2_DOF并联柔性结构微动平台的新构型及尺寸优化_崔玉国
- 格式:pdf
- 大小:983.49 KB
- 文档页数:8

基于柔性铰链微动平台的自抗扰控制方法
彭皓;杨志军;蔡炳彧;白有盾
【期刊名称】《机床与液压》
【年(卷),期】2024(52)8
【摘要】微动平台一般以柔性铰链为导向机构,由于系统固有频率低,会严重限制传统PID算法的控制带宽,影响定位精度。
因此,设计自抗扰控制算法(ADRC)将系统未建模动态与外部未知扰动共同视作“总扰动”,通过扩张状态观测器(ESO)进行估计和补偿,提高系统的控制带宽。
为了充分利用已知的模型信息,设计基于模型的ADRC算法,将柔性铰链标称模型输入到ESO中,进一步提升系统的控制性能。
最后,通过10μm行程的点位运动实验进行验证。
结果表明:因为控制带宽无法过大而导致PID难以响应,ADRC提高了控制系统带宽,实现了精密定位;模型ADRC进一步提升了响应速度与定位精度。
相比ADRC,模型ADRC整定时间缩短了68.1%,最大跟踪误差降低了53.8%,定位精度提升了60.7%。
【总页数】5页(P24-28)
【作者】彭皓;杨志军;蔡炳彧;白有盾
【作者单位】广东工业大学;佛山市华道超精科技有限公司;汕头职业技术学院机电工程系
【正文语种】中文
【中图分类】TP273
【相关文献】
1.空间微动平台的柔性铰链参数优化设计
2.柔性铰链的微动平台设计
3.新型并联柔性铰链微动精密平台的研究
4.基于柔性铰链的二维微动平台特性研究
5.基于最小二乘法优化的柔性机械臂自抗扰控制方法
因版权原因,仅展示原文概要,查看原文内容请购买。

柔性铰链的微动平台设计
何伟宏;高健
【期刊名称】《机械设计与制造》
【年(卷),期】2014(000)001
【摘要】根据高性能直线电机直接驱动宏动平台和宏/微双重驱动精密定位机构的要求,基于柔性铰链设计微动平台,实现大行程纳米级别的分辨率和定位精度;微动平台采用压电陶瓷驱动,安装于宏动平台上;整个宏/微系统采用精密绝对光栅和精密增量光栅二级位置检测以解决大行程和高分辨在检测上的矛盾问题,以此为位置反馈实现闭环控制.在平台结构设计的基础上建立系统质量刚度动力学模型,分析平台在阻尼垫块不同的情况的稳定性能.
【总页数】3页(P56-58)
【作者】何伟宏;高健
【作者单位】广东工业大学机械装备制造与控制技术教育部重点实验室,广东广州510640;广东工业大学机械装备制造与控制技术教育部重点实验室,广东广州510640
【正文语种】中文
【中图分类】TH16
【相关文献】
1.空间微动平台的柔性铰链参数优化设计 [J], 黄金永;魏燕定;张炜
2.六自由度微动工作台柔性铰链设计 [J], 魏玉凤;余晓芬
3.新型并联柔性铰链微动精密平台的研究 [J], 李仕华;韩雪艳;马琦翔;李富娟
4.基于柔性铰链的二维微动平台特性研究 [J], 黄金永;娄岳海;魏燕定
5.基于柔性铰链结构的二维微动工作台的设计分析 [J], 张建雄;孙宝元
因版权原因,仅展示原文概要,查看原文内容请购买。
新型并联柔性铰链微动精密平台的研究李仕华;韩雪艳;马琦翔;李富娟【摘要】基于3-PRC并联机构提出一种由压电陶瓷驱动的新型3-PRC并联微动平台,并进行了构型优化设计;采用矢量法对该平台的位置进行分析,并给出了该平台的理论耦合性误差;采用有限元对其运动解耦性进行了研究.最后制作了实验样机,并进行了实验测试.研究结果表明,该并联微动平台可以实现微米级三维移动,具有较高的精度和良好的运动解耦特性.【期刊名称】《中国机械工程》【年(卷),期】2016(027)007【总页数】6页(P888-893)【关键词】3-PRC;并联微动平台;解耦;三维移动【作者】李仕华;韩雪艳;马琦翔;李富娟【作者单位】燕山大学河北省并联机器人与机电系统实验室,秦皇岛,066004;燕山大学河北省并联机器人与机电系统实验室,秦皇岛,066004;燕山大学河北省并联机器人与机电系统实验室,秦皇岛,066004;燕山大学河北省并联机器人与机电系统实验室,秦皇岛,066004【正文语种】中文【中图分类】TP24随着计算机科技的迅速发展,设备微型化、微芯片高度集成化、操作精密微小化,使得微纳米技术成为国内外重点研究的方向,这就对高精度微操作系统提出了迫切的要求。
而由微定位技术与并联机器人技术结合而产生的微动并联机器人技术成为新的发展方向[1]。
近年来,许多并联结构的微动机器人样机相继诞生。
张旭辉[2]提出一种新型2-2-2正交6-RSS微动机器人模型;杨启志等[3]设计了一种非对称全柔性3-RRRP微动并联激振台机构;贾晓辉等[4]基于Delta机构设计并制造出了可以实现三维移动的3-RRPR精密定位平台,利用矢量闭环法建立了其速度、加速度方程,并采用虚功原理进行了动力学分析;李仕华等[5]提出了一种新型3-RRRRR并联微动机构,能够实现三维解耦纳米级的移动。
新加坡南洋理工大学的Vahid等[6]研制出一种由压电陶瓷驱动的三自由度锥形并联微动机构,三个压电陶瓷分别装在空间对称分布呈120°角度的分支连杆上,可以实现空间三维移动。
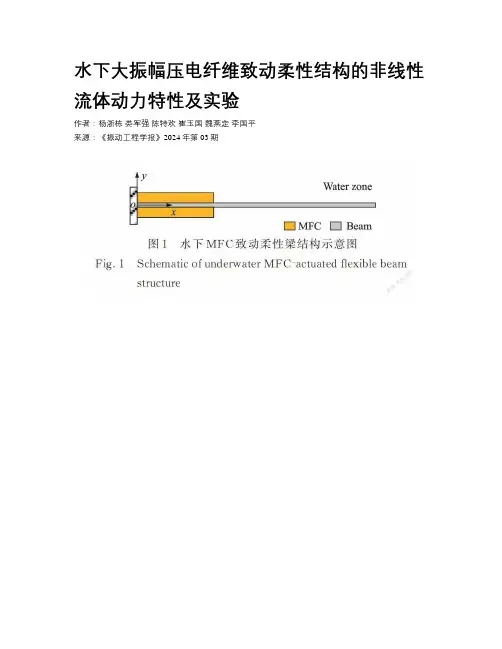
水下大振幅压电纤维致动柔性结构的非线性流体动力特性及实验作者:杨浙栋娄军强陈特欢崔玉国魏燕定李国平来源:《振动工程学报》2024年第03期摘要水下智能材料驱动柔性结构在机器鱼、水下航行器及精密医疗等领域具有广阔应用前景。
本文研究了水下大振幅压电纤维(Macro Fiber Composite, MFC)致动柔性结构的非线性流体动力特性,建立了流固耦合振动模型,并进行了实验验证。
通过参数化的二维CFD分析了不同特征振动频率及振幅下柔性结构周围流场的分布演化规律,发现随着柔性结构特征振幅增大,其周围流场逐渐出现了涡旋脱落及对流现象,且流体阻尼效应的非线性随之增强。
提出了由特征振动频率和振幅共同确定的非线性修正流体动力函数解析表达式,分析结果表明:在小振幅情况下,修正流体动力函数虚部也就是流体阻尼效应随着特征振动频率的增大而减小;而当特征振幅增大到一定值后,流体阻尼效应随着特征振动频率的增大却呈现出先减小后增大的变化规律,具有强烈的非线性特性。
开展了水下MFC致动柔性结构振动特性验证实验,证实柔性结构在MFC主动激励下的实测幅频、相频特性与理论预测结果基本一致,验证了所提修正流体动力函数表达式及流固耦合振动模型的有效性。
关键词非线性流体动力学; 流体动力函数; 流固耦合振动; 水下柔性结构; 压电纤维引言鉴于柔性结构具有质量轻、柔性好且载荷自重比高等优点,柔性结构与周围流体的耦合作用机制被研究者引入到工程领域中,在微纳机械传感/致动器件、柔性流体能量俘获装置、仿扑翼微飞行器以及水下仿生推进装备等领域得到广泛应用[1‑2]。
但是柔性结构特性导致其在流场运动中易产生弹性振动,使整个结构的动力学特性更加复杂,并降低了系统性能。
因此黏性流体环境中柔性结构的流固耦合振动问题引起了国内外学者的广泛关注,并成为了研究热点[3]。
压电陶瓷、形状记忆合金、离子基聚合物以及介电弹性体等智能材料为流体环境中柔性结构的驱动和主动控制提供了全新方式[4]。
3-RPS柔顺并联机构的构型设计及仿真李培;周道鸿【摘要】首先根据3-RPS并联机构的结构特点设计3-RPS型柔顺并联机构;其次运用RecurDyn软件仿真出动平台及三条支链的运动形态,并绘制出支链上各个铰链的速度-时间、位移-时间曲线;最后得出结论:每个铰链的速度和位移均随时间变化,并且变化范围均很小,最后趋于稳定,为柔顺并联机构的运动学研究提供帮助.【期刊名称】《滁州学院学报》【年(卷),期】2016(018)002【总页数】4页(P40-43)【关键词】并联机构;柔顺并联机构;RecurDyn【作者】李培;周道鸿【作者单位】蚌埠学院机械与车辆工程系安徽蚌埠233000;蚌埠学院机械与车辆工程系安徽蚌埠233000【正文语种】中文【中图分类】TH12与并联机构相比,柔顺并联机构[1]作为利用自身柔性连接杆件以及各铰链的弹性变形将力、运动或能量进行转换的一种新型免装配机构,其避免了各运动副之间的装配误差及间隙对末端平台运动特性所造成的影响;在空间内具有多自由度的运动特性。
国内外的许多学者将柔性机构相关理论与并联机构理论相结合,对空间柔顺并联机构进行了深入的研究。
1983年Hunt提出3-RPS型并联机构的构型和相关理论,并得出该机构实现2R1T的运动,并在工业中得到广泛应用;Lee将该机构应用于微动机器人;黄真等[2]于1996年根据螺旋理论探究了该机构的运动学特征,建立了运动学及动力学模型,之后设计出多种3自由度的立方角平台机构,如3-CS机构,3-PRS机构,3-RRS机构,3-TPT机构,3-PSP机构,3-RRRH机构,3-RRRP机构及3-RRC机构等。
之后,黄真等人首次研制了一种以柔性铰链代替常规铰链的六自由度柔性并联机构。
清华大学的吴鹰飞利用蠕动的运动原理设计了具有三自由度运动的微动平台。
江西理工大学的江涛和朱大昌[3]分析了一种三平移柔性并联微动精密定位平台。
目前,柔顺并联机构的研究大致分为以下三个方面:(1)在并联机构的基础上建立柔顺并联机构[4],但刚性体和柔性体之间存在差异。
![圆弧形柔性铰链式二维并联压电微动平台的设计[设计+开题+综述]](https://uimg.taocdn.com/6bb05ee5b9d528ea80c77958.webp)
开题报告机械设计制造及其自动化圆弧形柔性铰链式二维并联压电微动平台的设计一、选题的背景与意义随着科技的发展, 各类精密、超精密仪器仪表, 如图形发生器、分步重复照相机、光刻机、电子束和X射线及其检测设备等被广泛地应用于科学研究和现实生活中。
与此同时, 相配套的各类精密、超精密微动平台也应运而生。
在电子、光学、机械等精密产品制造业中, 经常需要精度高、配置灵活、维护方便的定位平台。
现代社会对机械产品的精度和表面质量的要求不断提高,而高精度微位移装置是超精密机床的关键装置, 如要实现微量进给、超薄切削、加工误差的在线补偿, 以及加工非轴对称特殊型面等功能, 都离不开微位移技术。
随着科学技术的不断发展, 在宇航和航空领域也采用微位移工作台实现高精度等要求。
二、研究的基本内容与拟解决的主要问题2.1 研究的基本内容1.基于微动平台应同时具有良好的位移输出特性和刚度特性的要求,并考虑材料的加工工艺性,确定微动平台的材料;2.基于圆弧形柔性铰链结构,确定二维串联微动平台的结构形式;3.确定圆弧形柔性铰链与微动平台的几何尺寸;4.基于所确定的圆弧形柔性铰链与微动平台的几何尺寸以及所给定的微动平台的位移行程,计算圆弧形柔性铰链的最大应力,校核微动平台的强度;计算微动平台的弹性恢复力、刚度;5.基于所给定的微动平台的位移行程以及由计算所得的微动平台的弹性恢复力与刚度,确定压电陶瓷执行器的参数:最大输出位移、最大驱动力、刚度;6.分别基于Pro/E、AutoCAD绘制微动平台的三维造型图、装配图与零件图;2.2拟解决的主要问题对圆弧形柔性铰链式二维并联压电微动平台进行结构设计,并确定其材料、几何尺寸,校核和确定各种参数。
三、研究的方法与技术路线采用经验公式来计算平台的弹性恢复力、刚度和柔性铰链的形式和结构尺寸第1~4周:查阅文献,了解微动平台的原理及其应用;第5~6周:确定压电微动平台的材料、结构形式以及几何尺寸;第7~11周:基于圆弧形柔性铰链结构,对微动平台进行设计计算,即对其进行 强度校核,计算其弹性恢复力与刚度,确定压电陶瓷执行器参数;第12周:绘制微动平台的三维造型图、装配图与零件图;第13周:撰写毕业论文参考文献[1] 陈时锦, 杨元华, 孙西芝, 程凯. 基于柔性铰链的微位移工作台性能分析与优化设计[J]. 机械设计, 2004, 21(7): 46-49[2] 关耀奇, 陈蓉玲. 柔性铰链在精密和超精密加工中的应用与研究[J]. 机械设计, 2003,20(3): 46-47[3] 黄金永, 魏燕定, 张炜. 空间微动平台的柔性铰链参数优化设计[J]. 机电工程, 2006,23(1): 55-57[4] 纪海慧, 钱进. 基于柔性铰链的精密定位平台的设计[J]. 机床与液压, 2007, 35(11):62-64[5]张建雄, 孙宝元. 基于柔性铰链结构的二维微动工作台的设计分析[J]. 压电与声光,2006, 28(5): 624-626[6]田延岭, 张大卫, 闫兵. 二自由度微定位平台的研制[J]. 光学精密工程, 2006,14(1): 94-99[7]刘品宽, 孙立宁, 曲东升, 荣伟彬. 新型二维纳米级微动工作台的动力学分析[J].光学精密工程, 2002, 10(2): 143-147[8]高鹏, 袁哲俊, 姚英学. 基于柔性铰链结构的新型双向微动工作台的研究[J]. 仪器仪表学报, 1998, 19(2): 192-193[9]Kee-Bong Choi, Jae Jong Lee, Seiichi Hata. A piezo-driven compliant stage with double mechanical amplificationmechanisms arranged in parallel[J]. Physical, 2010, 161(2):173-183[10]Chi-Ying Lin, Po-Ying Chen. Precision tracking control of a biaxial piezo stage using repetitive control anddouble-feedforward compensation[J]. Mechatronics, 2010, 59(5):24-32[11]Hua Wang, Xianmin Zhang. Input coupling analysis and optimal design of a 3-DOF compliantmicro-positioning stage[J]. Mechanism and Machine Theory, 2008, 97(9):400-410[12]S.B. Choi, S.S. Han, Y.M. Han, B.S. Thompson. A magnification device for precision mechanisms featuringpiezoactuators and flexure hinges: Design and experimental validation[J], Mechanism and Machine Theory, 2007 59(11):1184-1198毕业论文文献综述机械设计制造及其自动化圆弧形柔性铰链式二维并联压电微动平台的设计1、前言以柔性铰链为导向机构的超高精度微动工作台已被广泛用于能束加工、超精密检测、微操作系统等要求具有纳米级定位分辨率的技术领域中。

冗余驱动并联摇摆台的动平台刚度分析孙巧如;韩先国【摘要】针对并联摇摆台的支撑特点,采用节点载荷分配系数的方法将动平台的交叉梁系拆分为简支梁,根据同一节点处变形量相等的条件,建立关于各节点载荷分配系数的方程,进而计算出交叉梁系的最大变形量.分别计算交叉梁系在非冗余和冗余驱动时的最大变形量,并采用有限元的方法对其进行验证,表明节点载荷分配系数法计算交叉梁系的变形量是合理的.当机构存在驱动误差时,动平台可以通过自身刚度的变化减小由于误差而产生的系统内力.【期刊名称】《机电产品开发与创新》【年(卷),期】2015(028)004【总页数】4页(P1-3,58)【关键词】交叉梁系;载荷分配系数;冗余驱动;刚度【作者】孙巧如;韩先国【作者单位】北京航空航天大学机械工程及自动化学院,北京100191;北京航空航天大学机械工程及自动化学院,北京100191【正文语种】中文【中图分类】TP319并联机构具有刚度质量比大、承载能力强、累积误差小等优点[1],将其作为运动模拟器模拟船舶在海浪中的运动具有重要的意义。
其动平台具有尺寸大、承载能力要求高、刚度要求高等特点,因此采用冗余驱动提高系统刚度[2]。
国内外学者在并联机构的刚度方面进行了一定的研究。
梁辉等[3]通过建立3RPS/UPS冗余并联机床的刚度模型对并联机床的支链进行刚度分析,Goldsmith[4]应用刚度矩阵分析法建立3-UPU并联机构的刚度解析模型,宋轶民等[5]采用螺旋理论建立了一种三自由度冗余驱动并联机构的刚度解析模型,并预估其全域刚度分布规律。
现有文献对并联机构的刚度进行了一定的研究,但是多数将并联机构的动平台视为理想刚体,并未对其刚度进行分析。
针对本文所设计的并联摇摆台,由于其动平台的尺寸大、刚度要求高,因此需要对其刚度进行一定的研究。
利用有限元分析机构的刚度方法简单,精度较高,但是耗时多,工作量大,为便于并联机构参数的多变量优化设计,仍需要建立机构的静刚度解析模型。

空间3-DOF全柔性微动平台的设计与分析徐洪业;李杨民;李祥春【摘要】本文设计了一种空间3-DOF全柔性微动平台并对其进行了有限元仿真分析.基于Kutzbach-Gr bler公式对机构的自由度进行了计算;采用桥式位移放大机构作为微位移的放大机构,使微动平台的运动空间进一步扩大,并对桥式微位移放大机构的放大比进行了理论计算与ANSYS有限元仿真分析,理论计算与仿真结果的误差为;对微动平台利用ANSYS workbench进行仿真分析,其误差为;研究结果为以后柔性微动平台的设计与制造起到了积极的指导作用.%In this paper,a spatial 3-DOF flexible micro-motion platform is designed and analyzed by finite element method.Based on the Kutzbach-Grubler formula,the degree of freedom of the mechanism is ing the bridge-type displacement amplifier as the micro-displacement amplifying mechanism,the motionalworkspace of the micro-platform is further expanded,and theerrorofmagnification ratio of the bridge-type micro-displacement amplifier between theoretical calculation and ANSYS finite element analysis calculation is 2.72%.The error is 18.7% for simulation using ANSYS workbench.The design and analysis of flexible micro-motion platform has played a positive role in guidance for future research works.【期刊名称】《天津理工大学学报》【年(卷),期】2018(034)001【总页数】6页(P31-36)【关键词】全柔性;自由度;桥式微位移放大机构;放大比;有限元仿真【作者】徐洪业;李杨民;李祥春【作者单位】天津理工大学机械工程学院天津市先进机电系统与智能控制重点实验室,天津300384;天津理工大学机械工程学院天津市先进机电系统与智能控制重点实验室,天津300384;香港理工大学工程学院工业及系统工程学系,香港999077;天津理工大学机械工程学院天津市先进机电系统与智能控制重点实验室,天津300384【正文语种】中文【中图分类】TP242.620世纪80年代中后期,柔性机构被Purdue大学提出并开始系统的研究[1].随着科技的飞速发展设备微型化、微片高度集成化、操作精密化等使微/纳米技术成为国内外重点研究的核心方向[2].人们越来越迫切的需要具有微纳米级运动精度、多自由度、高度灵活的超精密定位系统用于实现高精度的操作和实验研究.由于传统机械机构存在摩擦,所以一定会存在定位误差,使得定位精度降低.因此,必须寻求一种新的驱动和传动机构的定位平台并具有更高的定位精度.柔性并联机构的出现为实现更高精度的微纳米级定位机构的设计提供了新的、更好的方法[3].柔性并联机构是一种具有复杂构件的柔性机构,它不像传统刚性机构那样靠运动副来实现全部运动和功能而主要靠机构中的柔性构件或机构本身的柔性来实现机构的主要运动和功能,以实现运动、力、能量和位移的传递和转换[4].一般柔性机构通过利用柔性铰链来代替对应的相关传统铰链,利用柔性铰链受力时的弹性变形传递力和运动,达到整个柔性运动链的输出运动.柔性机构与传统机构相比具有以下优点:无间隙和摩擦;免于润滑;可设计为整体式以提高全柔性并联机构的整体刚度[5].基于以上优点,柔性并联机构在精密微动平台领域有着较好的应用前景.但是,大多数空间三自由度柔性微动平台只采用压电陶瓷作为驱动器,没有微位移放大机构,造成微动平台工作空间比较小的局限性;本文设计出了一种具有全柔性支链的空间三自由度并联微动平台,并且采用了桥式微位移放大机构对输出位移进行放大,使微动平台的工作空间有了进一步的提高.首先,应用Kutzbach-Grübler 公式对柔性机构的自由度进行了计算;然后,对于支链的设计采用了桥式微位移放大机构,计算了全柔性微动平台的放大比,并应ANSYS及ANSYS workbench 对机构进行了仿真分析.1 微动平台的设计1.1 微动平台的构型3-DOF柔性微动平台采用并联机构,与串联机构相比,并联机构具有刚度大、固有频率高、承载负载能力强以及运动性能好等特点.微动平台的动、平台间通过3个相同的伸缩杆对称连接,与动平台连接的运动副为球副S,与静平台连接的运动副为转动副R,伸缩杆为移动副P,伸缩杆的P副由复合桥式放大机构代替传统的伸缩机构,因此平台可获得更大的工作空间.3-DOF柔性微动平台的简图如图1所示.图1 3-DOF柔性微动平台机构简图Fig.1 Schematic ofa 3-DOF Flexible Micro Motion Platform1.2 微动平台自由度的计算根据 Kutzbach-Grübler公式[6],计算该微动平台的自由度:式中:M表示机构的自由度;n表示包括机架的构件数目;g表示运动副的数目;fi表示第i个运动副的自由度数;μ是机构中全部过约束的总数.计算微动平台的自由度时,构件数n为8,运动副数g为9,机构中过约束的总数μ为0.已知转动副R和移动副P的自由度为1;球副S的自由度为3.除此之外,机构中并无其他约束.可计算微平台的自由度为:所以,微动平台的自由度为3.2 3-DOF柔性微动平台的设计2.1 支链的设计柔性机构是有柔性铰链组成的,柔性铰链是利用弹性材料的微小角变形及其自动回复的特性,消除了传动过程中的空程和机械摩擦,能获得超高的位移分辨率,并有很紧凑的机械结构和很高的刚度,以及迅捷的响应.本文所用的柔性铰链有球铰、直圆型柔性铰链和直梁型柔性铰链.对于移动副的设计,本文采用了桥式位移放大机构作为移动副,这样设计的优点在于使支链的结构更加紧凑,复合桥式位移放大机构具有位移的放大功能,使微动平台能够获得更大的驱动位移,进而使微动平台有更大的工作空间.支链的结构如图2所示.图2 支链Fig.2 The branched chain2.1.1 桥式位移放大机构放大倍数的计算目前,常用的微位移放大机构主要有杠杆式微位移放大机构和桥式微位移放大机构.基于杠杆原理的微位移放大机构结构简单、刚性好、功效比高,理论上可以实现输入输出的线性关系[7].但其一级放大倍数有限,多级杠杆放大机构体积较大,放大比失真严重[8].而根据三角放大原理设计的桥式微位移放大机构具有结构紧凑、易于加工以及具有较高的放大倍数等特点[9].所以,本文选择了桥式微位移放大机构作为移动副.桥式位移放大机构的放大原理如图3所示.根据拓扑结构上的差异,每条桥式机构可看作由两条柔性铰链连接的刚性构件,柔性铰链可看作弹性梁.根据Ke-qi Qi等人的计算方法[10]只分析桥式位移放大机构弹性模型的四分之一即可.如图4所示,A,B为柔性铰链.图3 桥式位移放大机构原理图Fig3 Schematic of ideal model of bridge-type mechanism图4 四分之一桥式机构弹性梁模型Fig.4 Quarter of elastic model of bridge-type mechanism由力的平衡可知.为方便表达,使 FA=FB=F,MA=MB=M,其中 FA,FB为输入力,MA为在力FB作用下铰链A产生的弯矩,MB为在力FA作用下铰链B产生的弯矩.四分之一桥式机构弹性变形如图5所示,则桥式位移放大机构的位移放大倍数可写作:更确切的,某一旋转角度一定发生在柔性铰链和刚性构件之间.桥式机构的局部旋转细节图如图6所示.根据欧拉-伯努利梁理论,变形梁的剖面始终垂直于变形梁的变形轴,可推导出:图5 四分之一桥式机构弹性变形Fig.5 Elastic deformation of quarter model of bridge-type mechanism图6 桥式机构的局部旋转变形细节Fig.6 Local details of rotation of bridge-type mechanism所以,Δθ可由柔性铰链的旋转获得.此外,由于柔性铰链A和柔性铰链B的受力相同,所以,它们的旋转角度是相同的.柔性铰链A的受力分析和变形图如图7所示.图7 柔性铰链A的局部受力分析和变形图Fig.7 Force status and deformationof right-angle flexure hinge根据图7所示的受力分析,可将柔性铰链A看作悬臂梁,基于弹性梁理论,可得以下等式:Kl和Kθ分别表示直角柔性铰链的侧移刚度和旋转刚度.与桥式放大机构的整体尺寸相比,其变形通常是非常小的,也就是说Δθ是非常小的,所以刚性构件旋转的弦长近似等于弧长对应的圆心角Δθ.可根据关系推导出以下公式:由公式(3)和(6)可得桥式位移放大机构的放大倍数表达式:由公式(4)、(5)和(7)可将公式进一步写成:根据弹性梁理论,将直梁型柔性铰链看作是一个6自由度的弹性单元,如图8所示.则柔性铰链的柔度公式为:其中,C为直梁型柔性铰链的柔度矩阵[11],其具体值为:柔度矩阵的逆矩阵为刚度矩阵.其中,E为弹性模量,G为材料的切变模量,k2的值由b/t的值决定.图8 直角柔性铰链的坐标系Fig.8 Coordinate system of right-angle flexure hinge因为只需考虑桥式机构的平面刚度,所以由公式(12)可知直梁型柔性铰链的侧移刚度Kl和旋转刚度Kθ:(13)由公式(8)和(13)可得:桥式微位移放大机构的整体尺寸如图9所示.图9 桥式微位移放大机构的整体尺寸Fig.9 Structural dimensions of bridge-type mechanism由公式(14)可知,桥式位移放大机构只与其平面尺寸有关,即铰链的长度l,两铰链之间的垂直距离h,刚性构件的长度L,以及铰链的厚度t有关,与其厚度b 无关.2.2 3-DOF柔性微动平台3-DOF柔性微动平台由3条相同的柔性支链组成,柔性支链上、下分别连接动平台和静平台,并以120°对称分布,并且与竖直方向成10°角,可实现x和y轴两个方向转动和z轴平动.3-DOF柔性微动平台模型如图10所示.图10 3-DOF柔性微动平台模型Fig.10 A 3-DOF flexible micro motion platform model3 有限元分析为了验证理论分析的正确性,进行有限元分析是十分必要的[12-13].利用SolidWorks12.0软件建立柔性支链的三维模型和3-DOF柔性微动平台模型.并用ANSYS和ANSYS workbench12.0软件进行有限元分析以验证理论分析的正确性. 柔性微动平台所采用的材料为7075航空铝,弹性模量为71.7 GPa,屈服强度为503 MPa,泊松比为0.33,密度为2810 Kg/m3.仿真时,采用德国PI公司生产的P-820.20压电陶瓷,最大输出位移为30 μm,分辨率为0.3nm,刚度为7N/μm,固有频率为15KHz,最大推力为50 N.将桥式位移放大机构和柔性微动平台在SolidWorks12.0中建好模型后,保存为Parasolid格式,分别导入ANSYS和ANSYS workbench中进行仿真.3.1 静力学分析首先,对桥式微位移放大机构进行仿真,为了方便计算,采用智能网格划分,在输入端输入5 μm作为输入位移,仿真结果如图.11所示.输出位移分别为51.44 μm,仿真放大比10.288,误差为2.72%.图11 有限元仿真结果Fig.11 Finite element simulation results然后,利用workbench12.0对柔性微动平台进行静力学分析,在柔性微动平台无负载的情况下分别对其中的一个支链,两个支链和三个支链输入5 μm作为输入位移,仿真结果如图.12(a),(b),(c)所示.输出的最大位移分别为 47.277μm,57.128 μm,42.358 μm.由于支链和竖直方向有10°的夹角,而且虽然在一个支链和两个支链输出的位移,相比于三个支链时输出量偏大,但是在球铰附近的输出位移是几乎相等的.图12 整体有限元仿真结果Fig.12 Overall finite element simulation results所以,仿真的放大比约为8.6,误差为18.7%.4 结论本文设计了一种空间3-DOF全柔性微动平台,将桥式微位移放大机构作为P副,目的是为了增加微动平台的工作空间,并对桥式微位移放大机构的放大比进行了计算和有限元仿真,满足设计要求.该微动平台在设计上加入桥式微位移放大机构是一种结构上的创新,但是其运动空间和工作空间能够增大多少,还需要对微动平台进行运动分析和工作空间的计算,也是下一步工作的核心;同时,该微动平台的设计也为微动平台的设计提供了一种新的方法和新的思路.参考文献:[1]于靖军,裴旭.柔性铰链机构设计方法的研究进展[J].机械工程学报,2010,46(13):1-13.[2]李杨民,汤晖.面向生物医学应用的微操作机器人技术发展态势[J].机械工程学报,2011,47(23):1-13.[3]朱大昌,崔祥府,严智敏,等.3-RPC型并联精密定位机构设计与分析[J].有色金属科学与工程.2012,3(6):100-105.[4]Larry L,pliant mechanisms[M].New York:John Wileyand Sons,2001.[5]张连杰,刘善增,朱真才.柔顺并联机构的研究进展[J].组合机床与自动化加工技术,2011,(7):108-112.[6]黄真,赵永生,赵铁石.高等空间机构学[M]2版.北京:高等教育出版社,2014.[7]丁冰晓,肖霄,李杨民.大行程并联三自由度柔性微操作平台的设计[J].天津理工大学学报,2015,31(4):28-32.[8]王勇,刘志刚,薄锋,等.大行程高分辨率微定位机构的设计分析[J].机械设计,2005,22(1):22-24.[9]叶果,李威,王禹桥,等.柔性桥式微位移机构位移放大比特性研究[J].机器人,2011,33(1):251-256.[10]Ke-qi Qi,Yang Xiang ,Chao Fang,et al.Analysis of the displacement amplification ratio of bridge-type mechanism[J].Mechanism and Machine Theory,2015,87:45-56.[11]Ma S H,Yao S M,Wang L Q,et al.Analysis of the displacement amplification ratio of bridge-type flexure hinge[J].Sensors and Actuators A,2006,132:730-736.[12]Li Y M,HuangJ M,Tang H.A compliant parallel XY micromotion stage with complete kinematic decoupling[J].IEEE Transactions on Automation Science and Engineering,2012,9(3):538-553.[13]XiaoS L,LiY M,Optimal design,fabrication,and control of an XY micropositioning stage driven by electromagnetic actuators [J].IEEE Transactions on Industrial Electronics,2013,60(10):4613-4626.。
