人机特定位置的传感器组将信息分别送入飞行控制器。
飞行控制器根据这些信息进行计算,并将生成的控制信号送给无人机,从而改变无人机的姿态、速度和位置,达到控制无人机的目的。
飞行控制器将采集到的侦察图像和机体姿态、位置等传感器信息进行整理并按照系统的通信约定送给机载双路电台,经过链路送达地面控制站进行解析并实时显示。
飞行控制系统完成的主要功能是与无人机系统和测量设备一起构成姿态角和飞行高度的稳定回路。
可以按飞行控制与导航计算机给定的俯仰角和偏航角飞行,随着飞行高度和伴随飞行速度的变化自动改变飞行控制参数。

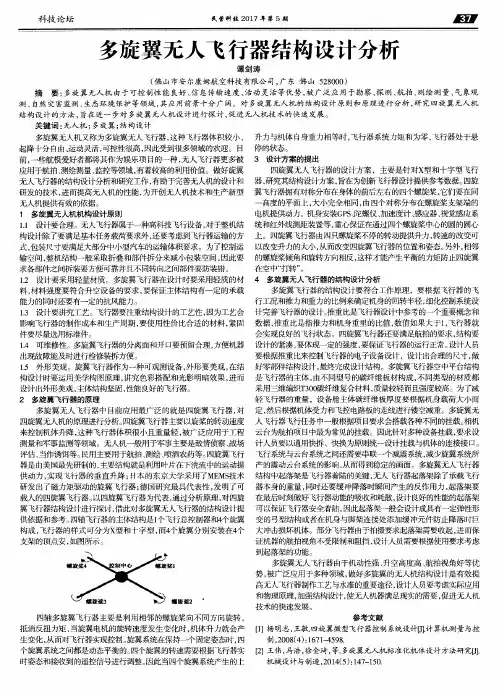
图1 系留多旋翼无人机系统组成开始广泛应用于军事领域,其军事效用也越来越广泛,成为各国军队青睐的无人机选型。
2 系留多旋翼无人机系统组成系留多旋翼无人机是通过系留综合缆绳将多旋翼无人机与地面设备组合起来的一种新型无人机系统,它采用地面电源直接供电,主要解决多旋翼无人机的持续供电问题,以使多旋翼无人机能够不受电能限制而长时间停留在空中。
系统组成主要包括三个部分:2.1空中平台空中平台部分以多旋翼飞行器机体搭载电源模块、任务载荷等组成。
飞行器机体可以根据所搭载负荷重量、体积等不同需求选择不同型号的多旋翼无人人机供电。
在使用过程中,主要由地面电源实现供电,备用电池在系留线缆供电出现故障时自动切换,从而保证无人机安全返航[4]。
任务载荷根据功能需求进行搭载,可搭载如侦察、监控、通信、测绘、环境监测等设备,既可以实现单一功能搭载,也可以多个功能复合搭载。
2.2 地面站地面站由系留收放装置、地面光电模块和操作终端组成。
系留收放装置内设置有自动控制绞盘,对比无人机升空/降落速度实现对综合缆绳的自动收放。
地面电源可以选择发电机、蓄电池组或者市电,向空中平台输送电力。
地面光电模块包括升压模块和光电图2地面固定式系留多旋翼无人机系统图3 车载移动式系留多旋翼无人机系统绍系留多旋翼无人机系统的特点。
3.1 长时留空,定点悬停普通多旋翼无人机发动机常采用电动机或燃油发动机,要依靠机载电池或者是燃油来提供动力,除了要为无人机飞行提供动力外,还需要给云台、相机等机载设备供电,这就会让普通多旋翼无人机出现续航时间短、动力不足等问题。
系留多旋翼无人机采用系留综合缆绳供电方式,不必加装重量较大的电池或者燃油发动机,既减轻了无人机自身重量,还可以利用地面电源实现不间断的持续供电,保证无人机全天24小时长时间留空。
相比固定翼无人机,系留多旋翼无人机还可通过惯性测量元件对三维角速度、三维加速度及三维速度的状态进行测量使多旋翼无人机进行稳定的悬停[5]。
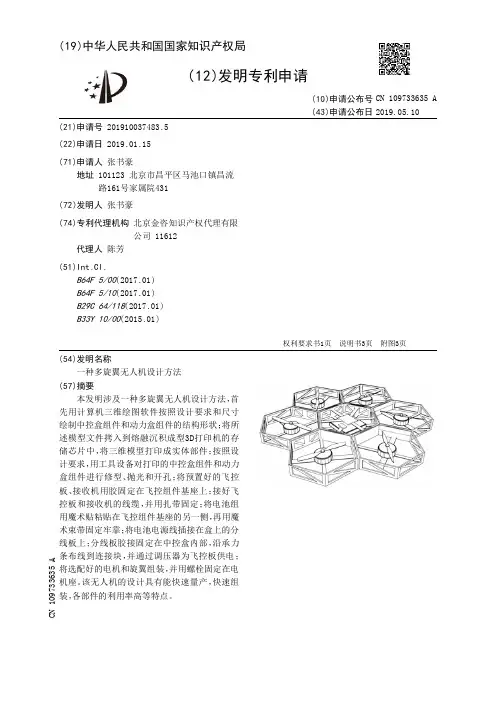
我国军用小型多旋翼无人机设计工艺我国军用小型多旋翼无人机设计工艺1. 介绍军用小型多旋翼无人机已经成为现代军事作战和侦察任务中不可或缺的一部分。
随着技术的不断进步和创新,我国在无人机设计工艺方面取得了突破性进展。
本文将深入探讨我国军用小型多旋翼无人机的设计工艺,并分享对这一领域的观点和理解。
2. 初期概念设计军用小型多旋翼无人机的设计从初期概念开始。
在这一阶段,设计师们会使用相关软件进行飞行动力学仿真和飞行性能分析,以确定无人机的结构和参数设计。
设计师要考虑的关键因素包括无人机的尺寸、负载能力、最大飞行距离和航时等。
对于军用无人机来说,设计师还需要考虑隐形性能和对环境的适应性。
3. 材料选用与结构设计军用小型多旋翼无人机的材料选用和结构设计非常重要。
轻量化材料的使用可以提高无人机的携带能力和飞行性能。
结构设计要考虑到无人机在高速飞行或恶劣环境中的稳定性和可靠性。
设计师通常会采用复合材料、碳纤维和铝合金等材料,并采用合理的结构设计来提高无人机的稳定性和载荷能力。
4. 动力系统设计军用小型多旋翼无人机的动力系统设计至关重要。
高效的动力系统可以提供足够的推力和续航能力。
在动力系统设计中,设计师们通常会选择燃气涡轮发动机、电动推进系统或混合动力系统。
还要考虑到无人机的供电方式和能源管理系统,以保证无人机在作战任务中的可持续性和可靠性。
5. 导航与控制系统设计导航与控制系统是军用小型多旋翼无人机的核心。
准确的导航和可靠的控制系统可以使无人机实现自主飞行和完成任务。
设计师需要选用先进的惯性导航系统、GPS定位系统和地面控制站等设备,以实现精确的定位和高效的通信。
设计师还需要开发适应不同作战环境的自主避障和自动驾驶功能,以提高军用无人机的战场适应性和飞行安全性。
6. 安全性与可靠性设计军用小型多旋翼无人机的安全性和可靠性设计是不可忽视的重要环节。
在设计过程中,设计师们需考虑到无人机的防故障能力和抗干扰性,以应对恶劣气候和电磁环境。
摘要多旋翼无人机已广泛应用于农业植保、电力巡检、航空摄影等行业。
然而,如何提高无人机在复杂环境下的安全稳定性始终是一个重要的课题。
本课题基于现有无人机硬件平台,以实现自主航点飞行为最终目的,研究导航算法和飞行控制算法。
主要研究内容如下:研究选择现有的四旋翼机体和STM32嵌入式硬件,为导航和飞行控制算法研究提供实验测试平台。
导航算法研究,包括航姿解算和组合导航算法。
航姿解算以陀螺仪、加速度计、磁罗盘数据为基础,采用扩展卡尔曼理论推算机体的姿态角信息。
算法选择理想的卡尔曼滤波权重并设置为定值,以减少算法运算量。
此外,采用卫星定位数据对航向角进行补偿,提高姿态角信息的准确性。
组合导航算法以卫星定位信息为基础,并结合惯性传感器数据进行数据融合,弥补卫星定位信息的不稳定和数据延时等缺陷,得到平滑、稳定的速度与位置信息。
控制系统设计,从多旋翼无人机空间六自由度运动进行分析,建立姿态、速度、高度等运动的数学模型。
利用模型辨识工具,辨识出模型的具体参数。
根据控制系统结构,自主飞行控制系统的设计分为水平横向控制、水平纵向控制、高度控制、航向控制四个独立控制回路。
考虑到模型干扰以及易受负载变化影响的特点,采用模型参考滑模控制理论,以提高控制系统的鲁棒性能。
室外实验结果表明,设计的导航系统推算的姿态角、速度、位置数据与高精度参考设备输出数据基本吻合,可为无人机提供稳定精确的导航信息。
设计的控制系统完成了实验机的自主航点飞行,并具有良好的抗干扰与鲁棒性能,验证了导航算法与控制系统设计的有效性。
关键词:多旋翼,导航系统,扩展卡尔曼,飞行控制系统,模型参考滑模控制IABSTRACTMulti-rotor UA V has been widely used in agriculture, plant protection, power inspection, aerial photography and other industries. However, how to improve the safety and stability of UA V in complex environment is still a serious problem. Based on the existing hardware platform of UA V, the navigation algorithm and flight control algorithm are studied to realize autonomous point flight in this thesis. The main research contents are as follows.The existing Quad-Rotor airframe and STM32 embedded hardware are selected to provide experimental test platform for navigation and flight control algorithm research. The research of navigation algorithm includes attitude calculation and integrated navigation. Based on gyroscope, accelerometer and magnetic compass data, the attitude information of the airframe is calculated by extended Kalman theory. The algorithm selects a stationary value as the Kalman filter weight, so that the computational complexity is reduced. In addition, the heading angle is compensated by satellite positioning data to improve the accuracy of attitude angle information. The data fusion of integrated navigation algorithm based on the satellite positioning information, combines inertial data to compensate for the instability and delay of satellite positioning information, and the smooth and stable speed and position information is obtained. To design the flight control system, the six-degree-of-freedom motion of multi-rotor UAV in space is analyzed, and the mathematical models of attitude, velocity and altitude are established. The system identification tool is used to identify the specific parameters of the model. According to the structure of the control system, the design of autonomous flight control system is divided into four independent control loops: horizontal lateral control, horizontal longitudinal control, altitude control and heading control. Considering the characteristics of model disturbance and susceptibility to load variation, the model reference sliding mode control theory is adopted to improve the robustness.The outdoor experiment results show that, the calculated attitude angle, velocity and position data of the designed navigation system coincides well with the high-precision reference equipment, and can provide stable and accurate navigation information for UAV. The designed control system has completed the autonomous waypoint flight of the experimental machine, and has good anti-interference and robust performance, which verifies the effectiveness of the navigation algorithm and control system design.Key Words:Multi-Rotor, Navigation system, Extended Kalman, Flight control system, Model reference sliding mode controlII目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1研究背景和意义 (1)1.2国内外研究现状与发展趋势 (2)1.3主要研究内容 (4)第二章实验平台与整体方案设计 (6)2.1多旋翼实验平台 (6)2.1.1四旋翼机体 (6)2.1.2嵌入式硬件平台 (7)2.2整体方案设计 (9)2.2.1导航系统方案设计 (10)2.2.2控制系统方案设计 (10)2.3本章小结 (11)第三章导航系统设计 (12)3.1 导航算法基础理论 (12)3.1.1四元数理论 (12)3.1.2卡尔曼滤波理论 (13)3.2 传感器数据处理 (13)3.2.1数据校准 (14)3.2.2数据滤波 (14)3.3 航姿参考子系统设计 (15)3.4 组合导航子系统设计 (19)3.5 本章小结 (22)第四章飞行控制系统设计 (23)4.1运动建模与模型辨识 (24)4.1.1滚转运动模型 (24)4.1.2速度运动模型 (25)4.1.3位置模型 (26)4.1.4航向运动模型 (26)4.1.5高度运动模型 (26)4.2 MRSMC控制器设计 (27)III4.2.1 参考模型设计 (28)4.2.2 滑模控制器设计 (29)4.3本章小结 (33)第五章软件系统设计 (34)5.1软件开发环境 (34)5.2 IMU模块软件设计 (35)5.3导航模块软件设计 (37)5.4飞控软件设计 (37)5.5 IAP固件升级 (40)5.6本章小结 (42)第六章实验验证与分析 (43)6.1实验环境 (43)6.1.1 MTI-G设备 (43)6.1.2 RTK(Real-Time Kinematic)设备 (44)6.1.3地面监控站 (44)6.2导航算法验证 (45)6.2.1航姿解算验证 (45)6.2.2组合导航算法验证 (46)6.3飞行控制系统验证 (47)6.3.1姿态控制 (48)6.3.2航向控制 (48)6.3.3高度控制 (49)6.3.4速度控制 (50)6.3.5航点自主飞行控制 (50)6.4本章小结 (51)第七章总结与展望 (52)7.1总结 (52)7.2展望 (52)致谢 (53)参考文献 (54)IV第一章 绪论1第一章 绪论1.1研究背景和意义无人机为一种可借助遥控器操作或嵌入式算法编程完成自主飞行的无人驾驶的空中机器人。
多旋翼无人机快速设计方法与工程应用发布时间:2023-06-02T03:47:20.943Z 来源:《科技潮》2023年8期作者:童朋毅[导读] 通过无人机动力系统选型,可形成标准化多旋翼无人机结构设计,并精确计算整机质量用于无人机飞行悬停时间计算。
西安爱生技术集团有限公司陕西西安 710065摘要:随着多旋翼无人机逐步向各行业渗透,对于多旋翼无人机不同任务进行定制化的需求逐步增加。
目前多旋翼厂家大多不具备电机、螺旋桨、动力电池等主要动力系统的自主研发能力,从正向设计多旋翼无人机系统来确保产品性能指标成为一个难题,主要是通过选择不同厂家成品动力系统进行集成设计,然后通过结构设计和性能核算进行多次迭代,进而获得一个较优的匹配结果。
关键词:多旋翼无人机;动力匹配;整机质量计算一、设计原理通过无人机动力系统选型,可形成标准化多旋翼无人机结构设计,并精确计算整机质量用于无人机飞行悬停时间计算。
如图1所示,根据最大起飞质量、飞行性能、飞行时间和特殊要求4个设计输入指标,以飞机质量设计为主线,以任务载荷和飞行时间为目标进行方案设计,通过动力选型结合结构质量快速评估,完成整机结构质量和航时的迭代,最终获得整机质量、飞行时间及质量航时关系曲线。
图1 设计原理图1.1 设计合理在设计无人飞行器的阶段时,需要考虑到两个方面,一是飞行器的整体结构需要满足飞行器的载荷要求,二是飞行器在进行运输时通常使用中小型汽车进行运输,因此它的包装尺寸必须要能够在汽车的运输体积范围内。
因此,为了缩小飞行器的运输控制空间,通常飞行器的整体结构使用部件拆分和折叠的方式,以此达到缩小包装空间的目的。
1.2 设计材质要轻量多旋翼无人飞行器的材质要达到两个要求,其一就是材料要轻质,其二就是材料要具有一定强度,能够满足升空设备的要求,并且保证它的主体机构能够具有一定的抗风能力和承载能力。
1.3设计要具有工艺性在设计飞行器的过程中,需要让结构具有工艺性,工艺性会影响整个飞行器的生产周期和制作成本。
• 166•引言:随着无人机技术的进步,系留式无人机越来越多应用在应急通信领域、灾害救援领域。
系留式无人机由于其结构上的优势比传统无人机更加适合在空中长时间停留工作,其系留线缆可以为无人机工作提供持续的电源和高速有线通信。
共轴双旋翼结构即为在旋翼无人机的一个电机臂上下安装两个桨叶。
虽然对无人机灵活性有一定影响,但是共轴双旋翼结构可以在外形尺寸不变的前提下将无人机的载重能力有近一倍的提高。
由于系留式无人机多在空中长时间停留工作状态,共轴双桨结构更加适合系留式无人机。
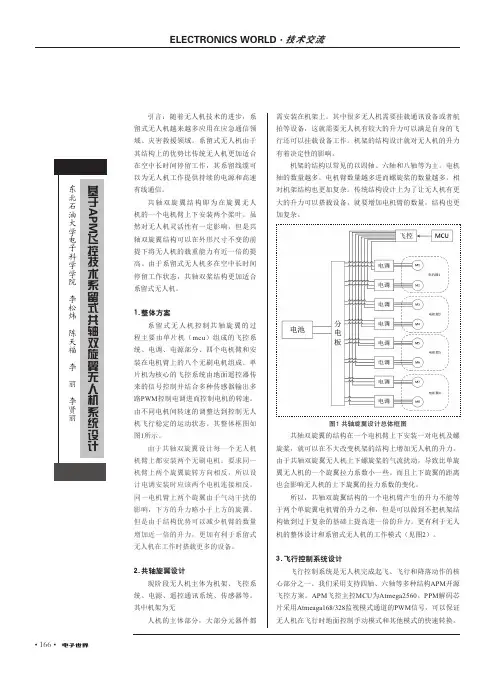
1.整体方案系留式无人机控制共轴旋翼的过程主要由单片机(mcu )组成的飞控系统、电调、电源部分、四个电机臂和安装在电机臂上的八个无刷电机组成。
单片机为核心的飞控系统由地面遥控器传来的信号控制并结合多种传感器输出多路PWM 控制电调进而控制电机的转速。
由不同电机间转速的调整达到控制无人机飞行稳定的运动状态。
其整体框图如图1所示。
由于共轴双旋翼设计每一个无人机机臂上都安装两个无刷电机。
要求同一机臂上两个旋翼旋转方向相反,所以设计电调安装时应该两个电机连接相反。
同一电机臂上两个旋翼由于气动干扰的影响,下方的升力略小于上方的旋翼。
但是由于结构优势可以减少机臂的数量增加近一倍的升力,更加有利于系留式无人机在工作时搭载更多的设备。
2.共轴旋翼设计现阶段无人机主体为机架、飞控系统、电源、遥控通讯系统、传感器等。
其中机架为无人机的主体部分,大部分元器件都需安装在机架上。
其中很多无人机需要挂载通讯设备或者航拍等设备,这就需要无人机有较大的升力可以满足自身的飞行还可以挂载设备工作。
机架的结构设计就对无人机的升力有着决定性的影响。
机架的结构以常见的以四轴、六轴和八轴等为主。
电机轴的数量越多,电机臂数量越多进而螺旋桨的数量越多,相对机架结构也更加复杂。
传统结构设计上为了让无人机有更大的升力可以搭载设备,就要增加电机臂的数量,结构也更加复杂。
图1 共轴旋翼设计总体框图共轴双旋翼的结构在一个电机臂上下安装一对电机及螺旋桨,就可以在不大改变机架的结构上增加无人机的升力。
一、小型四旋翼无人机总体架构典型的小型四旋翼无人机,一般由机械部分(机架),动力部分(包括电机、电子调速器、电调连接板、桨叶、电池),电子部分(包括飞控板、通信模块、遥控器接收机、PPM编码板)组成。
(一)机械部分机架考虑到编队飞行对实验室空间的要求,希望机架能够尽量的小。
根据与蔡国伟老师对电机与桨叶(后文提到)的搭配进行讨论后,决定将机架的大小设定为轴距255mm,边距180mm(由6寸桨的大小决定)。
1,底板 2,中间机架板 3,顶板整个机体由底板、中间机架板、顶板连接而成(通过尼龙螺柱和螺丝);底板安置电池、xbee模块、遥控器接收机、电调连接板,中间机架板安置4个电调、pixhawk飞控板,顶板用于安置定位系统标记点(同时起到保护、隐藏pixhawk 飞控板及走线的作用);为便于安装,所有开孔、镂空均根据拟选器件匹配设计;拟采用碳2mm厚3K纤维板加工。
另设计四个保护罩如下(可用于避免桨叶受损或伤人):4,保护罩(二)动力部分(1)电机一般而言,小型四旋翼无人机(轴距250mm左右)选用KV2000左右(配5-6寸桨)的电机。
经过对比讨论后,拟选用飓风D2206 KV1900无刷直流电机(配6寸桨)。
之所以选用这款电机是因为这款电机能够提供较大的拉力,同时该电机的工作电流处在一个比较小的区间,单个电机重量仅为27.5g。
飓风D2206 KV1900参数表飓风D2206 KV1900实物图(2)电子调速器电子调速器用于驱动无刷直流电机,比较重要的参数是工作电流,刷新频率,重量。
一般而言,市面上可售的大部分电子调速器的刷新频率都大于400hz,符合要求。
根据上文所选电机的工作电流,综合考虑重量要求,与蔡国伟老师沟通后,拟选用好盈XRotor-10A电子调速器。
好盈XRotor系列电子调速器参数表好盈XRotor-10A电子调速器实物图(3)电调连接板电调连接板,其本质为一块电源配电板,用于简化电池与电调、电调与飞控之间的电气连接,同时可以避免导线拆装时的反复焊接。
毕业设计(论文)题目民用四旋翼无人机飞行控制系统的设计学院名称船山学院指导教师徐祖华职称副教授班级电气工程及其自动化12级01 班学号20129450109学生姓名谭佳龙2016年5月20 日南华大学毕业设计(论文)任务书学院:船山学院题目:民用四旋翼无人机飞行控制系统的设计起止时间:2015年12月至2016年5月学生姓名:谭佳龙专业班级:电气工程及其自动化12级01 班指导老师:徐祖华教研室主任:肖金凤院长:王新林2015 年12 月20 日毕业设计(论文)文献综述题目:民用四旋翼无人机的设计学院:船山学院指导老师:徐祖华职称:副教授班级:电力01 班学号:20129450109学生姓名:谭佳龙2016年01月20日民用四旋翼无人机的设计的设计文献综述摘要:无人机航拍影像具有高清晰、大比例尺、小面积、高现势性的优点。
特别适合获取带状地区航拍影像(公路、铁路、河流、水库、海岸线等)。
且无人驾驶飞机为航拍摄影提供了操作方便,易于转场的遥感平台。
起飞降落受场地限制较小,在操场、公路或其它较开阔的地面均可起降,其稳定性、安全性好,转场等非常容易,本文详细讲述航拍无人机发展历程、现状以及未来航拍无人机的发展。
关键词:多旋翼发展历程航拍无人机前言多旋翼无人机发展历程20世纪40年代,二战中无人靶机用于训练防空炮手。
1945年,第二次世界大战之後将多於或者是退役的飞机改装成为特殊研究或者是靶机,成为近代无人机使用趋势的先河。
随著电子技术的进步,无人机在担任侦查任务的角色上开始展露他的弹性与重要性。
20世纪55年到74年的越南战争,海湾战争乃至北约空袭南斯拉夫的过程中,无人机都被频繁地用于执行军事任务。
1982年以色列航空工业公司(IAI)首创以无人机担任其他角色的军事任务。
在加利利和平行动(黎巴嫩战争)时期,侦察者无人机无人机系统曾经在以色列陆军和以色列空军的服役中担任重要战斗角色。
以色列国防军主要用无人机进行侦察兵,情报收集,跟踪和通讯。
20KG级系留多旋翼无人机
(1)性能参数
最大起飞重量:20kg
最大载重:5kg
最大跟随速度:30km/h
升限:500m(视电缆长度)
起降方式:自动/手动垂直起降
起飞准备时间:10min
系统收纳时间:10min
抗风等级:5级
续航时间:理论上无限
动力:地面电缆供电,电机
供电方式:车载发电机220V/5KW,或车载电池组192V/60AH 光纤传输能力:高清视频1920×1080@30fps
(2)飞机基本参数:
轴距:1.6m
机体高度:0.6m
长宽尺寸:2.6x2.6m
(3)机载电源参数:
工作环境:-5~40°C,湿度0-95%
散热方式:芯片智能控制风扇转速,强制散热
输入电压:DC 260 ~ 410V,标准输入DC 385V
输出电压:DC 32.5~51.25V,标准输出48 V
净重:1kg
尺寸:103(W)*40(H)*205(L)
额定输出功率:5000W
辅助输出电压:24V(供其他设备用)
辅助输出功率:300W。
20KG级系留多旋翼无人机
(1)性能参数
最大起飞重量:20kg
最大载重:5kg
最大跟随速度:30km/h
升限:500m(视电缆长度)
起降方式:自动/手动垂直起降
起飞准备时间:10min
系统收纳时间:10min
抗风等级:5级
续航时间:理论上无限
动力:地面电缆供电,电机
供电方式:车载发电机220V/5KW,或车载电池组192V/60AH 光纤传输能力:高清视频1920×1080@30fps
(2)飞机基本参数:
轴距:1.6m
机体高度:0.6m
长宽尺寸:2.6x2.6m
(3)机载电源参数:
工作环境:-5~40°C,湿度0-95%
散热方式:芯片智能控制风扇转速,强制散热
输入电压:DC 260 ~ 410V,标准输入DC 385V
输出电压:DC 32.5~51.25V,标准输出48 V
净重:1kg
尺寸:103(W)*40(H)*205(L)
额定输出功率:5000W
辅助输出电压:24V(供其他设备用)
辅助输出功率:300W。