ARM7 lpc2131开发板原理图
- 格式:doc
- 大小:732.00 KB
- 文档页数:1

基于LPC2131的IARARM的第一个实例:LED闪烁
基于LPC2131 的IAR ARM 的第一个实例:LED 闪烁
IARARM的资料看了两天,一直没有动手去实践写程序下载到开发板上。
先说一下我的开发环境:
IARARM:v530
开发板用的是ZLG的LPC2131开发板
下载器用的J-LINKV8
这个是我的第一个程序,都不是自己写的,东一块,西一块的在其他人写的
程序里面挖过来的。
首先我们在桌面上建立一个文件夹:1_LED。
这里就是我们程序存放的地方。
IARARM做的确实很好,差不多对于没有IC都有对应的例程。
我们在IARARM安装目录下
IARSystemsEmbeddedWorkbench5.4Evaluationarmexample sNXPLPC213x里面能找到一个实例。
我们将里面的config文件夹拷贝到我们刚新建的文件夹里面。
然后我又在examplesLPC2103下找到lpc2xxx_cstartup.s拷贝到1_LED中。
IARARM如何建立工程我就不说了,这方面的资料太多了。
随便在网上都可
以看到。
我们在建立一个main.c的主文件。
我将ZLG光盘中的LED灯的程序拷贝到文件夹中。
#include将包含的头文件替换成这样。
大家要注意这个格式,#include写成这样是不行的。
还将uint32替换成unsignedint因为这里我们没有单独的定义。

EasyARM2131开发套件功能介绍定位选用LPC213x系列ARM开发产品的工程师;组建嵌入式系统教学与开发实验室;有购买能力的个人。
概述EasyARM2131开发板是广州周立功公司设计的EasyARM系列开发套件之一,采用了PHILIPS公司基于ARM7TDMI-S 核、单电源供电、LQFP64封装的LPC2131,具有JTAG仿真调试、ISP编程等功能。
开发板上提供了一些键盘、LED、蜂鸣器等常用功能部件,还具有RS232接口电路、I2C存储器电路。
另外,用户也可以更换兼容的CPU进行仿真调试,如LPC2132、LPC2138、LPC2142等。
灵活的跳线组合(开发板内使用的所有I/O均可断开连接),还有用户I/O接口,极大地方便了用户进行32位ARM嵌入式系统的开发实验。
参考照片EasyARM2131实验板功能特点完全自主设计的软硬件、拥有自主版权的JTAG仿真技术;支持ADS1.2集成开发环境及其PHILIPS所有型号ARM微控制器的仿真与开发;采用“主板+CPU PACK适配器+SD卡适配器(标准配置)+多种可选配置适配器” 的形式构成EasyARM2131开发套件,标准配置的CPU PACK主芯片为LPC2131FBD;板上的功能部件与CPU之间,可以使用跳线器选择连接;全面支持9种型号的64 PIN小管脚ARM7微控制器:-LPC213x(LPC2131/2132/2134/2136/2138)-内置USB接口的LPC214x(LPC2142/2144/2146/2148)多种免费商业化软件包及其详细的开发文档:* 移植μC/OS-II到ARM7软件包* 数据队列软件包* 串口驱动软件包* MODEM接口软件包* SPI总线软件包* I2C总线软件包* ZLG/FS V1.0版本文件管理系统软件包* ZLG/GUI图形用户界面软件包* ZLG/SD卡读写软件包* ZLG/USB固件程序及其驱动程序软件包多种可选配置适配器:-各种型号的CPU PACK,用户可按需求和喜好配置主ARM芯片-MG12864点阵图型液晶模块所有I/O口全部引出,方便用户连接外部电路的开发与使用;可进行GPIO的控制实验,如键盘输入、蜂鸣器控制、模拟SPI等;6个独立按键(可用于外部中断、定时器捕获输入),8个LED指示灯;具有RS232转换电路,可与上位机进行通讯,完成UART通讯实验;可以与标准串行modem直接接口,方便远程通讯;具有I2C接口和SPI/SSP接口输出;提供基于PC的人机界面,方便调试实时时钟、串口通信等功能;可进行外部中断实验,学习向量中断控制器(VIC);定时器控制实验,如定时控制LED、定时器捕获等;使用板内的CAT1025(内含复位功能),完成I2C总线的实验;使用74HC595芯片,实现SPI接口数据发送、接收实验;A/D转换实验;DAC转换实验(更换CPU为LPC2132及以上);实时时钟控制实验;WDT及低功耗控制实验;54个基础实验及其大量的中间件软件包,完整地验证了几乎所有的硬件功能资源; 详细的配套资料(《深入浅出ARM7—LPC213x/214x》(上/下册),北航出版社,其中上册为标准配置)。
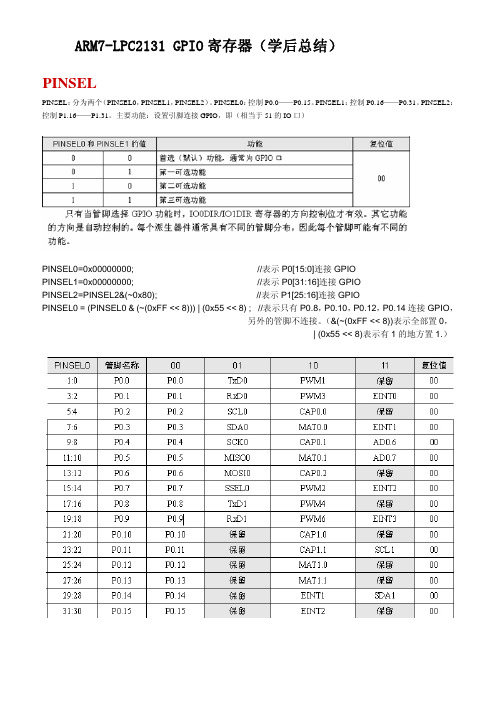
ARM7-LPC2131 GPIO寄存器(学后总结)PINSELPINSEL:分为两个(PINSEL0,PINSEL1,PINSEL2)。
PINSEL0:控制P0.0——P0.15。
PINSEL1:控制P0.16——P0.31。
PINSEL2:控制P1.16——P1.31。
主要功能:设置引脚连接GPIO,即(相当于51的IO口)PINSEL0=0x00000000; //表示P0[15:0]连接GPIOPINSEL1=0x00000000; //表示P0[31:16]连接GPIOPINSEL2=PINSEL2&(~0x80); //表示P1[25:16]连接GPIOPINSEL0 = (PINSEL0 & (~(0xFF << 8))) | (0x55 << 8) ; //表示只有P0.8,P0.10,P0.12,P0.14连接GPIO,另外的管脚不连接。
(&(~(0xFF << 8))表示全部置0,| (0x55 << 8)表示有1的地方置1.)IOPINIOPIN:分为两个(IO0PIN,IO1PIN)。
IO0PIN:控制P0.0——P0.31,IO1PIN:控制P1.16——P1.31。
主要功能:读出引脚的值,但只能是在GPIO配置时才有效。
但也有一种功能可以直接写入数据(I/O同时输出高低电平),PHILIPS不推荐使用。
即(直接赋值给I/O口)。
PINSEL0=0x00000000; //把P0口作为GPIO口。
IO0DIR=0x000000FF; //把P0.0-P0.7都作为输出口,另外的都为输入口。
(0表示输入,1表示输出)。
IO0SET=0x000000F0; //把P0.4-P0.7都变为高电平 。
back=IO0PIN; //把P0口的所有输出位的数据读出,并送给back;IO0CLR=0x0000000F; //把P0.0-P0.3都变为低电平(即清零)。

基于LPC2131型ARM数子时钟嵌入式系统开发1、引言在当今社会,嵌入式系统已经悄然无声融入到我们生活的每一个方面。
人们很少会意识到他们往往随身携带了好几个嵌入系统——MP3,手机或者智能卡等,而且人们在与汽车,电梯,厨房设备,电视,录像机以及设备的嵌入式系统交互时也往往对此毫无觉察。
在信息时代可能有人没接触过计算机,但在现代社会每一个人的生活都或多或少地和嵌入式系统有联系。
人们有时候可能就会问这些所谓的嵌入式系统产品是如何开发出来的呢。
这就是我这篇文章将为你解答的问题。
我想通过一个实例,来说明嵌入式系统开发的流程。
嵌入式系统开发是一个软,硬件协同开发的过程。
ARM嵌入式开发平台是以ARM CPU为开发的硬件平台,以ADS或相关软件为集成开发环境,以ARM-Linux 嵌入式操作系统及各种中间件、驱动程序为软件平台搭建的ARM嵌入式系统,其中,硬件平台和软件平台是核心。
由于嵌入式系统的开展已经过了几十年,要想在一篇一、两千字的文章里把嵌入式系统讲清楚是不可能的。
所以我想以一个很简单的电子时钟实例开发,来展示一下嵌入式系统的开发过程。
2、数子时钟嵌入式系统开发流程首先让我们先看看嵌入式系统的比拟权威一点的定义吧。
根据IEEE〔国际电机工程师协会〕的定义,嵌入式系统是“控制、监视或者辅助装置、机器和设备运行的装置〞〔devices used to control, monitor, or assistthe operation of equipment, machinery or plants〕。
从中可以看出嵌入式系统是软件和硬件的综合体,还可以涵盖机械等附属装置。
目前国内一个普遍被认同的定义是:以应用为中心、以计算机技术为根底、软件硬件可裁剪、适应应用系统对功能、可靠性、本钱、体积、功耗严格要求的专用计算机系统。
看了这个定义我想大部人都可能有点犯晕了。
其实大家只要抓住嵌入式系统用于控制的装置就可以了。
LPC2131基于CPLD的CAN接口设计
刘国栋;王爽心;吴枝祥
【期刊名称】《单片机与嵌入式系统应用》
【年(卷),期】2008(000)005
【摘要】@@ 引言rnPhilips公司的LPC2131是基于ARM7TDMI-S的高性能32位RISC微控制器.它具有ARM处理器的所有优点--低功耗、高性能和较为丰富的片上资源,但LPC2131内部没有集成CAN控制器,而无法利用CAN总线来进行通信.为了使得LPC2131能够利用CAN总线进行通信,可以通过外部扩展来实现其功能.目前,比较普通的方法是在LPC2131的外部采用CAN控制器设计CAN总线接口.LPC2131与CAN控制器的接口电路如图1所示.
【总页数】3页(P66-67,77)
【作者】刘国栋;王爽心;吴枝祥
【作者单位】邯郸学院;北京交通大学;北京龙源正合电力技术有限公司
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于CPLD的异步串行接口设计 [J], 张秀丹
2.基于CPLD的SPI接口设计与实现 [J], 黄勇
3.基于CPLD的DSP与CAN控制器的接口设计与实现 [J], 冯源;豆海利;闫海明
4.基于EMIF接口及CPLD的CAN接口设计和实现 [J], 朱耀国; 秦冲; 屈盼让
5.基于STM32F4和CPLD的高品质立体声USB数字音频接口设计 [J], 刘汉阳;杨雷;杜启行;王奎;孔繁海;邓林涓
因版权原因,仅展示原文概要,查看原文内容请购买。
基于LPC2131嵌入式系统的CAN模块设计与实现随着信息技术技术的飞速发展,ARM技术方案架构作为一种具备低功耗、高性能、以及小体积等特性的32位嵌入式微处理器,得到了众多的知识产权授权用户,其中包括世界顶级的半导体和系统公司。
目前已被广泛的用于各类电子产品,汽车、消费娱乐、影像、工业控制、海量存储、网络、安保和无线等领域。
被业界人士认为,基于ARM的技术方案是最具市场前景和市场优势的解决方案。
现场总线CAN是为解决现代汽车中众多的电控模块之间的数据交换而开发的一种串行通信协议。
由于其具有多主站依据优先权进行总线访问,采用非破坏性总线仲裁,可完成对通信数据的错误检验和优先级判别,数据长度最多为8个字节,传输时间短,受干扰的概率低,抗干扰能力较强,通信速率最高可达1Mbit/s 等特点,它被广泛应用在汽车,工业,消费类电子等领域,而被公认为是最有前途的现场总线之一。
基于ARM在嵌入式系统方面优势和CAN总线的广泛应用,目前越来越多的ARM处理器内部都自带了CAN控制器,极大的方便了开发人员对CAN总线的开发。
但目前仍有些产品中的ARM处理器没有内置CAN控制器,为了能够适应节点间对数据传输所提出的实时性,可靠性的要求,同时又不改变原来的硬件结构,通过外扩CAN接口模块来实现CAN通信成了一个较为合适的选择。
本文基于ARM7TDMI-S处理器LPC2131,对内部没有集成CAN控制器的处理器,设计了较为通用的CAN接口模块的硬件电路,并对CAN总线进行了可靠性设计,而且对基于嵌入式实时操作系统μCOS-II 实现CAN通信,进行了嵌入式软件的设计,最终在实践中对CAN总线通讯的可靠性和可行性进行了验证。
LPC2131Philips LPC2131是基于ARM7TDMI-S的高性能32位RISC微控制器,它一方面具有ARM处理器的所有优点:低功耗、高性能;同时又具有较为丰富的片上资源,非常适合嵌入式产品的开发。
基于ARM7-LPC2131的低功耗电子显示屏设计
赵光绪
【期刊名称】《煤矿机电》
【年(卷),期】2015(000)003
【摘要】针对多数煤矿井下信息显示系统落后的情况,设计了一种基于ARM7-LPC2131的低功耗电子显示屏,即地面数据信息或井下数据信息以通信方式传输至电子显示屏.电子显示屏中的LPC2131微控制器依据人的视觉瞬时特性,以动态扫描数码管的显示方式降低显示功耗,满足了本质安全型电源远距离带载的要求.该电子显示屏通过实际应用表明,能满足在复杂环境条件下各种数据信息的就地显示需求.
【总页数】4页(P34-36,39)
【作者】赵光绪
【作者单位】中国煤炭科工集团重庆研究院,重庆400039
【正文语种】中文
【中图分类】TN141
【相关文献】
1.基于液晶显示屏的数字电子时钟设计 [J], 刘宇超;
2.基于MSP430单片机的低功耗LED点阵显示屏设计 [J], 许燕;王兴君
3.基于液晶显示屏的数字电子时钟设计 [J], 刘宇超
4.基于单片机的LED电子显示屏系统设计 [J], 熊枭;郝海燕;睢利艳
5.基于FPGA的LED电子显示屏系统设计 [J], 陆晶晶
因版权原因,仅展示原文概要,查看原文内容请购买。
关于中断处理LPC2131 使用的ARM PrimeCell向量中断控制器将所有的中断分为三种:FIRQ IRQ向量中断IRQ非向量中断,最多可支持32个中断输入。
而我们使用的EasyARM2131开发板提供了21个中断源。
FIRQ有最高的优先级IRQ向量中断次之IRQ非向量中断优先级最低其中IRQ向量中断:最多可定义16个,支持优先级策略,优先级设置通过将中断源编号置入VICVectCntX寄存器来完成,X数字越低,优先级越高,对应的中断服务程序地址置于相应的VICVectAddrX中。
在IRQ中断产生时,根据优先级,应得到处理的高优先级中断的服务程序地址将被拷贝到VICVectAddr中。
IRQ非向量中断:不支持优先级,其服务程序地址被置于默认向量地址寄存器VICDefVectAddr 中,在有中断请求时会拷贝到VICVectAddr中,具体是哪个中断源发出的请求,需要在服务程序中,通过查询VICIRQStatus判断哪个中断源编号被置位来确定,这样服务程序会稍显臃肿。
以上说明非FIRQ中断,最终应进入的服务程序的地址会被写入VICVectAddr中。
一旦产生IRQ 中断,微控制器会切换到IRQ模式,并跳转到向量表0x00000018处执行,如代码列表(1)处所示,因为ARM7TDMI是3级流水线,因而PC的值应为0x00000020, 减去0xff0为0xfffff030恰好是VICVectAddr的地址。
这样用这条指令便可进入中断处理程序对于FIQ,因为一般其对响应速度要求较高,所以一般只定义一个。
与IRQ非向量中断类似,如果多于一个,则应在服务程序中读取VICFIQStatus来确定中断源,FIQ的中断服务程序定义在FIQ_Handler中。
一旦产生FIQ中断,处理器会切换到FIQ迷失并跳转带0x0000001C地址执行程序,最终将跳到FIQ_Handler标号处,处理FIQ中断startup.s 文件;此代码位于0x00000000 处,也就是说这段代码是上电后执行的第一段代码(在首句就会跳转)。