CCD时序驱动电路设计
- 格式:pdf
- 大小:170.29 KB
- 文档页数:2
一种基于高速超微型单片机的CCD驱动电路设计CCD作为一种光电转换器件,由于其具有精度高、分辨率好、性能稳定等特点,目前广泛应用于图像传感和非接触式测量领域。
在CCD应用技术中,最关键的两个问题是CCD驱动时序的产生和CCD输出信号的处理。
对于CCD输出信号,可以根据CCD像素频率和输出信号幅值来选择合适的片外或片内模数转换器;而对于CCD驱动时序,则有几类常用的产生方法。
1 常用的CCD驱动时序产生方法CCD厂家众多,型号各异,其驱动时序的产生方法也多种多样,一般有以下4种:(1)数字电路驱动方法这种方法是利用数字门电路及时序电路直接构建驱动时序电路,其核心是一个时钟发生器和几路时钟分频器,各分频器对同一时钟进行分频以产生所需的各路脉冲。
该方法的特点是可以获得稳定的高速驱动脉冲,但逻辑设计和调试比较复杂,所用集成芯片较多,无法在线调整驱动频率。
2)EPROM驱动方法这种驱动电路一般在EPROM中事先存放所有的CCD时序信号数据,并由计数电路产生EPROM的地址使之输出相应的驱动时序。
该方法结构相对简单、运行可靠,但仍需地址产生硬件电路,所需EPR0M容量较大,同样也无法在线调整驱动频率。
(3)微处理器驱动方法这种方法利用单片机或DSP通过程序直接在I/O口上输出所需的各路驱动脉冲,硬件简单、调试方便、可在线调整驱动频率。
但由于是依靠程序来产生时序,如果程序设计不合理,会造成时序不均匀;而且往往会造成微处理器资源浪费;通常驱动频率不高,除非采用高速微处理器。
(4)可编程逻辑器件驱动方法这种设计方法就是利用CPLD、FPGA等可编程逻辑器件来产生时序驱动信号,硬件简单、调试方便、可靠性好,而且可以得到较高的驱动频率。
同样也可在线调整驱动频率。
电路设计完成以后,如果想更改驱动时序,只需将器件内部逻辑重新编程即可。
以上4类方法中目前常用的是微处理器驱动方法(通常又称为“软件驱动”法)和可编程逻辑器件驱动方法(又称“硬件驱动”法)。
基于CPLD的CCD驱动时序电路设计
电荷耦合器件(CCD),是一种以电荷为信号载体的光电传感器。
他具
有光电转换,电荷存储,转移和检测等功能。
广泛应用于可编程逻辑器件(PLD)是在20 世纪80 年代迅速发展起来的一种新型集成电路,随着大规模集成电路的
进一步发展,出现了PAL 和GAL 逻辑器件,而复杂可编程逻辑器件CPLD 是
在此逻辑器件基础上发展起来的,跟分立元件相比,具有速度快、容量大、功
耗小、集成度高、可靠性强等优点。
故CPLD 被广泛应用于各种电路的设计中。
l TCDl200D 简介
1.1 TCDl200D 的特点
TCDl200D 是日本东芝公司生产的双沟道线阵CcD 器件,具有灵敏度高(饱和曝光量为0.037 x-s)、暗电流低等特点。
该器件具有2 160 个像元,内部信号预处理电路包含采样保持和输出预放大电路,当温度为25℃时,该器件工作
在5 V 驱动脉冲,12 V 电源条件下。
1.2 TCDl200D 驱动时序要求
芯片正常工作需要4 路驱动信号:时钟脉冲Fl,时钟脉冲F2,转移脉冲SH 和复位脉冲RS。
其中SH 为光电荷转移脉冲,其下降沿是每行输出的起始点;F1,F2 为两相交变驱动脉冲(相位差为90。
),其作用为驱动信号电荷进行
定向转移;RS 为输出极复位脉冲,清除输出即输出一个单元电荷后所剩电荷,
以保证下一个单元电荷电压的正确输出。
在4 路脉冲的正确驱动下,该
2 驱动电路设计与实现
2.1 驱动电路设计
本设计采用wZE-SPXO10.00 MHz 晶振作为系统标准时钟。
按照。
基于FPGA的线阵CCD驱动时序电路的设计O 引言电荷耦合器件(Charge Coupled Deviees,CCD)是一种图像传感器,它在工业、计算机图像处理、军事等方面都得到广泛的应用。
目前CCD 的应用技术已成为集光学、电子学、精密机械与计算机技术为一体的综合技术,在现代光子学、光电检测技术和现代测试技术领域中起到了相当大的作用。
因此,CCD 的作用是不可估量的。
然而,CCD 要正常工作是要驱动时序的,虽然有些CCD 往往自带驱动,但是在特殊需要或需要加特殊功能时,CCD 驱动往往需要自己设计,例如曝光时间可调等功能。
现场可编程门阵列(Field Programmahie Gate Array,FPGA)是在PAL,GAL,EPLD 等可编程器件的基础上进一步发展的产物。
它是作为专用集成电路(ASIC)领域中的一种半定制电路而出现的,既解决了定制电路的不足,又克服了原有可编程器件门电路数有限的缺点。
由于FPGA 具有易修改,在线编程等特点,可根据不同要求进行在线配置,从而升级方便。
另外由于FPGA 集成度高,可将系统的部分或全部功能集成在一片芯片上,可减小系统硬件复杂度。
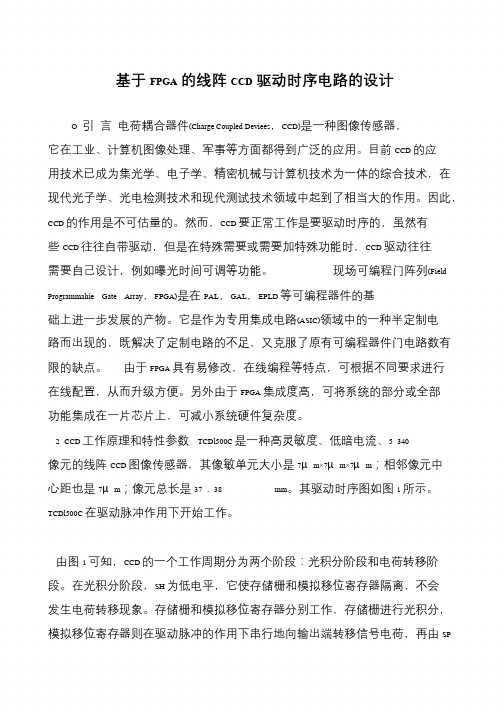
2 CCD 工作原理和特性参数TCDl500C 是一种高灵敏度、低暗电流、5 340 像元的线阵CCD 图像传感器,其像敏单元大小是7μm×7μm×7μm;相邻像元中心距也是7μm;像元总长是37.38 mm。
其驱动时序图如图1 所示。
TCDl500C 在驱动脉冲作用下开始工作。
由图1 可知,CCD 的一个工作周期分为两个阶段:光积分阶段和电荷转移阶段。
在光积分阶段,SH 为低电平,它使存储栅和模拟移位寄存器隔离,不会发生电荷转移现象。
存储栅和模拟移位寄存器分别工作,存储栅进行光积分,模拟移位寄存器则在驱动脉冲的作用下串行地向输出端转移信号电荷,再由SP。


摘要:本文以tcd1501c型ccd图像传感器为例。
介绍了其性能参数及外围驱动电路的设计,驱动时序参数可以通过vhdl程序灵活设置。
该电路已成功开发并应用于某型非接触式位置测量产品中。
关键词:ccd 驱动时序放大器1引言电荷耦合器件(ccd)是20世纪60年代末期出现的新型半导体器件。
目前随着ccd器件性能不断提高。
ccd驱动器有两种:一种是在脉冲作用下ccd器件输出模拟信号,经后端增益调整电路进行电压或功率放大再送给用户:另一种是在此基础上还包含将其模拟量按一定的输出格式进行数字化的部分,然后将数字信息传输给用户,通常的线阵ccd摄像机就指后者,外加机械扫描装置即可成像[1]。
所以根据不同应用领域和技术指标要求。
选择不同型号的线阵ccd器件,设计方便灵活的驱动电路与之匹配是ccd应用中的关键技术之一。
2ccd工作原理ccd是以电荷作为信号,而不同于其他大多数器件是以电流或者电压为信号,其基本功能是信号电荷的产生、存储、传输和检测。
当光入射到ccd的光敏面时,ccd首先完成光电转换,即产生与入射光辐射量成线性关系的光电荷。
ccd的工作原理是被摄物体反射光线到ccd器件上,ccd根据光的强弱积聚相应的电荷,产生与光电荷量成正比的弱电压信号,经过滤波、放大处理,通过驱动电路输出一个能表示敏感物体光强弱的电信号或标准的视频信号。
基于上述将一维光学信息转变为电信息输出的原理,线阵ccd可以实现图像传感和尺寸测量的功能。
3驱动电路的实现图像传感器tcd1501c的主要技术指标如下:像敏单元数为5 000;像元尺寸为7μm×7μm;像元中心距为7μm;像元总长为35mm;光谱响应范围为400nm-1000nm.光谱响应峰值波长为550nm,灵敏度为10.4v/lx.s~15.6v/lx.s。
使ccd芯片正常工作的驱动电路主要有两大功能:一是产生ccd工作所需的多路时序脉冲;二是对ccd输出的原始模拟信号进行处理,包括增益放大、差分信号到单端信号的转换[2]。

基于FPGA的TDICCD驱动时序设计黄美玲 张伯珩 边川平 李露瑶(中国科学院西安光学精密机械研究所,西安710068)摘要在分析TDICCD器件驱动时序关系的基础上,设计了可选积分级数的驱动时序发生器.作为卫星上的有效载荷,TDICCD成像系统可以根据不同的光照条件及探测分辨率的需求,选择不同积分级数,提高成像系统的灵敏度。
选用现场可编程门阵列(FPGA)作为硬件设计平台,使用VHDL语言对驱动时序发生器进行硬件描述,采用QuartusⅡ对所设计的驱动时序发生器进行了仿真。
系统测试结果表明,所研制的驱动时序发生器可以满足TDICCD驱动要求.关键词:TDICCD,时序;现场可编程门阵列(FPGA);中图分类号TN386.5文献标识码A0 引言时间延时积分电荷耦合器件 (Time Delay and Integration Charge Coupled Devices)(TDICCD)是近几年发展起来的一种新型光电传感器。
主要应用在低照度条件下,对低照度目标有很高的灵敏度[1]。
TDICCD通过多级积分来延长积分时间,从而提高器件的灵敏度和信噪比。
TDICCD成像系统一般由CCD感光芯片,驱动时序发生器,逻辑控制单元,信号处理单元以及外部光学成像系统等部分组成,其中关键是驱动信号的产生。
CCD芯片的转换效率、信噪比等光电转换特性只有在合适的时序脉冲驱动下,才能达到器件工艺所规定的最佳值而输出稳定可靠的视频信号。
驱动时序发生器性能的优劣直接决定了CCD相机的品质参数[2]。
本文分析了IT-EC-6144型TDICCD图像传感器芯片的工作过程和对驱动时序的要求,在此基础上设计出合理的时序控制方案.由于目前CCD应用向高速、小型化、智能化方向发展。
可编程逻辑器件(FPGA)以其高集成度、高速度、高可靠性、开发周期短,可满足这些需要,另外可编程逻辑器件可以通过软件编程对其硬件的结构和工作方式进行重构,从而使得硬件的设计如同软件设计那样方便快捷,因此,选用可编程逻辑器件(FPGA)作为硬件设计平台,结合VHDL语言对时序驱动电路进行硬 件描述,采用QuartusⅡ软件对所设计的时序发生器成功的进行了系统仿真。
基于FPGA的线阵CCD驱动时序电路设计
1 引言
电荷耦合器CCD具有尺寸小、精度高、功耗低、寿命长、测量精度高等优点,在图像传感和非接触测量领域得到了广泛应用。
由于CCD芯片的转换效率、信噪比等光电特性只有在合适的时序驱动下才能达到器件工艺设计所要求的最佳值,以及稳定的输出信号,因此驱动时序的设计是应用的关键问题之一。
通用CCD驱动设计有4种实现方式:EPROM驱动法;IC驱动法;单片机驱动法以及可编程逻辑器件(PLD)驱动法。
基于FPGA设计的驱动电路是可再编程的,与传统的方法相比,其优点是集成度高、速度快、可靠性好。
若要改变驱动电路的时序,增减某些功能,仅需要对器件重新编程即可,在不改变任何硬件的情况下,即可实现驱动电路的更新换代。
2 CD 1501D CCD工作参数及时序分析
2.1 TCDl50lD CCD工作参数。
线阵CCD驱动电路的FPGA时序设计实验目标设计一线阵CCD驱动时钟,用一输入的clk,驱动CCD、AD、FIFO组成的整个CCD系统,并要求有一个复位端reset。
本实验主要是基于FPGA设计线阵CCD器件复杂驱动电路和整个CCD的电子系统控制逻辑时序的方法,并给出时序仿真波形,通过对线阵CCD驱动电路的时序设计,了解一个系统设计的基本方法。
总体方案元器件选择1、CCD:sonyILX5112、AD:Analog Devices --- AD92243、FIFO:Integrated Device Technology --- IDT7204方案:FPGA产生CCD线阵、AD、FIFO所需要的驱动时钟,从而实现ccd线阵信号的采集到信号调理,再经由AD进行模数转换后经FIFO 实现信号输出到读接口的过程。
我们需要用一个输入的clk,产生CCD、AD、FIFO所需要的clk,用以驱动它们。
CCD 需要两个时钟:rog和clk,AD和FIFO分别需要一个clk。
实验程序:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity ccd isport(clk,reset:in std_logic;rog,ccd1,ad1,fifo1:out std_logic);end ccd;architecture ccd_1 of ccd issignal count:integer range 0 to 2130;signal rog2:std_logic;signal ccd2:std_logic;signal ad2:std_logic; signal fifo2:std_logic; beginrog<=rog2;ccd1<=ccd2 or clk; ad1<=ad2 or clk; fifo1<=fifo2 or clk; process(reset,clk) beginif reset='0' thenrog2<='1';ccd2<='1';ad2<='1';count<=0;elsif clk'event and clk='1' then count<=count+1;case count iswhen 0 to 6=>rog2<='1';ccd2<='1';ad2<='1';fifo2<='1';when 7 to 16=>rog2<='0';ccd2<='1';fifo2<='1'; when 17 to 22=> rog2<='1';ccd2<='1';ad2<='1';fifo2<='1'; when 23 to 55=> rog2<='1';ccd2<='0';ad2<='1';fifo2<='1'; when 56 to 58=>ccd2<='0';ad2<='0';fifo2<='1';when 59 to 2106=> rog2<='1';ccd2<='0';ad2<='0';fifo2<='0';when 2107 to 2109=> rog2<='1';ccd2<='0';ad2<='0';when 2110 to 2130=> rog2<='1';ccd2<='0';ad2<='1';fifo2<='1';end case;if count>=2130 then count<=0;end if;end if;end process;end ccd_1;仿真结果:全图:实验报告;通过本次实验加深了对CCD的了解,掌握了VHDL的使用方法,加深了解时序电路的设计法。
第29卷第1期2006年2月
电子测量技术
ELECTR ONIC MEASUR EM ENT T ECH NOLOGY
技术应用CCD时序驱动电路设计
王盛艳李刚天津大学
摘要文中以IL2C622048C型CCD为例,介绍基于CPLD的CCD时序驱动电路的设汁方法。
结果表明,本设计各项参数及指标均符合实际工作需要。
此方法也可适用于其它类型的CCD驱动电路设计。
关键词电荷耦合器件(CCD)复杂可编程逻辑器件(CPLD)时序驱动电路
Design on driving time circuit of CCD
Wang Shengyan Li Gang
Abstr act In this paper,taking IL2C622048C as an example,the design of timing circuit with CPUD is presented.As a result,this design is well wor ked in actual cir cuit.T he t echnique can also be a pplied in ot her similar design.
Keywords Charge Coupled Devices(CCD)Complex P rogr ammable Logic Device(CP LD)Driving t ime circuit
CCD广泛应用于众多光电检测领域。
要使CCD稳定可靠地工作,必须设计出符合CCD正常工作所要求的时序驱动信号,才能充分发挥CCD 的光电转换功能。
因此,CCD工作时序驱动电路的设计是CCD应用的关键。
虽然,不同厂家、不同型号的CCD,其时序驱动电路设计不尽相同,但大部分CCD的驱动电路设计都有其相似性。
传统的CCD工作时序产生方法有EPROM方法、IC方法、单片机方法等,但都已经不能很好地满足CCD应用向高速、小型化、智能化发展地需要。
CPLD由于集成度高,在速度和时序控制上有着很大的优势,并且电路设计完成后,如果想更改逻辑设计,只需将CPLD逻辑重新编程既可,因此非常适合用来做CCD的工作时序设计、制作、调试以及进一步的开发。
目前,大多数CCD工作时序设计都是采用CPLD来实现完成的。
1CCD工作时序分析
文中采用IL2C622048C型CCD,其有效信号个数是2048个,隔离信号和暗信号共9个,最高数据输出率达25MH z。
它在六路工作时序驱动脉冲作用下工作,分别是转移脉冲T CK,输出复位脉冲RST,电荷读出脉冲CRl、CR2、CR3、CR4。
图1是其各路工作时序之间的关系。
CCD的一个工作周期分两个阶段:光积分阶段和电荷转移阶段。
T CK低电平阶段,进行光积分(同时上一周期的光积分电荷信号在四相读出时钟CR的左右下,逐个信号依次输出到OS端)。
考虑到所有信号(包括有效信号和无效信号)的读出需要的总时间,光积分时间必须大于2057个CR 周期;T CK高电平阶段,各像元的光积分电荷转移到相应的读出转移寄存器中,为保证信号电荷的
充分转移,TCK高电平持续时间t
2应大于1000ns。
RST信号是清除转移寄存器中的残余电荷,所以其频率应和数据读出时钟脉冲频率一致,
且t
6应不小于7ns,以充分去除残余电荷对下一个像元信号电荷的干扰,同时由于信号电荷是在CR3阶段读出[3],它和读出时钟CR3需满足如下
条件:t
3、t4要大于0ns。
读出时钟脉冲时序有四路,为保证信号电荷充分转移至OS端,各相邻读
出时钟高电平交叠时间t
5应不小于5ns:同时为不使CRl影响光积分后的信号电荷到读出转移寄存器的转移过程,在TCK转移脉冲启动开始时, CR1必须至少提前t2时间启动,结束时也至少应
滞后t
2时间结束(图1中只标出T CK降沿时间到
CRl下降沿时间的t2),t2值大于40ns。
图1只给出了各路工作时序开始部分的波形,后面表示积分时间的波形没有给出,因为后面积分时间的长短可以由根据测量系统精度要求和积分时间的需要进行适当设定[3],但是应考虑CCD暗电流的增加对系
图1I L2C612048C的工作时序关系图
作者简介:王盛艳,女,天津大学在读硕士研究生。
#
56 #
统误差精度的影响应在测量许可范围内。
通过以上分析,结合工作中检测系统的应用要求,确定数据输出率为1215M,系统提供50M频率的基准时钟,CR的相邻驱动脉冲时序相位相差P/2,即由CR1开始,后面的CR时钟相位上依次推迟P/2。
根据给出的各路工作驱动时序关系及各时序参数,算出各路波形的周期和占空比。
2时序设计及仿真结果
设计用MAX7000S系列中EPM7128SLC84110作为CCD驱动时序设计的核心芯片,同时采用Maxpluslll012软件来实现CPLD芯片的设计。
Maxplusll能够支持CPLD器件的设计、编译和逻辑模拟,并能对输入的原理图设计、硬件语言描述设计等进行功能模拟和波形显示,非常适合CCD的工作时序的设计和仿真。
CCD时序设计由于CCD芯片需要复杂的四相交迭驱动脉冲,整个驱动时序的设计若单采用原理图设计将变得非常复杂。
与原理图输入法相比,硬件描述语言则与电路的结构相关,数字系统的设计直接面向用户需求,根据系统的行为和功能要求,可自上向下地逐层完成相应的描述、综合、优化、仿真与验证,直到生成最终的硬件电路。
所以对于CCD各路时序的产生,采用VH DL硬件描述语言来实现,最后再与原理图设计法结合来完成整个CCD工作时序的编写。
根据各路时序脉冲和系统检测的要求,在此设计了三个计数器分别对基准时钟进行同步计数,实现T CK、RST和CRx(1、2、3、4)的脉冲时序。
每个时钟各用一个进程来实现,按照各自时序特点进行编写。
这便于后期的调试和修改。
三个计数器(cnt、cnta、cntb)分别对8323、4和2进行计数。
对于TCK时钟,用cnt计数器来控制其高、低电平持续时间;对于RST时钟,同样用cnta计数器来实现;对于CR1时钟,稍微复杂,需要两个计数器(cnt、cntb)来控制:用cnt计数器来实现其周期起始部分时序要求,用cntb计数器来实现CR1的周期及高低电平转换;CR2时钟的编写与CR1时钟编写相似,只是通过cnt和cntb不同的计数值,在CR1时钟的基础上相位延迟了20ns; CR3、CR4时钟是分别对CR1、CR2结果取反得到。
值得注意的是,各个计数器是对基准时钟进行同步计数的,在cnt计数器为0重新开始计数时,各个计数器还需与初始计数值保持一致,即cnta、cntb此时也应为0,否则会导致CCD工作时序的不稳定。
这可通过对cnt的计数值略做调整予以实现。
至此,就完成了对CCD各路工作驱动时钟的编写。
各路时序之间的对应关系,可通过波形仿真结果,对这三个计数器的计数值进行修改即可。
CCD时序的波形仿真结果及分析完成CCD的各路工作驱动时序的VH DL语言编写后,程序下载到CPLD芯片前,进行了波形仿真,结果见图2。
图2未经/毛刺0处理的波形仿真图
从图2见到一些不期望的/毛刺0存在。
这会造成逻辑电路的不稳定。
在CPLD器件内,当多路高频信号电平值发生变化的瞬间,经常会出现/毛刺0现象。
因此在用CPLD设计CCD的工作时序时,为了保证CCD的正常稳定工作并且能够获得高质量的输出信号,还要尽量消除/毛刺0现象。
减少/毛刺0现象的方法有不少[4],有调整路径延时、修改逻辑设计、引入选通信号等。
CCD 工作时序中的/毛刺0去除原则:应不影响工作驱动时序的时序特性,尽量少对逻辑设计进行修改。
结合系统的设计特点及要求,此处设计了有效简便的D触发器来对/毛刺0进行处理。
对于D触发器来说,只要毛剌不出现在时钟的上升沿并且满足数据的建立和保持时间,就不会对系统造成危害(由于毛刺很短,多为几纳秒,基本上都不可能满足数据的建立和保持时间),因此可以认为D的输入端对毛刺信号不敏感。
基于以上认识,在输出信号的保持时间内,用D触发器来读取组合逻辑的输出信号就成为一种行之有效的方法。
由于设计中/毛刺0只出现在TCK时钟里,因此在整个CCD工作时序设计中,只设计加入了一个D触发器,其输入数据端接T CK时钟输出端,并用系统的高频基准时钟作为D触发器的时钟输入信号,输出端即是需要的TCK时钟。
CPLD输出的各路时序信号经相应的电路驱动后,即为符合CCD实际要求的驱动时序信号。
本文所介绍的设计方法,尤其适用于高速、高灵敏度线阵CCD的时序设计。
对于设计CCD时序驱动电路的研究者,具有一定的参考意义。
参考文献
[1]黄正瑾,徐坚等.CP LD系统设计技术入门与应用
[M].北京:电子工业出版社,2004.
[2]王庆有.图像传感器应用技术[M].北京:电子工
业出片社,2003.
[3]DALSA IL2C622048C Image Sensor datasheet.http://
www1dalsa1com
[4]何伟,张玲.消除CPLD/F PGA器件设计中的毛
刺[J].重庆大学学报,2002(12).
#
57
#
第1期王盛艳等:CCD时序驱动电路设计。