第3章 平衡问题:矢量89方法习题解答0806
- 格式:doc
- 大小:17.60 MB
- 文档页数:19
用心 爱心 专心- 1 -物体处于静止或匀速运动状态,称之为平衡状态。
平衡状态下的物体是是物理中重要的模型,解平衡问题的基础是对物体进行受力分析。
物体的平衡在物理学中有着广泛的应用,在高考中,直接出现或间接出现的概率非常大。
本文结合近年来的高考试题探讨物体平衡问题的求解策略。
1.整体法和隔离法对于连接体的平衡问题,在不涉及物体间相互作用的内力时,应道德考虑整体法,其次再考虑隔离法。
有时一道题目的求解要整体法、隔离法交叉运用。
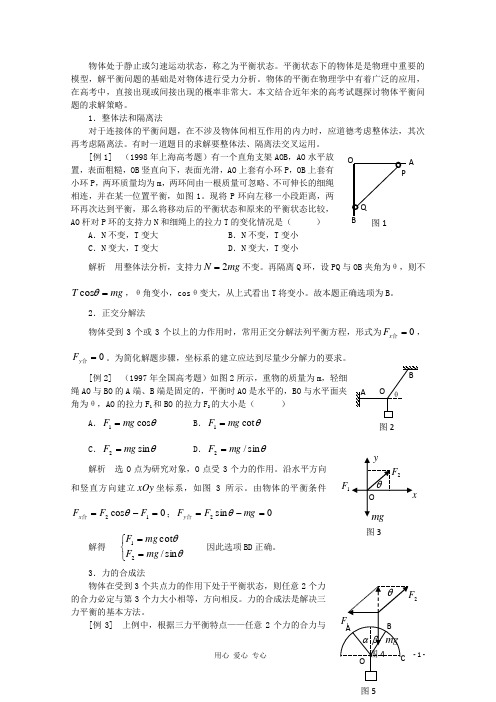
[例1] (1998年上海高考题)有一个直角支架AOB ,AO 水平放置,表面粗糙,OB 竖直向下,表面光滑,AO 上套有小环P ,OB 上套有小环P ,两环质量均为m ,两环间由一根质量可忽略、不可伸长的细绳相连,并在某一位置平衡,如图1。
现将P 环向左移一小段距离,两环再次达到平衡,那么将移动后的平衡状态和原来的平衡状态比较,AO 杆对P 环的支持力N 和细绳上的拉力T 的变化情况是( ) A .N 不变,T 变大 B .N 不变,T 变小 C .N 变大,T 变大 D .N 变大,T 变小解析 用整体法分析,支持力mg N 2=不变。
再隔离Q 环,设PQ 与OB 夹角为θ,则不mg T =θcos ,θ角变小,cos θ变大,从上式看出T 将变小。
故本题正确选项为B 。
2.正交分解法物体受到3个或3个以上的力作用时,常用正交分解法列平衡方程,形式为0=合x F ,0=合y F 。
为简化解题步骤,坐标系的建立应达到尽量少分解力的要求。
[例2] (1997年全国高考题)如图2所示,重物的质量为m ,轻细绳AO 与BO 的A 端、B 端是固定的,平衡时AO 是水平的,BO 与水平面夹角为θ,AO 的拉力F 1和BO 的拉力F 2的大小是( )A .θcos 1mg F =B .θcot 1mg F =C .θsin 2mg F =D .θsin /2mg F =解析 选O 点为研究对象,O 点受3个力的作用。

第03讲解决动态平衡问题的五种方法通过控制某些物理量,使物体的状态发生缓慢地变化,物体在这一变化过程中始终处于一系列的平衡状态中,这种平衡称为动态平衡。
解决此类问题的基本思路是化“动”为“静”,“静”中求“动”,具体有以下三种方法:(一)解析法对研究对象进行受力分析,先画出受力示意图,再根据物体的平衡条件列式求解,得到因变量与自变量的一般函数表达式,最后根据自变量的变化确定因变量的变化。
(二)结论法若合力不变,两等大分力夹角变大,则分力变大.若分力大小不变,两等大分力夹角变大,则合力变小.1、粗细均匀的电线架在A、B两根电线杆之间。
由于热胀冷缩,电线在夏、冬两季呈现如图所示的两种形状,若电线杆始终处于竖直状态,下列说法中正确的是( )A.冬季,电线对电线杆的拉力较大B.夏季,电线对电线杆的拉力较大C.夏季与冬季,电线对电线杆的拉力一样大D.夏季,电线杆对地面的压力较大2、如图所示,体操吊环运动有一个高难度的动作就是先双手撑住吊环(图甲),然后身体下移,双臂缓慢张开到图乙位置,则在此过程中,吊环的两根绳的拉力FT(两个拉力大小相等)及它们的合力F的大小变化情况为()A.FT 减小,F不变B.FT增大,F不变C.FT 增大,F减小D.FT增大,F增大3、如图所示,硬杆BC一端固定在墙上的B点,另一端装有滑轮C,重物D用绳拴住通过滑轮固定于墙上的A点。
若杆、滑轮及绳的质量和摩擦均不计,将绳的固定端从A点稍向下移,则在移动过程中( )A.绳的拉力、滑轮对绳的作用力都增大B.绳的拉力减小,滑轮对绳的作用力增大C.绳的拉力不变,滑轮对绳的作用力增大D.绳的拉力、滑轮对绳的作用力都不变(三)图解法此法常用于求解三力平衡且有一个力是恒力、另有一个力方向不变的问题。
一般按照以下流程解题。
1、如图所示,小球用细绳系住放在倾角为θ的光滑斜面上,当细绳由水平方向逐渐向上偏移时,细绳上的拉力将( )A.逐渐增大B.逐渐减小C.先增大后减小D.先减小后增大2、半圆柱体P放在粗糙的水平地面上,其右端有一固定放置的竖直挡板MN.在半圆柱体P和MN之间放有一个光滑均匀的小圆柱体Q,整个装置处于平衡状态,如图所示是这个装置的截面图.现使MN保持竖直并且缓慢地向右平移,在Q滑落到地面之前,发现P始终保持静止.则在此过程中,下列说法中正确的是()A.MN对Q的弹力逐渐减小B.P对Q的弹力逐渐增大C.地面对P的摩擦力逐渐增大D.Q所受的合力逐渐增大3、如图所示,挡板固定在斜面上,滑块m在斜面上,上表面呈弧形且左端最薄,球M搁在挡板与弧形滑块上,一切摩擦均不计,用平行于斜面的拉力F拉住弧形滑块,使球与滑块均静止。



3、物体的平衡解题方法与技巧【基本知识】一、平衡状态与平衡条件:1.平衡状态:静止或匀速直线运动状态(实质:加速度a=0)2.平衡条件:F合=0二、重要推论:1.物体在三个不平行的力的作用下处于平衡,则这三个力必为共点力。
(表示这三个力的矢量首尾相接,恰能组成一个封闭三角形)2.质点在n个力的作用下处于平衡,则其中任一力必与其余n-1个力的合力等大反向。
(表示这三个力的矢量首尾相接,恰能组成一个封闭三角形)3.若物体平衡,将物体受的所有力分解到任意两条直线方向,则任一直线方向合力均为0。
(正交分解法与斜交分解法的依据)三、解平衡问题的一般步骤:1.正确选择研究对象2.分析研究对象的受力,画出受力示意图3.将研究对象受力进行等效处理(合成、按效果分解、正交分解等等)4.用平衡条件列式求解【方法技巧】一、熟练按步骤解题:【例1】用两根绳悬挂一个重10N的小球,已知绳AO与天花板夹角为30°,绳BO与天花板夹角为45°,求两根绳分别受到的拉力。
二、三力平衡的动态分析:1.三角形一条边确定,另一条边方向已知,求第三条边的最小值【例2】已知质量为m、电荷为q的小球,在匀强电场中由静止释放后沿直线OP向斜下方运动(OP和竖直方向成θ角),那么所加匀强电场的场强E的最小值是多少?【例3】重为G的物体系在OA、OB两根等长的轻绳上,轻绳的A端和B端挂在半圆形的支架BAD上,如图2(a)所示,若固定A端的位置,将OB绳子的B端沿半圆支架从水平位置逐渐移至竖直位置C的过程中,则以下说法正确的是()A、OB绳上的拉力先增大后减小B、OB绳上的拉力先减小后增大C、OA绳上的拉力先减小后增大D、OA绳上的拉力一直逐渐减小2.相似三角形法【例4】如图所示,在半径为R的光滑半球面正上方距球心h处悬挂一定滑轮,重为G的小球A用绕过滑轮的绳子被站在地面上的人拉住。
人拉动绳子,在与球面相切的某点缓慢运动到接近顶点的过程中,试分析半球对小球的支持力N和绳子拉力F如何变化。
资料范本本资料为word版本,可以直接编辑和打印,感谢您的下载物理必修一第三章平衡问题总结地点:__________________时间:__________________说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容专题四.共点力作用下物体的平衡一、共点力作用下物体的平衡◎ 知识梳理1.共点力的判别:同时作用在同一物体上的各个力的作用线交于一点就是共点力。
这里要注意的是“同时作用”和“同一物体”两个条件,而“力的作用线交于一点”和“同一作用点”含义不同。
当物体可视为质点时,作用在该物体上的外力均可视为共点力:力的作用线的交点既可以在物体内部,也可以在物体外部。
,2.平衡状态:对质点是指静止状态或匀速直线运动状态,对转动的物体是指静止状态或匀速转动状态。
(1)二力平衡时,两个力必等大、反向、共线;(2)三力平衡时,若是非平行力,则三力作用线必交于一点,三力的矢量图必为一闭合三角形;(3)多个力共同作用处于平衡状态时,这些力在任一方向上的合力必为零;(4)多个力作用平衡时,其中任一力必与其它力的合力是平衡力;(5)若物体有加速度,则在垂直加速度的方向上的合力为零。
3.平衡力与作用力、反作用力共同点:一对平衡力和一对作用力反作用力都是大小相等、方向相反,作用在一条直线上的两个力。
【注意】①一个力可以没有平衡力,但一个力必有其反作用力。
②作用力和反作用力同时产生、同时消失;对于一对平衡力,其中一个力存在与否并不一定影响另一个力的存在。
4.正交分解法解平衡问题正交分解法是解共点力平衡问题的基本方法,其优点是不受物体所受外力多少的限制。
解题依据是根据平衡条件,将各力分解到相互垂直的两个方向上。
正交分解方向的确定:原则上可随意选取互相垂直的两个方向;但是,为解题方便通常的做法是:①使所选取的方向上有较多的力;②选取运动方向和与其相垂直的方向为正交分解的两个方向。
高中物理动态平衡问题的三种解法平衡问题是力学中常见的一种题型,解决平衡问题的基本思路是对物体进行受力分析,根据平衡条件来求解。
而动态平衡问题是指通过控制某些物理量的变化,使物体的状态发生缓慢变化,“缓慢”指物体的速度很小,可认为速度为零,所以物体在变化过程中处于平衡状态,所以把物体的这种状态称为动态平衡状态。
如图1所示,轻绳的一端系在质量为m的物体上,另一端系在一个轻质圆环上,圆环套在粗糙水平杆MN上,现用水平力F拉绳上一点,使物体处于图中实线位置,然后改变F的大小使其缓慢下降到图中虚线位置,圆环仍在原来的位置不动,则在这一过程中,水平拉力F、环与杆的摩擦力和环对杆的压力的变化情况是()A.F逐渐增大,F摩保持不变,F N逐渐增大;B.F逐渐增大,F摩逐渐增大,F N保持不变;C.F逐渐减小,F摩逐渐增大,F N逐渐减小;D.F逐渐减小,F摩逐渐减小,F N保持不变。
图1解析:以环、绳及物体整体为研究对象,受力如图1-1所示,根据平衡条件有:图1-1在物体缓慢下降的过程,系统仍然在此四个力的作用下处于平衡状态,仍然有关系式mg=F N,由牛顿第三定律可知:物体缓慢下降过程中环对杆的压力F N保持不变,F与F摩仍满足大小相等,方向相反,所以两个力同时发生改变,关键是判断物体在下降过程中F的变化规律。
方法一:计算法以物体为研究对象,受力如图1-2所示,由平衡条件可知:mg与F的合力与绳子的拉力F T等大反向,F大小满足关系式,在物体缓慢下降过程中,物体的受力情况及平衡状态保持不变,所以关系式仍然成立,但θ逐渐减小,所以F也随之减小,F摩也随之减小,D答案正确。
图1-2小结:此题为最常见的三力平衡问题,而力的合成法(这儿用的是力的合成思想,当然也可用力的正交分解来求解)与正交分解法是进行力的运算时最基本的方法。
同时需要借助数学知识中的正、余弦定理,相似三角形规律,直角三角形中勾股定理和三角函数进行综合求解,同学们应具备这种应用数学规律解决物理问题的能力,尤其要熟练掌握应用直角三角形中勾股定理和三角函数来解决物理问题。
平衡问题:物体不受力或所受合外力为零,这是物体处于平衡的条件。
解决此类问题的方法很多,包括正交分解法、矢量三角形法、相似三角形法、利用拉密定理……矢量三角形:矢量合成的平行四边形定则可以用矢量三角形法则来等效替代。
把代表两个分矢量的有向线段首尾相连,则合矢量就从第一个矢量的起点到第二个矢量的末端。
以此类推,若一个物体在三个共点力作用下处于平衡状态,则代表三个力的有向线段必定构成封闭三角形。
利用矢量三角形法在处理三力平衡问题和两力的加速(减速)问题时是非常方便的,像摩擦角这样四力动态平衡问题,用起来也很方便!尤其是动态平衡中求极值的问题迅速得到解决,而且非常直观。
解决动态平衡的一般步骤如下:①确定研究对象;②分析对象状态和受力情况,画出示意图;③将各力首尾相连,画出封闭的矢量三角形;④根据题意,画出动态变化的边角关系;⑤确认未知量变化情况。
一、两力作用下的动力学问题例1、如图所示,固定的斜面A和放在斜面上的楔形木块B的倾角均为θ=30°,已知斜面A的上表面和木块B的表面均光滑,木块B 的质量为M,上面放有质量为m的小球C,当用平行于斜面的力F 作用在木块上时,木块B和小球C保持相对静止,求推力F及木块B对小球C的弹力的大小。
解析:解决动力学问题,先对物体进行受力分析。
选择小球为研究对象,小球受到重力和B对小球的支持力(两个力),作加速运动;选择整体为研究对象,小球和木块受到重力,支持力和推力。
根据条件,小球和木块加速度相同,根据牛顿第二定律,解决此题的关键是求出木块B和小球C保持相对静止时的加速度大小。
由于小球与木块相对静止,故小球C受到的合力方向必定和木块B 的加速度的方向相同(平行于斜面),即沿斜面向下。
用三角形法则作出小球受到的合力(N与G的箭头收尾相连,以便画出合力),如图所示。
由于弹力N的方向与木块B的上表面垂直,因此弹力的方向与竖直方向的夹角为60°,不难看出,矢量三角形为等边三角形,即N=ma=mg,小球的加速度大小为g,以球和木块整体为对象,由牛顿第二定律可知解得推力的大小为:二、三力作用下的动态平衡问题例2、如图所示,光滑的小球静止在斜面和竖直放置的木板之间,已知球重为G,斜面的倾角为θ,现使木板沿逆时针方向绕O点缓慢转动,求小球对斜面和挡板的压力怎样变化?解析:选择小球为研究对象,分析小球受力如图所示,小球受重力G、挡板的支持力N1和斜面的支持力N2,小球在这三个力的作用下处于平衡状态,这三个力可构成矢量三角形(如上图)。
]第三章平衡问题:矢量方法习题解答3-1讨论图示各平衡问题是静定的还是静不定的,若是静不定的试确定其静不定的次数。
题3.1图解:(1)以AB杆为对象,A为固定端约束,约束力有3个。
如果DC杆是二力杆,则铰C处有1个约束力,这4个力组成平面一般力系,独立平衡方程有3个,所以是1次静不定;如果DC杆不是二力杆,则铰C和D处各有2个约束力,系统共有7个约束力,AB 杆和DC杆上的约束力各组成平面一般力系,独立平衡方程共有6个,所以,是1次静不定。
(2)AD梁上,固定铰链A处有2个约束力,辊轴铰链B、C和D各有1个约束力,共有5个约束力,这5个约束力组成平面一般力系,可以列出3个独立的平衡方程。
所以,AD梁是2次静不定。
(3)曲梁AB两端都是固定端约束,各有3个共6个约束力组成平面一般力系,而独立的平衡方程只有3个。
所以是3次静不定。
(4)刚架在A、B和C处都是固定端约束,各有3个共9个约束力组成平面一般力系,而独立的平衡方程只有3个。
所以是6次静不定。
(5)平面桁架在A处为固定铰链,B处为辊轴铰链,共有3约束力组成平面一般力系,而独立的平衡方程也有3个,因此,该平面桁架的外力是静定的。
平面桁架由21根杆组成,所以有21个未知轴力,加上3个支座反力,共有24个未知量。
21根杆由10个铰链连接,每个铰链受到平面汇交力系作用。
若以铰链为研究对象,可以列出2×10=20个平衡方程。
所以,此平面桁架的内力是24-20=4次静不定。
(6)整体在A处为固定铰链,B处为辊轴铰链,共有3约束力组成平面一般力系,而独立的平衡方程也有3个,因此,该系统的外力是静定的。
除了3个约束外力外,3根杆的轴力也是未知的,共有6个未知量。
AB梁可以列出3个平衡方程,连接3根杆的铰链可以列出2个平衡方程,共有5个方程,所以,该系统的内力是1次静不定。
3-2炼钢炉的送料机由跑车A与可移动的桥B组成,如图示。
跑车可沿桥上的轨道运动,两轮间距离为2米,跑车与操作架、手臂OC以及料斗相连,料斗每次装载物料重W=15kN,平臂长OC=5m。
设跑车A、操作架和所有附件总重量为P,作用于操作架的轴线。
试问P至少应多大才能使料斗在满载时不致翻倒?解:以送料机为研究对象,受力图如图示。
满载时不致翻倒的临界状态是0=NE F 。
列平衡方程:∑=0F m ,041=⨯-⨯W P ,解得kN)(601544=⨯==W P 所以,当kN 60>P 时,才能使料斗在满载时不致翻倒。
3-3梁AB 用三根杆支承,如图示。
已知kN 301=F ,kN 402=F ,m kN 30⋅=M ,kN/m 20=q 。
试求三杆的约束力。
(a) 解:以AB 以梁为研究对象,画受力图,列平衡方程0=∑x F ,060cos 60cos 1=+F F C , kN 301-=-=F F C,0∑=B m05.134860sin 360sin 821=⨯⨯+⨯+⨯+⨯--⨯-q F F F M F C A ,kN 22.63=A F .,0∑=y F 0360sin 60sin 21=⨯---++q F F F F F B C A,kN 7488.=B F . (b )解:以AB 以梁为研究对象,画受力图,列平衡方程0=∑x F , 030cos 45cos 45cos 2=--F F F B D ,∑=,0C m,0630sin 2845sin 445sin 21=⨯-⨯--⨯+⨯F F M F F B D解得:kN 4.57kN,42.8==D B F F ; ,0∑=y F030sin 45sin 45sin 21=--++F F F F F C B D ,解得:kN 45.3=C F 。
3-4试求图示多跨梁的支座反力。
已知(a )m kN 8⋅=M ,kN/m 4=q ;(b )m kN 40⋅=M ,kN/m 10=q 。
(a) 解:(1)先取BC 梁为对象,画受力图,列平衡方程 0=∑B m ,0364=⨯⨯-⨯q F C , kN 18=C F ;题3.2图题3-3图题3-3图题3-4图,0∑=y F 06=⨯-+q F F C By , kN 6=By F 0=∑x F ,kN 0=Bx F(2)再取AB 梁为对象,画受力图,列平衡方程 0=∑x F , 0=+Bx Ax F F , kN 0=-=Bx Ax F F,0∑=y F 0=-By Ay F F , kN 6=Ay F ;0=∑A m , 04=⨯--By A F M m , m kN 32⋅=A m .(b) 解:(1)先取CD 梁为对象,画受力图,列平衡方程:0=∑C m , 0124=-⨯⨯-⨯M q F D ,kN 15=D F ; ,0∑=y F 02=⨯-+-q F F D Cy , kN 5-=Cy F 0=∑x F ,kN 0=Cx F(2)再取AC 梁为对象,画受力图,列平衡方程:0=∑B m , 02122=⨯+⨯⨯-⨯-Cy Ay F q F ,kN 15-=Ay F .,0∑=y F 02=+⨯-+Cy B Ay F q F F kN 40=B F . 0=∑x F , 0=+-Cx Ax F F kN 0=Ax F .3-5梁的支承及载荷如图示。
已知:qa F =,2qa M =。
试求支座的约束力。
(a )解:(1)先取CD 梁为对象,画受力图,列平衡方程:0=∑C m ,0212=--M qa a F D , qa F D 23=。
0=∑x F ,0=Cx F 。
,0∑=y F 0=--+qa F F F D Cy qa F Cy 21=。
2)再取AC 梁为对象,画受力图,列平衡方程: 0=∑B m ,0212=---qa a F a F Cy Ay , qa F Ay -=。
0=∑x F ,0=-Cx Ax F F ,0=Ax F 。
题3-4图题3-5图,0∑=y F 0=--+qa F F F Cy B Ay , qa F B 25=。
(b )解:(1)取BC 梁为对象,画受力图。
因分布载荷呈三角形分布,B 点处的载荷集度为q /2。
列平衡方程:0=∑x F , 0=Bx F0=∑B m ,()02322221222122=⋅⋅⋅--a a q a qa F C , qa F C 65=。
,0∑=y F 021223=⋅⋅-+-a q F F C By ,qa F By 32-=(2)取AB 梁为对象,画受力图。
列平衡方程: 0=∑x F ,0=+-Bx Ax F F , 0==Bx Ax F F .0=∑A m , 023222212=⋅⋅-⋅+a a q a F M By A , 22qa M A =.,0∑=y F 02221=⋅-+a qF F By Ay , qa F Ay 67=. 3-6 图示构架中,重物W 重1200 N ,由细绳跨过滑轮E 而水平地系于墙上,尺寸为:AD=BD =2 m ,CD=DE =1.5 m 。
不计滑轮和杆的自重,求支座A 和B 处的约束力,以及杆BC 的内力。
解:(1)以整体为研究对象,显然W F T =。
列平衡方程:0=∑x F ,0=-T Ax F F , N 1200===W F F T Ax 。
=∑A m , 0)5.1()2(4=--+-⨯r F r W F T B,N 1050875.0==W F B,0∑=y F 0=-+W F F B Ay , N 150125.0==W F Ay 。
(2)以AB 杆为研究对象。
列平衡方程:0=∑D m , 02s i n 22=⨯+⨯+⨯-ϑBA B Ay F F F , 其中5325.15.1sin 22=+=ϑ。
解得N 1500-=BA F 。
题3-5图题3-6图3-7一凳子由杆AB 、BC 和AD 铰接而成,放在光滑的地面上,凳面上作用有力F 如图示。
求铰链E 处的约束力。
(1)取整体为研究对象。
0=A m ,03=-⋅Fa a F ND , F F ND 31=; (2)取AB 杆为研究对象。
0=B m ,023=⋅-⋅a F a F Ay ,F F Ay 32=(3)取AD 杆为研究对象。
,0∑=y F 0=++-ND Ey Ay F F F , F F Ey 31=。
0=∑A m ,032323=++a F a F a F ND Ey Ex , F F Ex =.3-8 图示构架由杆AB 、CD 、EF 和滑轮以及绳索组成,H 、G 和E 处为铰链,固结在杆EF 上的销钉K 放在杆CD 的光滑槽内。
已知物块M 重P 和水平力Q ,尺寸如图示。
若不计其余构件的自重和摩擦,求固定铰链支座A 和C 以及杆EF 上销钉K 的约束力。
解:(1)取整体为研究对象, 0=∑A m ,0364=⋅+⋅+⋅a P a Q a F Cy ,()P Q F Cy +-=243; ,0∑=y F 0=-+P F F Cy Ay ,()P Q F Ay 7641+=;,0∑=x F 0=++Q F F Cx Ax 。
(2)取EF 杆连同轮为研究对象,显然P F T =。
0=∑H m ,03245sin =⋅-⋅+⨯a F a P a F T NK ,P F NK 2-=.(3)取CD 杆为研究对象, 0=∑G m ,02244=⋅-⋅+⋅-a F a F a F NK Cy Cx , ()P Q F Cx --=641; 代入上面(1)中第3式,解得:()P Q F Ax -=241。
题3-7图AB 杆受力图 AD 杆受力图题3-8图 受力图(1)受力图(2) 受力图(3)3-9 滑轮B 与折杆AB 和BC 用铰链连接,如图示。
设滑轮上绳的拉力P =500 N ,不计各构件的自重,求各构件给销钉的力。
解:(1)取轮(不包括销钉)为对象, 0=∑B m ,0=⋅-⋅r P r F T , P F T =;,0∑=y F 0=-T By F F , P F F T By ==; ,0∑=x F 0=-P F Bx , P F Bx =; 轮对销钉的作用力是By Bx F F ,的反作用力。
(2)取轮连同销钉为对象,折杆 AB 和BC 都是二力杆,列平衡方程:0=∑x F ,0sin cos =-+-P F F BC BA ϑϑ,0=∑y F ,0cos sin =---T BC BA F F F ϑϑ,其中,53cos ,54sin ==ϑϑ。
解得71,55BA BC F P F P =-=。
将数据代入,得:500N,100N,700N Bx By BC BA F F F F ====-。
3-10 由杆组成的结构如图示。