线控转向系统上课讲义
- 格式:ppt
- 大小:1022.00 KB
- 文档页数:36




可编辑修改精选全文完整版线控转向系统(SBW,Steering-by-wire)一、功能简介(1)取消了转向盘和转向轮之间的机械连接,减轻了大约5 kg重量;(2)消除了路面的冲击,具有降低噪声和隔振等优点。
(3)为今后的辅助驾驶系统和无人驾驶汽车的研发提供技术支持。
优点:①取消转向柱、转向器后,有利于提高汽车碰撞安全性和整车主动安全性。
②提高了整车设计自由度,便于操控系统布置。
例如没有了机械连接,可以很容易把左舵驾驶换为右舵驾驶。
③转动效率高,响应时间短。
控制单元接收各种数据,可以在瞬时转向条件下,立刻提供转向动力,转动车轮。
④改善驾驶特性,增强操纵性。
基于车速、牵引力控制以及其它相关参数基础上的转向比率(转向盘转角和车轮转角的比值)不断变化,低速行驶时,转向比率低,可以减少转弯或停车时转向盘转动的角度;高速行驶时,转向比率变大,能够获得更好的直线行驶条件。
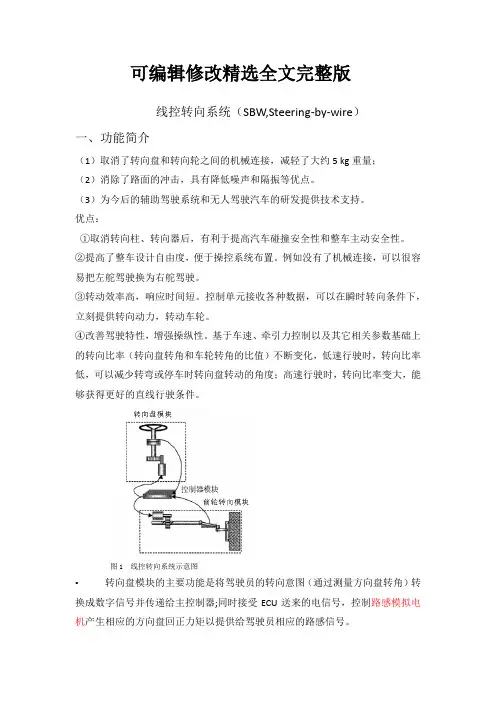
图1 线控转向系统示意图•转向盘模块的主要功能是将驾驶员的转向意图(通过测量方向盘转角)转换成数字信号并传递给主控制器;同时接受ECU送来的电信号,控制路感模拟电机产生相应的方向盘回正力矩以提供给驾驶员相应的路感信号。
•前轮转向模块包括前轮转角传感器、转向执行电机、转向电机控制器和前轮转向组件等。
转向执行模块的功能是接受ECU的命令,控制转向执行电机实现要求的前轮转角,完成驾驶员的转向意图。
•ECU对采集的信号进行分析处理,判别汽车的运动状态,向方向盘回正力电机和转向电机发送命令,控制两个电机的工作。
二、基本要求1、路感模拟电机涉及驱动程序的开发要求转向操纵轻便。
根据光洋转向试验室的经验数据,对于轻型轿车,在现实中作用于方向盘的回正力矩值一般在2-3Nm左右,其最值也不会超过5Nm;根据美国国家公路交通安全管理局(NHTSA)的调查,驾驶员在进行紧急避让的时候,方向盘转速最大为1.5r/S (轿车),一般情况下,方向盘平均转速为:500°/s。
汽车转向系统与维修讲义课件1. 简介汽车转向系统是指控制汽车前轮方向的系统,主要用于改变车辆行驶方向。
本讲义将介绍汽车转向系统的基本原理以及常见故障的排查与维修方法。
2. 汽车转向系统的组成汽车转向系统由以下几个组件组成:2.1 转向盘转向盘是驾驶员用于控制车辆方向的手柄,通过转动转向盘来改变前轮的方向。
2.2 转向柱转向柱连接转向盘和转向齿轮,将驾驶员的转向输入传递给转向齿轮。
2.3 转向齿轮转向齿轮是转向系统的核心部件,将来自转向柱的转向输入传递给悬挂系统,从而改变车辆的行驶方向。
2.4 转向拉杆转向拉杆将转向齿轮的转动转化为前轮的转向运动,通过推拉活塞来使前轮产生转向。
2.5 前轮悬挂系统前轮悬挂系统支撑前轮并使其能够在转向时产生转动。
3. 汽车转向系统的工作原理汽车转向系统的工作原理可以分为以下几个步骤:3.1 驾驶员输入转向指令驾驶员通过转动转向盘来输入转向指令。
3.2 转向柱传递转向输入转向柱将转向盘的转动传递给转向齿轮,同时将转向锁定器解除,以便方便转向控制。
3.3 转向齿轮转化转向输入转向齿轮将转向柱传递的转向输入转化为推拉活塞的运动,从而改变前轮的转向。
3.4 前轮转向推拉活塞的运动使转向拉杆产生位移,进而改变前轮的转向角度。
3.5 前轮转向影响车辆行驶方向通过改变前轮的转向角度,转向系统实现了对车辆行驶方向的控制。
4. 汽车转向系统常见故障排查与维修4.1 方向盘打滑4.1.1 故障现象方向盘转动时感觉有滑动,转向操纵失去精度。
4.1.2 可能原因•转向柱、转向齿轮和转向拉杆连接处润滑不足•转向柱部件磨损•转向齿轮磨损•转向拉杆松脱4.1.3 排查与维修方法•检查转向柱部件是否需要更换或润滑•检查转向齿轮是否磨损或需要更换•检查转向拉杆是否松脱或需要调整4.2 方向失灵4.2.1 故障现象转向盘无法控制车辆方向,转向操纵失效。
4.2.2 可能原因•转向柱断裂•转向齿轮损坏•转向拉杆断裂4.2.3 排查与维修方法•检查转向柱是否完好并进行更换•检查转向齿轮是否损坏并进行更换•检查转向拉杆是否断裂并进行更换5. 总结汽车转向系统是控制车辆行驶方向的重要系统,它由转向盘、转向柱、转向齿轮、转向拉杆和前轮悬挂系统等多个组件组成。
线控转向系统教案教案标题:线控转向系统教案教学目标:1. 了解线控转向系统的基本原理和功能;2. 掌握线控转向系统的构成和工作原理;3. 能够分析和解决线控转向系统故障;4. 提高学生的实际操作能力和技术能力。
教学内容:1. 线控转向系统的基本概念和作用;2. 线控转向系统的构成和工作原理;3. 线控转向系统的维护和故障分析。
教学步骤:1. 导入(5分钟):引导学生回顾汽车的转向系统和传统机械转向的特点,并介绍线控转向系统的基本概念和作用。
2. 理论讲解(15分钟):a. 详细介绍线控转向系统的构成,包括转向手柄、转向链条/杆、转向齿轮、转向传感器等组成部件;b. 解释线控转向系统的工作原理,包括转向手柄的操作信号转换、转向链条/杆的传递、转向齿轮的旋转等过程;c. 分析线控转向系统常见的故障原因,如传感器失效、链条/杆断裂等。
3. 实操演示(20分钟):a. 将一辆装备有线控转向系统的模拟汽车引入教室,并介绍各个组成部件的位置和功能;b. 请一名学生当场操作线控转向系统,展示操作过程和效果;c. 引导其他学生观察和分析操作过程中可能出现的故障或问题。
4. 实践训练(25分钟):a. 将学生分组,每个小组配备一辆模拟汽车和相应的维修工具;b. 指导学生进行线控转向系统的实践操作,包括检查各个组成部件的工作状态,模拟故障排查和修复等;c. 鼓励学生在操作中积极思考和交流,提高实际操作能力和技术能力。
5. 总结(5分钟):对本节课的主要内容进行总结,强调线控转向系统的重要性和学习的关键点,鼓励学生继续深入学习和实践。
教学资源:1. 模拟汽车引入教室;2. 线控转向系统相关图纸和说明书;3. 维修工具和设备;4. 相关故障案例和解决方法的资料。
教学评估:1. 观察学生在实操演示和实践训练中的表现,评估其对线控转向系统的理解和操作能力;2. 组织小组讨论,让学生分享实践过程中遇到的问题和解决方法;3. 设计简单的问答或练习题,测试学生对线控转向系统的掌握程度。
线控转向系统(SBW)在车辆高速化、驾驶人员大众化、车流密集化的今天,针对更多不同水平的驾驶人群,汽车的易操纵性设计显得尤为重要.线控转向系统(Steering-By-Wire Systerm,简称SBW)的发展,正是满足这种客观需求。
它是继EPS后发展起来的新一代转向系统,具有比EPS操纵稳定性更好的特点,它取消转向盘与转向轮之间的机械连接,完全由电能实现转向,彻底摆脱传统转向系统所固有的限制,提高了汽车的安全性和驾驶的方便性。
5.1线控转向系统的构成SBW系统一般由转向盘模块、转向执行模块和主控制器ECU、自动防故障系统以及电源等模块组成。
转向盘模块包括路感电机和转向盘转角传感器等,转向盘模块向驾驶员提供合适的转向感觉(也称为路感)并为前轮转角提供参考信号。
转向执行模块包括转向电机、齿条位移传感器等,实现2个功能:跟踪参考前轮转角、向转向盘模块反馈轮胎所受外力的信息以反馈车辆行驶状态.主控制器控制转向盘模块和转向执行模块的协调工作。
5。
2线控转向系统的工作原理当转向盘转动时,转向传感器和转向角传感器检测到驾驶员转矩和转向盘的转角并转变成电信号输入到ECU,ECU根据车速传感器和安装在转向传动机构上的位移传感器的信号来控制转矩反馈电动机的旋转方向,并根据转向力模拟,生成反馈转矩,控制转向电动机的旋转方向、转矩大小和旋转角度,通过机械转向装置控制转向轮的转向位置,使汽车沿着驾驶员期望的轨迹行驶。
5.3线控转向系统特点(1)取消了方向盘和转向车轮之间的机械连接,通过软件协调它们之间的运动关系,因而消除了机械约束和转向干涉问题,可以根据车速和驾驶员喜好由程序根据汽车的行驶工况实时设置传动比.(2)去掉了原来转向系统各个模块之间的刚性机械连接,采用柔性连接,使转向系统在汽车上的布置更加灵活,转向盘的位置可以方便地布置在需要的位置。
(3)提高了汽车的操纵性.由于可以实现传动比的任意设置,并针对不同的车速,转向状况进行参数补偿,从而提高了汽车的操纵性.(4)改善驾驶员的“路感”。
汽车线控转向系统的结构与技术原理分析一、线控转向系统的结构及工作原理(一)线控转向系统的结构汽车线控转向系统主要由转向盘模块、前轮转向模块、主控制器(ECU)以及自动防故障系统组成。
1.转向盘模块转向盘模块包括转向盘组件、转向盘转角传感器、力矩传感器、转向盘回正力矩电机。
其主要功能是将驾驶员的转向意图(通过测量转向盘转角)转换成数字信号并传递给主控制器,同时主控制器向转向盘回正力矩电机发送控制信号,产生转向盘回正力矩,以提供给驾驶员相应的路感信息。
2.前轮转向模块前轮转向模块包括前轮转角传感器、转向执行电机、电机控制器和前轮转向组件等。
其功能是将测得的前轮转角信号反馈给主控制器,并接受主控制器的命令,控制转向盘完成所要求的前轮转角,实现驾驶员的转向意图。
3.主控制器主控制器对采集的信号进行分析处理,判别汽车的运动状态,向转向盘回正力矩电机和转向电机发送命令,控制两个电机协调工作。
主控制器还可以对驾驶员的操作指令进行识别,判定在当前状态下驾驶员的转向操作是否合理。
当汽车处于非稳定状态或驾驶员发出错误指令时,前轮线控转向系统将自动进行稳定控制或将驾驶员错误的转向操作屏蔽,以合理的方式自动驾驶车辆,使汽车尽快恢复到稳定状态。
4.自动防故障系统自动防故障系统是线控转向系统的重要模块,它包括一系列的监控和实施算法,针对不同的故障形式和故障等级做出相应的处理,以求最大限度的保持汽车的正常行驶。
线控转向技术采用严密的故障检测和处理逻辑,以最大程度地提高汽车安全性能。
(二)线控转向系统的工作原理其工作过程:来自转向盘传感器和各种车辆当前状态的信息送给电子控制子系统后,利用计算机对这些信息进行控制运算,然后对车辆转向子系统发出指令,使车辆转向。
同时车轮转向子系统中的转向阻力传感器给出的信息也经电子控制子系统,传给转向盘子系统中模拟路感的部件。
二、线控转向系统的性能特点由于线控转向系统中的转向盘和转向轮之间没有机械连接,是断开的,通过总线传输必要的信息,故该系统也称作柔性转向系统。