变电站巡检机器人GPS导航系统设计
- 格式:pdf
- 大小:733.56 KB
- 文档页数:3
变电站智能巡检机器人导航定位技术设计*孙 振,胡金磊,罗建军,黎阳羊(广东电网有限责任公司清远供电局,广东 清远 511515)摘 要:智能巡检机器人性能对于提高变电站电气设备安全运行具有重要作用。
本文设计了变电站智能巡检机器人导航定位总体机构,以定点监测和轨迹行进作为导航定位方案,轨迹行进采用一种新颖的路径导航算法,通过图像处理和模式识别判断机器人前进方位。
最后通过模拟机器人进行实验,运行结果表明本导航方法具有路径识别速度快,判别精确、灵活可移植的特点。
关键词:变电站;智能巡检机器人;导航定位;路径导航算法中图分类号:TP242.6 文献标识码:A 文章编号:1003-7241(2018)11-0082-04Design of Navigation and Positioning Technology for Intelligent Inspection Robot in SubstationSUN Zhen, HU Jin-lei, LUO Jian-jun, LI Yang-yang( Qingyuan Power Supply Bureau of Guangdong Power Grid Corporation, Qingyuan 511515 China ) Abstract: The performance of intelligent inspection robot plays an important role in improving the safe operation of electrical equipment in substations. In this paper, the general positioning and navigation mechanism of substation intelligent inspection robot is designed. Fixed-point monitoring and trajectory tracking are used as a navigation and location plan.A novel path navigation algorithm is used to track the robot's forward position through image processing and patternrecognition. Finally, the simulation robot experiment is carried out. The results show that the navigation method has the characteristics of fast track recognition, accurate discrimination and flexibility and portability.Key words: substation; intelligent inspection robot; navigation and positioning; path navigation algorithm1 引言为了保证变电站安全生产和运行,必须定期对现场电气设备进行巡视检测,及时进行消缺和检修[1-2]。
变电站智能巡检机器人视觉导航系统设计随着社会经济的不断发展,电力系统已经成为现代社会的重要基础设施之一。
而变电站作为电力系统的重要组成部分,对电力系统的运行和安全具有至关重要的作用。
由于变电站设备众多、运行环境复杂,常规的人工巡检方式存在着工作量大、效率低、安全风险高等问题。
设计一种智能巡检机器人是解决这些问题的重要途径之一。
本文将介绍一种变电站智能巡检机器人的视觉导航系统设计,以提高巡检效率和安全性。
一、智能巡检机器人视觉导航系统概述智能巡检机器人视觉导航系统是指通过图像识别和导航技术,使机器人能够在变电站的复杂环境中准确定位、规避障碍、实现自主巡检的一种系统。
该系统的核心是利用机器视觉技术对变电站环境进行感知和识别,结合导航算法实现智能路径规划和定位,从而达到智能巡检的目的。
1. 传感器系统:智能巡检机器人需要搭载包括摄像头、激光雷达、红外传感器等多种传感器,以感知和获取周围环境的信息。
摄像头用于采集实时视频图像,激光雷达用于地面障碍物检测,红外传感器用于测量环境温度等。
2. 图像处理与识别算法:通过对传感器获取的图像进行处理和分析,实现对变电站设备和环境的识别和理解。
基于深度学习的目标检测和识别算法可以实现对设备、障碍物和人员等进行准确识别。
3. 定位与导航算法:利用传感器获取的数据,结合SLAM(Simultaneous Localization and Mapping)算法实现机器人的定位和地图构建。
通过路径规划和避障算法,实现智能路径规划和自主导航,从而完成变电站的巡检任务。
4. 人机交互界面:设计人机交互界面,使操作人员能够实时监控机器人的位置、巡检状态和设备情况,同时能够远程控制机器人完成特定任务。
5. 数据通信与存储系统:建立稳定的数据通信网络,实现机器人与监控中心之间的数据传输和交互;同时设计合理的数据存储系统,实现对巡检数据的存储和管理。
1. 目标检测和识别技术:基于卷积神经网络(CNN)的目标检测算法,能够对变电站中的设备、障碍物和人员等进行准确识别。
变电站智能巡检机器人视觉导航系统设计【摘要】本文主要介绍了变电站智能巡检机器人视觉导航系统设计的相关内容。
在首先介绍了背景信息,即变电站巡检的重要性和现有问题。
接着阐述了研究意义,即利用智能机器人和视觉导航系统可以提高巡检效率和减少人工风险。
在分别讨论了系统架构设计、传感器选择与布局、路径规划算法设计、图像处理技术应用以及实验验证与结果分析。
最后在结论部分总结了设计优势,包括提高效率、降低成本等,并展望了未来的发展方向,如智能化升级、更多应用场景等。
通过本文的研究,可以为变电站巡检领域的智能化发展提供一定的参考和借鉴。
【关键词】变电站、智能巡检、机器人、视觉导航、系统设计、架构、传感器、路径规划、算法、图像处理、实验验证、结果分析、设计优势、未来展望1. 引言1.1 背景介绍变电站作为电力系统的重要组成部分,起着输送、转换和分配电能的关键作用。
由于变电站设备众多、复杂,存在着一定的安全隐患和运维难题。
为了提高变电站设备的安全性和运行效率,智能巡检机器人成为了一种重要的解决方案。
智能巡检机器人能够代替人工对变电站设备进行巡查,不仅能够提高工作效率,减少人力成本,还能够减少人员因接触高压设备而面临的安全风险。
目前市面上的智能巡检机器人多数还存在着一些问题,例如巡检路径不智能化、视觉导航精度低下等。
本文针对变电站智能巡检机器人的视觉导航系统展开研究,旨在设计一套高效、智能的系统,以提高智能巡检机器人的导航精度和工作效率。
通过本文的研究,可以为变电站智能巡检机器人的研发和推广提供参考和借鉴。
1.2 研究意义变电站智能巡检机器人是一种集智能识别、自主导航、实时监测等功能于一体的机器人装置,能够有效地代替人工巡检,提高巡检效率,减少人力成本,降低安全风险。
随着变电站的数量和规模不断增加,传统的人工巡检方式已经无法满足实际需求,因此发展智能巡检机器人已成为当今的热点研究领域。
智能巡检机器人的视觉导航系统是其中至关重要的一部分,通过视觉传感器实现对周围环境的感知和识别,并结合路径规划算法实现自主导航,使机器人能够准确、高效地完成巡检任务。
变电站智能巡检机器人视觉导航系统设计随着科技的不断发展,智能机器人在许多领域都展现出了强大的应用潜力。
变电站智能巡检机器人的视觉导航系统设计是一个备受关注的领域。
在变电站巡检工作中,传统的人工巡检方式往往效率低下、安全风险高,而引入智能机器人可以有效提高巡检效率,降低巡检成本,减少人身安全风险。
设计一套适用于变电站智能巡检机器人的视觉导航系统显得尤为重要。
一、机器人视觉导航系统设计的概览1.1 智能巡检机器人的作用(1)提高巡检效率:相比传统的人工巡检方式,智能巡检机器人可以实现全天候的巡检,无需人工干预,提高了巡检频次和覆盖范围。
(2)降低巡检成本:智能巡检机器人的一次性投入成本虽然较高,但长期运行下来,其维护成本和人工成本均远低于传统的人工巡检。
(3)降低人身安全风险:变电站的工作环境复杂、危险,采用智能机器人进行巡检可以有效降低人员的安全风险。
1.2 视觉导航系统的意义视觉导航系统是智能巡检机器人的核心部件之一,其作用主要体现在以下几个方面:(1)实现精准定位:通过视觉导航系统,智能机器人能够在变电站环境中实现精准的定位,准确识别巡检路径和设备位置。
(2)实现避障导航:通过视觉导航系统,智能机器人可以实现避开障碍物、自主规避危险区域的导航功能,保证机器人的安全运行。
(3)提高巡检效率:视觉导航系统的精准定位功能可以有效提高巡检效率,节省时间成本。
1.3 设计要求与挑战在设计变电站智能巡检机器人的视觉导航系统时,需要考虑到变电站环境的复杂性和多变性,以及对巡检效率和机器人安全性的要求。
设计中需要解决以下几个关键问题:(1)环境适应性:变电站环境包括室内、室外、昼夜变化大等多种情况,视觉导航系统需要具备一定的环境适应性。
(3)避障导航:变电站设备众多、复杂,需要视觉导航系统能够实现对障碍物的自主识别和规避。
2.1 环境感知技术环境感知技术是智能巡检机器人视觉导航系统设计的首要技术。
通过环境感知技术,智能巡检机器人可以实现对变电站环境的感知、识别和理解,包括对障碍物、设备位置、光照情况等的感知。
变电站智能巡检机器人视觉导航系统设计随着社会的不断发展,电力行业的需求也在不断增加。
而作为电力系统的重要组成部分的变电站,其安全稳定运行显得尤为重要。
传统的变电站巡检方式存在着人力成本高、周期长、安全风险大等问题,因此变电站智能巡检机器人成为了电力行业的热门关注点之一。
而在智能巡检机器人中,视觉导航系统的设计与实现尤为关键。
本文将对变电站智能巡检机器人视觉导航系统进行详细设计,以期为电力行业提供更加高效、安全的智能巡检解决方案。
一、背景介绍二、设计原则1.精准性:视觉导航系统需要具备较高的精准性,以确保机器人能够精确识别变电站设备及其周围环境,从而实现精准导航路径规划。
2.实时性:系统需要能够及时处理环境变化带来的信息,以保证机器人能够及时做出相应的调整。
3.稳定性:系统需要能够稳定地运行在不同的变电站环境中,且不受光线、温度等因素的影响。
4.人性化:系统需要具备较高的人性化设计,操作简便,能够方便工程人员进行维护与管理。
三、系统架构设计变电站智能巡检机器人视觉导航系统主要包括硬件系统和软件系统两部分。
1.硬件系统硬件系统主要包括摄像头、传感器、主控板等部件。
摄像头用于捕捉变电站环境的图像信息,传感器用于获取机器人在空间位置的数据,主控板用于对信息进行处理与交互。
软件系统主要包括图像处理算法、导航路径规划算法、环境感知算法等。
图像处理算法用于对捕捉的图像信息进行处理与识别,导航路径规划算法用于根据环境信息进行路径规划,环境感知算法用于对机器人周围环境进行感知与响应。
四、系统实现在设计完系统架构后,需要根据实际情况进行系统的实现。
具体工作包括:1.硬件系统的选型与搭建:根据需求选型合适的摄像头、传感器、主控板等硬件部件,并进行搭建与调试。
2.软件系统的编写与优化:根据系统需求编写图像处理算法、导航路径规划算法和环境感知算法,并进行优化。
3.系统整合与测试:将硬件系统与软件系统进行整合,进行系统的测试与调试,确保系统能够稳定、高效地运行。
巡检机器人导航系统研究与设计摘要:智能检测机器人携带红外热像、CCD相机和一流检测装置,对变电站内外电气设备进行远程检测。
出现金器发热、悬挂国外电线、设备异常振动等现象时,应通过无线信号及时发出报警或进行故障排除。
巡检机器人设计的关键是导航定位系统,即使用具有图像处理、模式识别和人工智能等功能的探测器,首先确定参观路径和方向,然后检测位置、温度、机械振动、图像等的变化。
从目标对象识别缺陷和故障。
关键词:巡检机器人;导航系统研究;设计引言随着社会的不断发展与进步,巡检机器人已经在各种环境下被普遍使用。
目前,电力巡检机器人和无人机巡检机器人是市面上最常见的两类巡检机器人。
自动导航技术通过巡检机器人的传感器对未知环境进行感知,并结合已知环境信息对其进行相应控制,完成巡检作业任务。
巡检机器人如何实现安全到达指定位置,且在行驶过程中快速避开障碍物是研究的重点。
巡检机器人常用的导航方法有基于卫星、机器视觉、激光雷达、惯性导航等的方法,可以单独使用或结合使用。
1总体结构对于相关机器人,在实际设计工作中,为了更好地构建视觉导航系统,需要遵循科学工作原理,全面提高整体设计工作的效率。
在实际设计工作中,应合理创建移动式起重运动控制系统子系统,合理集成PC104主板结构和PMAC2A-104运动控制板以及相关电机设备的阅读器设备,便于严格控制运动和行为在机器人实际应用过程中,能够收集各种数据信息,合理利用超声波技术、激光雷达技术、GPS技术等,以便利合理的路线规划、检验等。
2功能要求智能搜索表单应具备的功能:(1)导航:跟踪预定义的轨迹,例如通过设置红外摄像机和可见光开关、高通电机,实现设备的最佳角度和清晰度。
(2)图像处理:红外传感器、可见CCD和录制设备,如红外传感器。
红外传感器检测设备温度误差,对设备体和金属连接处的热成像功能进行成像,以确定温度是否异常。
可见光CCD撷取影像以检查电气设备的外观,包括突出异常、位移等,记录一次能源、断路器、滑块开口位置的当前位置,自动读取各种输出值、油田等,并发出警告。
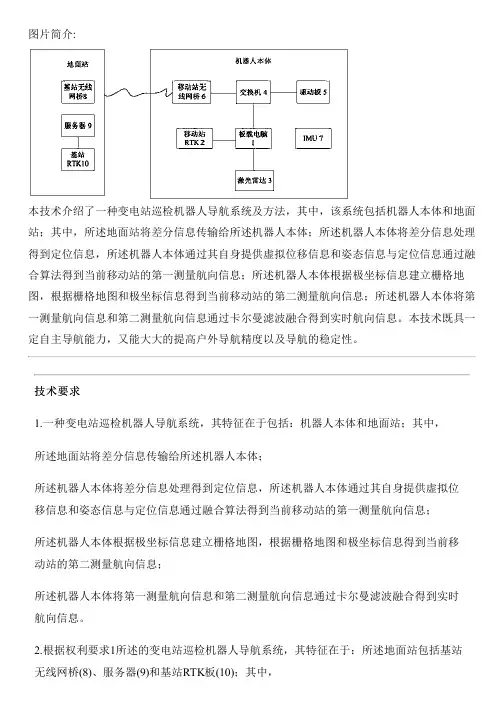
图片简介:本技术介绍了一种变电站巡检机器人导航系统及方法,其中,该系统包括机器人本体和地面站;其中,所述地面站将差分信息传输给所述机器人本体;所述机器人本体将差分信息处理得到定位信息,所述机器人本体通过其自身提供虚拟位移信息和姿态信息与定位信息通过融合算法得到当前移动站的第一测量航向信息;所述机器人本体根据极坐标信息建立栅格地图,根据栅格地图和极坐标信息得到当前移动站的第二测量航向信息;所述机器人本体将第一测量航向信息和第二测量航向信息通过卡尔曼滤波融合得到实时航向信息。
本技术既具一定自主导航能力,又能大大的提高户外导航精度以及导航的稳定性。
技术要求1.一种变电站巡检机器人导航系统,其特征在于包括:机器人本体和地面站;其中,所述地面站将差分信息传输给所述机器人本体;所述机器人本体将差分信息处理得到定位信息,所述机器人本体通过其自身提供虚拟位移信息和姿态信息与定位信息通过融合算法得到当前移动站的第一测量航向信息;所述机器人本体根据极坐标信息建立栅格地图,根据栅格地图和极坐标信息得到当前移动站的第二测量航向信息;所述机器人本体将第一测量航向信息和第二测量航向信息通过卡尔曼滤波融合得到实时航向信息。
2.根据权利要求1所述的变电站巡检机器人导航系统,其特征在于:所述地面站包括基站无线网桥(8)、服务器(9)和基站RTK板(10);其中,所述基站RTK板(10)所产生的差分信息通过所述服务器(9)传输给所述基站无线网桥(8),所述基站无线网桥(8)将差分信息传输给所述机器人本体。
3.根据权利要求2所述的变电站巡检机器人导航系统,其特征在于:所述基站无线网桥(8)通过网线与所述服务器(9)相连,所述基站RTK板(10)通过USB转串口与所述服务器(9)相连。
4.根据权利要求2所述的变电站巡检机器人导航系统,其特征在于:所述机器人本体包括板载电脑(1)、移动站RTK板卡(2)、激光雷达(3)、交换机(4)、驱动板(5)、移动站无线网桥(6)和IMU(7);其中,所述移动站无线网桥(6)接收差分信息,并将差分信息通过交换机(4)传输给所述板载电脑(1),所述板载电脑(1)将差分信息写入所述移动站RTK板卡(2),所述移动站RTK板卡(2)根据差分信息处理得到定位信息,并将定位信息传输给所述板载电脑(1);所述驱动板(5)为所述板载电脑(1)提供虚拟位移信息;所述IMU(7)为所述板载电脑(1)提供姿态信息;所述板载电脑(1)将虚拟位移信息、姿态信息与定位信息通过融合算法得到当前移动站的第一测量航向信息;所述板载电脑(1)采集激光雷达(3)的极坐标信息,根据极坐标信息建立栅格地图,根据栅格地图和极坐标信息得到当前移动站的第二测量航向信息;所述板载电脑(1)将第一测量航向信息和第二测量航向信息通过卡尔曼滤波融合得到实时航向信息。
变电站智能巡检机器人视觉导航系统设计随着现代化建设的不断推进,电力行业也在不断发展和完善,其中变电站设施的安全运行对于保障电网稳定运行至关重要。
而变电站智能巡检机器人成为了目前变电站巡检的重要手段之一。
在对变电站智能巡检机器人进行改良和提升时,视觉导航系统的设计是其中一个关键因素。
一、视觉导航系统的作用视觉导航系统是机器人智能巡检的重要组成部分,主要作用是为机器人提供可靠的导航信息。
视觉导航系统包含了从机器人感知到的各种信号、图像数据中提取有用信息的过程, 如特征提取、目标检测等,进而利用这些信息进行场景分析、环境感知和控制决策等。
通过视觉导航系统设计,智能巡检机器人能够具有较好的自主移动和定位能力,更加准确地完成变电站设施的巡检工作。
1、图像采集设备图像采集设备是视觉导航系统的基础,其质量和稳定性直接影响着后续环节的处理效果。
当前,机器人用于巡检变电站的图像采集通常采用高清摄像头。
而考虑到外部光照、相机遮挡等因素,一台摄像头是远远不够的,智能巡检机器人需要配备多台摄像头,分别安装在机器人不同的部位,以保证巡检的全面性和效率。
2、图像预处理在进行后续信息处理前,机器人拍摄的图像需要经过图像预处理的过程。
常用的预处理方法有图像去噪、增强对比度、图像校正和图像分割等。
这些预处理能够对图像进行逐步优化,增加图像中有用信息的比重,为后续的信息提取创造更好的条件。
3、特征提取特征提取是图像处理的核心内容之一,其目标在于从机器人所拍摄的图像中,提取出能够代表具有识别意义的特征。
根据特征提取的不同类型,可以分为基于颜色、纹理和形状三类。
机器人所提取的特征将会被作为机器人进行环境感知和控制决策的重要信息。
4、目标检测目标检测是针对特定目标,背景复杂的情形下,从图片或视频中自动检测出目标位置和取得相应的信息。
对于智能巡检机器人而言,目标检测是一项非常关键的技术。
通过学习已知的正样本,将其训练成一个分类器,当接收到新的图像时就可以利用分类器检测出其中的关键目标特征,进而完成巡检任务。
变电站智能巡检机器人视觉导航系统设计随着科技的不断发展,智能巡检机器人已经成为了变电站巡检的一种新方式。
相比传统的人工巡检,智能巡检机器人可以更快速、更精准地完成巡检任务,并且可以避免人为因素的影响,从而提高了变电站巡检的效率和安全性。
而智能巡检机器人视觉导航系统作为其中的一个重要部分,对于机器人的行动和导航起着至关重要的作用。
本文将围绕变电站智能巡检机器人视觉导航系统的设计进行探讨。
一、视觉导航系统的作用在智能巡检机器人中,视觉导航系统是一种重要的导航方式。
它通过摄像头和图像识别技术,可以让机器人识别周围的环境,并根据环境中的地标进行导航。
通过视觉导航系统,机器人可以实现自主导航,避开障碍物,到达指定的巡检点,并完成巡检任务。
视觉导航系统的设计是智能巡检机器人的核心之一。
二、基本原理视觉导航系统的基本原理是通过摄像头捕捉周围环境的图像,然后通过图像处理和识别技术,识别出环境中的地标和障碍物,从而实现机器人的导航和避障。
在变电站的巡检中,地标可以是变电站的设备、柱子等,而障碍物可以是其他机器设备或者人员。
视觉导航系统需要能够对这些地标和障碍物进行准确的识别和判断,并且根据识别的结果进行相应的导航和避障动作。
三、系统组成视觉导航系统通常包括以下几个部分:1. 摄像头:摄像头是视觉导航系统的“眼睛”,它可以拍摄周围环境的图像,然后传输给机器人的主控制系统进行图像处理和识别。
2. 图像处理和识别模块:这一模块使用图像处理和机器学习技术,对摄像头拍摄的图像进行处理和识别,识别出环境中的地标和障碍物。
这需要设计相关的算法和模型,以实现对地标和障碍物的准确识别和判断。
3. 导航模块:导航模块根据图像处理和识别的结果,制定机器人的导航路线,并控制机器人的行动,使其能够自主导航到达指定的巡检点。
导航模块通常包括路径规划算法、运动控制系统等。
4. 避障模块:避障模块根据图像处理和识别的结果,监测周围的障碍物,并且通过控制机器人的行动,使其能够避开障碍物,确保机器人的行动安全。
变电站巡检机器人应用技术及实施要点摘要:变电站自动化巡检机器人能够对各种恶劣环境下的变电设备进行巡视,并能及时发现故障位置并向检修站报告。
目前,在发电厂及变电站运行与维护专业教学当中对该技术的应用还需要更深入地探讨和研究,通过提高机器人的巡视质量,从而使变电站工作的稳定性得以提升,才能保障电力系统可以高效运行。
关键词:变电站;巡检机器人;应用技术;实施要点一、变电站巡检机器人的应用技术(一)变电站巡检机器人运用的导航技术1.视觉导航技术的运用视觉导航技术要求通过移动摄像机来获取相应的影像资料,并能对变电站的设备进行有效的监测与识别,而可视化的导航技术也能更好地对信息、资料进行采集,使其监测工作更加可行、高效。
然而,由于视觉导航技术造价高,要对大量的技术图像进行处理,这与环境因素密切相关,因此必须根据周围的环境特征进行优化和改进,同时也需要其它技术的配合,才能使其的价值达到最大化。
所以该项技术在运用上是较少的。
2.SLAM导航技术的应用SLAM技术已被广泛地用于军事领域,并在实际中得到了良好的应用。
这对巡检机器人的使用有很大的帮助,对提高巡检机器人的精度有很大的作用。
但SLAM技术需要高精度的电子地图,而且成本高,因此,工程技术人员必须综合考虑实际情况,寻找出一种合理、有效的解决方案。
3.GPS定位系统的应用GPS导航是当前应用最广泛的一种技术,GPS技术在变电站的巡检机器人运动轨迹中可以将技术有效地分解,这就增加了巡逻机器人的灵活性。
但是在控制过程中精度受信号的影响很大,精度低。
4.激光反射导航技术的应用在使用激光反射导航系统的过程中,工程师需要用到激光扫描装置,然后扫描巡逻路线,并且精确地计算出目标与基站之间的距离,最后再进行导航和定位。
虽然激光反射导航技术有分辨率高等诸多的优点,但同时也会受周围环境的影响,这项技术在运用时需要注意环境因素要点。
5.磁轨导航技术的应用在早期的变电站建设中,磁轨导航技术是一种常见的方式,这种技术精度高,技术成熟,但其技术路线单一,这对技术的灵活性和有效性都有产生了很大的局限性,会影响到磁轨的精度,也会受到信号影响。
变电站智能巡检机器人视觉导航系统设计摘要随着社会的不断发展,电力系统作为现代工业的重要组成部分,对供电可靠性和安全性提出了更高的要求。
变电站是电力系统中的重要组成部分,为确保其正常运行和及时发现问题,智能巡检机器人成为一种创新的解决方案。
本文将重点介绍变电站智能巡检机器人的视觉导航系统设计,以提高巡检效率和准确性。
1. 引言随着科技的迅猛发展,机器人技术逐渐应用于电力系统领域。
传统的变电站巡检方式存在效率低、人力成本高等问题,而智能巡检机器人能够通过视觉导航系统实现自主巡检,提高巡检效率,降低人力成本。
2. 视觉导航系统概述2.1 视觉传感器视觉导航系统的核心是视觉传感器,包括摄像头、激光雷达等。
摄像头用于实时捕捉环境图像,激光雷达则可获取精确的距离和深度信息,两者协同工作,为机器人提供全面的感知数据。
2.2 视觉算法视觉算法对图像数据进行处理和分析,实现机器人对环境的理解和定位。
常用的算法包括SLAM(Simultaneous Localization and Mapping)算法,通过地图构建和自身定位,使机器人能够在未知环境中实现自主导航。
3. 变电站智能巡检机器人设计3.1 机器人结构智能巡检机器人的结构设计应考虑到变电站环境的复杂性,包括越障能力、防水防尘设计等。
机器人的底盘应具备足够的稳定性,以适应不同地形。
3.2 视觉导航硬件集成将视觉传感器集成到机器人上,确保其正常工作。
采用高性能的图像处理单元,以满足实时图像处理的需求。
激光雷达的安装位置和角度应经过精心设计,最大程度地提高测量精度。
4. 视觉导航系统工作流程4.1 数据采集机器人通过搭载的摄像头和激光雷达实时采集变电站环境的数据,包括图像、深度信息等。
4.2 环境建模利用SLAM算法对采集到的数据进行处理,建立变电站环境的三维模型,同时实现机器人在环境中的定位。
4.3 路径规划基于建立的环境模型,机器人通过路径规划算法确定最优巡检路径,确保覆盖所有关键区域。
变电站智能巡检机器人视觉导航系统设计随着科技的不断发展,人工智能和机器人技术日益成熟,智能化设备已经广泛应用于各个行业。
在变电站的巡检工作中,智能巡检机器人的应用已经成为一种趋势,可以提高工作效率,减少安全隐患,保障电网的稳定运行。
本文将针对变电站智能巡检机器人的视觉导航系统设计进行详细探讨。
一、系统需求分析1.1 巡检需求变电站是电力系统中一个重要的组成部分,其设备繁多,涉及到电力变压器、隔离开关、电容器、断路器等设备的运行状态需要定期巡检,以保障电网运行的安全性和稳定性。
传统的巡检工作主要依靠人工,存在工作效率低、安全风险高的问题。
1.2 视觉导航需求智能巡检机器人需要具备视觉导航能力,能够自主地在变电站内部进行巡检,并且能够通过视觉识别设备的运行状态,及时发现故障隐患。
1.3 智能化需求巡检机器人需要能够根据巡检过程中获取的数据,进行智能分析和判断,及时发现设备运行异常并给出相应的处理措施。
二、系统设计方案2.1 视觉导航系统为了实现巡检机器人的自主导航能力,需要设计一个视觉导航系统。
该系统以摄像头为传感器,通过对环境的实时观测和分析,实现机器人在变电站内部的自主导航。
在导航过程中,机器人可以通过识别设备周围的地标和标识来确定自己的位置,进而制定路径规划进行巡检。
视觉导航系统需要具备实时性和精准性,能够在复杂的环境中实现机器人的精确定位和路径规划。
也需要具备一定的抗干扰能力,能够应对变电站环境中的各种光照、阴影和遮挡情况。
2.2 设备状态识别系统为了实现对设备状态的智能识别,需要设计一个设备状态识别系统。
该系统可以通过图像识别技术,对变电站内部的设备进行实时监测和分析,判断设备的运行状态是否正常。
在巡检过程中,当机器人发现设备异常时,通过设备状态识别系统可以及时发出报警并给出相应的处理建议。
设备状态识别系统需要具备高精度的图像识别能力,能够有效地识别不同类型的设备并判断其运行状态。
同时也需要具备快速反应能力,能够在第一时间对设备异常进行检测和分析。
变电站巡检机器人GPS导航系统设计
张彩友;冯华;付崇光;肖鹏
【期刊名称】《微计算机信息》
【年(卷),期】2010(026)029
【摘要】针对变电站巡检机器人磁轨迹导航的不足,将高精度差分GPS导航作为磁轨迹导航的替代导航方式,对导航系统的组成结构和工作原理进行了论述,并以AS-RF机器人平台为基础详细介绍了导航控制系统各软件模块的实现过程,为巡检机器人GPS导航系统的进一步开发应用做好了准备.
【总页数】3页(P166-168)
【作者】张彩友;冯华;付崇光;肖鹏
【作者单位】314033,浙江省嘉兴市,浙江省电力公司嘉兴电力局;314033,浙江省嘉兴市,浙江省电力公司嘉兴电力局;250002,济南,山东电力研究院国家电网电力机器人技术实验室;250002,济南,山东电力研究院国家电网电力机器人技术实验室
【正文语种】中文
【中图分类】TP242.3
【相关文献】
1.全向四驱变电站巡检机器人运动控制系统设计 [J], 李荣; 栾贻青; 王海鹏; 李建祥; 周岳; 许玮; 黄锐
2.一种可升降式变电站室内巡检机器人控制系统设计 [J], 姚楚阳;刘爽
3.变电站室内柔索驱动巡检机器人系统设计与运动学分析 [J], 邬蓉蓉;黎大健;覃剑;兰依
4.变电站智能巡检化机器人路径规划设计 [J], 宗玺
5.变电站室外巡检机器人可靠性能检验平台设计与研究 [J], 李嘉;陈新美
因版权原因,仅展示原文概要,查看原文内容请购买。