大学生电子设计竞赛2017题目集合
- 格式:pdf
- 大小:1.78 MB
- 文档页数:25
附件2比赛题目及评分标准【题目一】Xilinx哈夫曼编码1.设计要求要求对一段数据序列进行哈夫曼编码,使得平均码长最短,输出各元素编码和编码后的数据序列。
(1)组成序列的元素是[0-9]这10个数字,每个数字其对应的4位二进制数表示。
比如5对应0101,9对应1001。
(2)输入数据序列的长度为256。
(3)先输出每个元素的编码,然后输出数据序列对应的哈夫曼编码序列。
2.电路接口RTL级代码顶层模块名统一为HuffmanCoding,可参考电路接口与时序如下:(可以根据自身设计需求,对电路接口进行修改) module HuffmanCoding(input wire clk,input wire rst_n,input wire [3:0] data_in,input wire start,output wire output_data,output wire output_start,output wire output_done);1clk rst_nstartoutput_done(1)复位之后,当start信号高有效后开始连续输入256个数据序列,data_in数据宽度为4,输入需要256个时钟周期。
(2)经过运算后,output_start信号高有效后,开始输出结果output_data。
output_data信号数据宽度是1,因此输出是二进制序列。
最后output_done 高有效说明整个编码过程结束。
(3)output_data数据包含2个部分。
先输出[0-9]这10个数字的哈夫曼编码(具体的输出格式可以自行设定),然后输出数据序列哈夫曼编码后的序列。
评分标准:1. TestBench建议先用C/C++或者Matlab等高级语言实现上述哈夫曼编码设计需求,并以此为基准,作为电路仿真的TestBench。
2. 电路功能电路功能的完成情况,包括是否满足设计要求、源代码、仿真程序和文档说明等。
2017年全国大学生电子设计竞赛2017年第十三届全国大学生电子设计竞赛2017年全国大学生电子设计竞赛滚球控制系统(B题)2017年第十三届全国大学生电子设计竞赛2017年8月12日摘要这是一个以小球为载体,用K60单片机控制小球在平板上实现静止或者按照预定轨迹移动的系统。
本系统包括电源模块、传感器模块、驱动模块、电机模块等。
在此滚球系统中,利用摄像头检测小球的位置、MPU6050传感器反馈平板的倾斜程度给单片机,应用PWM调速方法作为动力源、PID为主要控制方法,控制舵机的切换及转速,从而控制平板不断调整位置以使小球按期望要求动作。
关键词: K60单片机、摄像头、MPU6050、舵机2017年第十三届全国大学生电子设计竞赛Abstract:This is a ball carrier, K60 chip is used to control the ball in the stationary or moving plate according to a predetermined trajectory of the system. This system includes power module, sensor module, driver module, motor module. This ball system, the use of cameras to detect the location of the ball, MPU6050 flat degree of tilt sensor feedback to the microcontroller the application of PWM as the main control method, control method, switching and speed control of the rudder, continue to control panel to adjust the position to make the ball move according to the desired requirements.Keywords: K60 microcontroller, camera, MPU6050, servo目录摘要 (3)目录 (4)1方案比较与论证 (5)1.1方案设计 (5)1.2方案论证 (6)1.2.1单片机模块的选择 (6)2017年第十三届全国大学生电子设计竞赛1.2.2电机模块的选择 (6)1.3总体总结 (7)2 硬件设计 (7)2.1 理论分析与计算 (7)2.2 总体硬件框图 (9)2.3单元电路设计 (10)3 软件设计 (10)3.1总体软件框图 (10)3.2 小球的检测及处理 (11)3.3 控制方法:PID算法 (11)3.3.1 PID的基本含义 (11)3.4程序目录 (12)4 系统调试与测试 (12)4.1 硬件测试 (12)4.2软件调试 (13)4.3 软硬件联合调试 (13)4.3.1测试结果 (13)4.3.2测试分析与结论 (14)5 设计总结 (14)参考文献 (15)附录 (15)1方案比较与论证1.1方案设计根据题目的要求和组内讨论,我们的滚球控制装置采用飞思卡尔智能车系统中的K60单片机,利用摄像头检测小球的位置,通过自己设计的驱动板进行驱动,只要单片机给出相应的控制信号,便可控制舵机工作。
17电赛控制题目
以下是一个17电赛控制题目的例子:
设计一个控制系统,使一个无人车在一个迷宫中尽快找到出口。
迷宫是一个n x m的矩阵,其中连通的路径用0表示,墙壁用
1表示。
无人车可以向上、下、左、右四个方向移动,但不能
穿过墙壁。
控制系统需要实时控制无人车的移动方向,直到找到出口为止。
要求:
1. 无人车在每个时间步只能移动一格。
2. 控制系统应该尽量减少无人车的移动步数,以降低能耗。
3. 控制系统必须考虑到随时发生的墙壁破损,即在任意时间步任意位置的墙壁可能会变成连通的路径,反之亦然。
请设计一个算法或程序,解决上述问题,并回答下面的问题:
1. 你的算法或程序的时间复杂度是多少?
2. 如何处理墙壁破损的情况?
3. 有没有可能无法找到出口?若有可能,请解释原因。
注意:
1. 回答问题时,请给出详细的解释和理由。
2. 以上问题只是一个例子,实际的17电赛控制题目可能涉及
更复杂的要求和限制。
请根据实际题目进行解答。
全国大学生电子设计竞赛题2017年全国大学生电子设计竞赛远程幅频特性测试仪(H题)2017年08月12日摘要本幅频特性测试装置采用STM32F407为主控芯片,通过集成DDS芯片AD9959作为信号源,实现了幅度和频率的动态可调;通过级联两块AD8367作为放大器,实现了增益0-40dB连续可调,具有较好的噪声抑制效果;通过AD8310对数检波模块,实现了不同频率信号幅度的测量,并且能够定性的绘制出幅频特性曲线.关键词:幅频特性测试装置;DDS;VGA;低噪;对数检波AbstractThe amplitude frequency characteristic test device uses STM32F407 as the main control chip, through the integrated DDS chip AD9959 as the signal source, to achieve the amplitude and frequency of the dynamic adjustable; through the cascade of two AD8367 as an amplifier, to achieve a gain of 0-40dB continuously adjustable , With good noise suppression effect; through the AD8310 logarithmic detection module, to achieve a different frequency signal amplitude measurement, and can qualitatively draw the amplitude and frequency characteristics of the curve. Keyword: amplitude frequency characteristic test device;DDS;VGA;low noise;logarithmic detection目录一.方案论证.................................................................................................................. 1.1方案比较与选择.......................................................................................... 1.2方案描述......................................................................................................二.理论分析与计算........................................................................................2.1DDS模块..................................................................................................... 2.2放大器模块.................................................................................................. 2.3幅值测量模块..............................................................................................2. 4 π型衰减网络三.电路与程序设计........................................................................................3.1电路设计...................................................................................................... 3.2程序设计........................................................................................................四.测试方案与测试结果 ............................................................................... 五.结论............................................................................................................................远程幅频特性测试装置(H题)一.系统方案1.方案比较与选择1)信号源模块:方案一:采用直接数字频率合成(DDS)方案。
2017年全国大学生电子设计竞赛试题参赛注意事项(1)8月9日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月12日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
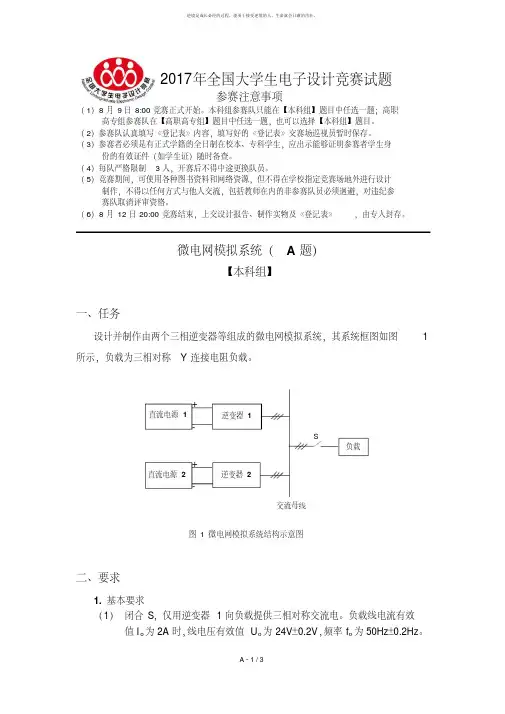
微电网模拟系统(A题)【本科组】一、任务设计并制作由两个三相逆变器等组成的微电网模拟系统,其系统框图如图1所示,负载为三相对称Y连接电阻负载。
交流母线图1 微电网模拟系统结构示意图二、要求1. 基本要求(1)闭合S,仅用逆变器1向负载提供三相对称交流电。
负载线电流有效值I o为2A时,线电压有效值U o为24V±0.2V,频率f o为50Hz±0.2Hz。
A - 1 / 3(2)在基本要求(1)的工作条件下,交流母线电压总谐波畸变率(THD)不大于3%。
(3)在基本要求(1)的工作条件下,逆变器1的效率ƞ不低于87%。
(4)逆变器1给负载供电,负载线电流有效值I o在0~2A间变化时,负载调整率S I1≤0.3%。
2. 发挥部分(1)逆变器1和逆变器2能共同向负载输出功率,使负载线电流有效值I o 达到3A,频率f o为50Hz±0.2Hz。
(2)负载线电流有效值I o在1~3A间变化时,逆变器1和逆变器2输出功率保持为1:1分配,两个逆变器输出线电流的差值绝对值不大于0.1A。
负载调整率S I2≤0.3%。
2017年全国大学生电子设计竞赛————————————————————————————————作者:————————————————————————————————日期:2017年全国大学生电子设计竞赛管道内钢珠运动测量装置(M题)【高职高专】摘要:系统以STC15W4K61S4单片机为主控器,设计一款管道内钢珠运动测量装置。
该装置可以获取管道内钢珠滚动的方向,以及倒入管道内钢珠的个数和管道的倾斜角度。
并通过LCD12864液晶显示屏实时显示钢珠滚动方向、个数以及管道的倾斜角度。
系统包括单片机主控模块、角度信号采集模块、磁力传感器模块、显示模块、电源模块、采用稳压输出电源为系统提供工作电源。
系统制作成本较低、工作性能稳定,能很好达到设计要求。
关键词:角度传感器、磁性接近开关、LCD12864目录1设计任务与要求 (1)1.1设计任务 (1)1.2技术指标 (1)1.3题目评析 (1)2方案比较与选择 (2)2.1单片机选择 (2)2.2角度测量选择 (2)2.3 钢珠运动检测选择 (2)2.4显示选择 (2)2.5电源选择 (2)3电路系统与程序结构设计 (3)3.1系统硬件总体设计 (3)3.2单片机最小系统模块设计 (3)3.3角度传感器模块设计 (3)3.4 磁性传感器模块设计 (3)3.5显示模块设计 (4)3.6电源模块设计 (4)3.7程序结构与设计 (4)4系统测试 (5)5总结 (6)参考文献及附录 (6)1设计任务与要求1.1设计任务设计并制作一个管道内钢珠运动测量装置,钢珠运动部分的结构如图1.1所示。
1.2技术指标1.基本要求规定传感器宽度w≤20mm,传感器1和2之间的距离l任意选择。
(1)按照图1.1所示放置管道,由A端放入2~10粒钢珠,每粒钢珠放入的时间间隔≤2s,要求装置能够显示放入钢珠的个数。
(2)分别将管道放置为A端高于B端或B端高于A端,从高端放入1粒钢珠,要求能够显示钢珠的运动方向。
2017年全国电赛L题和P题简析武汉大学赵茂泰2017.10. 30L题:自动泊车系统1.题意2.电动小车的驱动方式3.自动泊车的方案及分析4.计费及自动碰撞检测5.计时及计费1.题意◆自动泊车系统:不用人工干预,自动停车入位的系统。
◆自动泊车系统目前有两种形式:1,高档轿车所具有的自动泊车功能。
目前国内宝马、奔驰、大众等车型都配备有这种功能。
泊车时,驾驶员只要按下自动泊车的按钮,车头两侧的雷达就会自动扫描周边,一旦发现合适的空位,就自动进入停车位。
2,基于智能车库的自动泊车系统。
泊车时,驾驶员只需要把车停在车库指定地点并进行简单操作,就可以离开。
汽车将在智能化车库的配合下,自动在车库中找到合适的停车位。
本题定义的自动泊车系统是一种需要智能化车库配合的,简易自动泊车系统。
二、要求(简化)(1)停车场中的控制装置能通过键盘设定一个空车位,同时点亮对应空车位的LED灯。
(2)控制装置设定为某一个空车位;电动小车能自动驶入指定停车位;驶入停车位后停车5s,停车期间发出声光信息;然后再从停车位驶出停车场。
要求泊车时间(指一进一出时间及停车时间)越短越好;泊车过程中碰撞隔板的次数越少越好。
(3)电动小车具有检测并实时显示在泊车过程中碰撞隔板次数的功能,要求电动小车周边任何位置碰撞隔板都能检测到。
(4)停车场控制装置具有自动计时计费功能,实时显示计费时间和停车费。
计费按每30秒5元计算(未满30秒按5元收费)。
学生作品采用了以下几种驱动方式:●后轮单驱方式●四轮四驱方式●采用麦冷的四轮四驱方式●其他方式(略)后轮单驱方式(视频)后轮单驱方式驱动方式与多数实际汽车的驱动方式是相同的。
单驱方式的汽车转弯半径大,自动泊车时间长,泊车过程的控制比较复杂。
只有10-20% 的参赛队采用该方式。
四轮四驱方式四轮四驱方式能分别控制每一个车轮的转动,姿态控制灵活,大幅度缩小了小车转弯的半径。
约有80%的参赛队都采用了这种驱动方式。
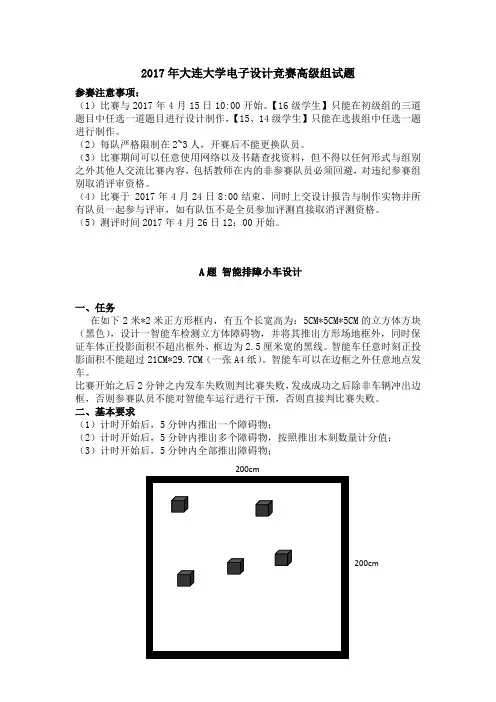
2017年大连大学电子设计竞赛高级组试题参赛注意事项:(1)比赛与2017年4月15日10:00开始。
【16级学生】只能在初级组的三道题目中任选一道题目进行设计制作,【15、14级学生】只能在选拔组中任选一题进行制作。
(2)每队严格限制在2~3人,开赛后不能更换队员。
(3)比赛期间可以任意使用网络以及书籍查找资料,但不得以任何形式与组别之外其他人交流比赛内容,包括教师在内的非参赛队员必须回避,对违纪参赛组别取消评审资格。
(4)比赛于 2017年4月24日8:00结束,同时上交设计报告与制作实物并所有队员一起参与评审,如有队伍不是全员参加评测直接取消评测资格。
(5)测评时间2017年4月26日12:00开始。
A题智能排障小车设计一、任务在如下2米*2米正方形框内,有五个长宽高为:5CM*5CM*5CM的立方体方块(黑色),设计一智能车检测立方体障碍物,并将其推出方形场地框外,同时保证车体正投影面积不超出框外,框边为2.5厘米宽的黑线。
智能车任意时刻正投影面积不能超过21CM*29.7CM(一张A4纸)。
智能车可以在边框之外任意地点发车。
比赛开始之后2分钟之内发车失败则判比赛失败,发成成功之后除非车辆冲出边框,否则参赛队员不能对智能车运行进行干预,否则直接判比赛失败。
二、基本要求(1)计时开始后,5分钟内推出一个障碍物;(2)计时开始后,5分钟内推出多个障碍物,按照推出木刻数量计分值;(3)计时开始后,5分钟内全部推出障碍物;200cm三、扩展功能(1)推出障碍物的同时给出推出的数量指示。
(2)推出障碍物的同时给出时间指示。
(3)能分别显示出推出单个障碍物所有时间和所有障碍的总时间。
B 题 超声测距无线监测装置一、任务设计一个超声测距装置,可要求测量范围在0.1-4米之间,测量时与被测物体无直接接触,能够将测量结果发送至远程另一台控制器,并清晰显示播报测量结果。
被测物体面积大于100CM 2的平面即可。
2017年全国大学生电子设计竞赛综合测评题综合测评注意事项(1)综合测评于2017年8月21日8:00正式开始,8月21日15:00结束。
(2)本科组和高职高专组优秀参赛队共用此题。
(3)综合测评以队为单位采用全封闭方式进行,现场不能上网、不能使用手机。
(4)综合测评结束时,制作的实物及《综合测评测试记录表》,由全国专家组委派的专家封存,交赛区保管。
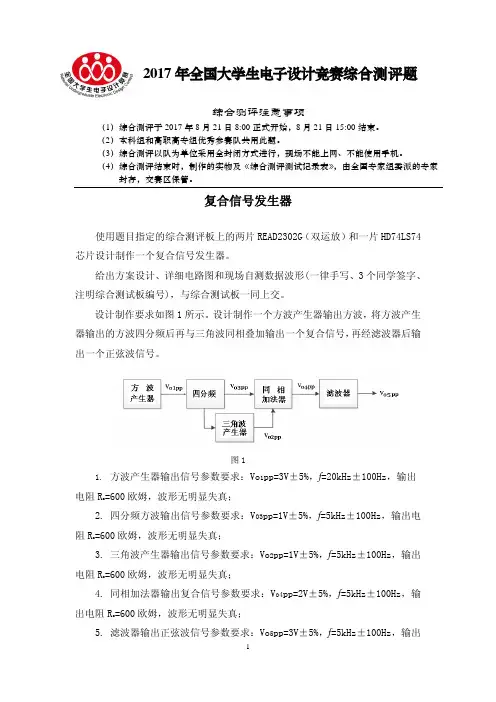
复合信号发生器使用题目指定的综合测评板上的两片READ2302G(双运放)和一片HD74LS74芯片设计制作一个复合信号发生器。
给出方案设计、详细电路图和现场自测数据波形(一律手写、3个同学签字、注明综合测试板编号),与综合测试板一同上交。
设计制作要求如图1所示。
设计制作一个方波产生器输出方波,将方波产生器输出的方波四分频后再与三角波同相叠加输出一个复合信号,再经滤波器后输出一个正弦波信号。
图11.方波产生器输出信号参数要求:Vo1pp=3V±5%,f=20kHz±100Hz,输出=600欧姆,波形无明显失真;电阻Ro2. 四分频方波输出信号参数要求:V03pp=1V±5%,f=5kHz±100Hz,输出电阻R=600欧姆,波形无明显失真;o3. 三角波产生器输出信号参数要求:Vo2pp=1V±5%,f=5kHz±100Hz,输出电阻R=600欧姆,波形无明显失真;o4. 同相加法器输出复合信号参数要求:V o4pp=2V±5%,f=5kHz±100Hz,输出电阻R=600欧姆,波形无明显失真;o5. 滤波器输出正弦波信号参数要求:Vo5pp=3V±5%,f=5kHz±100Hz,输出电阻R=600欧姆,波形无明显失真;o6. 每个模块的输出的负载电阻为600欧姆,应标示清楚、置于明显位置,便于检查。
7. 给出方案设计、详细电路图和现场自测数据波形(一律手写、3个同学签字、注明综合测试板编号),与综合测试板一同上交。
2017年全国电赛题目2017年全国电赛题目分为两部分,理论和实践。
下面将分别介绍。
一、理论部分1.请简述数字信号处理的基本原理和主要应用领域。
并结合一个具体示例,详细说明数字信号处理在该领域中的作用及其优势。
答:数字信号处理是指对连续时间信号进行数字化采样,通过数学处理方法对这些数字序列进行运算和分析的过程。
数字信号处理主要包括信号采样、量化、编码、处理和重构等环节。
数字信号处理的应用领域非常广泛,包括通信、雷达、生物医学、图像处理等。
以图像处理为例,我们使用数字相机拍摄的照片就是一种离散的数字信号。
通过数字信号处理技术,我们可以对这些数字图像进行降噪、增强、滤波等操作,达到改善图像质量的目的。
而传统的模拟图像处理技术则无法对数字图像进行高效、精确的处理。
数字信号处理在图像处理中的优势主要有以下几点。
首先,数字信号处理可以充分利用计算机和数字电子器件的高计算性能和低成本,实现复杂的算法和功能。
其次,数字信号处理利用数学方法对信号进行精确的分析和处理,具有较高的准确性和稳定性。
最后,数字信号处理技术易于集成和扩展,可以方便地与其他软硬件系统进行接口,实现功能的无缝衔接。
2.现实中经常出现声音同时具有高频和低频成分的情况。
请解释声音合成技术中的加性合成和减性合成,并比较它们的优缺点。
答:声音合成是指通过数字信号处理技术通过某种途径合成一段声音信号的过程。
在声音合成技术中,加性合成和减性合成是两种常见的方法。
加性合成是指将不同频率的声波叠加在一起,形成复杂的声音。
这种方法通过相位和振幅的调控,将多个简单的音调组合形成复杂的声音信号。
加性合成的优点是可以灵活地调整和组合不同的频率分量,以形成丰富多样的声音。
但是,加性合成的缺点是合成过程较为复杂,需要混合和叠加多种频率的声波,计算和处理的复杂度较高。
减性合成是指从复杂声音信号中分离出特定频率成分的过程。
通过滤波和频域分析等技术,可以将声音信号中的特定频率成分提取出来,从而达到减小复杂声音的目的。
附件2比赛题目及评分标准【题目一】Xilinx哈夫曼编码1.设计要求要求对一段数据序列进行哈夫曼编码,使得平均码长最短,输出各元素编码和编码后的数据序列。
(1)组成序列的元素是[0-9]这10个数字,每个数字其对应的4位二进制数表示。
比如5对应0101,9对应1001。
(2)输入数据序列的长度为256。
(3)先输出每个元素的编码,然后输出数据序列对应的哈夫曼编码序列。
2.电路接口RTL级代码顶层模块名统一为HuffmanCoding,可参考电路接口与时序如下:(可以根据自身设计需求,对电路接口进行修改) module HuffmanCoding(input wire clk,input wire rst_n,input wire [3:0] data_in,input wire start,output wire output_data,output wire output_start,output wire output_done);1clk rst_nstartoutput_done(1)复位之后,当start信号高有效后开始连续输入256个数据序列,data_in数据宽度为4,输入需要256个时钟周期。
(2)经过运算后,output_start信号高有效后,开始输出结果output_data。
output_data信号数据宽度是1,因此输出是二进制序列。
最后output_done 高有效说明整个编码过程结束。
(3)output_data数据包含2个部分。
先输出[0-9]这10个数字的哈夫曼编码(具体的输出格式可以自行设定),然后输出数据序列哈夫曼编码后的序列。
评分标准:1. TestBench建议先用C/C++或者Matlab等高级语言实现上述哈夫曼编码设计需求,并以此为基准,作为电路仿真的TestBench。
2. 电路功能电路功能的完成情况,包括是否满足设计要求、源代码、仿真程序和文档说明等。
2017年浙江理工大学大学生电子设计竞赛试题参赛注意事项(1)5月 5日 8:00 竞赛正式开始。
本题只能大二参赛对选择;(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制 3 人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)5月15日18:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
简易数字信号传输性能分析仪(E 题)一、任务设计一个简易数字信号传输性能分析仪,实现数字信号传输性能测试;同时,设计三个低通滤波器和一个伪随机信号发生器用来模拟传输信道。
简易数字信号传输性能分析仪的框图如图 1 所示。
图中,V1 和V1-clock 是数字信号发生器产生的数字信号和相应的时钟信号;V2 是经过滤波器滤波后的输出信号;V3 是伪随机信号发生器产生的伪随机信号;V2a 是V2 信号与经过电容C的V3 信号之和,作为数字信号分析电路的输入信号;V4 和V4-syn 是数字信号分析电路输出的信号和提取的同步信号。
图 1 简易数字信号传输性能分析仪框图二、要求1.基本要求(1)设计并制作一个数字信号发生器:a)数字信号V1 为f1(x) =1+ x2+ x3+ x4+ x8的m 序列,其时钟信号为V1-clock;b)数据率为10~100kbps,按10kbps 步进可调。
数据率误差绝对值不大于1%;c)输出信号为TTL 电平。
(2)设计三个低通滤波器,用来模拟传输信道的幅频特性:a)每个滤波器带外衰减不少于40dB/十倍频程;b)三个滤波器的截止频率分别为100kHz、200kHz、500kHz,截止频率误差绝对值不大于10%;c)滤波器的通带增益A F 在0.2~4.0 范围内可调。
2017年电子设计大赛全国大学生电子设计大赛既丰富了学生的专业知识开拓了视野、又提高了学生独立思考和动手动脑能力。
下面店铺为大家整理了2017年电子设计大赛,希望大家喜欢。
电子设计竞赛题目及要求1、竞赛题目分为本科生组题目和高职高专学生组题目。
2、竞赛题目包括“理论设计”和“实际制作”两部分,以电子电路(含模拟和数字电路)设计应用为基础,可以涉及模-数混合电路、单片机、嵌入式系统、DSP、可编程器件、EDA软件的应用。
参赛队的个人计算机、移动式存储介质、开发装置或仿真器等不得带入测试现场(实际制作实物中凡需软件编程的芯片必须事先下载脱机工作)。
3、竞赛题目应具有实际意义和应用背景,并考虑到目前教学的基本内容和新技术的应用趋势,对教学内容和课程体系改革和学生今后工作起到一定的引导作用。
4、竞赛题目着重考核参赛学生综合运用基础知识进行理论设计的能力、实践创新和独立工作的基本能力、实验综合技能(制作与调试),并鼓励参赛学生发扬团队协作的人文精神。
5、竞赛题目在难易程度上,既要考虑使参赛学生能在规定时间内完成基本要求,又能使优秀学生有充分发挥与创新的余地。
6、全国大学生电子设计竞赛仍采用广泛征题、全国统一命题的方式。
请各赛区广泛发动本赛区高校师生、有关企业,组织好今年竞赛的征题工作,按照《20xx年全国大学生电子设计竞赛命题原则及征题要求》(附件1),将征题汇总后于xx月xx日(星期日)前报全国竞赛组委会秘书处。
电子设计竞赛时间与形式1、报名时间:20xx年xx月xx日截止。
各赛区负责本赛区的报名与情况汇总工作,并填写电子版的全国统一格式的《20xx年全国大学生电子设计竞赛赛区报名汇总表》,该表格电子版从全国竞赛组委会网站下载。
2、竞赛时间:20xx年全国大学生电子设计竞赛时间为xx月xx 日(星期三)8:00至xx日(星期六)20:00。
竞赛以赛区为单位统一组织报名、竞赛、评审和评奖工作,具体时间节点及相关竞赛工作进度安排请按照《20xx年全国大学生电子设计竞赛进度安排》(查看)进行。
A - 1 / 3
2017年全国大学生电子设计竞赛试题
参赛注意事项
(1)8月9日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职
高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身
份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计
制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月12日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
微电网模拟系统(A 题)
【本科组】
一、任务
设计并制作由两个三相逆变器等组成的微电网模拟系统,其系统框图如图1所示,负载为三相对称Y 连接电阻负载。
图1 微电网模拟系统结构示意图
二、要求
1. 基本要求
(1) 闭合S ,仅用逆变器1向负载提供三相对称交流电。
负载线电流有效
值I o 为2A 时,线电压有效值U o 为24V±0.2V ,频率f o 为50Hz±0.2Hz 。
交流母线
(2)在基本要求(1)的工作条件下,交流母线电压总谐波畸变率(THD)不大于3%。
(3)在基本要求(1)的工作条件下,逆变器1的效率ƞ不低于87%。
(4)逆变器1给负载供电,负载线电流有效值I o在0~2A间变化时,负载调整率S I1≤0.3%。
2. 发挥部分
(1)逆变器1和逆变器2能共同向负载输出功率,使负载线电流有效值I o 达到3A,频率f o为50Hz±0.2Hz。
(2)负载线电流有效值I o在1~3A间变化时,逆变器1和逆变器2输出功率保持为1:1分配,两个逆变器输出线电流的差值绝对值不大于0.1A。
负载调整率S I2≤0.3%。
(3)负载线电流有效值I o在1~3A间变化时,逆变器1和逆变器2输出功率可按设定在指定范围(比值K为1:2~2:1)内自动分配,两个逆变
器输出线电流折算值的差值绝对值不大于0.1A。
(4)其他。
三、说明
(1)本题涉及的微电网系统未考虑并网功能,负荷为电阻性负载,微电网中风力发电、太阳能发电、储能等由直流电源等效。
(2)题目中提及的电流、电压值均为三相线电流、线电压有效值。
(3)制作时须考虑测试方便,合理设置测试点,测试过程中不需重新接线。
(4)为方便测试,可使用功率分析仪等测试逆变器的效率、THD等。
(5)进行基本要求测试时,微电网模拟系统仅由直流电源1供电;进行发挥部分测试时,微电网模拟系统仅由直流电源1和直流电源2供电。
|,其中U o1为I o=0A时的输出(6)本题定义:(1)负载调整率S I1=|U o2−U o1
U o1
端线电压,U o2为I o=2A时的输出端线电压;(2)负载调整率
|,其中U o1为I o=1A时的输出端线电压,U o2为I o =3A时S I2=|U o2−U o1
U o1
的输出端线电压;(3)逆变器1的效率ƞ为逆变器1输出功率除以直
流电源1的输出功率。
(7)发挥部分(3)中的线电流折算值定义:功率比值K>1时,其中电流值小者乘以K,电流值大者不变;功率比值K<1时,其中电流值小者
除以K,电流值大者不变。
(8)本题的直流电源1和直流电源2自备。
A - 2 / 3
四、评分标准
A - 3 / 3
B - 1 / 3
2017年全国大学生电子设计竞赛试题
参赛注意事项
(1)8月9日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生
身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设
计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
【本科组】 一、任务
在边长为65cm 光滑的正方形平板上均匀分布着9个外径3cm 的圆形区域,其编号分别为1~9号,位置如图1所示。
设计一控制系统,通过控制平板的倾斜,使直径不大于2.5cm 的小球能够按照指定的要求在平板上完成各种动作,并从动作开始计时并显示,单位为秒。
二、要求
1.基本部分 图1 平板位置分布示意图 (1) 将小球放置在区域2,控制使小球在区域内停留不少于5秒。
(2) 在15秒内,控制小球从区域1进入区域5,在区域5停留不少于2秒。
(3) 控制小球从区域1进入区域4,在区域4停留不少于2秒;然后再进入区域5,
小球在区域5停留不少于2秒。
完成以上两个动作总时间不超过20秒。
(4) 在30秒内,控制小球从区域1进入区域9,且在区域9停留不少于2秒。
2.发挥部分
(1) 在40秒内,控制小球从区域1出发,先后进入区域2、区域6,停止于区域
9,在区域9中停留时间不少于2秒。
(2) 在40秒内,控制小球从区域A 出发、先后进入区域B 、区域C ,停止于区
域D ;测试现场用键盘依次设置区域编号A 、B 、C 、D ,控制小球完成动作。
(3) 小球从区域4出发,作环绕区域5的运动
(不进入),运动不少于3周后停止
于区域9,且保持不少于2秒。
(4) 其他。