电流调节器设计
- 格式:pdf
- 大小:461.30 KB
- 文档页数:11
《运动控制系统设计》课程设计报告设计题目:转速、电流双闭环直流调速系统设计与实践班级:04 级自动化一班学号:姓名:指导教师:设计时间:2007.11.20 —2007.12.14目录摘要第一章概述第二章设计任务及要求2.1设计任务:2.2设计要求:2.3理论设计3.1方案论证3.2系统设计3.2.1电流调节器设计3.2.1.1确定时间常数3.2.1.2 选择电流调节器结构3.2.1.3计算电流调节器参数3.2.1.4 校验近似条件3.2.1.5 计算调节器电阻和电容3.2.2速度调节器设计3.2.2.1 确定时间常数3.2.2.2 选择转速调节器结构3.2.2.3 计算转速调节器参数3.2.2.4 校验近似条件3.2.2.5 计算调节器电阻和电容3.2.2.6 校核转速超调量第三章系统建模及仿真实验4.1MATLAB 仿真软件介绍4.2仿真建模及实验4.2.1单闭环仿真实验4.2.2双闭环仿真实验4.2.3仿真波形分析第四章实际系统设计及实验5.1 系统组成及工作原理5.2 设备及仪器5.3 实验过程5.3.1 实验内容5.3.2 实验步骤第五章总结与体会参考文献摘要从七十年代开始,由于晶闸管直流调速系统的高效、无噪音和快速响应等优点而得到广泛应用。
双闭环直流调速系统就是一个典型的系统,该系统一般含晶闸管可控整流主电路、移相控制电路、转速电流双闭环调速控制电路、以及缺相和过流保护电路等.给定信号为0~10V直流信号,可对主电路输出电压进行平滑调节。
由于其机械特性硬,调速范围宽,而且是无级调速,所以可对直流电动机进行调压调速。
动静态性能好,抗扰性能佳。
速度调节及抗负载和电网扰动,采用双PI调节器,可获得良好的动静态效果。
电流环校正成典型I型系统。
为使系统在阶跃扰动时无稳态误差,并具有较好的抗扰性能,速度环设计成典型Ⅱ型系统。
根据转速、电流双闭环调速系统的设计方法,用Simulink做了带电流补偿的电压负反馈直流调速系统进行仿真综合调试,分析系统的动态性能,并进行校正,得出正确的仿真波形图。
1 设计方案论证电流环调节器方案一,采用PID调节器,PID调节器是最理想的调节器,能够平滑快速调速,但在实际应用过程中存在微分冲击,将对电机产生较大的冲击作用,一般要小心使用。
方案二,采用PI调节器,PI调节器能够做到无静差调节,且电路较PID调节器简单,故采用方案二。
转速环调节器方案一,采用PID调节器,PID调节器是最理想的调节器,能够平滑快速调速,但在实际应用过程中存在微分冲击,将对电机产生较大的冲击作用,一般要小心使用。
方案二,采用PI调节器,PI调节器能够做到无静差调节,且电路较PID调节器简单,故采用方案二。
2双闭环调速控制系统电路设计及其原理综述随着现代工业的开展,在调速领域中,双闭环控制的理念已经得到了越来越广泛的认同与应用。
相对于单闭环系统中不能随心所欲地控制电流和转矩的动态过程的弱点。
双闭环控制那么很好的弥补了他的这一缺陷。
双闭环控制可实现转速和电流两种负反应的分别作用,从而获得良好的静,动态性能。
其良好的动态性能主要表达在其抗负载扰动以及抗电网电压扰动之上。
正由于双闭环调速的众多优点,所以在此有必要对其最优化设计进展深入的探讨和研究。
本次课程设计目的就是旨在对双闭环进展最优化的设计。
整流电路本次课程设计的整流主电路采用的是三相桥式全控整流电路,它可看成是由一组共阴接法和另一组共阳接法的三相半波可控整流电路串联而成。
共阴极组VT1、VT3和VT5在正半周导电,流经变压器的电流为正向电流;共阳极组VT2、VT4和VT6在负半周导电,流经变压器的电流为反向电流。
变压器每相绕组在正负半周都有电流流过,因此,变压器绕组中没有直流磁通势,同时也提高了变压器绕组的利用率。
三相桥式全控整流电路多用于直流电动机或要求实现有源逆变的负载。
为使负载电流连续平滑,有利于直流电动机换向及减小火花,以改善电动机的机械特性,一般要串入电感量足够大的平波电抗器,这就等同于含有反电动势的大电感负载。
三相桥式全控整流电路的工作原理是当a=0°时的工作情况。

永磁同步电机vf控制方法
一、电压调节器设计
电压调节器是永磁同步电机(PMSM)VF控制方法中的重要组成部分,其主要作用是调节输入到电机的电压,以实现电机的稳定运行。
电压调节器通常采用PI(比例-积分)控制器,通过调整比例和积分系数来调整电压调节器的输出。
在PMSM的VF控制中,电压调节器的设计主要关注的是调节精度和动态响应速度。
二、电流调节器设计
电流调节器是用于控制PMSM的电流,以实现电流的稳定和控制。
电流调节器通常也采用PI控制器,通过调整比例和积分系数来调整电流调节器的输出。
在PMSM的VF控制中,电流调节器的设计主要关注的是调节精度和抗干扰能力。
三、磁通量控制
磁通量控制是PMSM的VF控制中的重要环节。
磁通量的大小直接影响到电机的性能,因此需要对磁通量进行精确控制。
在VF控制中,通常采用磁场定向控制(FOC)的方法,通过调节电压和电流来控制磁通量的大小和方向。
四、转矩控制
转矩控制是PMSM的VF控制中的另一个重要环节。
转矩的大小直接影响到电机的输出能力,因此需要对转矩进行精确控制。
在VF控制中,通常采用转矩闭环控制的方法,通过调节电压和电流来控制电机的转矩。
五、转速控制
转速控制是PMSM的VF控制中的重要组成部分。
转速的大小直接影响到电机的运行状态,因此需要对转速进行精确控制。
在VF控制中,通常采用转速闭环控制的方法,通过调节电压和电流来控制电机的转速。
转速控制的精度和动态响应速度是转速控制器设计的关键因素。
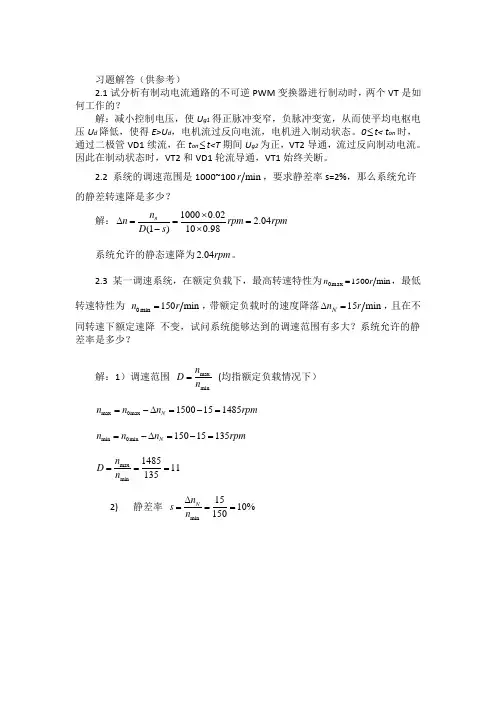
习题解答(供参考)2.1试分析有制动电流通路的不可逆PWM 变换器进行制动时,两个VT 是如何工作的?解:减小控制电压,使U g1得正脉冲变窄,负脉冲变宽,从而使平均电枢电压U d 降低,使得E>U d ,电机流过反向电流,电机进入制动状态。
0≤t< t on 时,通过二极管VD1续流,在t on ≤t<T 期间U g2为正,VT2导通,流过反向制动电流。
因此在制动状态时,VT2和VD1轮流导通,VT1始终关断。
2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少?解:10000.022.04(1)100.98n n n rpm rpm D s ⨯∆===-⨯系统允许的静态速降为2.04rpm 。
2.3 某一调速系统,在额定负载下,最高转速特性为min 1500max 0r n =,最低转速特性为 0min 150min n r =,带额定负载时的速度降落15min N n r ∆=,且在不同转速下额定速降 不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少?解:1)调速范围 maxminn D n =(均指额定负载情况下) max 0max 1500151485N n n n rpm =-∆=-=min 0min 15015135N n n n rpm=-∆=-=max min 148511135n D n ===2) 静差率 min 1510%150N n s n ∆===2.4 直流电动机为N P =74kW, N U =220V ,N I =378A ,N n =1430r/min ,Ra=0.023Ω。
相控整流器内阻Rrec=0.022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
如果s=30%时,则系统的调速范围又为多少??解: 2203780.0230.1478/1430N N a e N U I R C V rpm n --⨯===378(0.0230.022)1150.1478N e I R n rpm C ⨯+∆===当s=20%时 14300.23.1(1)115(10.2)N n s D n s ⨯===∆-⨯-当s=30%时 14300.35.33(1)115(10.3)N n s D n s ⨯===∆-⨯-2.5 某龙门刨床工作台采用V-M 调速系统。
运动控制系统期中考试电控学院自动化0905贺奎(0906050509)解: 电流调节器的设计 (1) 确定时间常数1)整流装置滞后时间常数T s 。
三相桥式电路的平均失控时间T s =0.0017s 。
2)流滤波时间常数T oi 。
据题意给定T oi =0.002s 。
3)电流环小时间常数之和T i 。
按小时间常数近似处理T i =S T +oi T =0.0037s 。
4)电磁时间常数T l 。
T l =LR =15∗10−30.5s −1=0.03s −1。
5)电力拖动系统机电时间常数T m 。
T m =GD 2R375Ce C mC m =30πC eC e =0.132V ∗min/r 所以T m =0.18s(2)选择调节器结构根据设计要求σi ≤5%,并保证稳态电流无差,可按典I设计电流调节器。
电流环控制对象是双惯性型的,因此可用PI 调节器。
传递函数为W ACR =K i (τi S+1)τi S。
检查对电源电压的抗扰性能:Tl T i=0.030.0037≈8.11,其动态性能指标都可以接受。
(3)计算电流调节器参数电流调节器超前时间常数:τi =T l =0.03s 。
电流环开环增益:要求σi ≤5%时,应取K l T i =0.5,因此K l =0.5T i =0.50.0037s≈135.1s −1于是,ACR 的比例系数为 K i =K l τi R K s β=135∗0.03∗0.540∗0.05≈1.013(4)校验近似条件电流环戒指频率: ωci =K l =135.1s −11)校验晶闸管整流装置传递函数近似条件13T s=13∗0.0017s −1≈196.1>ωci 满足近似条件2)校验忽略反电动势变化对电流环动态影响条件3 1Tm T l=3∗ 10.18∗0.03s −1≈40.82s −1<ωci 满足近似条件3)校验电流环小时间常数近似处理条件131Ts T Oi=13∗10.0017∗0.002s −1≈180.8s −1>ωci 满足近似条件(5)计算调节器电阻和电容 取R 0=40k ΩR i =K i R 0=1.013∗40k Ω=40.52k Ω 取40 k Ω C i =τiR i=0.0340∗10F =0.75∗10−6F =0.75uF 取0.75 uF C oi =4T oi R 0=4∗0.00240∗10F =0.2∗10−6F =0.2uF 取0.2 uF转速调节器的设计 (1) 确定时间常数1)电流环等效时间常数1K l。

电路电流调节器及转速调节器的设计20220525一、设计题目双闭环V-M调速系统中主电路电流调节器及转速调节器的设计二、具体内容(1)主回路及其保护系统的设计;(2)转速、电流调节器及其限幅电路的设计;三、已知条件及直流电机相关参数采用晶闸管三相桥式全控整流电路供电,基本数据如下:直流电动机UN=220V,IN=136A,nN=1460r/min,电枢电阻Ra=0.2Ω,允许过载倍数λ=1.5;晶闸管装置T=0.00167,放大系数K=40;平波电抗器:电阻RP0.1、电感LP4mH;电枢回路总电阻R=0.5Ω;电枢回路总电感L=15mH;电动机轴上的总飞轮惯量GD2=22.5N·m2;电流调节器最大给定值Uim=10.2V,转速调节器最大给定值Unm=10.5V;电流滤波时间常数Toi=0.002,转速滤波时间常数Ton=0.01。
设计要求:1.稳态指标:转速无静差;2.动态指标:电流超调量i5%;空载启动到额定转速的转速超调量n10%。
四、设计要求1.写出设计说明书,内容包括(1)各主要环节的工作原理;(2)整个系统的工作原理;(3)调节器参数的计算过程。
2.画出一张详细的电气原理图3.采用Matlab中的Simulink软件对整个调速系统进行仿真研究,对计算得到的调节器参数进行校正,验证设计结果的正确性。
将Simulink仿真模型,以及启动过程中的电流、转速波形图附在设计说明书中。
五、参考文献1.阮毅,陈维钧.运动控制系统.清华大学出版社,20062.陈伯时.电力拖动自动控制系统——运动控制系统(第3版).机械工业出版社,20033.童福尧.电力拖动自动控制系统习题例题集.机械工业出版社,19934.尔桂花,窦曰轩.运动控制系统.清华大学出版社,20025.廖晓钟,刘向东.自动控制系统.北京理工大学出版社,20056.曾毅.现代运动控制系统工程.机械工业出版社,20067.余发山等.自动控制系统.中国矿业大学出版社,20058.黄俊,王兆安.电力电子变流技术(第3版).机械工业出版社,20019.李华德等.电力拖动控制系统(运动控制系统).电子工业出版社,2006六、考核方式考核方式分为课程设计报告和答辩。
PWM整流器低开关频率电流调节器设计方法宋文祥;董英;朱洪志【摘要】在低开关频率时采用传统电流调节器设计对PWM整流器进行控制,将导致dq轴电流的严重耦合,甚至系统不能正常工作.本文分析了PWM整流器的离散化模型,考虑实际系统中存在的PWM延迟,基于复矢量概念并结合整流器离散特性进行了直接离散化电流调节器设计.该设计方法不需要进行双线性变换,且其闭环系统与采样周期无关,性能稳定.通过几种离散化调节器的仿真结果对比显示了直接设计离散电流调节器的优越性能.【期刊名称】《电工电能新技术》【年(卷),期】2014(033)003【总页数】5页(P27-31)【关键词】PWM整流器;低开关频率;离散电流调节器;直接设计法【作者】宋文祥;董英;朱洪志【作者单位】上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072;上海大学机电工程与自动化学院,上海200072【正文语种】中文【中图分类】TM4611 引言PWM整流器具有交流侧电流谐波含量小,功率因数高等突出优点,因而在AC/DC功率变换中得到了广泛应用[1]。
静止坐标系下电量转换到旋转坐标系中会在dq轴之间产生交叉耦合,对这种耦合的适当处理甚至消除一直受到人们的关注,并对此研究和开发了许多控制算法。
目前大多数PWM整流器都采用数字控制器,且大多采用传统电流离散控制器的设计方法,该方法已经被广泛应用并且被证明在多数场合都是适用的。
然而在采样频率低时,用这种方法设计的控制器误差很大,甚至连系统的稳定性都不能保证[2-4]。
目前随着PWM整流器越来越多地应用在高压大容量的场合,由于受到开关器件开关损耗及散热的限制,要求开关频率一般在几百赫兹左右,这也需要设计出性能更好的离散控制器。
文献[5]针对开关频率降低时,整流器dq轴耦合严重的问题,设计基于复矢量的电流调节器,实现了网侧电流的有效解耦。
然而其未考虑离散调节器的设计问题。
运动控制期中作业电气与控制工程学院自动化1102班李珂1106050220电流调节器的设计:(1) 确定时间常数:1) 给定PWM 开关频率为5KHz ,整流装置滞后时间常数Ts ,Ts=1/f=1/5000=0.0002s2) 电流滤波时间常数Toi ,取Toi=0.002s=2ms 。
3) 电流环小时间常数之和T ∑i 。
按小时间常数近似处理,取T ∑i =Ts+Toi=0.0022s 。
(2) 选择电流调节器结构:根据设计要求σi ≦5%,并保证稳态电流无差,可按典型Ⅰ系统设计电流调节器。
电流环控制对象是双惯性型的,因此可用PI 型电流调节器,其传递函数式:W ACR (S)= iSiS Ki ττ)1(+。
检查对电源电压的抗扰性能:T l /T ∑=0022.002.0≈9.1,参看表3‐2的典型Ⅰ型系统动态抗扰性能,都是可以接受的。
(3) 计算电流调节器的参数电流调节器超前时间常数:τi=T l =0.02s电流环开环增益:要求σi ≦5%时,根据表3-1,应取K I T ∑i =0.5,因此K I =∑T 5.0=0022.05.0s -1≈227.27 s -1于是ACR 的比例系数为 Ki=βτKs RK i I K I =227.27 s -1 τi =0.02s R=0.5Ω λ=1.5所以最大允许电流为:I dm =1.5×I nom =204A,给定U im *=10V , 则β=dm im I U *=20410≈0.05取晶闸管放大系数Ks=40将以上数据带入Ki 公式内即可求出Ki ≈1.136 (4) 检验近似条件电流环截止频率: ωci =K I =227.27 s -11) 校验晶闸管整流装置传递函数的近似条件: W ci ≤sT 31s T 31=0002.031⨯ s -1≈1666.7 s -1﹥ωci 满足近似条件 2) 校验忽略反电动势变化对电流环动态影响的条件:ωc i ≧3lm T T 1 3l m T T 1=3×02.01⨯m TT m =me C C RGD 3752 C e =n R I U d d -0=0.132 C m =π30 C e =1.26T m =me C C RGD 3752≈0.183l m T T 1=3×02.018.01⨯=50<ωci 满足近似条件 3) 检验电流环小时间常数近似处理条件 ωci ≤31ois T T 131oi s T T 1= 31×002.00002.01⨯ s -1≈527.046 s -1>ωci 满足近似条件 (5)计算调节器电阻和电容:电流调节器原理图如下图示,按所运用放大器取R 0 =40K Ω,各电阻和电容值计算如下:R i =K i ×R 0 =1.136×40=45.44K Ω 取45K ΩC i =Riiτ=0.44×10﹣6 F=0.44υF 取0.44υFC oi =04R Toi⨯=0.2×10﹣6 F=0.2υF 取0.2υF按照上述参数,电流环可以达到的动态跟随性能指标为σ%=4.3%<5% 满足设计要求含给定滤波和反馈滤波的PI 型电流调节器电路图:MATLAB 仿真及仿真结果转速调节器的设计:(1) 确定时间常数:1)电流环等效时间常数1/K I 。
双闭环直流调速系统设计举例例题2-1:某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下:直流电动机:220V、136A、1460r/min,Ce=﹒min/r,允许过载倍数λ=。
晶闸管装置放大系数Ks =40。
电枢回路总电阻R=时间常数电流反馈系数β=/A(β≈10V/1.5I)N试按工程方法设计电流调节器,设计要求如下要求稳态指标:电流无静差;动态指标:电流超调量<5%。
双闭环直流调速系统结构图如下双闭环直流调速系统电流环的设计1.确定时间常数(1)整流装置滞后时间常数Ts 。
三相桥式电路的平均失控时间 T s =。
-I dLU d0 U n+--+-U iACR1/RT l s+1 RT m sU *iU cK s T s s+1 I d1 +ET 0i s+11 T 0i s+1ASR1 T 0n s+1 T 0n s+1*n n(2)电流滤波时间常数三相桥式电路每个波头的时间是3.33ms,为了基本滤平波头,应有(l~2)=3.33ms,因此取=2ms=。
(3)电流环小时间常数;按小时间常数近似处理,取=。
2.选择电流调节器结构根据设计要求:5%,而且因此可按典型1型系统设计。
电流调节器选用PI型,其传递函数为3.选择电流调节器参数ACR超前时间常数:== 。
电流环开环增益:要求5%时,应取=因此于是,ACR的比例系数为4.校验近似条件电流环截止频率s-1(1)晶闸管装置传递函数近似条件﹤现在=s-1>满足近似条件(2)忽略反电动势对电流环影响的条件:;现在,=满足近似条件。
(3)小时间常数近似处理条件:=满足近似条件。
5. 计算调节器电阻和电容取R。
=40,各电阻和电容值计算如下,取32, 取= 取按照上述参数,电流环可以达到的动态指标为:σi%=%<5%,满足设计要求。