M12n第十二章动态优化模型
- 格式:ppt
- 大小:5.12 MB
- 文档页数:53
第6章 动态规划动态规划(Dynamic Programming )是解决多阶段决策过程最优化的一种有用的数学方法。
它是由美国学者Richard .Bellman 在1951年提出的,1957年他的专著《动态规划》一书问世,标志着运筹学的一个重要分支-动态规划的诞生.动态规划也是一种将多变量问题转化为单变量问题的一种方法。
在动态规划中,把困难的多阶段决策问题变换成一系列相互联系的比较容易的单阶段问题一个个地求解。
动态规划是考察解决问题的一种途径 ,而不是一种特殊的算法,不像线性规划那样有统一的数学模型和算法(如单纯形法).事实上,在运用其解决问题的过程中还需要运用其它的优化算法。
因此,动态规划不像其它方法局限于解决某一类问题,它可以解决各类多阶段决策问题。
动态规划在工程技术、经济管理等社会各个领域都有着广泛的应用,并且获得了显著的效果。
在经济管理方面,动态规划可以用来解决最优路径问题、资源分配问题、生产调度问题、库存管理问题、排序问题、设备更新问题以及生产过程最优控制问题等,是经济管理中一种重要的决策技术。
许多规划问题用动态规划的方法来处理,常比线性规划或非线性规划更有效。
特别是对于离散的问题,由于解析数学无法发挥作用,动态规划便成为了一种非常有用的工具。
动态规划可以按照决策过程的演变是否确定分为确定性动态规划和随机性动态规划;也可以按照决策变量的取值是否连续分为连续性动态规划和离散性动态规划。
本教材主要介绍动态规划的基本概念、理论和方法,并通过典型的案例说明这些理论和方法的应用。
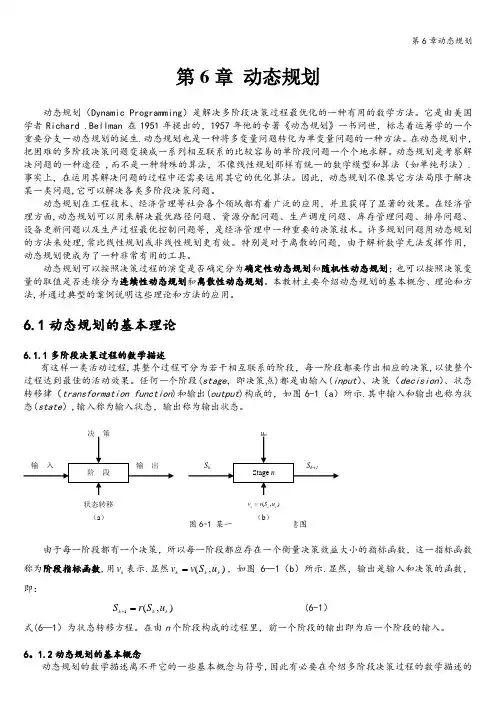
6.1动态规划的基本理论6.1.1多阶段决策过程的数学描述有这样一类活动过程,其整个过程可分为若干相互联系的阶段,每一阶段都要作出相应的决策,以使整个过程达到最佳的活动效果。
任何一个阶段(stage ,即决策点)都是由输入(input )、决策(decision )、状态转移律(transformation function )和输出(output )构成的,如图6-1(a )所示.其中输入和输出也称为状态(state ),输入称为输入状态,输出称为输出状态。
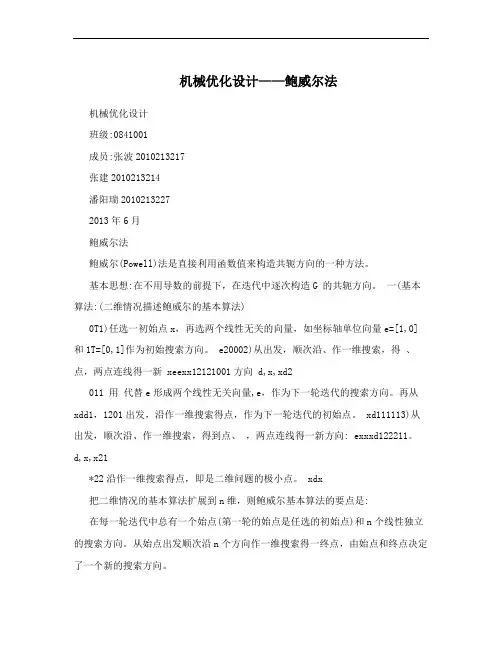
机械优化设计——鲍威尔法机械优化设计班级:0841001成员:张波2010213217张建2010213214潘阳瑞20102132272013年6月鲍威尔法鲍威尔(Powell)法是直接利用函数值来构造共轭方向的一种方法。
基本思想:在不用导数的前提下,在迭代中逐次构造G 的共轭方向。
一(基本算法:(二维情况描述鲍威尔的基本算法)0T1)任选一初始点x,再选两个线性无关的向量,如坐标轴单位向量e=[1,0]和1T=[0,1]作为初始搜索方向。
e20002)从出发,顺次沿、作一维搜索,得、点,两点连线得一新 xeexx12121001方向 d,x,xd2011 用代替e形成两个线性无关向量,e,作为下一轮迭代的搜索方向。
再从xdd1,1201出发,沿作一维搜索得点,作为下一轮迭代的初始点。
xd111113)从出发,顺次沿、作一维搜索,得到点、,两点连线得一新方向: exxxd122211。
d,x,x21*22沿作一维搜索得点,即是二维问题的极小点。
xdx把二维情况的基本算法扩展到n维,则鲍威尔基本算法的要点是:在每一轮迭代中总有一个始点(第一轮的始点是任选的初始点)和n个线性独立的搜索方向。
从始点出发顺次沿n个方向作一维搜索得一终点,由始点和终点决定了一个新的搜索方向。
用这个方向替换原来n个方向中的一个,于是形成新的搜索方向组。
替换的原则是去掉原方向组的第一个方向而将新方向排在原方向的最后。
此外规定,从这一轮的搜索终点出发沿新的搜索方向作一维搜索而得到的极小点,作为下一轮迭代的始点。
这样就形成算法的循环。
图1.二维情况下的鲍威尔法二(改进算法在鲍威尔基本算法中,每一轮迭代都用连结始点和终点所产生出的搜索方向去替换原向量组中的第一个向量,而不管它的“好坏”,这是产生向量组线性相关的原因所在。
在改进的算法中首先判断原向量组是否需要替换。
如果需要替换,还要进一步判断原向量组中哪个向量最坏,然后再用新产生的向量替换这个最坏的向量,以保证逐次生成共轭方向。

汽车零部件Milk-run车辆调度优化模型和算法王旭;陈栋;王振锋【摘要】为了寻求汽车零部件采用循环取货时车辆的最优路径,提出将每个供应商零部件循环、分批提取使车辆尽可能满载的建模思路,建立具有车辆容积、车辆到达时间窗、供应商供货动态时间窗、车辆最大行程约束的车辆调度优化模型,设计了用于求解该模型的改进启发式节约算法.最后通过算例验证了多重约束模型及算法的有效性.%To seek the optimal path for the vehicles to take delivery of auto parts under the Milk-mn, a modeling idea that each components supplier's spare parts were delivered by the way of circular and batch delivery to make as full use of the vehicle as possible was put forward.The optimizing model of vehicle routing problem was established with the constraints of vehicle cubage, arriving time window, supplier supplying dynamic time window and maximum running distance.After that, a heuristic saving algorithm ( or C-W algorithm) was designed to provide a solution to the model.Finally, one example was given to prove the validity of the modeland algorithm.【期刊名称】《计算机应用》【年(卷),期】2011(031)004【总页数】5页(P1125-1128,1132)【关键词】循环取货;动态时间窗;满载提取;启发式节约算法【作者】王旭;陈栋;王振锋【作者单位】重庆大学,贸易与行政学院,重庆,400030;重庆大学,机械工程学院,重庆,400030;重庆大学,机械工程学院,重庆,400030【正文语种】中文【中图分类】TP301.60 引言目前,国内越来越多的汽车制造企业开始专注于企业上游零部件供应物流整合管理服务的第三方物流集配中心(supply-hub)[1],对于物料需求计划 (Material Requirement Planning,MRP)中的需求零部件采取与第三方物流企业合作共同引进Milk-run,Milk-run又叫循环取货、牛奶式取货、集货配送等,是制造企业为了降低整条供应链的物流成本、提高车辆装载率和物料供应的敏捷性而采用的一种优化的进料物流模式。
收稿日期:2017-09-28基金项目:国家自然科学基金资助项目(51675422,51475366,51475146);高等学校博士学科点专项科研基金资助项目(20116118110005)0引言大型复杂结构体中广泛存在着各种类型的结合部,其中,螺栓结合部装拆方便、安全可靠,在机械结构中最为常见。
螺栓结合部是指由螺栓紧固连接的两子结构间相互接触的部分。
螺栓结合部的建模精度在整机动态性能的预测研究中至关重要,因为结合部的存在会导致结合区域处局部刚度的衰减和阻尼的增加,进而改变整机模型的动态性能[1]。
研究结果表明,机床结构动力学建模误差主要来源于结合部的模型误差[2⁃5]。
研究和解决螺栓结合部接触面域的融合绑定建模方法崔方圆华灯鑫李言孔令飞李鹏阳西安理工大学机械与精密仪器工程学院,西安,710048摘要:为提升复杂结构体模型在线动态监测与实时更新的精度,提出了一种螺栓结合部接触面域的融合绑定建模方法。
建模过程中,由配对子结构在接触面两侧各提供一部分单元组成接触面域单元,通过对该区域单元进行等效处理,使其满足各向同性条件,而接触面域单元之间则被构建为融合绑定接触连接。
该建模方法最大的优点是可以有效避免增加结合部模型求解的自由度数,节约计算资源且参数识别方便,通用性较强。
为保证计算模型与物理模型具有协调一致的精度,建模过程中考虑了螺栓螺母及传感器附加质量对建模精度的影响,并引入多目标遗传算法对结合部的物理表征参数进行了优化识别。
结果表明:前6阶实验振型和仿真振型完全一致,相应固有频率相对误差的绝对值均在10%以内,说明该建模方法能够较为有效地解决工程实际中结合部的动力学建模问题。
关键词:螺栓结合部;融合绑定;模态分析;参数识别中图分类号:TH113.1;O327DOI :10.3969/j.issn.1004⁃132X.2018.16.004开放科学(资源服务)标识码(OSID):A Merged Binding Modeling Method for Contact Fields of Bolted JointsCUI FangyuanHUA DengxinLI YanKONG LingfeiLI PengyangSchool of Mechanical and Precision Instrument Engineering ,Xi ’an Universityof Technology ,Xi ’an ,710048Abstract :A merged binding modeling method for contact areas of bolted joints was presented in or⁃der to improve the accuracy of on⁃line dynamic monitoring and real⁃time updating of large⁃scale complex structures ’models.During the modeling processes ,the contact field elements were constructed by sepa⁃rating a part of elements from the two mating substructures at each side of the interfaces.The elements in the contact regions would meet the isotropic conditions after a equivalent treatment ,and a merged binding contact relationship was established among the elements.The greatest advantage of this modeling method is timesaving because it may effectively avoid increasing the numbers of degrees of freedom in the joint model.Moreover ,this method is more universal with advantages of convenience in parameter identifica⁃tion.In the interest of the consistent accuracy between the calculation model and the physical model ,the effects of additional masses of bolts ,nuts and sensors on modeling accuracy were taken into account to⁃gether with an optimization and identification of physical characterization parameters of bolted joints based on multi ⁃objective genetic algorithm.The results show that the first six order theoretical mode shapes are in excellent coherence with their experimental counterparts ,and the absolute values of the rela⁃tive errors of corresponding natural frequency are less than 10%,which shows the proposed modeling method may effectively solve the dynamic modeling problems of joints in engineering practices.Key words :bolted joint ;merged binding ;modal analysis ;parameteridentification第29卷第16期2018年8月中国机械工程CHINA MECHANICAL ENGINEERINGVol.29No.16pp.1912⁃1920··1912螺栓结合部接触面域的融合绑定建模方法——崔方圆华灯鑫李言等如何精确、高效地构建合理的结合部模型有助于提升大型复杂结构动力学模型的建模精度,并为研究和预测复杂结构体的动态特征与性能评价奠定基础。
2012年三峡杯重庆三峡学院数学建模竞赛承诺书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则•我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的,如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B/C/D中选择一项填写): A ________ 我们的参赛报名号为(如果赛区设置报名号的话):_________________________ 所属学校(请填写完整的全名):____________ 重庆三峡学院__________________ 参赛队员(打印并签名):1. ____________ 齐财华_________________________2. __________ 侯景耀_________________________3. __________ 廖友芳_________________________指导教师或指导教师组负责人(打印并签名):________________日期:2012 年9 月_日赛区评阅编号(由赛区组委会评阅前进行编号):2012三峡杯重庆三峡学院数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):赛区评阅记录(可供赛区评阅时使用):全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号物流管理问题的优化模型摘要本文主要对物流管理过程中的优化问题进行了研究。
制定订货策略是商业公司生产销售过程中的重要环节,因此对物流管理过程中的优化问题进行研究有助于提高公司的物流管理水平,使公司获得最优的运作效果,从而获得最佳的社会效益和经济效益。
残差修正灰色GM(1,1)模型的优化及在桥梁线性控制中的应用李自林;寇天旺【摘要】由于传统残差修正灰色GM(1,1)模型建模时背景值权重系数的选取和初始条件的选取均采用假设值,故以自动寻优定权的方法对残差修正模型背景值构造进行优化,以最小二乘法对初始条件的选取进行优化,建立优化后的模型.将该优化模型应用于商合杭高速铁路跨G50高速公路挂篮悬臂施工预应力混凝土连续梁桥线性控制,研究模型应用情况及优化效果.结果表明:通过该方法对大跨度连续梁桥施工进行线性控制,主梁各测点的成桥实际高程测试结果与各测点设计值直接误差均小于允许误差值,最大值为8 mm,主梁线形平顺,预测效果优于未优化模型.【期刊名称】《天津城建大学学报》【年(卷),期】2018(24()03)【总页数】6页(P191-195)【关键词】残差修正灰色模型;优化;线性控制;挠度预测【作者】李自林;寇天旺【作者单位】天津城建大学土木工程学院,天津300384;天津城建大学土木工程学院,天津300384;【正文语种】中文【中图分类】U442.2大跨度连续梁悬臂施工法是由零号块处沿轴线方向对连续梁分段浇筑的方法.采用悬臂施工的大跨度连续梁桥施工节段多,施工周期长,加上模板定位、变形误差和预应力筋损失等已知的误差,收缩徐变以及人为观测误差等未知的误差引起的挠度和应力变化,使得大跨度连续梁桥施工过程具有全程不确定性和随机性.同时在整个施工过程中经历混凝土浇筑、挂篮移动及预应力筋张拉的体系转变,结构施工产生的挠度值是动态变化的.线性监控是对连续梁桥在不同施工阶段的实际施工状态进行监控,识别施工的实际状态并根据目标状态时时调整下一梁段的施工.对连续梁轴线线形进行控制的方法有卡尔曼滤波法[1]、BP神经网络法[2]、灰色控制理论等.灰色系统理论[3]是研究广泛存在的灰色系统的一种新理论.近些年来,灰色系统理论逐渐在桥梁建设中扮演愈加重要的角色,应用形式主要为以灰色系统理论为原理,建立灰色系统预测模型,通过已浇筑梁段测试数据作为资料,实现未浇筑梁段的挠度值预测.灰色GM(1,1)模型通过灰色生成可以将无规律数据通过数据列运算生成规律性较强的数据列,以此来减弱数据的随机性[4].将离散的数据序列看作是连续函数在变化过程中的离散值,通过差分方程与微分方程间的互换建立连续的动态微分方程[5].1 残差修正GM(1,1)模型残差修正GM(1,1)模型是将灰微分方程的解与一次累加值相减得到残差,并再次使用灰色GM(1,1)模型求解残差预测差值,利用预测差值修正一次预测值得到最终预测值.假设原始序列为n元数列灰色生成最常用的是累加生成的方法.将n元数列X(0)(k)通过累加运算得到一次累加值X(1)(k)利用一次累加序列建立灰微分方程式中:未知量a为发展灰数;未知量u为灰色作用量.引入灰微分方程的背景值式中:μ 称为权重系数,μ∈[0,1].假定μ取值0.5,则求解方程(1)得到原始序列X(0)与一次累加序列X(1)满足根据最小二乘法求解式(5)可得将式(6)所得参数代入到灰微分方程式(1)继续求解可得为求解常数c,需要设定初始条件.假定初始条件为则将常数值c代入公式(7),灰微分方程的响应式为记残差序列取残差序列k0到n作为原始序列ε(0)(k)进行一次累加得到利用ε(1)建立 GM(1,1)模型响应式为残差修正表达式为2 残差修正GM(1,1)模型的优化2.1 优化方法在建模过程中,有两次假设:①构造背景值时,假定权重系数μ取值0.5.②在求解微分方程时,假定X(0)(1)作为初始条件.传统的灰色GM(1,1)模型的背景值构造方式是通过一次累加序列的紧邻数据均值生成,但尚无法从理论上证明其建模精度较高.刘寒冰等[6]针对传统多变量灰色模型背景值构造方式的缺陷,通过指数函数拟合了一次累加序列,改进了背景值构造方式,并成功应用在路基沉降观测中.王强[7]经过理论研究,提出了一种新的动态定权方法,并在高边坡变形预测中取得了较好效果.樊新海[8]采用了计算机技术,提出了一种计算机自动寻优确定权重系数的方法,建立了GMP(1,1)模型,并通过实例验证了其有效性.传统灰色GM(1,1)模型以X(0)(1)作为初始条件对灰微分方程进行求解,即响应方程的解(1)(k)过点(1,X(0)(1)).张大海[9]指出灰色GM(1,1)模型是用指数曲线按照最小二乘法拟合X(1)(k),拟合的结果应满足并分别以原始序列{X(0)(k)}中n个元素作为响应式的初始条件进行预测,使结果误差最小的X(0)(k)的值作为求解微分方程的初始条件.杨华龙[10]认为由于数据采集存在不确定性,导致{X(0)(k)}中的数据本身就存在误差,使预测误差达到最小的初始条件并不一定是序列{X(0)(k)}中的值,可采用最小二乘法原理利用原始序列与预测序列差的平方和达到最小来确定初始条件c.2.2 优化后残差修正GM(1,1)模型建立本文将采用自动寻优方法确定该背景值权重系数的选取,采用该最小二乘法对初始条件进行优化.构造背景值时,涉及两个过程的优化:一是求解灰微分方程过程时背景值的构造及初始条件的选取;二是对残差改正值的预测时的背景值构造及初始条件的选取.首先令μ=0,给其增加一个微量Δμ,即μ=μ+Δμ,将其代入背景值表达式求出对应背景值,直至μ=1.这样得出背景值表达式式中:μ∈[0,1].将带有μ的背景值表达式代入Y=B,求解出a及u,可得到灰微分方程的解将进行一次累减,得到预测值令H=c·(1-ea),将 H 代入灰微分方程(7),得到已知根据最小二乘法,利用X(0)(k)与(0)(k)差的平方和S达到最小值时来定H取值.其中对S进行求导,当时,S取得最小值.此时利用X(1)(k)与生成序列作差得到残差序列ε(0),取其尾段序列为原始序列构造背景值为GM(1,1)模型响应式为将还原得到根据最小二乘法,利用与ε(0)(k)差的平方和S最小来确定Hε取值.求得(0)(k+1)即为残差修正值.3 工程应用3.1 模型建立商合杭高速铁路跨G50高速连续梁跨径形式为48 m+80 m+48 m预应力连续梁.主梁采用挂篮悬臂浇筑法施工,零号块两侧各为10个施工块,第11号块为合龙块,支座处零号块长8 m,其余悬臂梁段长度为3.5 m至4 m.浇筑完毕及张拉预应力筋完毕后,每一节段混凝土自重荷载、所受外部荷载及预应力均会发生不同程度变化,且存在施工误差,伴随着混凝土收缩徐变效应,已浇筑梁段的变形具有随机性及不确定性,符合灰色系统建模的特征.故桥线形采用灰色控制理论进行控制,利用已浇筑梁段理论变形值和实测变形值之差作为残差修正GM(1,1)模型原始序列对未浇筑梁段标高进行预测.为确定每节梁段的理论变形值,利用MIDAS/Civil有限元软件建立连续梁三维有限元模型,该模型单元类型为变截面三维梁单元,共划分346个单元,347个节点,共分为15个工况进行变形计算,连续梁计算模型如图1所示.为测定每节梁段变形实测值,在每节梁段端部截面处设置一组位移测试截面,零号块支座处布置一处测试截面,沿横桥向布置3个测点,全梁一共50个测试截面,150个测点.图1 MIDAS有限元模型3.2 优化后残差修正GM(1,1)模型应用为研究优化后的残差修正GM(1,1)模型在连续梁悬臂施工线形控制中的应用效果,以34#墩大里程方向7#梁块施工变形预测为例,分析优化后的残差修正灰色模型在桥梁线性控制中的应用情况.现浇段的立模标高值按如下公式计算式中:H立为浇筑段的立模标高;H设为梁段的设计标高值;fi为每一节段的预抛高值.fi可以根据下式计算式中:f自为施工节段自重及后续节段混凝土自重所产生的变形值;f预为预应力束的张拉锚固梁段产生的变形值;f挂篮为该梁段挂篮变形值;fx为混凝土收缩徐变、温度、二期恒载、施工荷载、结构体系转变对梁段产生的变形值;f静为静活载作用于梁段产生的位移.利用灰色模型对梁段变形值进行预测实际上是对未浇梁段预抛高值进行预测.将立模标高值加上预抛高调整值,可得到调整后的立模标高值.采用2#梁块至6#梁块预应力张拉结束后理论变形值与实测变形值为原始序列.6#梁块浇筑完成且预应力张拉锚固结束,已浇筑完成梁段得到变形理论值与实际测试值见表1.表1 34#墩各梁段变形值mm注:“-”表示向下.梁段号理论值实测值差值2-0.32 -1.36 1.04 3-0.68 -3.25 2.57 4-1.50 -4.39 2.89 5-2.66 -6.48 3.82 6-4.30 -9.59 5.29将差值 X(0)=(1.04,2.57,2.89,3.82,5.29)建立优化后的残差修正模型,利用自动寻优定权法求得当μ=0.469时,X(0)与序列残差平方和最小.此时求得a=-0.264 6及u=1.770 2.未进行残差修正的灰色模型表达式为6.690 1,求解出由可得ε(0)(k)为(0.228 2,0.067 3,-0.087 8,0.023 1),此时 k 取值为 2,3,4,5.取系数为1对ε(0)(k)进行非负化处理,可得到序列ε(0)(k)=(1.2282,1.0673,0.9122,1.0231).当μ=0.502 0时,ε(0)(k)与二者残差平方和最小,此时a=0.0230,u=1.0643,GM(1,1)模型响应式为求得,并将其还原可得残差预测值以此修正值对一次预测值进行修正可得由以上计算可知,7#梁段浇筑完成后,所产生的理论挠度值与实际挠度值差值的预测值为-6.703 5 mm.7#梁段理论变形值为-6.550 0 mm,故7#梁段实际变形的预测值为-6.550 0-6.703 5=-13.253 5 mm.而实际浇筑7#梁段完成后,测得7#梁段实测变形值为-12.60 mm,预测值与实测值相差0.65 mm,预测效果较好. 结合优化后残差修正GM(1,1)模型建立等维新陈代谢模型[11],即每去掉一节段早期浇筑梁块竖向实测值与理论值差值数据,便加入一节段新浇筑梁块挠度数据,保持数据等维.以此对34#大里程方向未浇筑梁段将要产生的挠度值进行预测,预测结果如表2所示.表2 优化后残差修正模型预测结果mm梁段号实测值理论值预测值差值7 -12.60 -6.55 -13.25 0.65 8 -17.57 -11.10 -19.80 1.61 9 -22.23 -16.58 -24.50 2.28 10 -29.52 -23.85 -30.20 0.68通过表2可以看出,优化后的残差修正GM(1,1)模型对剩余未浇筑梁块的变形预测值均接近于实际变形值,剩余未浇梁段中实际值与预测值差值最大仅为2.28 mm,证明优化后的模型对未浇筑梁段预抛高值预测效果较好,可以利用模型对未浇筑梁段预抛高进行预测.通过建立传统灰色残差修正GM(1,1)模型对34#大里程方向未浇筑梁段将要产生挠度值进行预测,预测结果如表3.表3 传统残差修正模型预测结果mm梁段号实测值理论值预测值差值7 -12.60 -6.55 -13.40 0.80 8 -17.57 -11.10 -19.25 1.68 9 -22.23 -16.58 -24.54 2.31 10 -29.52 -23.85 -30.29 0.76通过对比表2、表3可以发现34#墩大里程方向7,8,9,10号梁块采用优化后的残差修正模型比未优化模型预测误差差值分别为0.15,0.07,0.03,0.08mm,优化后模型预测误差均小于传统模型,预测效果较优.从整体预测结果来看,两种模型预测误差差值并不大,这是因为该数据列原始序列与预测序列差的平方和达到最小时,权重系数μ接近0.5.但经过优化以后,模型背景值与初始条件更加具有确定性,比使用假设值更加具有说服力.在连续梁施工过程中,采用优化后的模型对未浇筑梁段施工标高进行动态调整,经过合龙段浇筑及剩余预应力钢束张拉,主梁施工完毕,主梁1#至50#测点线性控制结果如图2及图3所示.图2 梁底1#至50#截面设计高程与实测高程对比图3 梁底1#至50#截面设计高程与实测高程差值分析图2可以看出连续梁梁底1#至50#测点实测高程测试结果与设计值基本相近,主梁线形无较大突变.从图3可以看出,成桥后实测值与设计值直接误差在8 mm以内,桥梁施工满足设计要求,满足误差要求.4 结论(1)分别在初次建模及残差修正两个过程利用自动寻优定权法和最小二乘法对残差修正GM(1,1)模型的权重系数及初始条件进行优化,对传统残差修正GM (1,1)模型的预测效果有提高作用.(2)采用优化后的残差修正GM(1,1)模型对大跨度连续梁桥的轴线线形进行施工控制,通过已浇筑梁段的竖向挠度值建立模型,预测尚未浇筑梁段竖向挠度变形值,以此来动态调整未浇筑梁段立模标高值从而可以有效控制桥梁轴线线形,成桥以后各测点设计值与实测值标高之差均在8 mm以内,符合误差要求.(3)灰色控制理论在施工梁段数较少时便可建立起灰色模型,对施工中不确定因素引起的误差进行修正,且预测精度有一定保证,因此在大跨度悬臂施工桥梁线性控制中极为适用.参考文献:【相关文献】[1]包龙生,宋涛,于玲,等.基于Kalman滤波法与正装分析法对桥梁施工控制研究[J].沈阳建筑大学学报(自然科学版),2015,31(4):653-660.[2]于涛.BP神经网络在大型斜拉桥施工控制中的应用研究[D].南京:河海大学,2007.[3]邓聚龙.灰色系统综述[J].世界科学,1983(7):1-5.[4]刘思峰.灰色系统理论的产生与发展[J].南京航空航天大学学报,2004(2):267-272.[5]姚荣.桥梁施工监控技术中的灰色系统预测模型对比分析[J].中外公路,2011,31(5):160-163.[6]刘寒冰,向一鸣,阮有兴.背景值优化的多变量灰色模型在路基沉降预测中的应用[J].岩土力学,2013,34(1):173-181.[7]王强,刘松玉,童立元,等.灰色理论在深基坑支挡结构变形预测中应用[J].岩土工程学报,2010,32(S2):69-72.[8]樊新海,苗卿敏,王华民.灰色预测GM(1,1)模型及其改进与应用[J].装甲兵工程学院学报,2003(2):24-26.[9]张大海,江世芳,史开泉.灰色预测公式的理论缺陷及改进[J].系统工程理论与实践,2002(8):140-142.[10]杨华龙,刘金霞,郑斌.灰色预测GM(1,1)模型的改进及应用[J].数学的实践与认识,2011,41(23):39-46.[11]边培松,王登杰,于少华.新陈代谢GM(1,1)模型在建筑物沉降预测中的应用[J].山东大学学报(工学版),2010,40(3):119-123.。