基于VLC的测距算法研究
- 格式:pdf
- 大小:198.30 KB
- 文档页数:3
基于成像的VLC室内定位镜面干扰消除技术泮万盛;侯忆楠;肖石林;杨俊杰【期刊名称】《光通信技术》【年(卷),期】2017(41)8【摘要】针对基于成像的可见光室内定位方案易产生镜面干扰的问题,提出了一种干扰消除技术,根据镜面像点与信标像点相对关系可识别和消除镜面干扰.阐述了定位信标识别方法,分析了图像中定位信标的位置几何关系,搭建了基于到达角度定位算法的实验系统,验证了该技术的可行性和有效性.%This paper proposes a camera-based visible light indoor positioning with specular reflection cancellation to reduce errors due to mirror reflection.The specular reflection is recognized and cancelled based on that relations.The paper describes the principle of LED beacon ID recognition and analyzes the geometrical relations of the beacons and specular points.Results verify the feasibility and effectiveness of the algorithm by establishing the Angle-of-Arrival (AoA)-based experimental measurement system.【总页数】3页(P48-50)【作者】泮万盛;侯忆楠;肖石林;杨俊杰【作者单位】上海交通大学区域光纤通信网与新型光通信系统国家重点实验室,上海200240;上海交通大学区域光纤通信网与新型光通信系统国家重点实验室,上海200240;上海交通大学区域光纤通信网与新型光通信系统国家重点实验室,上海200240;上海电力学院,上海200090【正文语种】中文【中图分类】TN929【相关文献】1.基于LED半功率角的VLC混合室内定位算法研究 [J], 陈行;张月霞2.基于镜面成像技术的三维立体视觉测量与重构综述 [J], 郭伟青;汤一平;鲁少辉;陈麒3.基于VLC与IMU融合的移动物体跟踪室内定位系统 [J], 邹倩;夏玮玮;张静;黄博南;燕锋;沈连丰4.基于VLC的室内定位技术研究 [J], 赵大明;王欣5.基于时空ICA的脑功能成像思维干扰消除 [J], 白保东;刘健;柯丽;郭红宇因版权原因,仅展示原文概要,查看原文内容请购买。
基于VLC的新型无线定位识别系统的设计方案作者:于正永董进徐彤朱东进来源:《电脑知识与技术》2016年第33期摘要:提出一种VLC(可见光通信)新型无线定位识别系统的设计方案。
该系统通过可见光发射机将所要传输的信号进行编码,并调制到可见光光束上进行传输,在接收机上进行了信号的解码、相干解调,并在移动终端设备上自动为使用者播放被识别物的详细信息,实现识别功能,通过网络规划时VLID(可见光标识)所处的平面空间坐标,确定终端持有者所处的实际位置区域,实现无线定位功能。
关键词:VLC;无线定位;识别系统;设计方案;LED中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2016)33-0205-03由于LED功耗低、使用寿命长、电路尺寸小、绿色环保、良好的信号调制功能以及较高的响应灵敏度等特性,因此它不但可以用作日常照明,而且可以通过相应的信号调制技术,将信号调制到可见光束上实现信号传输,使得LED同时具备照明和通信的双重功能。
所谓可见光通信(Visible Light Communication,VLC)就是指运用可见光波段的光作为信息载体,无需光纤等有线信道的传输介质,在自由空间中直接传输光信号的通信方式。
VLC相比于传统无线传输技术[1],具有成本低、传输带宽大、安全性高、不产生电磁干扰和电磁辐射、空间复用性能较好等优势,引起国内外众多学者的关注和研究[2-3]。
1 系统概述基于VLC的新型无线定位识别系统即在需要安装定位识别系统的地方(如各类场馆展区、大型购物中心等)对LED照明系统进行合适的改造,使LED发射的可见光中包含按照一定方式调制的特定的VLID。
当持有移动终端的人员进入某LED光源的有效光照区域时,带有光电二极管探测器(PD)的移动终端将直接接收带识别码的可见光信号,进而解析出可见光特有的VLID,便可在终端中自动为用户播放被识别物的详细信息,包括文字、图片、语音、视频等丰富的多媒体资讯,为用户提供个性化、交互式的多媒体信息服务。
VLC信号的时频域分析算法及实现研究作者:王宇冯进良段靖远来源:《中国新通信》2016年第01期【摘要】此文章的研究基于cotex-m4内核的stm32f407芯片,利用快速傅里叶变换算法,对可见光通信信号进行时域和频域分析,并利用Matlab软件进行仿真对比。
实验结果表明,该算法对硬件要求不高,易于实现,有利于在小型集成设备上实现可见光信号的时频域分析和显示。
【关键词】快速傅里叶变换 Matlab 时频域分析一、引言与普通光源相比,可见光LED有能量损耗低、高亮度、高可靠性和寿命长等许多优点,可见光LED还因其高速调制特性已被应用在可见光通信中(visible light communication,VLC),相比于射频无线通信技术,VLC技术有无需申请频带、无电磁干扰、发射功率高、安全性好和造价低等优点。
目前VLC技术已成为国内外研究的热点,研究过程中,对可见光通信信号的研究与分析是必不可少的。
信号的分析分为时域分析和频域分析两个方面。
时域分析是以时间为自变量描述物理量的变化的过程,是信号最基本、最直观的表达形式,也是真实世界惟一实际存在的域,因而在时域上对信号进行分析必不可少。
频域分析的目的是把复杂的时间历程波形,经过傅里叶变换分解为若干单一的谐波分量来研究,得到动态信号中的各个频率成分和频率分布范围,求出各个频率成分的幅值分布和能量分布,从而给出主要幅度和能量分布的频率值,进而可以对信号的信息作定量解释。
本文主要研究可见光通信信号的时域和频域分析算法及硬件实现,并对所设计的信号分析仪进行实验和仿真对比。
二、信号分析仪的设计LED是单色光源,不能产生包含所有可见光谱的白色光。
现在普遍使用的白色LED利用蓝光LED激发荧光粉形成白光。
分析仪采用脉冲形式的波形作为传输信号,用脉冲重复周期为250ns,脉冲宽度为20ns的信号进行时域脉冲响应分析时,接收端的的脉冲宽度为77ns。
经过VLC信道后,脉冲被展宽非常明显。
基于VLC的室内定位技术研究赵大明;王欣【摘要】VLC是利用白光LED固态光源在照明的同时实现通信的绿色通信技术,基于VLC的室内定位方法具有室内传统无线定位方法难以取代的优势.通过对可见光通信技术的研究,结合定位精度提升算法,将提供低成本、低功耗、高精度、保证照明功能的可见光定位解决方案,并从系统方案与信道模型、信号接收与处理技术、高精度定位算法、图像辅助技术等方面展开研究.【期刊名称】《电信科学》【年(卷),期】2019(035)003【总页数】5页(P122-126)【关键词】可见光通信;室内定位;定位算法【作者】赵大明;王欣【作者单位】北京国电通网络技术有限公司,北京100070;国网物资有限公司,北京100120【正文语种】中文【中图分类】TN929随着无线技术的不断发展,各种基于定位的位置信息服务受到越来越多的重视。
目前,应用最广泛的全球定位系统(global positioning system,GPS)已应用于车辆导航、工程测量、海洋救援、飞机导航、航空遥感等许多领域。
但在人们活动较为频繁的商场、医院、办公楼等室内环境以及隧道、地下停车场等特殊环境,由于无线电信号被遮蔽,GPS等传统卫星定位服务无法正常使用。
现代社会人们大部分的时间都在室内活动,并且随着城市化的发展,人们对室内定位的需求越来越迫切,室内定位系统(indoor position system,IPS)应运而生。
基于LED绿色照明光源的VLC(visible light communication,可见光通信)技术具有频谱宽、绿色节能、布设简单、成本低廉、深度覆盖、可与照明有机结合等突出优点,在室内无线定位领域具有良好的应用前景。
过去几年,基于无线电波技术提出了许多室内定位方案,主要有WLAN、RFID、UWB、Wi-Fi、超声系统、蓝牙等,这些方法提供了从几米到几十厘米的定位精度。
然而,大多数基于无线通信的系统会受到电磁干扰的影响,而且在多个用户共享的情况下通信质量会下降,这些都直接影响了定位质量。

基于OpenCV的摄像头测距的实现⽰例⽬录前⾔⼀、测距原理⼆、代码1.引⼊库2.读⼊数据总结前⾔去年暑假参加了⼀个⽐赛,⽐赛内容中需要确定⽬标的位置本来想全⽤图像完成的,最后发现不是很符合要求。
⽐完赛之后,就忙别的事了。
直到现在突然想试试摄像头测距。
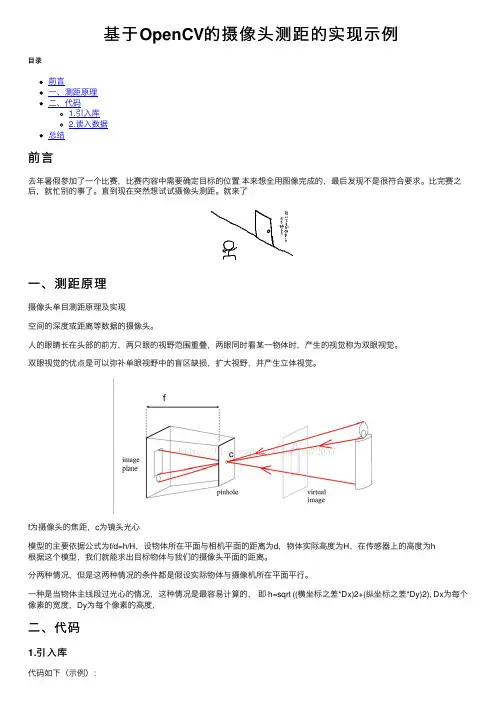
就来了⼀、测距原理摄像头单⽬测距原理及实现空间的深度或距离等数据的摄像头。
⼈的眼睛长在头部的前⽅,两只眼的视野范围重叠,两眼同时看某⼀物体时,产⽣的视觉称为双眼视觉。
双眼视觉的优点是可以弥补单眼视野中的盲区缺损,扩⼤视野,并产⽣⽴体视觉。
f为摄像头的焦距,c为镜头光⼼模型的主要依据公式为f/d=h/H,设物体所在平⾯与相机平⾯的距离为d,物体实际⾼度为H,在传感器上的⾼度为h根据这个模型,我们就能求出⽬标物体与我们的摄像头平⾯的距离。
分两种情况,但是这两种情况的条件都是假设实际物体与摄像机所在平⾯平⾏。
⼀种是当物体主线段过光⼼的情况,这种情况是最容易计算的,即 h=sqrt ((横坐标之差*Dx)2+(纵坐标之差*Dy)2), Dx为每个像素的宽度,Dy为每个像素的⾼度,⼆、代码1.引⼊库代码如下(⽰例):import cv2from cvzone.HandTrackingModule import HandDetectorimport mathimport numpy as npimport cvzone2.读⼊数据调⽤电脑摄像头,或者外接别的摄像头也可以调⽤ cvzone ⾃带的⼿部检测器cap = cv2.VideoCapture(0)cap.set(3, 1280)cap.set(4, 720)detector = HandDetector(detectionCon=0.8, maxHands=1)编写函数,转化为距离循环打印显⽰while True:success, img = cap.read()hands = detector.findHands(img, draw=False)if hands:lmList = hands[0]['lmList']x, y, w, h = hands[0]['bbox']x1, y1 = lmList[5]x2, y2 = lmList[17]distance = int(math.sqrt((y2 - y1) ** 2 + (x2 - x1) ** 2))A, B, C = coffdistanceCM = A * distance ** 2 + B * distance + Cprint(distanceCM, distance)cv2.rectangle(img, (x, y), (x + w, y + h), (255, 0, 255), 3)cvzone.putTextRect(img, f'{int(distanceCM)} cm', (x+5, y-10))cv2.imshow("Image", img)cv2.waitKey(1)完整代码import cv2from cvzone.HandTrackingModule import HandDetectorimport mathimport numpy as npimport cvzonecap = cv2.VideoCapture(0)cap.set(3, 1280)cap.set(4, 720)# Hand Detectordetector = HandDetector(detectionCon=0.8, maxHands=1)# Find Function# x is the raw distance y is the value in cmx = [300, 245, 200, 170, 145, 130, 112, 103, 93, 87, 80, 75, 70, 67, 62, 59, 57] y = [20, 25, 30, 35, 40, 45, 50, 55, 60, 65, 70, 75, 80, 85, 90, 95, 100]coff = np.polyfit(x, y, 2) # y = Ax^2 + Bx + Cwhile True:success, img = cap.read()hands = detector.findHands(img, draw=False)if hands:lmList = hands[0]['lmList']x, y, w, h = hands[0]['bbox']x1, y1 = lmList[5]x2, y2 = lmList[17]distance = int(math.sqrt((y2 - y1) ** 2 + (x2 - x1) ** 2))A, B, C = coffdistanceCM = A * distance ** 2 + B * distance + Cprint(distanceCM, distance)cv2.rectangle(img, (x, y), (x + w, y + h), (255, 0, 0), 3)cvzone.putTextRect(img, f'{int(distanceCM)} cm', (x+5, y-10))cv2.imshow("Image", img)cv2.waitKey(1)效果图:总结通过简单的⼏⾏代码,就可以实现视频测距。
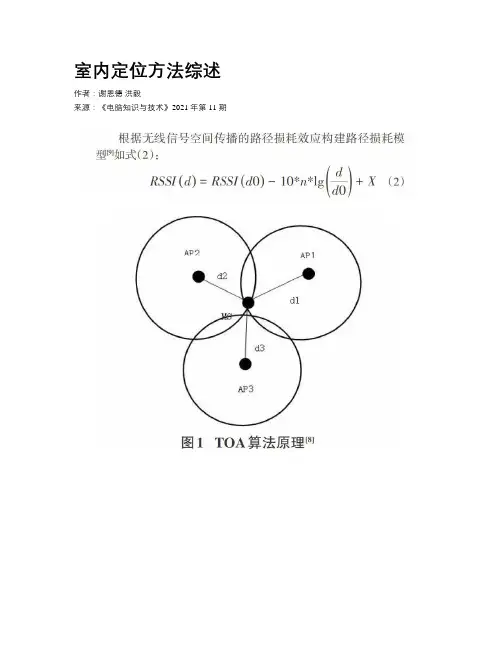
室内定位方法综述作者:谢恩德洪毅来源:《电脑知识与技术》2021年第11期摘要:基于位置的服务应用已经包含了人们生活的方方面面,这也使得人们对位置信息的需求越来越大。
在室外我们可以依赖美国GPS和中国北斗等来获取精确的位置信息,但在复杂的室内环境中,由于卫星信号的极速衰减,无法提供满足人们要求的室内位置信息,同时没有普适性的室内定位解决方案,室内定位仍是研究热点。
文章简单介绍什么是定位,然后对室内定位算法和定位介质进行了分类和简单介绍,最后对不同定位介质从不同方面进行了比较并指出了当前室内定位方案存在的问题。
关键词:基于位置服务;室内定位;定位算法;定位介质中图分类号:TP3 文献标识码:A文章编号:1009-3044(2021)11-0231-04A Survey of Indoor Positioning MethodsXIE En-de, HONG Yi(Faculty of Computers, Guangdong University of Technology, Guangzhou 510006,China)Abstract: Location-based service applications have already included all aspects of people's lives, which makes people's demand for location information more and more. In the outdoor environment, we can rely on GPS and Bei-dou to obtain accurate location information. However,in the complex indoor environment, due to the rapid attenuation of satellite signals, indoor location information that meets people's requirements cannot be provided. Meanwhile, there is no universal indoor location solution, so indoor location is still a research hotspot. Article introduces what is the location, and then to indoor localization algorithm and positioning media has carried on the classification and simple introduction, and finally compares the different positioning media from different aspects and points out the problems existing in the current indoor positioning scheme.Key words: location-based services; indoor positioning; location algorithm; locating medium在过去的几十年间,以美国的全球定位系统(Global Positioning System,GPS)为代表的全球导航卫星系统(Global Navigation Satellite System,GNSS)给人们的日常生活以及思维方式带来了巨大的变化,它是现代社会一个重要的技术里程碑。
基于单目视觉的实时测距方法研究近年来,自动驾驶、无人机等领域的快速发展,对实时测距技术提出了更高的要求。
实时测距是指通过使用单目视觉系统,即利用一台摄像机采集的图像来实现物体到摄像机的距离的实时测量。
目前,实时测距方法主要分为几种:立体视觉法、红外相机法、结构光法等。
其中,基于单目视觉的实时测距方法有着成本低、使用方便等优点,因此备受研究者的关注。
区域方法中常用的测距算法有基于光流的方法和基于重要性采样的方法。
基于光流的方法通过分析同一目标在图像序列中的运动,从而估计物体的距离。
而基于重要性采样的方法则是通过采样图像中的像素点,并利用像素点之间的关系来估计距离。
这两种方法在实时性和准确性上都存在一定的问题,需要进一步的改进。
特征方法中常用的测距算法有基于角点的方法和基于线条的方法。
基于角点的方法通过识别图像中的角点,并计算角点之间的距离来估计物体的距离。
而基于线条的方法则是通过检测图像中的线条,并计算线条的长度来估计物体的距离。
这两种方法的计算复杂度较低,速度较快,但对于复杂场景的测距效果较差。
为了提高基于单目视觉的实时测距方法的准确性和实时性,研究者们进行了一系列的探索。
一种方法是结合多种测距算法,例如结合角点和线条进行测距。
另一种方法是引入深度学习的方法,通过训练神经网络来进行测距。
这些新方法能够显著提高测距的准确性和实时性,但是需要更多的数据和计算资源来支持。
综上所述,基于单目视觉的实时测距方法是现代计算机视觉领域中的热门研究方向。
尽管目前已经存在一些有效的测距方法,但仍然需要进一步的研究和改进来提高准确性和实时性。
随着技术的不断发展,相信基于单目视觉的实时测距方法会在自动驾驶、无人机等领域得到更广泛的应用。
一种基于VLC的室内服务机器人,基于VLC的室内服务机器人采用可见光通信技术进行室内定位,在机器人上安装以下三种传感器,即CMOS摄像头、kinect传感器以及惯性传感器,在这三种传感器上分别编写驱动程序的电路,并且分别与室内服务机器人的定位系统进行定位,其通过卷帘效应以及便字长编码技术,通过光流法、像素坐标与图像坐标转换,最终获得室内机器人产品,相比于其他基于无线通行的定位技术,本申请提出的定位算法建立在已有的照明系统之上,无需附加任何特定的发送模块,并利用服务机器人自带的摄像头实现高精度的成像定位,在增加定位精度的同时,减少系统的投入成本,符合节约型经济的要求。
技术要求1.一种基于VLC的室内服务机器人,其特征是:基于VLC的室内服务机器人采用可见光通信技术进行室内定位,在机器人上安装以下三种传感器,即CMOS摄像头、kinect传感器以及惯性传感器,在这三种传感器上分别编写驱动程序的电路,并且分别与室内服务机器人的定位系统进行定位CMOS摄像头工作原理是:CMOS摄像头安装启动电路,并且利用opencv获得压缩数据,再通过网络或者WIFI将压缩数据传送到定位系统的传输层,并同步进行解码,之后,利用视频驱动,然后对图像进行解码,通过LED灯检测,获得LED灯的ID号,从而获得机器人的位置坐标,再通过定量指标计算,基于粒子滤波算法进行机器人的位置坐标的估计;Kinect传感器工作原理是:Kinect传感器安装启动电路,并且利用cartographer获得压缩数据,再通过网络或者WIFI将压缩数据传送到定位系统的传输层,并同步进行解码,之后,利用视频驱动,然后对图像进行解码,通过特征提取,创建即时地图,从而获得机器人的位置坐标,再通过定量指标计算,基于粒子滤波算法进行机器人的位置坐标的估计;惯性传感器工作原理是:惯性传感器安装启动电路,并且利用卡尔曼获得测量信息,再通过网络或者WIFI将压缩数据传送到定位系统的传输层,并对测量信息进行信号处理,之后,更新位姿信息,再通过航迹推算,基于粒子滤波算法进行机器人的位置坐标的估计。
电子科技大学2012级本科毕业设计(论文)开题报告表只有这样计算机才能运行。
为使更多的人能使用复杂的计算机,必须改变过去的那种让人来适应计算机,来死记硬背计算机的使用规则的情况。
而是反过来让计算机来适应人的习惯和要求,以人所习惯的方式与人进行信息交换,也就是让计算机具有视觉、听觉和说话等能力。
这时计算机必须具有逻辑推理和决策的能力。
具有上述能力的计算机就是智能计算机。
智能计算机不但使计算机更便于为人们所使用,同时如果用这样的计算机来控制各种自动化装置特别是智能机器人,就可以使这些自动化系统和智能机器人具有适应环境,和自主作出决策的能力。
这就可以在各种场合取代人的繁重工作,或代替人到各种危险和恶劣环境中完成任务。
3、课题研究内容将计算机视觉和图像处理技术应用到车辆驾驶辅助系统当中可以有效地为车辆行驶提供安全保障。
而在计算机视觉中,利用视觉信息感知环境,由单幅二维投影图像确定目标与装载摄像机物体之间距离信息的研究,是目前智能交通系统(ITS)和智能车辆系统(IVS)的关键技术之一。
本文主要研究针对ITS和IVS的单目视觉测距方法。
基于单目视觉的测量技术是从计算机视觉领域中发展起来的新型非接触测量技术,它是一种结合图像处理技术,把图像当作检测和传递信息的手段或载体而加以利用的测量方法。
本文利用投影几何原理和图像处理方法研究了单目测距算法,重点研究了摄像机标定技术、图像预处理方法、障碍物体检测及计算障碍物体距离的算法。
本文首先采用了一种在照、摄像机内外部参数未知的条件下,利用图像平面中的平行线,以及它们形成的消隐点具有几何约束关系来实现摄像机标定的新方法。
该方法与以前方法相比,计算复杂性不高,但相对而言,准确性和鲁棒性较高,且无须在使用前标定相机,更符合实际需要(因现今的照、摄像机都是变焦距的),从而具有广泛的推广价值。
其次,对多种图像预处理方法进行了分析、比较和选择,采用的方法兼顾了图像处理效果和实时性要求。
基于系统物理参数测量和几何关系的车辆定位
张钰;李毅
【期刊名称】《无线电工程》
【年(卷),期】2024(54)1
【摘要】对采用可见光通信(Visible Light Communication,VLC)的车辆定位方法进行了研究,研究、分析并比较了4种基于VLC的车辆定位方法;基于假设的系统模型和接收到的VLC信号数学模型,分析了每种方法所采用的TX位置与系统物理参数的测量过程,利用这些参数与TX位置之间的几何关系构成一个观测模型,获得车辆位置估计;基于VLC定位方法的观测模型得到每种方法关于位置精度的Cramer-Rao下界(Cramer-Rao Lower Bound,CRLB);在一般有限传播延迟、视距(Line of Sight,LoS)和加性高斯白噪声(Additive White Gaussian Noise,AWGN)的VLC 信道模型下,对于真实道路的避碰和列队行驶场景,仿真了每种方法的系统物理参数测量,并基于测量结果,对每种方法的定位精度的CRLB进行了评价。
【总页数】10页(P173-182)
【作者】张钰;李毅
【作者单位】山西职业技术学院电子与通信工程系;山西财经大学信息学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于CCD测量车辆轮对轮缘的几何参数
2.基于GNSS定位技术的轨道几何参数测量方法
3.车辆组合导航定位系统中测量元件的参数修正
4.基于卫星定位技术的车辆横向稳定性参数的测量
5.智能技术助推教师课堂教学行为评价的应用框架研究
因版权原因,仅展示原文概要,查看原文内容请购买。