基于BP神经网络的故障诊断方法
- 格式:doc
- 大小:331.50 KB
- 文档页数:18
基于神经网络的工业设备故障诊断方法研究随着工业化的不断深入,越来越多的工业设备被广泛应用于各行各业中。
然而,随着设备的使用时间的增加,故障的发生也不可避免。
为了保证设备的正常运行,提高工业生产效率和安全性,基于神经网络的工业设备故障诊断方法成为了研究的热点。
一、神经网络在工业设备故障诊断中的应用在工业设备故障诊断中,神经网络具有很大的应用价值。
因为神经网络具有自适应性、非线性、模糊性、并行性等特点,这些特点可以帮助神经网络通过学习和训练从而得出准确的诊断结果。
在工业设备故障诊断中,神经网络通常被用作分类器,将工业设备故障分为各种不同的类型,从而提供必要的修复方案。
二、神经网络模型的构建构建一个可靠的神经网络模型是关键因素之一,这需要合适的数据集和神经网络算法。
在选择数据集时,应确保包含足够的数据,而且数据集应该包括各种不同类型的故障。
为了训练神经网络,可以采用适当的算法,如BP神经网络、RBF神经网络、SVM神经网络等,以获得更好的诊断结果。
三、具体的工业设备故障诊断案例工业设备故障诊断应用非常广泛,并且在许多行业中都应用到了。
下面,我们以电力行业为例,介绍其中一个具体的案例。
某电力厂的双机组汽轮发电机组,工作5年后出现了频繁的故障,导致发电机的正常运行一度受到了影响。
由于故障原因不明,经过多方的调查和检测,仍未找到明显的原因。
为了解决这个问题,研究人员使用神经网络方法进行了故障诊断。
首先,收集了大量的运行数据和历史故障数据,并对数据进行预处理,包括数据过滤、数据去重、数据归一化等处理。
然后,使用BP神经网络对数据进行训练,得出了准确的故障诊断结果。
经过多次实验和验证,研究人员终于找到了故障的根本原因,进而采取相应的措施,维护了发电机的正常运行。
四、神经网络方法在工业设备故障诊断中的优势与传统的故障诊断方法相比,神经网络方法具有以下优势:1. 自适应性:神经网络具有自适应学习的能力,能够快速适应不同的工业设备类型和故障类型,提供更准确的诊断结果。
密封线基于BP和RBF人工神经网络的齿轮箱故障诊断摘要本文分别阐述了BP( back propagation) 神经网络和径向基函数( radial basefunction, RBF) 神经网络的基本原理和算法,将两者分别应用于齿轮箱故障诊断与识别,建立齿轮箱的BRF 故障诊断模型,并将结果进行比较和分析.结果表明, RBF 神经网络性能优于BP 神经网络,具有较快的训练速度、较强的非线性映射能力和精度较高的故障识别能力,非常适用于齿轮箱的状态监测和故障诊断.但在具体应用中应当注意, RBF 网络的训练样本必须含有一定的噪声,以提高网络的容噪性能; 各类故障的训练样本数不能太少,否则RBF 网络的故障分类能力很差.关键字 BP神经网络 RBF神经网络故障诊断齿轮箱1引言拖拉机变速箱是整机进行减速增扭的部件,它受扭转和拉压两种载荷的综合作用,受力过程非常复杂。
因此,拖拉机的很多故障出现于变速箱中齿轮及传动轴等机械系统中。
据统计,以齿轮为代表的变速箱故障发生率占据除发动机故障以外的其他所有故障的59%-70%。
齿轮箱广泛应用于国民经济的各行各业,是各工矿企业安全生产的关键重要动力传递设备,对其进行状态监测与故障诊断有极为重要的意义。
传统的齿轮箱故障诊断一般采用振动频谱分析,且由人工实现故障分析,其诊断水平受技术人员专业知识和经验等多方面的制约,难免出现误诊、漏诊等。
但是,由于齿轮箱是一种非常复杂的传动机构,它的故障模式和特征向量之间是一种非常复杂的非线性关系,再加上齿轮箱在不同工况下的随机因素,所以专家的经验并不能解决所有的诊断问题。
而应用神经网络可以有效地避免这个问题。
神经网络的自适应、自学习和对非线性系统超强的分析能力,注定它可以在齿轮箱的故障诊断中大显身手。
故障诊断研究的目的在于寻求故障的检测、识别、定位及故障效应的评估。
故障诊断技术的应用领域越来越广泛,已经从传统的机械系统和电子系统,渗透到机电一体化系统、工业自动化系统、计算机系统等。
基于BP模糊神经网络的电气系统故障诊断方法的研究【摘要】本文阐述了BP神经网络模型在水电站电气元件故障诊断中的意义。
以专家经验为依据,结合查阅文献的手段,建立了电站电气元件的故障知识库。
与此同时,构建了基于模糊综合评判的神经网络数学模型。
最后,以一个水电站电气元件故障诊断实例论述,验证该方法的可行性。
【关键词】BP神经网络;电气元件;故障诊断水电站各电气设备组成的是一个错综复杂的系统。
而该系统的可靠性直接关系到整个机组的稳定运行,因此,保证电气系统的良好性能,对于整机长期、安全地运行具有重要的作用。
但是,由于受绝缘老化、电流过大等因素的影响,机组运行的过程中,常常会出现跳闸、继电保护器失灵、差压控制器不作用等故障。
以文献[1]为例,对某水电站10年间的运行事故进行统计。
在该段期间的运行过程中,单调速器发生的故障,竟高达20次之多,而且每次出现的故障症状与可能导致的原因之间并非明确的对应关系,存在着模糊性。
由此,故障的诊断工作异常困难,以至于许多时候,检修环节无从着手。
若事故发生在丰水期,维护的时间愈长,其经济损失也愈大。
对于电气元件的故障征兆和诱发原因之间错综复杂的关系,本文以专家经验为依据,创建了知识库,并构建了电气设备的BP神经网络故障诊断系统。
目的是为了能够准确、及时地根据机组电气设备故障特征来判断准确的故障原因。
1 电气设备故障推理知识库的构建水电站电气设备故障推理知识库,其本质是一个问题求解的知识集合,它包含着各种基本事实、规则以及其他相关信息。
库中的知识源于多名行业内经验丰富的专家,其精度的高低,是决定着系统分析能力的关键。
在本文中,推理知识库的构建(表1)主要分为两个步骤进行。
1.1 文献搜集对近60年来,100多例国内水电站电气设备及自动化元件的故障案例进行统计,并将所有案例中出现的事故征兆和故障原因进行逐一地剖析、整理。
例如,某台水轮发电机组在运行的过程中,监控系统显示电气元件事故报警,出现的故障征兆是系统有功负荷降低,通过剖析故障原因得出的结论是:反馈传感器发生了故障,则分别将其加入到库中的征兆和原因两个部分。

BP神经网络在滚动轴承故障诊断中的应用研究作者:王尉旭周豪洪朝银来源:《无线互联科技》2024年第05期摘要:反向传播神经网络(Back Propagation Neural Network ,BPNN)是一种深度学习模型,在各个领域都有重要应用。
文章以滚动轴承故障诊断为例,探讨了BP神经网络在其中的应用。
文章通过运用及优化BP神经网络,对凯斯西储大学提供的轴承故障数据加窗后进行离散傅里叶变换处理,再进行峰值特征提取,然后利用该数据进行神经网络模型的学习和预测,构建了一个能够准确预测轴承故障类型的网络模型。
该模型能够提高轴承故障诊断的效率和准确性,具有重要的实用价值。
关键词:BP神经网络;故障诊断;滚动轴承中图分类号:TP183;TP277文献标志码:A0 引言随着科技的飞速发展,人工智能技术逐渐渗透到各个领域,为人类社会带来了前所未有的变革。
作为人工智能领域的重要分支,神经网络的研究和应用备受关注。
当前数据处理领域存在诸多复杂的非线性问题,在工业领域中,滚动轴承的故障诊断就是一个典型的例子。
这些非线性问题往往很难通过传统的数据处理方法去解决,因为传统的数据处理方法无法很好地捕捉数据之间复杂的非线性关系,而神经网络技术就在其中发挥了重要的作用。
例如BP神经网络,以其强大的映射能力和自学习能力,为解决许多复杂的非线性问题提供了有效途径。
本文旨在探讨BP神经网络的技术原理和应用,通过深入剖析其基本原理和算法,揭示其内在的规律和特点,并介绍了BP神经网络的应用。
以滚动轴承故障诊断为例,本文对BP神经网络在工业领域的应用效果和优势进行了研究,为相关领域的研究和实践提供支持。
1 BP神经网络原理BP神经网络的基于反向传播算法,是一种自动调整神经网络权重的方法,通过每个神经元的输出误差调整神经网络中的权重,以达到最佳的输出结果。
与其他前馈神经网络不同,BP神经网络能够自动提取输入和输出数据之间的“合理规则”,并自适应地将学习内容记忆于网络的权值中[1]。
基于BP神经网络技术开发港口设备故障诊断专家系统摘要:针对港口设备故障诊断的复杂性,提出了将BP神经网络技术引入设备故障诊断专家系统的思想,并对基于神经网络的专家系统的原理进行探讨。
给出了一基于三层BP网的设备故障诊断专家系统的诊断过程。
关键词:神经网络;专家系统;故障诊断0 引言在港口生产作业中,保证设备的完好率和故障及时解决是非常重要的;在设备发生故障后,能第一时间诊断故障类别将加速故障排除,为生产作业争取作业时间,保证了船舶的及时装卸。
由于设备故障现象的多样性和复杂性,通过线形分析是无法确定的,我们引进BP神经网络技术设计开发一套故障诊断专家系统。
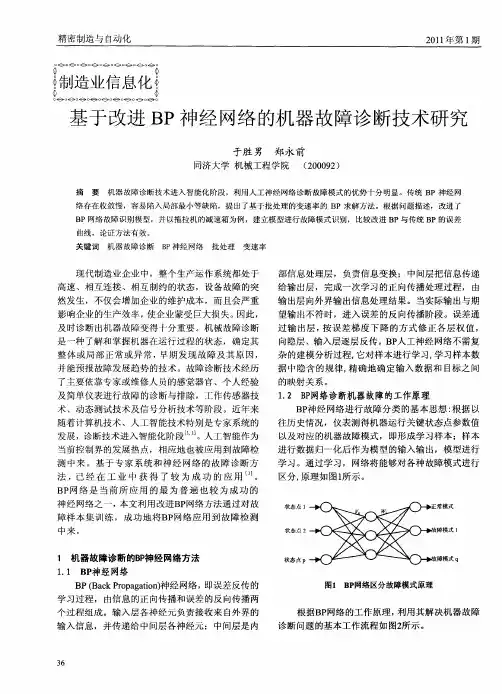
1 BP神经网络技术原理1.1 BP神经网络概述BP神经网络(Back Propagation Neural Network)是一种按误差逆向传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一,通过学习和存贮大量的输入——输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。
它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小包括输入层(input)、隐层(hide layer)和输出层(output layer)。
1.2 BP神经网络模型及算法输入层T1、T2....Tn,通过相互之间联系,计算出各自的系数值,在输出层中,在已知H1、H2......Hi-1值,通过算出的系数值,预测出Hi-Hn值。
BP神经网络诊断系统算法:在正向计算进程中, 输入信息从输入层经过隐层逐层处理, 传向输出层。
每一层神经状态只影响下一层神经状态。
BP神经网络主要用于模式识别、系统辨识、图像处理等。
1.3 运用MATLAB进行训练和预测MATLAB神经网络工具箱中包含了许多用于BP神经网络分析与设计的函数,通过MATLAB运行模拟BP算法,首先设置BP神经网络,然后利用已知的样本对网络进行训练,最后就可以利用训练好的BP神经网络对未知的样本进行预测。
基于BP神经网络的故障诊断研究故障诊断是工业生产中的重要环节,能够有效地保障生产设备的运转,减少设备的损坏和停机时间,提高工业生产效率和经济效益。
近年来,随着神经网络技术的发展和应用,基于BP神经网络的故障诊断方法受到了广泛关注和研究。
本文将从问题阐述、方法研究和应用展望三个方面来探讨基于BP神经网络的故障诊断研究。
一、问题阐述故障诊断是指在生产设备日常运作过程中,通过对设备的监测、检测和分析,及时、准确地判断设备状态,发现和分析故障根源,提出改进措施,防止和减少故障的发生和影响。
故障诊断包括多种方法和技术,如信号处理、统计分析、机器学习等。
其中,基于BP神经网络的故障诊断方法备受重视。
BP神经网络是一种基于误差逆传播算法的多层前馈网络,适合于非线性、强耦合、复杂的系统建模和预测。
在故障诊断中,BP神经网络可以通过监测信号的输入和输出,建立故障诊断模型,判断设备的健康状况和故障类型,提高故障诊断的准确性和可靠性。
然而,BP神经网络的应用也存在一些问题和挑战,如训练样本的获取和处理、网络结构的优化和选择等。
因此,基于BP神经网络的故障诊断研究面临着如何建立有效的模型、如何提高诊断准确性、如何提高网络可靠性等问题和挑战。
二、方法研究基于BP神经网络的故障诊断方法主要由三个步骤构成:数据采集与预处理、网络模型建立与训练、故障诊断与分析。
其中,数据采集与预处理是基础,网络模型建立与训练是关键,故障诊断与分析是应用。
下面将对这三个步骤进行详细介绍。
1. 数据采集与预处理数据采集是获取设备监测信号的过程,通常使用传感器和数据采集卡等设备来完成。
收集到的数据包括设备的各种信号,如电流、电压、温度、振动等。
预处理是对所采集到的数据进行滤波、降采样、归一化和特征提取等处理,目的是消除干扰和噪声、降低数据维度、提高特征有效性和区分度。
2. 网络模型建立与训练网络模型建立是指根据所采集到的数据,利用BP神经网络建立故障诊断模型。
基于BP神经网络的故障诊断方法《智能控制基础》研究生课程设计报告题目基于BP神经网络的故障诊断方法学院机械与汽车工程学院专业班级车辆工程学号************学生姓名李跃轩指导教师武晓莉完成日期2016年12月10日目录1 设计概述 (2)1.1研究对象介绍 (2)1.2设计内容及目标 (2)2 设计原理、方法及步骤 (3)2.1基于BP算法的神经网络模型 (3)2.2 神经网络信息融合故障诊断步骤 (4)3 结果及分析 (6)3.1数据仿真 (6)3.2 结果分析 (9)4 设计小结 (10)参考文献 (10)附录程序 (11)1 设计概述1.1研究对象介绍信息融合是多源信息综合处理的一项新技术,是将来自某一目标(或状态)的多源信息加以智能化合成,产生比单一信息源更精确、更完全的估计和判决。
信息融合所处理的多传感器信息具有更为复杂的形式,可以在不同的信息层次上出现。
多传感器信息融合的优点突出地表现在信息的冗余性、容错性、互补性、实时性和低成本性。
神经网络是由大量互联的处理单元连接而成,它是基于现代神经生物学以及认知科学在信息处理领域应用的研究成果。
它具有大规模并行模拟处理、连续时间动力学和网络全局作用等特点,有很强的自适应学习和非线性拟合能力,从而可以替代复杂耗时的传统算法,使信号处理过程更接近人类思维活动。
柴油机故障具有相似性,故障与征兆的关系不明确,具有较强的模糊性,故障特征相互交织,柴油机故障诊断是一个复杂的问题。
综合柴油机故障的特点以及神经网络的优势,采用基于BP神经网络的多传感器信息融合技术对柴油机机械故障进行诊断。
1.2设计内容及目标设计内容:针对传统故障诊断方法存在的诊断准确性不高的问题,提出了BP神经网络信息融合的方法,实现对柴油机的机械故障诊断。
由多个传感器采集信号,分别经过快速傅里叶变换后获得故障频域特征值,再经BP神经网络对柴油机进行故障局部诊断,能够对相应传感器的不同故障类型做出一个准确地分类,最终完成对汽轮机机械故障的准确诊断。
实验结果表明,该方法克服了单个传感器的局限性和不确定性,是一种有效的故障诊断方法。
采用方法:通过BP神经网络进行局部诊断,最终判定故障及故障类型。
基于BP神经网络多传感器信息融合,故障诊断方法是特征层状态属性融合,并利用MATLAB仿真。
2 设计原理、方法及步骤基于神经网络多传感器信息融合故障诊断方法是特征层状态属性融合,也就是特征层联合识别方法,多传感器检测系统为识别提供了比单传感器更多的有关目标(状态)的特征信息,增大了特征空间维数。
本文运用神经网络多传感器信息融合方法对机械设备运行状态进行诊断识别,是基于这样一种思想:设备运行状态与其各种征兆参数(温度、压力、电压、电流、振动信号等)之间存在着因果关系,而这种关系之复杂是难用公式表达的,由于神经网络所具有的信息分布式存储方式、大规模自适应并行处理、高度的容错能力等是其可用于模式识别的基础,特别是其学习能力、容错能力和高度的非线性映射能力对机械设备运行状态的不确定性模式识别具有独到之处。
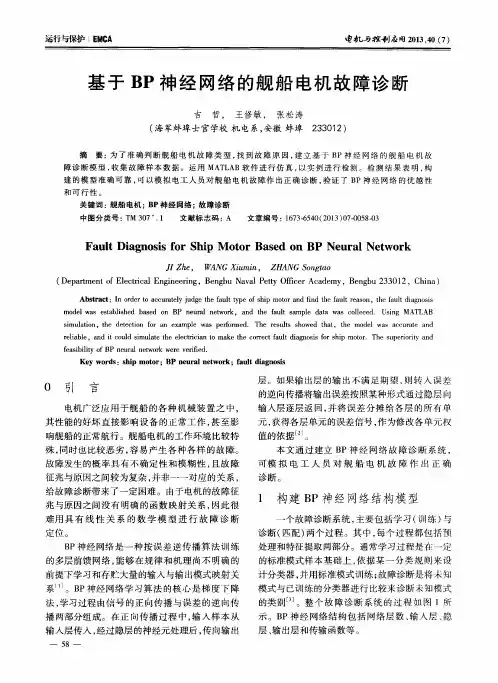
2.1基于BP算法的神经网络模型本文采用的是3层BP神经网络模型,由输入层、隐层和输出层构成,图1所示为一个典型的三层BP神经网络模型图1 一个简单的BP 神经网络模型网络的前馈意义在于每一层节点的输入仅来自前面一层节点的输出。
对于输入信号,先前向传播到隐层节点,经过激活函数后,再把隐层节点的输出信息传播到输出节点,最后得到输出结果。
(1)输入层节点(1,2,...,),i i n =其输出i O 等于输入i X ,将变量值传送到第二层。
(2)隐层节点(1,2,...,),j j p =其输入j I ,输出j O 分别为:1ωθ==+∑nj ji i j i I O (2-1)()1/[1exp()]j j j O f I I ==+-(2-2)式中,ji ω为隐层节点j 与输入层节点i 之间的权值,j θ为隐层节点j 的偏置,f 为sigmoid 函数,其表达式为:()1/[1exp()]f x x =+- (2-3)(3)输出层节点(1,2,...,),k k m =其输入k I ,输出k y 分别为:1pk kj j kj I O ωθ==+∑(2-4)()1/[1exp()]k k k y f I I ==+- (2-5)式中,kj ω为输入层节点k 与隐层节点j 之间的连接权值,k θ为输出层节点k 的偏置。
对于给定的训练样本1,2(,...,)p p pn x x x ,p 为样本数(1,2,...,)p P =,网络输出与训练目标之间的均方误差可表示为:11pP p E E p ==∑ (2-6)211()2lP pl pl l E t y -==∑(2-7)其中p 为样本数,pl t 为第p 个样本的第l 个输出单元的目标输出结果,pl y 为诊断结果第p 个样本的第l 个输出单元的网络运算结果。
BP 网络训练的过程包括网络内部的前向计算和误差的反向传播,其目的就是通过调整网络内部连接权值使网络输出误差最小。
对于多层前馈网络中输入层与隐层之间、隐层与输出层之间连接权值利用BP 算法调整。
2.2 神经网络信息融合故障诊断步骤神经网络知识表示是一种知识的隐式表示,知识表现为网络的拓扑结构和连接权值,采用神经网络技术的专家系统,由于神经网络是一种信息存储和处理统一的网络系统,因此,在采用神经网络技术的专家系统中,知识的存储与问题求解过程中的推理过程均在系统的神经网络模块中进行,是推理机和知识库的统一。
首先从已有的设备特征信号提取特征数据,经过数据预处理(归一化处理)后作为神经网络输入,从已知的故障结果提取数据作为神经网络输出,构建BP 神经网络,利用已有的特征数据和已知的故障结果数据形成的训练样本集对构建的BP 神经网络进行训练和网络自学习,使BP 神经网络的权值、阀值与已知的故障结果之间存在对应关系达到期望的故障结果输出。
当BP 神经网络训练完毕后,就可以利用训练成功的BP 神经网络进行故障诊断。
故障诊断的过程如下:1)将故障样本输入给输入层各节点,同时它也是该层神经元的输出。
2)由式(2-2)求出隐层神经元的输出,并将其作为输出层的输入。
3)从式(2-5)求得输出层神经元的输出。
4)由阈值函数判定输出层神经元的最终输出结果。
柴油机的故障诊断首先从待诊断的故障信号中提取数据并进行数据预处理,而后将待诊断故障数据输入训练成功的神经网络。
利用神经网络信息融合进行故障诊断步骤如图2所示:图2信息融合进行故障诊断步骤3 结果及分析3.1数据仿真以某种柴油机中的4个实际故障样本为例,每个故障样本有5个故障特征值,因此选取网络的输入节点为5。
将样本输入到神经网络模型中,每个输出节点代表一种故障类型,则这4种故障类型和一个正常状态共需5个输出节点与之相对应,因此网络的输出节点为5。
表3-1训练数据。
表3-1 训练数据在表3-1 训练数据中,样本序号1~6是正常状态;样本序号7~12是故障1状态;样本序号13~18是故障2状态;样本序号19~24是故障3状态;样本序号25~30是故障4状态。
表3-2是测试数据。
表3-2测试数据根据故障诊断的特点建立BP神经网络模型,网络的输入层节点、隐层节点和输出层节点个数分别为5、60和5,设置系统误差为1e-3,学习率为1,最大迭代次数为1000次,其中输入层到隐层之间的激活函数为双曲正切函数,隐层到输出层之间的激活函数设置为logsig的S型传递函数,在输出端设置的阈值为0.85,即网络输出值大于0.85的置1,小于等于0.85的置0来处理,利用MATLAB神经网络工具箱建立BP神经网络模型。
3.2 结果分析在本文中将正常状态设置为[1 0 0 0 0 ],故障1设置为[0 1 0 0 0 ],故障2设置为[0 0 1 0 0 ],故障3设置为[0 0 0 1 0 ],故障4设置为[0 0 0 0 1 ],输出阈值设置为0.85,即在输出值大于0.85即为1,否则为0。
根据输出数据的分析判断属于哪种故障,表3-3为仿真输出。
表3-3仿真输出将表3-2中“样本序号1”的5个故障特征值输给网络的输入层节点,则网络输出层节点与其对应的输出为表3-3中“样本序号1”所在行的5个输出值,其中只有y2=1.0008>0.85,其他5个输出均远小于0.85,所以,网络故障诊断的结果为故障1;表3-2中“样本序号2”的5个故障特征值输给网络的输入层节点,则网络输出层节点与其对应的输出为表3-3中“样本序号2”所在行的5个输出值,其中只有y1=1.0139>0.85,其他5个输出均远小于0.85,所以,网络故障诊断的结果为正常状态;表3-2中“样本序号3”的5个故障特征值输给网络的输入层节点,则网络输出层节点与其对应的输出为表3-3中“样本序号3”所在行的5个输出值,其中只有y4=0.9923>0.85,其他5个输出均远小于0.85,所以,网络故障诊断的结果为故障4,其他类型的故障诊断以此类推。
4 设计小结因为学习的专业是车辆工程,因此选择了对柴油机故障诊断这一研究对象。
此篇设计经过查阅文献资料,对BP神经网络的故障诊断及Matlab仿真有了一定的认识。
柴油机故障诊断是一个非常复杂的过程,其故障与征兆关系不是很明确,存在一种非线性映射关系。
BP神经网络具有良好的学习能力,利用BP 网络信息融合方法,能够在足够多的样本数目前提下网络保证良好的容错性和鲁棒性是比较好的。
所以在故障诊断的过程中,神经网络信息融合发挥其联想记忆和分布并行处理能力,不仅能够诊断出已有的故障还能对故障进行一个预测,从而满足柴油机故障断的要求。
人工神经网络信息融合为智能诊断提供了良好的方法,为自适应学习和决策高度智能化控制系统提供了强有力的基础,并具有广泛的应用潜力和发展前景。
参考文献[1]朱大奇,于盛林.基于D-S证据理论的数据融合算法及其在电路故障诊断中的应用[J].电子学报,2002, 30(2):221-223.[2] 王万良.人工智能及其应用(第3版)(附光盘)(BZ)[M]. 高等教育出版社, 2016.[3] 朱大奇,于盛林.电子电路故障诊断的神经网络数据融合算法[J].东南大学学报(自然科学版),2001,31(2):87-90.[4] 何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2000.[5] 张绪锦,谭剑波,韩江洪.基于BP神经网络的故障诊断方法[J].系统工程理论与实践,2002,22(6):61-66.[6]Y.G. Lei, Z.J. He, Y.Y. Zi, Q. Hu, Faultdiagnosis of rotating machinery based on multiple ANFIS combination with Gas[J].Mech. Syst. Signal Process.2007(21)2280–2294.[7] V.T. Tran, F. AlThobiani, A. Ball, Anapproach to fault diagnosis of reciprocating compressor valves using Teager–Kaiserenergy operator and deep belief networks[J].ExpertSyst.Appl.2014(41)4113–4122.附录程序clcclear%%输入训练数据(包括正常数据和故障数据)%%训练样本中,每一列分别代表:“温度”,“压力”,“电压”,“电流”和“振动信号”;每一行分别代表一个样本p11=[0.0000 0.0000 0.0013 0.0000 0.0000]';p12=[0.0074 0.0335 0.0015 0.0032 0.0106]';p13=[0.0043 0.0223 0.0000 0.0047 0.0053]';p14=[0.0056 0.0315 0.0012 0.0027 0.0086]';p15=[0.0063 0.0205 0.0020 0.0033 0.0066]';p16=[0.0049 0.0300 0.0018 0.0026 0.0078]'; %正常数据p21=[0.5520 0.3107 0.2581 0.3094 0.2316]';p22=[0.5452 0.2793 0.2611 0.2988 0.2036]';p23=[0.5502 0.2458 0.2717 0.3115 0.2347]';p24=[0.5406 0.2862 0.2645 0.3009 0.2145]';p25=[0.5604 0.3028 0.2835 0.3125 0.2225]';p26=[0.5525 0.3125 0.2778 0.3005 0.2164]'; % 故障1p31=[0.2462 0.1508 0.0947 0.0964 0.0999]';p32=[0.2535 0.1061 0.0968 0.0971 0.0810]';p33=[0.2665 0.0894 0.0937 0.0994 0.0908]';p34=[0.2556 0.1465 0.0988 0.1000 0.1000]';p35=[0.2628 0.1432 0.0899 0.0965 0.0899]';p36=[0.2562 0.0999 0.0900 0.0999 0.0998]'; % 故障2p41=[0.6615 0.5251 0.5195 0.4710 1.0000]';p42=[0.6738 0.4413 0.5225 0.4732 0.9667]';p43=[0.6665 0.4749 0.5255 0.4769 0.9758]';p44=[0.6689 0.4652 0.5200 0.4756 0.9899]';p45=[0.6700 0.4748 0.5235 0.4825 1.0000]';p46=[0.6623 0.4832 0.5268 0.4669 0.9887]'; %故障3p51=[1.000 1.0000 0.9812 1.0000 0.8206]';p52=[0.9797 0.9777 1.0000 0.9960 0.7759]';p53=[0.9846 0.9727 0.9847 0.9857 0.7600]';p54=[0.9800 0.9825 0.9835 0.9887 0.8000]';p55=[0.9965 0.9934 0.9862 0.9899 0.7800]';p56=[1.0000 0.9912 0.9938 0.9961 0.8014]'; %故障4p=[p11 p12 p13 p14 p15 p16 p21 p22 p23 p24 p25 p26 p31 p32 p33 p34 p35 p36 p41 p42 p43 p44 p45 p46 p51 p52 p53 p54 p55 p56];%将所有的数据:包括正常数据和异常数据放在一个数据集中,将该数据集设置为输入神经网络的特征值%%对被检测对象类别进行编码(设置目标值,即标签,用二进制类型表示)t11=[1 0 0 0 0]';t12=[1 0 0 0 0]';t13=[1 0 0 0 0]';t14=[1 0 0 0 0]';t15=[1 0 0 0 0]';t16=[1 0 0 0 0]'; % normalt21=[0 1 0 0 0]';t22=[0 1 0 0 0]';t23=[0 1 0 0 0]';t24=[0 1 0 0 0]';t25=[0 1 0 0 0]';t26=[0 1 0 0 0]'; % fault1t31=[0 0 1 0 0]';t32=[0 0 1 0 0]';t33=[0 0 1 0 0]';t34=[0 0 1 0 0]';t35=[0 0 1 0 0]';t36=[0 0 1 0 0]';% fault2t41=[0 0 0 1 0]';t42=[0 0 0 1 0]';t43=[0 0 0 1 0]';t44=[0 0 0 1 0]';t45=[0 0 0 1 0]';t46=[0 0 0 1 0]';% fault3t51=[0 0 0 0 1]';t52=[0 0 0 0 1]';t53=[0 0 0 0 1]';t54=[0 0 0 0 1]';t55=[0 0 0 0 1]';t56=[0 0 0 0 1]';% fault4t=[t11 t12 t13 t14 t15 t16 t21 t22 t23 t24 t25 t26 t31 t32 t33 t34 t35 t36 t41 t42 t43 t44 t45 t46 t51 t52 t53 t54 t55 t56];[p, s1] = mapminmax(p);%输入样本归一化归一化的范围是(-1,1),s1 记录归一化的参数net=newff(minmax(p),[60,5],{'tansig','purelin'},'trainlm');%新建BP网络,p为样本输入:p=martric(5*30) 分别表示5个传感器,30个样本% 隐层神经元个数为60,根据输出目标t确定输出层神经元个数为5,% 从输入层到隐层的激励函数为双曲正切,隐层到输出层的激励函数为线性函数,训练方法利用LM(Levenberg-Marquardt)算法进行网络参数sita={W,b}的更新%%设置网络训练参数net.trainParam.show=10; %设置数据显示刷新频率,学习次刷新一次图象net.trainParam.epochs=1000; %最大训练次数net.trainParam.goal=1e-5; % 设置训练误差net=init(net);%网络初始化[net tr]=train(net,p,t);%训练网络%%testingp1=[0.5493 0.2626 0.2659 0.3088 0.2221]';p2=[0.0031 0.0235 0.0005 0.0030 0.0045]';p3=[0.9920 0.9899 0.9979 0.9937 0.7979]';p4=[0.6704 0.4972 0.5235 0.4741 0.9791]';p5=[0.2572 0.1006 0.0958 0.0981 0.0890]';p6=[0.9800 0.9825 0.9835 0.9887 0.8000]';%测试数据pp=[ p1 p2 p3 p4 p5 p6];pp = mapminmax('apply',pp,s1);%测试样本归一化result_test=sim(net,pp)%测试样本仿真result_test( result_test>0.85)=1;result_test( result_test<=0.85)=0;disp('网络输出:')result_testpp_lab=[2 1 5 4 3 5];% 测试样本标签(正确类别)res=vec2ind(result_test)%向量值变索引值strr = cell(1,6);for i=1:6if res(i) == pp_lab(i)strr{i} = '正确';elsestrr{i} = '错误';endenddiag = {'正常','故障1', '故障2', '故障3', '故障4' };disp('诊断结果:')fprintf(' 样本序号实际类别判断类别正/误故障类型 \n');for i =1:6fprintf(' %d %d %d %s %s\n',... i, pp_lab(i), res(i), strr{i}, diag{res(i)});endfigureplot(pp_lab,'-g*');hold onplot(res,'-ro')legend('期望类型','预测数出类型')xlabel('样本')ylabel('类型') title('故障类型')。