夹持装置中的增力机构
- 格式:doc
- 大小:197.00 KB
- 文档页数:4


增力机构中的夹具设计作者:孙俊杰,指导教师:赵冉(山东农业大学,讲师)【摘要】本文介绍了手动夹具的现状及发展方向,针对污染较为严重的液压夹具,提出了手动夹具替代机动夹具改进与替代方法。
本文主要内容是创新增力机构、增力机构的组合及类型,手动夹具绿色化程度最高,而其能提供的初始作用力较小,通过采用多级串联增力机构,将手动作用力进行放大以达到工作要求;另外利用手动冲击方式来得到相对大得多的初始作用力,以弥补手动作用力不足的缺陷。
关键词:夹具增力机构初始作用力The Force of the Institutions For Fixture DesignAuthor:Sun Junjie, Supervisor:Zhao Ran(Shandong Agricultural University , lecturer)Abstract This paper describes the manual fixture status and development for more polluting hydraulic clamp, made a manual alternative to motorized fixture fixture improvements and alternatives.This article contents is an innovative force amplifier, by a combination of force and type of institution, highest degree of manual clamps green, and its initial force can provide a smaller, growing through the use of multi-level power sector in series, the manual force toamplification to achieve the work requirements; another way to use manual to get a relatively larger impact of the initial force, enough force to compensate for hand defects.Keywords: fixture force amplifier initial force1绪论1.1技术背景从能源形势上看,手动夹具的绿色化程度是最高的。


夹持装置中的增力机构不同的增力机构,由于结构形式的不同,其力传递效率、自锁程度以及其他技术性能都存在着一定的差异。
目前,机械中较为常用的增力机构主要有基于长度效应、角度效应、面积效应的增力机构以及其他一些组合增力机构等等2.1一次增力机构2.1.1.1杠杆机构在长度效应装置的逻辑分类体系中,杠杆机构不是通常意义上的杠杆,而是一类与普通杠杆具有相同增力特性的装置的总称。
它包括平面杠杆,即一般所谓的杠杆机构和轮轴杠杆机构。
轮轴杠杆机构的种类太多,为了研究的方便,本文只涉及轮轴杠杆机构最常出现的形式——同轴杠杆机构。
由于在增力系数的计算方面,平面杠杆机构和同轴杠杆机构都可以直接用公式i=nl1/l2来求解,所以把它归为一类,总称杠杆机构。
(1)同轴杠杆机构同轴杠杆机构是轮轴机构中作用构件绕在同一轴转动的装置,可以看作是杠杆的一种变形机构,其力传递实质是杠杆效应。
同轴杠杆包括常见的齿轮机构、挠性机构、间歇机构和摩擦传动机构等,它们的特点是都可以分解出主动臂和被动臂,而其旋转轴就相当于普通杠杆机构的支点。
它们的增力系数的计算公式都可以由下式得出:i=nLl1/l2式中:nL——同轴机构主动臂;l1——同轴机构被动臂;l2——同轴杠杆传递效率。
(2)平面杠杆机构利用杠杆使原动力转变为夹紧力的机构称为平面杠杆机构。
平面杠杆机构一般不能自锁,所以大多和斜楔、螺栓、凸轮组合使用,或以气压或液压作为夹紧动力源。
平面杠杆机构结构紧凑,并且容易变换作用力的方向,因此在复合夹紧机构中应用十分广泛。
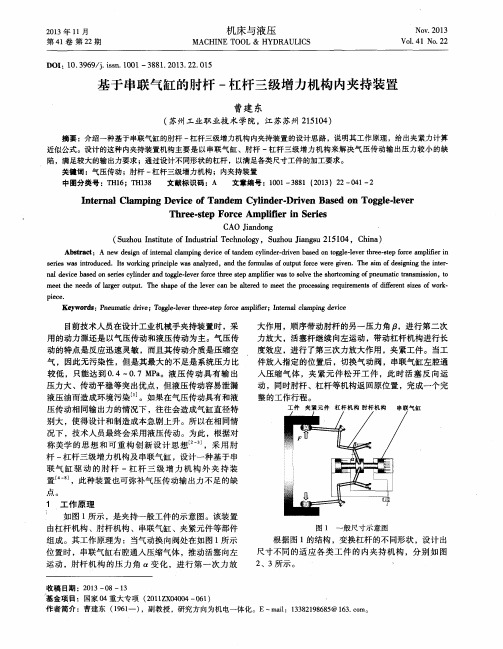
这种杠杆机构有三种形式,结构如图所示。
一般杠杆机构的支点在杠杆的受力点和夹紧点之间,因此它的增力系数和行程比有时大于1,有时等于1,有时则可能小于1;恒增力杠杆机构的主动臂l1总大于被动臂l2因此它的增力系数i永远大于1,而行程比i则小于1。
杠杆原理作为一种省力原理,一直贯穿于我们的生活当中,从新石器时代的简单器具一直贯穿到现在仍然在使用的复杂器具。

应用在工装夹具中两种油压增力装置
柏国清
【期刊名称】《机械工程师》
【年(卷),期】2009(000)007
【摘要】介绍了一种利用从气动到油压的增力装置的结构原理和计算方法,以及一种利用手动的油压增力装置结构.并分别阐明了两种增压装置的应用特点.
【总页数】2页(P137-138)
【作者】柏国清
【作者单位】威胜利工程有限公司,合肥,230601
【正文语种】中文
【中图分类】TH137.83
【相关文献】
1.基于铰杆-杠杆增力的两种液压夹具的技术性能对比 [J], 杨益;钟康民
2.圆柱-钢球增力机构在液压夹具中的应用 [J], 孙宾;钟康民
3.ANSYS在超高压液压增力装置分析中的应用 [J], 王亚丽;杨林;肖永飞
4.桩基夹持装置中的增力机构及其结构紧凑性分析 [J], 张磊;汤俊
5.局部法兰堵漏夹具在化工装置中的应用 [J], 李少波
因版权原因,仅展示原文概要,查看原文内容请购买。
专利名称:快速夹持与释放的夹紧力放大机构专利类型:发明专利
发明人:陶晓旺,李庆学,李红强,吉鸣
申请号:CN201310272695.4
申请日:20130702
公开号:CN103300992A
公开日:
20130918
专利内容由知识产权出版社提供
摘要:本发明涉及一种快速夹持与释放的夹紧力放大机构,其特征在于:其包括枢轴连接的上卡爪和下卡爪,所述上卡爪和下卡爪的同一侧面均设置有勾形部,所述上卡爪的另一侧面上还设置有绑带接口,所述绑带接口上设置有贯通的纵长的绑带槽。
本发明解决了背景技术中存在的缺陷,并且结构简单、安装方便。
使用时,简单地挂在手术床上的导轨上即可,并利用绑带提供的拉紧力实现自锁,还可以根据捆绑的位置调整绑带的角度,在绑带松开的情况下不会自行脱落,解绑带时不需张紧绑带,具有很好的安全性、易操作性、社会效益和经济效益。
申请人:迈柯唯医疗设备(苏州)有限公司
地址:215024 江苏省苏州市工业园区方洲路158号
国籍:CN
代理机构:南京纵横知识产权代理有限公司
代理人:董建林
更多信息请下载全文后查看。
第2 章夹持装置中的增力机构
不同的增力机构,由于结构形式的不同,其力传递效率、自锁程度以及其他技术性能都存在着一定的差异。
目前,机械中较为常用的增力机构主要有基于长度效应、角度效应、面积效应的增力机构以及其他一些组合增力机构等等。
2.1 一次增力机构
2.1.1 基于长度效应的增力机构
2.1.1.1 杠杆机构
在长度效应装置的逻辑分类体系中,杠杆机构不是通常意义上的杠杆,而是一类与普
通杠杆具有相同增力特性的装置的总称。
它包括平面杠杆,即一般所谓的杠杆机构和轮
轴杠杆机构。
轮轴杠杆机构的种类太多,为了研究的方便,本文只涉及轮轴杠杆机构最常出现的形式——同轴杠杆机构。
由于在增力系数的计算方面,平面杠杆机构和同轴杠杆机构都可以直接用公式i=nl1/l2 来求解,所以把它归为一类,总称杠杆机构。
(1)同轴杠杆机构
同轴杠杆机构是轮轴机构中作用构件绕在同一轴转动的装置,可以看作是杠杆的一种
变形机构,其力传递实质是杠杆效应。
同轴杠杆包括常见的齿轮机构、挠性机构、间歇机构和摩擦传动机构等,它们的特点是都可以分解出主动臂和被动臂,而其旋转轴就相当于普通杠杆机构的支点。
它们的增力系数的计算公式都可以由下式得出:
i=nLl1/l2
式中:nL——同轴机构主动臂;
l1——同轴机构被动臂;
l2——同轴杠杆传递效率。
(2)平面杠杆机构
利用杠杆使原动力转变为夹紧力的机构称为平面杠杆机构。
平面杠杆机构一般不能自锁,所以大多和斜楔、螺栓、凸轮组合使用,或以气压或液压作为夹紧动力源。
平面杠杆机构结构紧凑,并且容易变换作用力的方向,因此在复合夹紧机构中应用十分广泛。
这种杠杆机构有三种形式,结构如图所示。
一般杠杆机构的支点在杠杆的受力点和夹紧点之间,因此它的增力系数和行程比有时大于1,有时等于1,有时则可能小于1;恒增力杠杆机构的主动臂l1 总大于被动臂l2 因此它的增力系数i 永远大于1,而行程比is 则小于1。
杠杆原理作为一种省力原理,一直贯穿于我们的生活当中,从新石器时代的简单器具一直贯穿到现在仍然在使用的复杂器具。
例如,筷子、剪刀、重量称等等,可以把杠杆原理的运用简单分为三类:最主要一类是省力;另一类是保持平衡,测量物体重量,典型例子就是天平、秤等;还有一类就是改变力的方向,例如跷跷板等。
这些机构的设计都用了相同的原理,使之达到造物利人的目的。
2.1.1.2 杠杆机构的变形形式
(1)齿轮传动
一对齿轮是靠主动轮轮齿一次推动从动轮轮齿而实现运动的传递,两个齿轮的平均传动比恒等于其齿数的反比,即:
(2)滑轮机构
滑轮机构机构其实也是杠杆机构的变形形式,可以分为定滑轮和动滑轮两种。
判定给定机构是动滑轮还是定滑轮,主要是看利用滑轮工作时,滑轮的轴是否随着物体移动。
如果物体移动时,轴并不跟随物体一起移动,则该滑轮为定滑轮;如果轴与物体一起移动,则该滑轮为动滑轮。
定滑轮不省力。
使用定滑轮提升重物时,在定滑轮所在的平面上,无论拉力方向如何,拉力的大小都一样。
因为定滑轮是杠杆类的简单机械,其支点是在定滑轮的轴上,而拉力的方向都是沿着轮的切线方向,所以拉力大小不变,其增力系数为 1;但是,定滑轮可以改变物体的速度以及加速度方向。
使用动滑轮提起重物时,在动滑轮所在的平面上,能够省一半的力。
当然这是有条件的,即必须使拉力的方向始终保持竖直向上,此时其增力系数为 1/2,否则结论是不成立的。
因为当拉力不是竖直向上时,此时的动力臂一定小于滑轮直径,而阻力和阻力臂都没有改变,由杠杆原理可知,拉力必然要大于阻力的一半;在省力的同时,动滑轮不能改变力的方向。
2.1.2 基于角度效应的增力机构
角度效应增力装置是利用机构中某些组件的角度效应实现增力功能的装置,它可分为两大类:斜面效应装置和铰杆效应装置。
这些装置的增力系数的计算工式一般采用a n i tan / 的形式,其逻辑分类框图如图2-4 所示。
2.1.2.1 斜面效应装置
利用具有一定倾斜角的斜面实现增力的装置称为斜面效应装置。
斜楔机构、螺旋机构
和凸轮机构又有定压力角机构和变压力角机构之分。
1斜楔机构
斜楔增力机构具有制造容易、结构简单、调整方便等优点,在机械化传动中应用较广。
斜楔机构是利用斜楔斜面将原始力转变为夹紧力的装置,用于工件的夹紧表面比较准确并且斜楔的工作表面容易接触到的情况,但夹紧时,斜楔有拖着工件移动的趋势,所以要有一止动销定位。
当斜楔角α小于45°时,具有增力性能。
斜楔所产生的夹紧力,随着楔角的减小而增大,但同时也增加了摩擦损失,降低了机构的工作效率,有效行程也随着减小。
因此,在实际应用中可以根据需要设计选择不同的斜楔角,并可以设计成许多不同的形式,如单面斜楔、双面斜楔、双斜楔角斜楔增力机构等。
在斜角很小的情况下,斜楔机构是常用的夹紧机构之一,一般都具有增力性能。
斜楔所产生的夹紧力随着楔角的减小而增大,但同时也增加了摩擦损失,降低了机构的工作效率,有效行程也随之减小。
因此,在实际应用中可以根据需要设计选择不同的斜楔角,并可以设计成许多不同的形式,如单面斜楔、双面斜楔、双斜楔角斜楔增力机构等。
在斜角很小的情况下,斜楔机构是常用的夹紧机构之一,一般都具有自锁和力放大两种特性。
当斜楔角较大时,斜楔机构也是常用的运动转换机构之一。
若只用单楔而不用滚轮时,摩擦力的值要大的多。
因此,在机动夹紧装置中一般都应采用带滚轮的楔式增力机构。
图2-5 所示为定斜楔角无滚子斜楔机构,图2-6 所示为变斜楔角有滚子斜楔机构。
2螺旋机构
螺旋机构在目前的夹紧装置中应用很广,其结构比较简单。
它有两种不同的形式,种是定螺纹升角的螺旋夹紧机构,一种是变螺纹升角的螺旋夹紧机构。
当螺纹升角很小时用同一原始力夹紧时,螺旋机构可获得较大的夹紧力,这是其它简单夹紧件所不及的。
旋传动可以将转动变换成为直线运动,将扭矩转换成为沿着轴向的力。
同时,因为螺纹有自锁功能,所以在某些工作场合中(例如用于夹紧过程),就可以利用这一特性保证夹
动作的安全性。
简单螺旋机构的实际增力系数可用下式计算:。