外转子无刷直流电机的工作原理图
- 格式:doc
- 大小:260.50 KB
- 文档页数:3
普通直流电动机得电枢在转子上,而定子产生固定不动得磁场。
为了使直流电动机旋转,需要通过换向器与电刷不断改变电枢绕组中电流得方向,使两个磁场得方向始终保持相互垂直,从而产生恒定得转矩驱动电动机不断旋转。
无刷直流电动机为了去掉电刷,将去,而,这样得结构正好与普通直流电动机相反;然而,即使这样改变还不够, 因为定子上得电枢通过直流电后,只能产生不变得磁场, 电动机依然转不起来。
为了使电动机转起来,必须使,这样才干使定子磁场随着转子得位置在不断地变化,使定子磁场与转子永磁磁场始终保持摆布得空间角,产生转矩推动转子旋转。
无刷直流电动机由电动机主体与驱动器组成,就是一种典型得机电一体化产品。
ﻫ电动机得定子绕组多做成三相对称星形接法, 同三相异步电动机十分相似。
电●动机得转子上粘有已充磁得永磁体,为了检测电动机转子得极性,在电动机内装有位置传感器。
驱动器由功率电子器件与集成电路等构成,其功能就是:接受电动机得启动、住手、制动信号, 以控制电动机得启动、住手与制动;接受位置传感器信号与正反转信号,用来控制逆变桥各功率管得通断,产生连续转矩;接受速度指令与速度反馈信号,用来控制与调整转速;提供保护与显示等等。
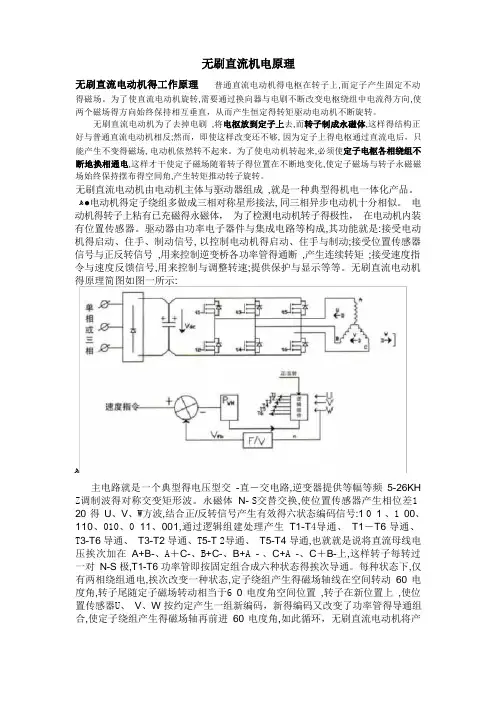
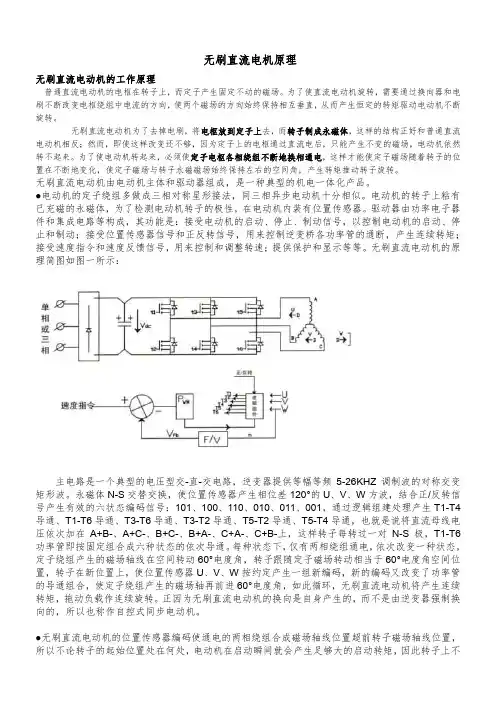
无刷直流电动机得原理简图如图一所示:ﻫ主电路就是一个典型得电压型交-直-交电路,逆变器提供等幅等频5-26KH Z调制波得对称交变矩形波。
永磁体N- S交替交换,使位置传感器产生相位差1 20°得U、V、W方波,结合正/反转信号产生有效得六状态编码信号:1 0 1 、1 00、110、010、0 11、001,通过逻辑组建处理产生T1-T4导通、T1-T6 导通、T3-T6 导通、T3-T2 导通、T5-T 2导通、T5-T4 导通,也就就是说将直流母线电压挨次加在A+B-、A+C-、B+C-、B+A - 、C+A -、C+B-上,这样转子每转过一对N-S 极,T1-T6 功率管即按固定组合成六种状态得挨次导通。
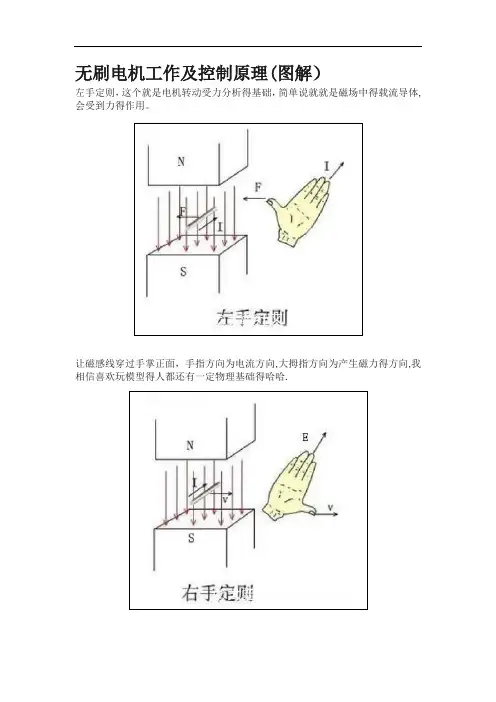
无刷电机工作及控制原理(图解)左手定则,这个就是电机转动受力分析得基础,简单说就就是磁场中得载流导体,会受到力得作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力得方向,我相信喜欢玩模型得人都还有一定物理基础得哈哈.让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生得电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似得经历,把电机得三相线合在一起,用手去转动电机会发现阻力非常大,这就就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生与转动方向相反得力,大家就会感觉转动有很大得阻力。
不信可以试试.三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指得那一端就就是通电螺旋管得N极。
状态1当两头得线圈通上电流时,根据右手螺旋定则,会产生方向指向右得外加磁感应强度B(如粗箭头方向所示),而中间得转子会尽量使自己内部得磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受得转动力矩最大.注意这里说得就是“力矩”最大,而不就是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩就是力与力臂得乘积。
其中一个为零,乘积就为零了.当转子转到水平位置时,虽然不再受到转动力矩得作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管得电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管得电流方向,内转子就会不停转起来了。
改变电流方向得这一动作,就叫做换相。
补充一句:何时换相只与转子得位置有关,而与其她任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子得三相绕组有星形联结方式与三角联结方式,而“三相星形联结得二二导通方式”最为常用,这里就用该模型来做个简单分析。

图文讲解无刷直流电机的工作原理电动无刷直流电机由电动机主体和驱动器组成导读:,是一种典型的机电一体化产品。
同三相异步电动机十分相似。
它的应用非常广泛,,机的定子绕组多做成三相对称星形接法在很多机电一体化设备上都有它的身影。
什么是无刷电机?无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
由于无刷所以不会像变频调速下重载启动的同步电机那样在转子上另直流电动机是以自控式运行的,加启动绕组,也不会在负载突变时产生振荡和失步。
中小容量的无刷直流电动机的永磁体,稀土永磁无刷电动机的体积比材料。
因此,现在多采用高磁能级的稀土钕铁硼(Nd-Fe-B)同容量三相异步电动机缩小了一个机座号。
. . .无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传无换向火花、机械噪声低等优点,广泛应用于统的接触式换向器和电刷。
它具有可靠性高、高档录音座、录像机、电子仪器及自动化办公设备中。
无刷直流电动机由永磁体转子、多极绕组定子、位置传感器等组成。
位置传感按转子(即检测转子磁极相对定子绕组的位位置的变化,沿着一定次序对定子绕组的电流进行换流按并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关电路,置,定子绕组的工作电压由位置传感器输出控制的电子开。
一定的逻辑关系进行绕组电流切换)关电路提供。
位置传感器有磁敏式、光电式和电磁式三种类型。
采用磁敏式位置传感器的无刷直流电动机,其磁敏传感器件(例如霍尔元件、磁敏二极管、磁敏诂极管、磁敏电阻器或专用集成电路等)装在定子组件上,用来检测永磁体、转子旋转时产生的磁场变化。
采用光电式位置传感器的无刷直流电动机,在定子组件上按一定位置配置了光电传感器件,转子上装有遮光板,光源为发光二极管或小灯泡。
转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇间生脉冲信号。
(例是在定子组件上安装有电磁传感器部件采用电磁式位置传感器的无刷直流电动机,谐振电路等),当永磁体转子位置发生变化时,电磁效应将如耦合变压器、接近开关、LC 使电磁传感器产生高频调制信号(其幅值随转子位置而变化)。
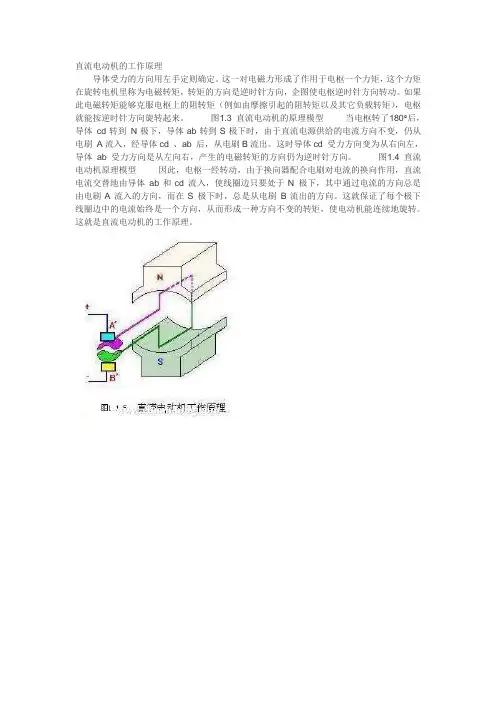
直流电动机的工作原理
导体受力的方向用左手定则确定。
这一对电磁力形成了作用于电枢一个力矩,这个力矩在旋转电机里称为电磁转矩,转矩的方向是逆时针方向,企图使电枢逆时针方向转动。
如果此电磁转矩能够克服电枢上的阻转矩(例如由摩擦引起的阻转矩以及其它负载转矩),电枢就能按逆时针方向旋转起来。
图1.3 直流电动机的原理模型当电枢转了180°后,导体cd转到N极下,导体ab转到S极下时,由于直流电源供给的电流方向不变,仍从电刷A流入,经导体cd 、ab 后,从电刷B流出。
这时导体cd 受力方向变为从右向左,导体ab 受力方向是从左向右,产生的电磁转矩的方向仍为逆时针方向。
图1.4 直流电动机原理模型因此,电枢一经转动,由于换向器配合电刷对电流的换向作用,直流电流交替地由导体ab和cd 流入,使线圈边只要处于N 极下,其中通过电流的方向总是由电刷A 流入的方向,而在S 极下时,总是从电刷B流出的方向。
这就保证了每个极下线圈边中的电流始终是一个方向,从而形成一种方向不变的转矩,使电动机能连续地旋转。
这就是直流电动机的工作原理。
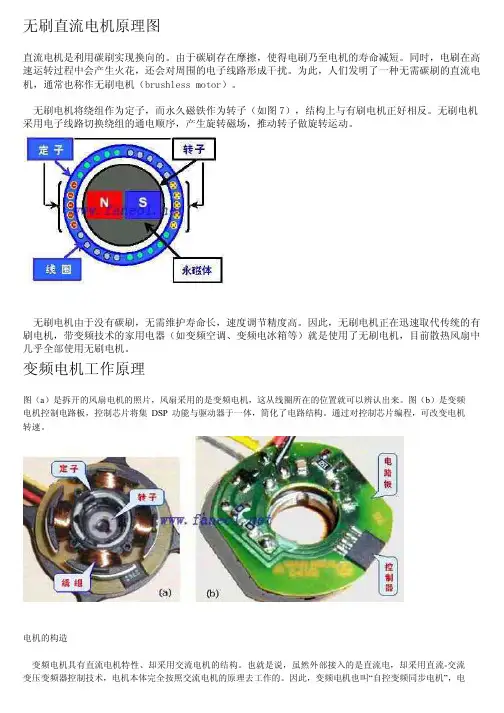
无刷直流电机原理图直流电机是利用碳刷实现换向的。
由于碳刷存在摩擦�使得电刷乃至电机的寿命减短。
同时�电刷在高速运转过程中会产生火花�还会对周围的电子线路形成干扰。
为此�人们发明了一种无需碳刷的直流电机�通常也称作无刷电机�b r u s h l e s s m o t o r�。
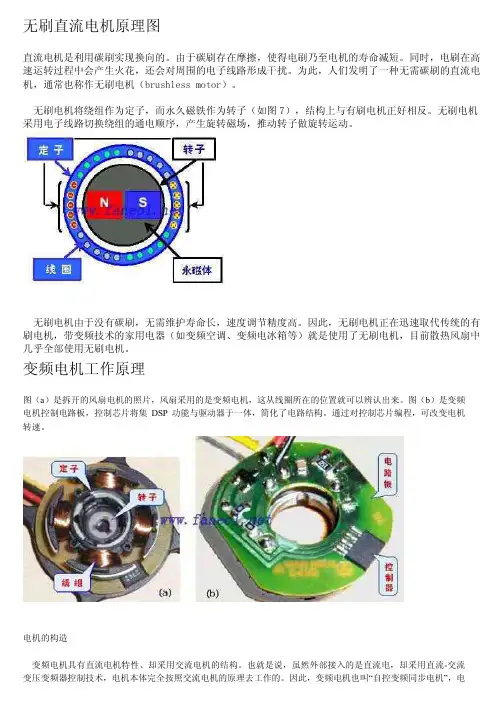
无刷电机将绕组作为定子�而永久磁铁作为转子�如图7��结构上与有刷电机正好相反。
无刷电机采用电子线路切换绕组的通电顺序�产生旋转磁场�推动转子做旋转运动。
无刷电机由于没有碳刷�无需维护寿命长�速度调节精度高。
因此�无刷电机正在迅速取代传统的有刷电机�带变频技术的家用电器�如变频空调、变频电冰箱等�就是使用了无刷电机�目前散热风扇中几乎全部使用无刷电机。
变频电机工作原理图�a�是拆开的风扇电机的照片�风扇采用的是变频电机�这从线圈所在的位置就可以辨认出来。
图�b�是变频电机控制电路板�控制芯片将集D S P功能与驱动器于一体�简化了电路结构。
通过对控制芯片编程�可改变电机转速。
电机的构造变频电机具有直流电机特性、却采用交流电机的结构。
也就是说�虽然外部接入的是直流电�却采用直流-交流变压变频器控制技术�电机本体完全按照交流电机的原理去工作的。
因此�变频电机也叫“自控变频同步电机”�电动机的转速n取决于控制器的所设定的频率f。
图是三相星形接法的变频电机控制电路�直流供电经M O S管组成的三相变流电路向电机的三个绕组分时供电。
每一时刻�三对绕组中仅有一对绕组中有电流通过�产生一个磁场�接着停止向这对绕组供电�而给相邻的另一对绕组供电�这样定子中的磁场轴线在空间转动了120°�转子受到磁力的作用跟随定子磁场作120°旋转。
将电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上�定子中便形成旋转磁场�于是电机连续转动。
附件7.j p g(39.97K B)2008-6-2723:41T O P 变频电机的电路组成为了对风扇电机的运行状况进行监控�需要从风扇电机向主板输出速度信号�实现风扇运行情况的监控。
无刷直流电机原理无刷直流电动机的工作原理普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。
为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。
无刷直流电动机为了去掉电刷,将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。
为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。
无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
●/反转信T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。
每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电度角,转子跟随定子磁场转动相当于60°电度角空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电度角,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。
正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。
需另设启动绕组。
由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。
电动机的转矩正比于绕组平均电流;TM=Ktlav(N?M)电动机两相组反电势的差比于电动机的角速度;ELL=Keω(V)所以电动机绕组中的平均电流为:Iav=(Vm-ELL)/2Ra(A)其中,Vm=δ?VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。
直流无刷电机在各个方面得到广泛的应用,处处都可以见到它们的踪影,种类也很繁多,因为本人从事的是电动车方面的行业,故在这里我们主要讲讲电动车上直流无刷电机的原理和控制它的结构图如下:(这是一个小型直流无刷电机的结构图,是本人根据实物,用WINDOWS画图板一笔一画绘制,发了不少心血,未经同意,不得转载)当然电动车上的无刷电机线圈更多,不过和下面介绍的原理是一样的。
这样做的目的是为了简化,同时也是为了使大家更易于理解。
其实无刷电机的原理很简单,概括的说就是:当给内置霍耳传感器接通电源时,这些霍耳传感器将信号输入到控制器其实这些信号间接反映了转子所处的位置控制器对这些信号经过判断之后,作出相应的输出,并给相应的线圈通电,通电产生了磁场。
因为同性相斥,异性想吸的原理,定子和转子就相对移动。
普通无刷电机的定子是线圈(上面连有霍耳传感器),于是转子(磁钢及轮子)受迫转动。
转子一转动,内置霍耳传感器的输出信号便发生改变,控制器又输出不同方向的电流而该输出产生的磁场又刚好再次和固定磁场(磁钢)同性相斥,异性相吸,结果再次迫使转子转动,接着霍耳传感器的输出信号又再次发生改变.......这样周而复使,轮子就不断转动(每次霍耳信号改变,控制器产生的电流方向要与电机所要求的一致才行,也就是相序要匹配,轮子才会朝一个方向运动)。
文笔不好,概括不全,请大家莫怪。
电机内部霍耳传感器的正电源线即红线一般接5-12v直流电。
而以5V居多。
霍耳的信号线传递电机里面磁钢相对于线圈的位置,根据三个霍耳的信号控制器能知道此时应该如何给电机的线圈供电(不同的霍耳信号,应该给电机线圈提供相对应方向的电流),就是说霍耳状态不一样,线圈的电流方向不一样。
二,无刷电机的运行原理霍耳信号传递给控制器,控制器通过电机相线(粗线,不是霍耳线)给电机线圈供电,电机旋转,磁钢与线圈(准确的说是缠在定子上的线圈,其实霍耳一般安装在定子上)发生转动,霍耳感应出新的位置信号,控制器粗线又给电机线圈重新改变电流方向供电,电机继续旋转(线圈和磁钢的位置发生变化时,线圈必须对应的改变电流方向,这样电机才能继续向一个方向运动,不然电机就会在某一个位置左右摆动,而不是连续旋转),这就是电子换相。
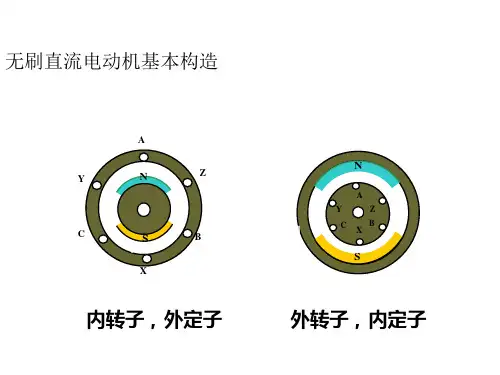
图文讲解无刷直流机电的工作原理之答禄夫天创作时间:二O二一年七月二十九日导读:无刷直流机电由电念头主体和驱动器组成,是一种典范的机电一体化产物. 电念头的定子绕组多做成三相对称星形接法,同三相异步电念头十分相似.它的应用非常广泛,在很多机电一体化设备上都有它的身影.什么是无刷机电?无刷直流机电由电念头主体和驱动器组成,是一种典范的机电一体化产物.由于无刷直流电念头是以自控式运行的,所以不会像变频调速下重载启动的同步机电那样在转子上另加启动绕组,也不会在负载突变时发生振荡和失步.中小容量的无刷直流电念头的永磁体,现在多采纳高磁能级的稀土钕铁硼(NdFeB)资料.因此,稀土永磁无刷电念头的体积比同容量三相异步电念头缩小了一个机座号.无刷直流电念头是采纳半导体开关器件来实现电子换向的,即用电子开关器件取代传统的接触式换向器和电刷.它具有可靠性高、无换向火花、机械噪声高等优点,广泛应用于高档录音座、录像机、电子仪器及自动化办公设备中.无刷直流电念头由永磁体转子、多极绕组定子、位置传感器等组成.位置传感按转子位置的变动,沿着一定次第对定子绕组的电流进行换流(即检测转子磁极相对定子绕组的位置,并在确定的位置处发生位置传感信号,经信号转换电路处置后去控制功率开关电路,按一定的逻辑关系进行绕组电流切换).定子绕组的工作电压由位置传感器输出控制的电子开关电路提供.位置传感器有磁敏式、光电式和电磁式三种类型.采纳磁敏式位置传感器的无刷直流电念头,其磁敏传感器件(例如霍尔元件、磁敏二极管、磁敏诂极管、磁敏电阻器或专用集成电路等)装在定子组件上,用来检测永磁体、转子旋转时发生的磁场变动.采纳光电式位置传感器的无刷直流电念头,在定子组件上按一定位置配置了光电传感器件,转子上装有遮光板,光源为发光二极管或小灯胆.转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇间生脉冲信号.采纳电磁式位置传感器的无刷直流电念头,是在定子组件上装置有电磁传感器部件(例如耦合变压器、接近开关、LC谐振电路等),当永磁体转子位置发生变动时,电磁效应将使电磁传感器发生高频调制信号(其幅值随转子位置而变动).看看这个工程师怎么说?首先给年夜家复习几个基础定章:左手定章、右手定章、右手螺旋定章.别懵逼,我下面会给年夜家解释.左手定章,这个是机电转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用.让磁感线穿过手掌正面,手指方向为电流方向,年夜拇指方向为发生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈.右手定章,这是发生感生电动势的基础,跟左手定章的相反,磁场中的导体因受到力的牵引切割磁感线发生电动势.让磁感线穿过掌心,年夜拇指方向为运动方向,手指方向为发生的电动势方向.为什么要讲感生电动势呢?不知道年夜家有没有类似的经历,把机电的三相线合在一起,用手去转念头电会发现阻力非常年夜,这就是因为在转念头电过程中发生了感生电动势,从而发生电流,磁场中电流流过导体又会发生和转动方向相反的力,年夜家就会感觉转动有很年夜的阻力.不信可以试试.三相线分开,机电可以轻松转动三相线合并,机电转动阻力非常年夜右手螺旋定章,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么年夜拇指所指的那一端就是通电螺旋管的N极.这个定章是通电线圈判断极性的基础,红色箭头方向即为电流方向.看完了三年夜定章,我们接下来先看看机电转动的基来源根基理.第一部份:直流机电模型我们找到一个中学物理学过的直流机电的模型,通过磁回路分析法来进行一个简单的分析.状态1当两头的线圈通上电流时,根据右手螺旋定章,会发生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向坚持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了.当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最年夜.注意这里说的是“力矩”最年夜,而不是“力”最年夜.固然,在转子磁场与外部磁场方向一致时,转子所受磁力最年夜,但此时转子呈水平状态,力臂为0,固然也就不会转动了.弥补一句,力矩是力与力臂的乘积.其中一个为零,乘积就为零了.当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不竭改变两头螺线管的电流方向,内转子就会不竭转起来了.改变电流方向的这一举措,就叫做换相.弥补一句:何时换相只与转子的位置有关,而与其他任何量无直接关系.第二部份:三相二极内转子机电一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为经常使用,这里就用该模型来做个简单分析.上图显示了定子绕组的联结方式(转子未画出假想是个二极磁铁),三个绕组通过中心的连接点以“Y”型的方式被联结在一起.整个机电就引出三根线A, B, C.当它们之间两两通电时,有6种情况,分别是AB, AC, BC, BA, CA, CB注意这是有顺序的.下面我看第一阶段:AB相通电当AB相通电,则A极线圈发生的磁感线方向如红色箭头所示,B 极发生的磁感线方向如图蓝色箭头所示,那么发生的合力方向即为绿色箭头所示,那么假设其中有一个二极磁铁,则根据“中间的转子会尽量使自己内部的磁感线方向与外磁感线方向坚持一致”则N极方向会与绿色箭头所示方向重合.至于C,暂时没他什么事.第二阶段:AC相通电第三阶段:BC相通电第三阶段:BA相通电为了节省篇幅,我们就纷歧一描述CA\CB的模型,年夜家可以自己类推一下.以下为中间磁铁(转子)的状态图:每个过程转子旋转60度六个过程即完成了完整的转动,其中6次换相.第三部份:三相多绕组多极内转子机电我们再来看一个复杂点的,图(a)是一个三相九绕组六极(三对极)内转子机电,它的绕组连线方式见图 (b).从图(b)可见,其三相绕组也是在中间点连接在一起的,也属于星形联结方式.一般而言,机电的绕组数量都和永磁极的数量是纷歧致的(比如用9绕组6极,而不是6绕组6极),这样是为了防止定子的齿与转子的磁钢相吸对齐.其运动的原则是:转子的N极与通电绕组的S极有对齐的运动趋势,而转子的S极与通电绕组的N极有对齐的运动趋势.即为S与N相互吸引,注意跟之前的分析方法有一定的区别.好吧,还是再帮年夜家分析一下吧,第一阶段:AB相通电第二阶段:AC相通电第三阶段:BC相通电第四阶段:BA通电第五阶段:CA通电第六阶段:CB通电以上为六个分歧的通电状态,其中经历了五个转动过程.每个过程为20度.第四部份:外转子无刷直流机电看完了内转子无刷直流机电的结构,我们来看外转子的.其区别就在于,外转子机电将原来处于中心位置的磁钢做成一片片,贴到了外壳上,机电运行时,是整个外壳在转,而中间的线圈定子不动.外转子无刷直流机电较内转子来说,转子的转动惯量要年夜很多(因为转子的主要质量都集中在外壳上),所以转速较内转子机电要慢,通常KV值在几百到几千之间.也是航模主要运用的无刷机电顺便啰嗦一下吧.无刷机电KV值界说为:转速/V,意思为输入电压每增加1伏特,无刷机电空转转速增加的转速值.比如说,标称值为1000KV的外转子无刷机电,在11伏的电压条件下,最年夜空载转速即为:11000rpm(rpm的含义是:转/分钟).同系列同外形尺寸的无刷机电,根据绕线匝数的几多,会暗示出分歧的KV特性.绕线匝数多的,KV值低,最高输出电流小,扭力年夜;绕线匝数少的,KV值高,最高输出电流年夜,扭力小.我先前测试过穿越机2204机电的极限电流,单机电能彪上25A,而2212系列机电15A都上不了.外转子无刷直流机电的结构:分析方法也和内转子机电类似,年夜家可以自己分析一下,根据右手螺旋定理判断线圈的N/S极,转子永磁体的N极与定子绕组的S极有对齐(吸引)的趋势,转子永磁体的S极与定子绕组的N极有对齐(吸引)的趋势,从而驱念头电转动.经典无刷机电2212 1000kv机电结构分析.图为DJI 2312S机电和XXD 2212机电的(解剖图)其结构如下:定子绕组固定在底座上,转轴和外壳固定在一起形成转子,拔出定子中间的轴承.图为xxd2212线圈拆解图图为12绕组14极(即7对极),机电绕组绕发图.后面画出了6种两相通电的情形,可以看出,尽管绕组和磁极的数量可以有许多种变动,但从电调控制的角度看,其通电次第其实是相同的,也就是说,不论外转子还是内转子机电,都遵循AB>AC>BC>BA>CA>CB的顺序进行通电换相.固然,如果你想让机电反转的话,电子方法是按倒过来的次第通电;物理方法直接对换任意两根线,假设A和B对换,那么顺序就是BA>BC>AC>AB>CB>CA,年夜家有没有发现这里顺序就完全倒过来了.AB相通电AC相通电BC相通电BA相通电CA相通电CB相通电要说明一下的是,由于每根引出线同时接入两个绕组,所以电流是分两路走的.这里为使问题尽量简单化,下面几个图中只画出了主要一路的电流方向,还有一路电流未画出,另一路电流的具体情况放在后面进行分析,涉及到电路检测换相位置.。
外转子直流无刷电机工作原理
外转子直流无刷电机的工作原理主要基于磁场和电流的作用。
电机由定子、转子、定子绕组、转子绕组和电源组件等组成。
当电源给定子绕组供电时,定子绕组会产生一个旋转的磁场。
这个旋转的磁场会对转子绕组产生作用,使得转子绕组中产生电流。
这个电流进而会产生磁力,使得转子有转动的动力。
具体来说,外转子直流无刷电机中的外转子(也即电机的外壳)是旋转的部分,而与电源直接相连的定子部分则固定不动。
这种设计使得电机的转动部分质量较大,从而有较大的转动惯量,能够满足一些需要高负载平滑运行的设备需求,如家电设备等。
外转子直流无刷电机通常采用PWM(脉宽调制)控制技术来调节电机的转速,从而控制电机的输出。
这种控制技术可以精确地调节电机的运行状态,使得电机能够根据实际需求进行高效的控制。
此外,外转子直流无刷电机还有一系列的优点,例如转矩响应速度快、抗干扰性强、功率调节范围大、噪声低、可靠性高、操作方便以及节能环保等。
然而,它的成本也相对较高,并且如果电机的转子部分暴露在室外,可能会受到恶劣环境的影响,从而影响电机的使用寿命。
以上内容仅供参考,如需更全面准确的信息,可以查阅电机学相关书籍或咨询电机领域的专家。
第1讲无刷直流电动机控制的关键技术1.1无刷直流电动机结构无刷直流电动机是由电动机本体、转子位置传感器和电子开关线路三部分组成,其结构图如图1-1 所示。
图中,直流电源通过开关电路向电动机定子绕组供电,位置传感器随时检测到转子所处的位置,并根据转子的位置信号来控制开关管的导通和截止,从而自动地控制了哪些绕组通电,哪些绕组断电,实现了电子换相。
图1-1 无刷直流电动机结构图图中1为1.2 无刷直流电动机控制系统工作原理图1-2 无刷直流电动机的工作原理示意图如图1-2所示为一无刷直流电动机控制系统的工作原理。
通过安装在直流无刷电动机上的位置传感器测量电动机的转速并将其与给定速度进行比较,得到系统速度偏差。
根据系统速度偏差值的大小,通过相应的控制调节算法调节电动机电枢端电压的大小,使得电动机依照给定的速度运行。
相应的控制系统方框图如图1-3所示。
图1-3 无刷直流电动机控制系统方框图1.3 无刷直流电动机控制器原理PID 控制算法是指依照系统偏差的比例,积分和微分的线性组合进行控制的方法[25]。
PID 控制算法依托其结构简单,鲁棒性较好,可靠性高,参数易于整定的特点,在工业控制中得到了广泛地运用。
近50年来,90%以上的工业控制器均采用了PID 控制算法。
在模拟系统中PID 控制算法的表达式如式(1-1)所示。
0()1()(()())tD PID P I T de t U t k e t e t dt T dt =++⎰ (1-1)其中,U p 为PID 控制算法输出量,e(t)为系统偏差值,K p 为系统比例系数,T i 为系统积分时间常数,T d 为系统微分时间常数。
计算机控制从本质上来说是一种采样控制,需要根据当前时刻系统的采样偏差值计算相应的控制输出量。
在计算机控制系统中,式(1-1)所描述的模拟PID 控制算法不能直接使用,需对其采用离散化的方法进行处理。
一般情况下,可以通过一系列大量的单位时间采样点kT 模拟系统连续时间段[t0,t1];通过矩形法数值积分近似系统积分过程;通过一阶后向差分取代系统微分过程。