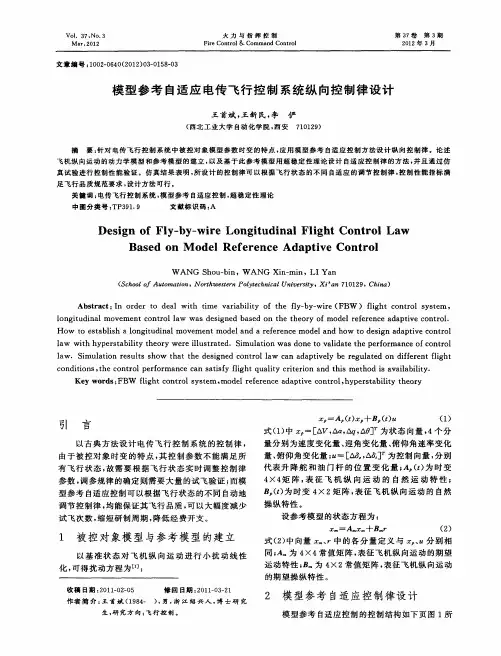
纵向控制增稳飞行控制律
- 格式:doc
- 大小:9.24 MB
- 文档页数:6
飞行器稳定性与控制理论的综合应用在现代航空航天领域,飞行器的稳定性和控制是至关重要的课题。
无论是飞机在万米高空的平稳飞行,还是航天器在浩瀚宇宙中的精准定位,都离不开稳定性与控制理论的支持和应用。
要理解飞行器的稳定性,我们可以先从日常生活中的例子说起。
想象一下骑自行车,如果车身不稳,很容易摔倒;而如果能保持平衡,就能轻松骑行。
飞行器也是如此,稳定性就是让它在飞行过程中保持平衡和可预测的状态。
这包括纵向稳定、横向稳定和方向稳定等多个方面。
纵向稳定主要关注飞行器在俯仰方向上的平衡。
比如,当飞机机头抬起或下降时,要有相应的机制来防止过度偏离正常姿态。
横向稳定则关乎飞行器在滚转方向的平衡,确保飞机不会意外侧翻。
方向稳定则侧重于飞行器在偏航方向上的稳定,使其能沿着预定的航线飞行。
控制理论则是实现飞行器稳定飞行的手段。
就好像我们驾驶汽车时通过方向盘、刹车和油门来控制车辆,飞行器也有各种控制面和系统来调整飞行姿态。
常见的控制面包括副翼、升降舵和方向舵。
副翼用于控制飞机的滚转,升降舵负责俯仰,方向舵则控制偏航。
在实际应用中,飞行器稳定性与控制理论的综合运用体现在多个方面。
首先是飞行器的设计阶段。
工程师们需要根据飞行器的用途、飞行环境和性能要求,精心设计机身结构、机翼形状和控制面布局,以确保飞行器在先天结构上就具备良好的稳定性。
例如,大型客机通常采用大展弦比的机翼设计,以提高升力和纵向稳定性;战斗机则需要更灵活的机翼和控制面设计,以满足高机动性的需求。
飞行控制系统是实现飞行器稳定与控制的核心。
这一系统通过传感器收集飞行器的姿态、速度、高度等信息,然后根据预设的控制算法,向控制面发送指令,实现对飞行器的精确控制。
现代飞行控制系统越来越智能化,能够自动适应不同的飞行条件和任务需求。
比如,在遭遇气流颠簸时,系统可以迅速调整控制面,保持飞行器的稳定;在执行复杂的机动动作时,系统能够精确计算控制指令,确保动作的准确性和安全性。
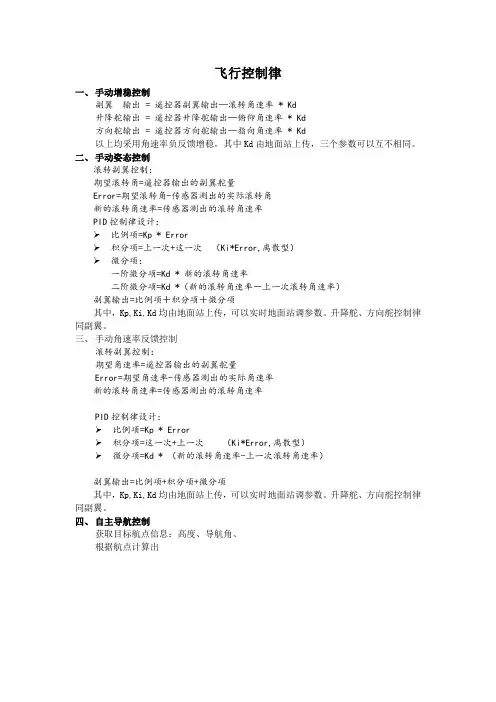
飞行控制律
一、手动增稳控制
副翼输出=遥控器副翼输出—滚转角速率 *Kd
升降舵输出 = 遥控器升降舵输出—俯仰角速率 *Kd
方向舵输出 = 遥控器方向舵输出—指向角速率 *Kd
以上均采用角速率负反馈增稳,其中Kd由地面站上传,三个参数可以互不相同。
二、手动姿态控制
滚转副翼控制:
期望滚转角=遥控器输出的副翼舵量
Error=期望滚转角-传感器测出的实际滚转角
新的滚转角速率=传感器测出的滚转角速率
PID控制律设计:
比例项=Kp * Error
积分项=上一次+这一次(Ki*Error,离散型)
微分项:
一阶微分项=Kd * 新的滚转角速率
二阶微分项=Kd*(新的滚转角速率-上一次滚转角速率)
副翼输出=比例项+积分项+微分项
其中,Kp,Ki,Kd均由地面站上传,可以实时地面站调参数。
升降舵、方向舵控制律同副翼。
三、手动角速率反馈控制
滚转副翼控制:
期望角速率=遥控器输出的副翼舵量
Error=期望角速率-传感器测出的实际角速率
新的滚转角速率=传感器测出的滚转角速率
PID控制律设计:
比例项=Kp* Error
积分项=这一次+上一次(Ki*Error,离散型)
微分项=Kd*(新的滚转角速率-上一次滚转角速率)
副翼输出=比例项+积分项+微分项
其中,Kp,Ki,Kd均由地面站上传,可以实时地面站调参数。
升降舵、方向舵控制律同副翼。
四、自主导航控制
获取目标航点信息:高度、导航角、
根据航点计算出。

第四章 纵向运动 4.1 纵向运动线性化方程前面推导出来的线性化的纵向方程组重写如下:⎪⎪⎪⎩⎪⎪⎪⎨⎧∆+∆=∆-+∆+-∆-∆+∆=∆-+-∆--+∆-∆+∆=∆+∆-∆-T e q w w u T e qw w u T e w u T e T e T e M M dt d M dt d w M dt d M u M Z Z g dt d Z u w Z dt d Z u Z X X g w X u X dt dδδθδδθθδδθθδδδδδδ)()(]sin )[())1[()cos ()(22000 (4.1-1)其中e δ∆和T δ∆分别是空气动力控制项和推力控制项。
在工程实践中,力的导数q Z 和w Z 通常被忽略,因为它们对飞机响应的贡献非常小。
考虑到q ∆=∆θ,上面方程改写为状态空间的形式,得 ⎥⎦⎤⎢⎣⎡∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆∆T e w w w q ww w u w u wu w u T T ee Te Te Z M M Z M M Z Z X X q w u u M M Z M M Z M M u Z Z g X X q w uδδθθδδδδδδδδ0001000000(4.1-2)如果写成η B x A x+= 则有u w x q θ∆⎡⎤⎢⎥∆⎢⎥=⎢⎥∆⎢⎥∆⎣⎦,⎥⎦⎤⎢⎣⎡∆∆=T e δδη (4.1-3)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-=01000000u M M Z M M Z M M u Z Z g X X A w q ww w u w u wu w u (4.1-4) ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++=00T TTeTe Z M M Z M M Z Z X X B w w δδδδδδδδ (4.1-5)矩阵中力和力矩的导数已经分别除以飞机的质量和惯性矩。

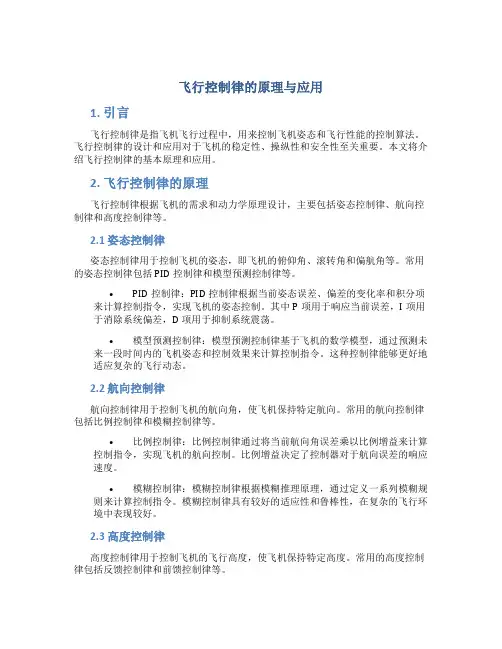
飞行控制律的原理与应用1. 引言飞行控制律是指飞机飞行过程中,用来控制飞机姿态和飞行性能的控制算法。
飞行控制律的设计和应用对于飞机的稳定性、操纵性和安全性至关重要。
本文将介绍飞行控制律的基本原理和应用。
2. 飞行控制律的原理飞行控制律根据飞机的需求和动力学原理设计,主要包括姿态控制律、航向控制律和高度控制律等。
2.1 姿态控制律姿态控制律用于控制飞机的姿态,即飞机的俯仰角、滚转角和偏航角等。
常用的姿态控制律包括PID控制律和模型预测控制律等。
•PID控制律:PID控制律根据当前姿态误差、偏差的变化率和积分项来计算控制指令,实现飞机的姿态控制。
其中P项用于响应当前误差,I项用于消除系统偏差,D项用于抑制系统震荡。
•模型预测控制律:模型预测控制律基于飞机的数学模型,通过预测未来一段时间内的飞机姿态和控制效果来计算控制指令。
这种控制律能够更好地适应复杂的飞行动态。
2.2 航向控制律航向控制律用于控制飞机的航向角,使飞机保持特定航向。
常用的航向控制律包括比例控制律和模糊控制律等。
•比例控制律:比例控制律通过将当前航向角误差乘以比例增益来计算控制指令,实现飞机的航向控制。
比例增益决定了控制器对于航向误差的响应速度。
•模糊控制律:模糊控制律根据模糊推理原理,通过定义一系列模糊规则来计算控制指令。
模糊控制律具有较好的适应性和鲁棒性,在复杂的飞行环境中表现较好。
2.3 高度控制律高度控制律用于控制飞机的飞行高度,使飞机保持特定高度。
常用的高度控制律包括反馈控制律和前馈控制律等。
•反馈控制律:反馈控制律根据当前高度误差和变化率来计算控制指令,实现飞机的高度控制。
反馈控制律可以根据飞机的实际状态进行实时调整,以实现稳定的高度控制。
•前馈控制律:前馈控制律基于飞机的数学模型,通过预测未来一段时间内的高度变化来计算控制指令。
前馈控制律可以提前响应高度变化,具有较好的动态性能。
3. 飞行控制律的应用飞行控制律的应用广泛存在于飞机的自动驾驶系统和飞行操纵系统中。
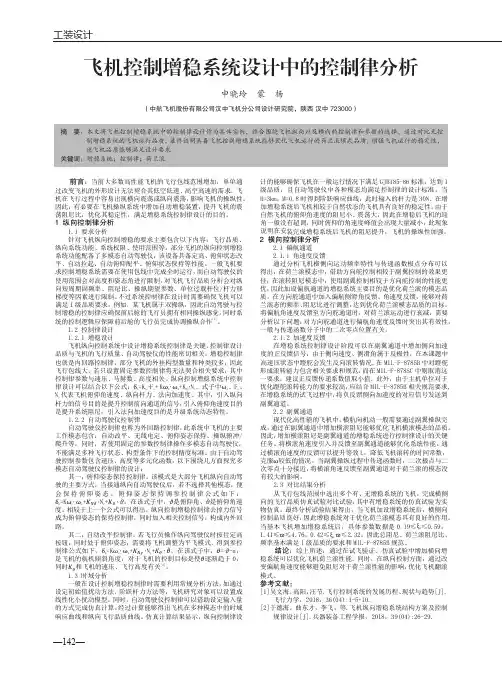
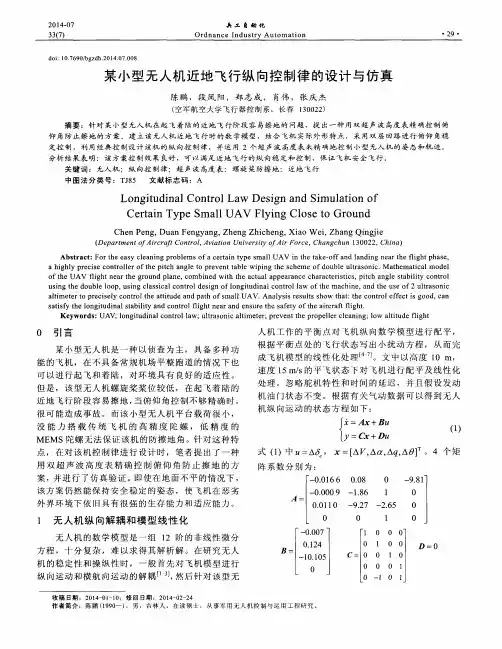
—142—工装设计摘 要:本文将飞机控制增稳系统中的控制律设计作为具体实例,结合围绕飞机纵向以及横向的控制律和参数的选择,通过对比无控制增稳系统的飞机运行品质,最终证明具备飞机控制增稳系统能够优化飞机运行的荷兰滚模式品质,增强飞机运行的稳定性,使飞机品质能够满足设计要求。
关键词:增稳系统;控制律;荷兰滚飞机控制增稳系统设计中的控制律分析 申晓玲 蒙 杨(中航飞机股份有限公司汉中飞机分公司设计研究院,陕西 汉中 723000)前言:当前大多数高性能飞机的飞行包线范围增加,单单通过改变飞机的外形设计无法契合其低空低速、高空高速的需求。
飞机在飞行过程中容易出现横向震荡或纵向震荡,影响飞机的操纵性。
因此,有必要在飞机操纵系统中增加自动增稳装置,提升飞机的震荡阻尼比,优化其稳定性,满足增稳系统控制律设计的目的。
1纵向控制律分析1.1要求分析针对飞机纵向控制增稳的要求主要包含以下内容:飞行品质、纵向系统功能、系统权限、使用范围等。
部分飞机的纵向控制增稳系统功能配备了多模态自动驾驶仪,该设备具备定高、俯仰状态改平、自动拉起、自动俯仰配平、俯仰状态保持等性能。
一般飞机要求控制增稳系统需要在使用包线中完成全时运行,而自动驾驶仪的使用范围会对高度和姿态角进行限制。
对飞机飞行品质分析会对纵向短周期固频率、阻尼比、操纵期望参数、单位过载杆位/杆力移梯度等因素进行限制。
不过系统控制律在设计时需要确保飞机可以满足I 级品质要求。
例如,某飞机属于双操纵,因此自动驾驶与控制增稳的控制律应确保前后舱的飞行员拥有相同操纵感觉,同时系统的控制逻辑应保障前后舱的飞行员完成协调操纵合作[1]。
1.2控制律设计1.2.1增稳设计飞机纵向控制系统中设计增稳系统控制律是关键,控制律设计品质与飞机的飞行质量、自动驾驶仪的性能密切相关。
增稳控制律也就是内回路控制律,部分飞机的外挂构型数量和种类较多,因此飞行包线大,若只设置固定参数控制律将无法契合相关要求,其中控制律参数与速压、马赫数、高度相关。
78 | 电子制作 2021年01月困难。
故需要设计增稳控制律,借助于飞行控制系统,使直升机在飞行包线内满足飞行品质要求[2]。
文章中,直升机横侧向通道控制律设计要求是,在如图1所示飞行包线内选定的18个设计节点处,倾斜通道、航向通道均满足如下动态品质要求:(1)倾斜通道:操作驾驶杆,使直升机产生±25º的倾斜角变化后松杆,直升机回到原平衡状态的调节时间5s s t ≤,超调量σ%≤10%。
(2)航向通道:给定±5º的航向阶跃指令,直升机稳定在新航向上的调节时间5s s t ≤,超调量σ%≤25%。
图1 飞行包线示意图1 横侧向控制系统描述直升机横侧向控制系统结构图如图2所示。
图中所示直升机的状态向量Tv ϕϕψψ= x 中的分量依次为倾斜角、倾斜角速度、偏航角、偏航角速度和侧向速度,其中前四个状态可测。
输入Tg g ϕψ = u 中的分量分别为给定倾斜角和给定偏航角。
倾斜通道、航向通道均采图2 直升机横侧向控制系统结构图图2中的两个一阶环节分别是倾斜通道和航向通道助力器的传递函数。
可以分别导出倾斜通道和航向通道助力器的微分方程:1A A A gA A A A k k k k k k Aic Aic T T T T ϕϕϕϕϕϕ=−−−+ 1rc rc g k k k k k k T T T T δδδψψψδδδδδψψδψ=−−−+ 将横向周期变距Aic 、尾桨桨距rc δ扩充为新的状态变量,可以导出扩充后直升机横侧向系统的状态方程。
将可测量的4个状态作为输出T []ϕϕψψ=y ,可以得到相应系统闭环状态方程:cb cb cb =+ = xA xB u yC x(1)其中,状态向量T []rc vAic ϕϕψψδ=x ,输入为Tg g ϕψ = u 。
b A c 、b B c 、cb C 是适当维数的矩阵。
根据引言中对系统动态性能要求,可以分别确定倾斜、航向通道分别满足要求的系统闭环极点的分布范围为:倾斜通道: min min 0.591=(53.8)1.184n ϕϕϕξξβωω≥≤°≥=(2)航向通道: 0.404(66.17)1.734n ψψψξβω≥≤°≥ (3)2 倾斜通道控制律设计式(2)规定了满足要求的倾斜运动极点1,2d nd j s ξω=−±www�ele169�com | 79自动化技术nd nd ω±的分布范围,这在s 平面相应确定了一个扇形3中灰色实线所描绘。
第37卷第2期2005年4月 南 京 航 空 航 天 大 学 学 报Journal of Nanjing U niversity of Aeronautics &Astronautics V ol.37N o.2 A pr.2005跨大气层飞行器爬升段纵向飞行控制律和制导律设计周欲晓1,张子彦2,明 晓3(1.南京航空航天大学无人机研究院,南京,210016;2.成都飞机设计研究所,成都,610041;3.南京航空航天大学航空宇航学院,南京,210016)摘要:由于火箭发动机的巨大推力,跨大气层飞行器在爬升段加速很快,重量、重心、惯量、飞行速度以及飞行高度等参数变化剧烈,无法简单地用固定控制增益参数的形式来保证整个飞行包线内的飞行品质要求。
根据飞行器的爬升特点和控制难点,在爬升段的飞行包线内选择典型设计点,分别进行纵向内外回路控制律的详细设计。
采用控制增益参数随动压变化进行调参的方法,对爬升段飞行轨迹进行了数字仿真,结果表明设计的控制增益参数及控制律,满足了跨大气层飞行器爬升段的预定目标要求。
关键词:跨大气层飞行器;控制增益;纵向控制律设计;飞行轨迹仿真中图分类号:V 249 文献标识码:A 文章编号:1005-2615(2005)02-0174-04 收稿日期:2004-09-04;修订日期:2004-10-26 作者简介:周欲晓,女,博士研究生,1970年4月生,E -mail:yux iaozhou @;张子彦,男,研究员,1943年1月生;明 晓,男,教授,博士生导师,1944年5月生。
Longitudinal Flight Control and Guidance Law Design forTrans -aerosphere Vehicle During Climbing PhaseZH OU Yu -x iao 1,ZH A N G Zi -y an 2,M ing X iao3(1.Research Instit ut e of U nmanned A ir craft ,N anjing U niver sity of A er onautics &A str onautics,N anjing ,210016,China ;2.Cheng du A ir craft Desig n &Research Instit ut e,Cheng du,610041,China;3.Co llege o f A ero space Engineer ing ,N anjing U niver sity of A er onautics &A str onautics ,N anjing ,210016,China )Abstract :During the accelerated clim bing phase ,the par am eters ,such as w eight ,center of gravity ,inertia,flight v elo city and altitude are very quickly changed for trans-aero sphere vehicle (TAV ).It is difficult to ensure flying qualities by simply using co nstant co ntrolling gains in the w hole flight envelope .According to these considerations ,several typical desig n points of the flig ht env elo pe are selected to design lo ng itudinal inner and o uter control law .The m ethod for controlling gains scheduled by the pressure is used to digitally sim ulate the flight path.Sim ulation results show that the designing gain parameters are reaso nable and m eet the T AV scheduled climbing go al.Key words :trans -aer osphere vehicle (T AV );contro l gain ;lo ng itudinal control law desig n ;flight pathsim ulating 跨大气层飞行器在动力加速爬升段飞行过程中,短时间内跨越了从低空到高空、从亚声速到超声速的剧变过程,飞行器的飞行速度、飞行高度、重量、重心和转动惯量等参数变化剧烈,并且由于推力相当巨大,跨大气层飞行器的纵向加速度也是普通飞机无法比拟的[1,2]。
纵向控制增稳飞行控制系统实验指导书1.实验目的(1)理解并掌握飞行控制系统纵向控制增稳的工作原理、控制方法、主要控制参数设计等;(2)掌握机械操纵系统、增稳系统、控制增稳系统的相关飞控知识;(3)熟练使用Matlab仿真软件、FlightGear仿真环境、网络数据通讯等基本工具进行数值仿真。
2.实验内容(1)数值仿真模型搭建(2)模型认知与参数设置(3)纵向控制增稳控制仿真3、实验原理(1)控制增稳控制律构型的设计控制增稳控制律构型采用法向过载与经由高通滤波的俯仰角速率综合而实k n z n z,c kq^qe,c现。
控制律如下:(2)放宽静稳定性控制律设计静稳定性补偿采用经低通滤波器输出的迎角反馈进行纵向静稳定性补偿,以保证系统静稳定性的同时,不影响动态响应性能。
控制律如下:e,c(3)中性速度稳定性控制律设计中性速度稳定性控制律通过在前向支路过载指令与反馈信号综合处的下游加入比例积分控制律来实现。
综上得到最终的纵向控制增稳飞行控制律如下:a sk s 1 n z “(4)基于FlightGear的飞行仿真环境搭建本文借鉴飞行模拟器的结构框架,设计的基于FlightGear的飞行仿真系统的总体结构如图所示。
该系统主要由操纵输入设备、飞行仿真及虚拟仪表系统、通信网络和视景显示系统四部分组成,其硬件均采用常规商业产品,具有成本低廉,结构简单,构建方便,移植性强等优点,最重要的是它突出了飞行控制研究最关心的高效的飞行仿真和逼真的视景显示。
UDP协议构建的基于FlightGear的飞行仿真系统实物如图所示。
其中,视景显示采用液晶显示器,根据需要可扩展为投影显示系统操纵设备4.操作步骤(1)数值仿真模型搭建在Matlab中打开Simulink组件,搭建纵向控制增稳控制律仿真模型,如图所示。
(2)模型认知与参数设置双击其中每个Simulink组件图标,弹出对话框后可设置参数,如图所示为放宽静稳定性控制律的参数设置对话框。
纵向控制增稳飞行控制系统实验指导书
1. 实验目的
(1)理解并掌握飞行控制系统纵向控制增稳的工作原理、控制方法、主要控制参数设计等;
(2)掌握机械操纵系统、增稳系统、控制增稳系统的相关飞控知识; (3)熟练使用Matlab 仿真软件、FlightGear 仿真环境、网络数据通讯等基本工具进行数值仿真。
2. 实验内容
(1)数值仿真模型搭建 (2)模型认知与参数设置 (3)纵向控制增稳控制仿真 3、实验原理
(1)控制增稳控制律构型的设计
控制增稳控制律构型采用法向过载与经由高通滤波的俯仰角速率综合而实现。
控制律如下:
,,e c z z c q
s k n n k q s b δ⎛⎫=-+ ⎪+⎝
⎭
(2)放宽静稳定性控制律设计
静稳定性补偿采用经低通滤波器输出的迎角反馈进行纵向静稳定性补偿,以保证系统静稳定性的同时,不影响动态响应性能。
控制律如下:
,e c c
k s c
α
δα=-+
(3)中性速度稳定性控制律设计
中性速度稳定性控制律通过在前向支路过载指令与反馈信号综合处的下游加入比例积分控制律来实现。
综上得到最终的纵向控制增稳飞行控制律如下:
,,1e c z z c q a
s
c
k n n k q k s s b s c αδα⎛⎫⎛
⎫
=+-+- ⎪⎪++⎝⎭⎝
⎭
(4)基于FlightGear 的飞行仿真环境搭建
本文借鉴飞行模拟器的结构框架,设计的基于FlightGear 的飞行仿真系统的
总体结构如图所示。
该系统主要由操纵输入设备、飞行仿真及虚拟仪表系统、通信网络和视景显示系统四部分组成,其硬件均采用常规商业产品,具有成本低廉,结构简单,构建方便,移植性强等优点,最重要的是它突出了飞行控制研究最关心的高效的飞行仿真和逼真的视景显示。
构建的基于FlightGear 的飞行仿真系统实物如图所示。
其中,视景显示采用液晶显示器,根据需要可扩展为投影显示系统。
4. 操作步骤
(1)数值仿真模型搭建
在Matlab中打开Simulink组件,搭建纵向控制增稳控制律仿真模型,如图所示。
(2)模型认知与参数设置
双击其中每个Simulink 组件图标,弹出对话框后可设置参数,如图所示为放宽静稳定性控制律的参数设置对话框。
该实验给定了四种典型的系统状态点预设参数和一种自定义参数的设计。
在典型状态点处,纵向控制增稳控制律的控制器参数设计可参考下表数据:
包线区域 状态点状态 控制器参数
Ⅰ H=500,M=0.177 2.6513,0.4787,0.0752q k k k α=== Ⅱ H=500,M=0.207 2.1636,0.0984,0.1118q k k k α==-= Ⅲa H=9000,M=0.593 1.6298,0.1378,0.1359q k k k α=== Ⅲb
H=3000,M=0.791
1.5,0.5,0.167q k k k α===
5、纵向控制增稳控制仿真
对于四种典型的系统状态点,给定预设的控制器参数,可对纵向通道控制增稳飞行控制律进行仿真。
以区域I 为例,给定法向过载增量指令,0.1z c n ∆=,数值控制器参数值为 2.6513,0.4787,0.0752q k k k α===,飞机各状态变量的短周期响应过程如图所示。
n z ( g )
α ( ︒ )
22
242628θ ( ︒ )
H ( m )
V ( m /s )
0.168
0.170.1740.178
M
time ( s )
∆δ e ( ︒
)
time ( s )
∆δ l e f ( ︒
)
1
time ( s )
q ( ︒/s )
按照同样的方法,改变飞机模型为其他三种典型工作点,设置控制器参数,均可得到给定法向过载增量指令时的飞机各状态变量的短周期响应过程。
控制器参数设计需要注意:
(1)所设计的纵向控制增稳控制律对于规定的法向过载增量指令的控制精度要更高,全包线内均优于法向过载时间响应准则的要求。
其它各状态变量的响应迅速而柔和,因而具有较好的短周期特性。
(2)舵面偏转增量较小,需要满足实际系统对用舵量的限制。
6、实验思考题
(1)解释采用法向过载与经由高通滤波的俯仰角速率综合的控制增稳原理是什么?其优势在哪?
(2)解释采用迎角反馈进行纵向静稳定性补偿的基本原理是什么? (3)设计的控制增稳飞行控制律是如何保证中性速度稳定的?
(4)根据设计的控制增稳飞行控制律,分析系统的幅值裕度和相角裕度,
是否满足国军标要求?。