D-S证据理论在目标识别中的应用
- 格式:pdf
- 大小:824.96 KB
- 文档页数:2
D-S证据理论改进相关综述发布时间:2022-09-08T09:02:08.884Z 来源:《科技新时代》2022年2月4期作者:杨亚琨,[导读] 在目标识别领域的数据融合技术当中,D-S证据理论被广泛应用,主要在于D-S证据理论可杨亚琨,单位:湖南农业大学-信息与智能科学技术学院摘要:在目标识别领域的数据融合技术当中,D-S证据理论被广泛应用,主要在于D-S证据理论可以有效的处理不确定信息。
可有效处理复杂环境下引起的不确定问题,使其处理不确定信息时更加的高效。
其缺点是在高冲突的证据发生时,得不到有效结果。
本研究为探寻一种能够优化证据理论的方法,使其达到高冲突证据环境中,还能得到不偏离现实的有效融合结果的目的,研究并整理了大量相关文献,研究过程中发现有学者针对此方向有过探究,但效果不甚理想。
基于此,本文经查阅大量国内外相关文献,为探寻一种解决高冲突证据问题的方法后分析和整理成为本篇综述。
关键词:D-S证据理论;不确定信息;高冲突证据;优化1.引言1967年,证据理论首次问世,提出人是Dempster。
同年,Shafer通过研究进一步完善并确立了证据理论概念。
因此证据理论又被命名为D-S(Dempster-Shafer)证据理论,以此纪念两位伟大的研究先驱。
D-S证据理论由于对不确定信息的多元化高效处理,能在目标识别领域发挥出巨大作用。
由于D-S证据理论无需目标先验,也无需条件概率密度,在建模上比贝叶斯概率论具备更优越的有效性与灵活性。
D-S证据理论对于“不确定性”的表达通过对由多个对象组成的集合子集来进行基本概率分配函数的分配,而不是单个对象,并对证据主体进行合并形成新的证据。
Dempster组合规则的决策是通过多传感器信息的综合而得,拥有准确、有效的特征[3]。
设多传感器系统的框架为Θ={A1,A2,...,AM},生成两个独立的证据定义,设对应的mass函数为m1和m2,则Dempster组合规则为交换律和结合律在Dempster组合规则中发挥的作用是在不受揆情度理顺序的影响下提高证据融合的便利性。
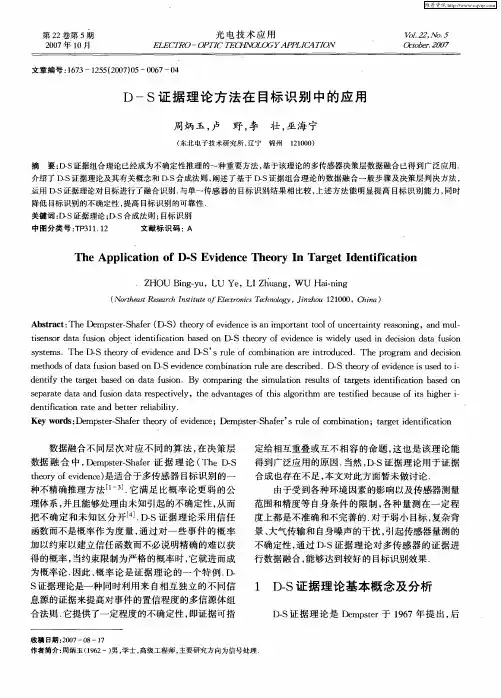
基于D-S证据理论的目标识别融合应用作者:方怡王先全李杰李俊霖徐粮周锡祥来源:《电脑知识与技术》2020年第12期摘要:基于D-S证据理论的目标识别融合系统,可以充分发挥多传感器信息的优势,提高目标识别结果的准确性。
本文结合工程实践,分析地面目标融合识别过程中经典D-S证据理论方法处理数据出现的问题,发现使用D-S证据理论对于高冲突证据融合结果准确性较低。
因此提出一种基于D-S证据理论的改进数据融合方法,将冲突因子与支持度标准偏差的相反数相乘,再与所有证据和乘积的正交相加,然后减去证据的基本概率的最大差。
如果证据的冲突越大,这种方法的优势就越明显。
如果证据中不存在冲突,则融合结果与原始D-S证据理论的项目一致。
实验的比较数据表明,改进的信息融合方法对于改进解决冲突问题必不可少,并且是有效的。
关键字:多传感器信息融合;目标识别;D-S证据理论;证据支持度;冲突证据中图分类号:TP391 文献标识码:A文章编号:1009-3044(2020)12-0190-030引言目标识别融合系统是现代科技战争指挥系统中达到高效控制与指挥的重要设备和手段,要做到正确、及时地对局势进行决策、指挥,就需要对多源实时信息进行快速合理的处理,提高指挥员对局面的感知程度和反应能力,从而提高决策质量和水平。
随着各类先进电子信息设备的广泛应用,仅依靠人工进行信息分析判断以及指挥的方法已经无法适应信息化系统的要求。
对于来自不同类型、不同精度的多源传感器数据进行快速、准确处理是目标识别融合系统使用的主要技术,因此,多传感器数据融合技术已成为现代目标识别融合系统的核心技术之一,相关领域研究人员高度重视该项技术的发展。
在多传感器目标识别融合系统中,因为不同传感器准确度存在一定差异,以及环境噪声和人为干扰等因素,造成数据融合时出现不确定性。
Yager提出取消不完全可靠性证据的正则化过程,将未知情况分配给原有识别框架,有效解决了对高冲突证据的融合问题,但对于对冲突证据的完全否定问题没有得到改善。
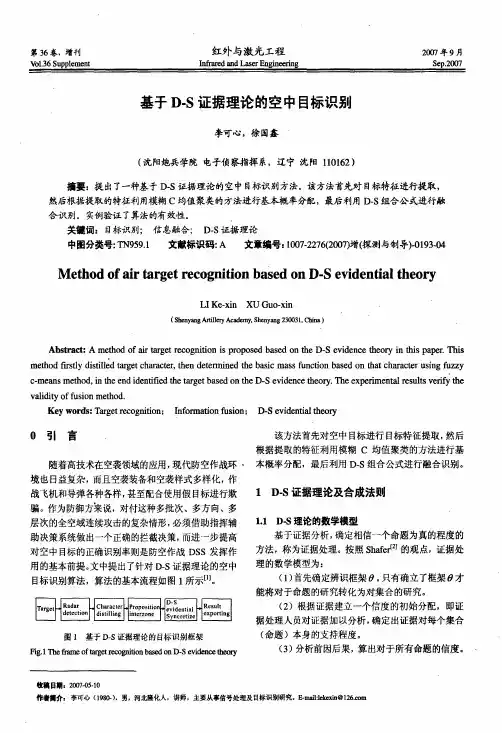
第36卷,增刊红外与激光工程2007年9月、^m.36Suppl em em I n舾r ed柚d I丑s er Engi玳:edI嚷Sep.20【y7基于D.S证据理论的空中目标识别李可心,徐国鑫(沈阳炮兵学院电子侦察指挥系,辽宁沈阳110162)摘要:提出了一种基于D—s证据理论的空中目标识别方法。
该方法首先对目标特征进行提取,然后根据提取的特征利用模糊c均值聚类的方法进行基本概率分配,最后利用D—S组合公式进行融合识别。
实例验证了算法的有效性。
关键词:目标识别;信息融合;D.S证据理论中图分类号:TN959.1文献标识码:A文章编号:1007.2276(2007)增(探测与制导).0193.04M et hod of ai r t ar get r ecogni t i on bas ed on D-S e订dent i al t he or yU K e—x i I I X U G u o.】【in(Sbcny柚g觚i IIer)‘A cadem y,Sh∞y龃g230031,a陆他)A bs t r ac t.A m em od of ai r t a昭e t re c ogI l i吐on i s pr opo s ed bas ed on m e D—S eV i(1ence t l l eo巧i n m i s paper.T嫩s m et t l od f i r st l y di s t i l l ed t a玛e t char a ct er'm en det er m i I l ed t t le bas i c m as s f u nct i o n bas ed o n t tl at cham ct er usi ng如z zy c—m ea Il s m et hod,i n tt l e end i de n姐ed t tl e t a曙e t bas ed o n t ll e D—S eV i dence m eor y.T he exper i m ent al r e sul t s V e f i母m e V al i di t)r of f us i on m em od.K e y w or ds:T a玛et r ecogI蚯on;hf o咖at i on血si on;D-S e vi de nⅡa J m eoD,O引言随着高技术在空袭领域的应用,现代防空作战环境也日益复杂,而且空袭装备和空袭样式多样化,作战飞机和导弹各种各样,甚至配合使用假目标进行欺骗。
D-S证据理论在空中目标识别中的应用现状与展望
余付平;黄益恒;沈堤;李靖宇;房瑞跃
【期刊名称】《电光与控制》
【年(卷),期】2024(31)4
【摘要】D-S证据理论作为一种多源信息融合工具,在空中目标识别领域中得到了广泛应用。
对D-S证据理论进行了概述;简要梳理了D-S证据理论在空中目标识别领域中的发展脉络,并提出应用中需要解决的三类关键问题;围绕上述问题,重点对该领域中的BPA获取、证据冲突度量、证据融合的应用现状进行综述;最后,基于空域控制视角,对D-S证据理论在该领域中的应用进行了展望。
研究可为空中目标识别领域的理论发展和工程应用提供参考。
【总页数】12页(P75-86)
【作者】余付平;黄益恒;沈堤;李靖宇;房瑞跃
【作者单位】空军工程大学空管领航学院;中国人民解放军66137部队;中国人民解放军95026部队
【正文语种】中文
【中图分类】V21
【相关文献】
1.基于模糊集和D-S证据理论的空中作战目标识别∗
2.改进的D-S证据理论在战场目标识别中的应用∗
3.D-S证据理论在舰机目标识别中的应用
4.D-S证据理论在振源目标识别中的应用
5.D-S证据理论在探地雷达目标识别中的应用
因版权原因,仅展示原文概要,查看原文内容请购买。
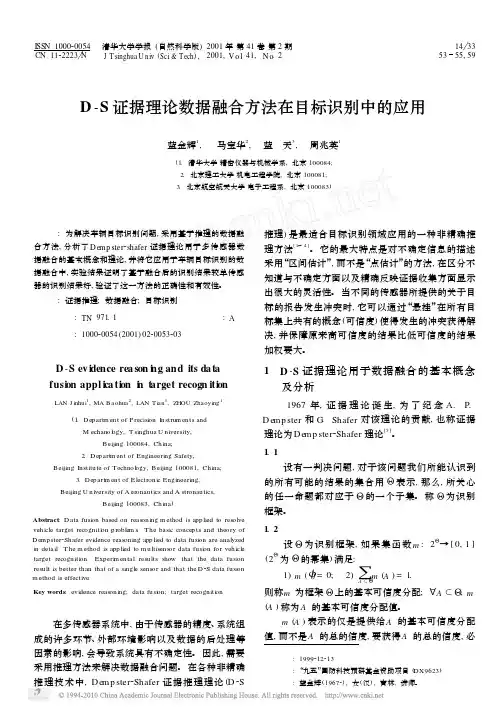
证据理论的应用举例1 D-S 证据理论1.1关于D-S 证据理论的概念D-S 理论假定有一个用大写希腊字母 Θ 表示的环境(environment ),该环境是一个具有互斥和可穷举元素的集合:Θ = { θ1 , θ2 , ⋯ , θn }术语环境在集合论中又被称之为论域(the universe of discourse )。
在D-S 理论中,习惯上把证据的信任度类似于物理对象的质量去考虑,即证据的质量(Mass )支持了一个信任。
关于质量这一术语也被称为基本概率赋值(BPA , the Basic Probability Assignment )或简称为基本赋值(Basic Assignment )。
为了避免与概率论相混淆,我们将不使用这些术语,而是简单的使用质量(Mass ) 一词。
1.2 D-S 证据理论与概率论的区别D-S 理论和概率论的基本区别是关于无知的处理。
即使在无知的情况下,概率论也必须分布一个等量的概率值。
假如你没有先验知识,那么你必须假定每一种可能性的概率值都是P, NP 1=其中,N 是可能性的总数。
事实上,这赋值为P 是在无可奈何的情况下作出的。
但是,概率论也有一种冠冕堂皇的说法,即所谓的中立原理(the principle of indifference )。
当仅仅有两种可能性存在的时候,比方说“有石油”和“没有石油”,分别用H 和⌝H 表示,那么出现应用中立原理的极端情况。
在与此相类似的情况中,即使在没有一点知识的条件下,那么也必须是P = 50 % ,因为概率论要求P(H)+P(⌝H) = 1,就是说,要么赞成H ,要么反对H ,对H 无知是不被允许的。
表1-1为证据理论与概率论的区别。
表1-1 证据理论与概率论的区别D-S理论不要求必须对无知假设H和反驳假设H赋以信任值,而是仅仅将Mass分配给你希望对其分配信任的环境的子集。
任一未被分配给具体子集的‘信任’被看成‘未表达意见’,并将其分配给环境 ,反驳一个假设的‘信任’,实际上,是对该假设的‘不信任’,但不是对该假设‘未表达意见’。