注塑机机械手
- 格式:doc
- 大小:29.00 KB
- 文档页数:9
艾尔发注塑机机械⼿说明书⽬录0.前⾔1.控制系统1.1 控制系统功能及规格...................................................................................1-11.2 硬件配置图…...............................................................................................1-21.3 五轴电⼒系统说明.....................................................................................1-101.4 三轴电⼒系统说明.....................................................................................1-111.5 输⼊输出定义说明......................................................................................1-131.6 与射出机标准接线图…............................................................................1-181.7 射出机联机说明(请参阅EUROMAP 12).................................................1-191.8 复归接头说明.............................................................................................1-211.9 电缆、辅助电驿说明……………………………………………………........1-22 1.10 编码器电缆线说明…………………………………………………….…....…1-26 1.11连结操作屏幕和控制器编号说明……………………........................…........1-271.12伺服转接板和驱动器联机说明……………………………………………......1-282.操作说明2.1 开机启动程序流程图.....................................................................................2-1 2.2 关机程序流程……..........................................................................................2-2 2.3 IMM信号处理说明.….......................................................................................2-2 2.4归原点动作说明….........................................….....….....................................2-3 2.5⼿动操作说明.......................................................................................................2-4 2.6⾃动操作说明…….................................................................…......................2-72.7⽣产管理................................................…....................................................2-113 程序编辑3.1命令说明...................................................................…....................................3-1 3.1.1编辑器说明.....................................................................…...........................3-2 3.1.2教导指令...........................................................................….........................3-3 3.1.3编辑新程序.................................................................…............................3-10 3.1.4 编好新程序试运⾏..................................................…...............................3-35 3.1.5程序内容编修.....................................................….....................................3-36 3.1.6 档案编辑......................................................…..........................................3-41 3.1.7堆叠功能设定.........................................................…..................................3-44 3.1.8取样/不良位置设定........................................................….......................... 3-46 3.2对话编辑程式..........................................................…....................................3-463.2.1模内参数设定..........................................….................................................3-473.2.2中途参数设定...............................................................................................3-503.2.3终点功能设定...............................................................................................3-513.2.4公共参数设定...............................................................................................3-523.2.5资料存储......................................................................................................3-53 4维护篇4.1系统相关参数设定............................................................................................4-14.1.1操作设定........................................................................................................4-14.1.2禁区设定........................................................................................................4-24.1.3极限设定........................................................................................................4-34.1.4出⼚设定........................................................................................................4-34.1.5语⾔切换........................................................................................................4-44.1.6系统参数备份.................................................................................................4-44.1.7系统升级........................................................................................................4-54.2系统维护...........................................................................................................4-64.3教好程序备份..................................................................................................4-104.4操作错误说明..................................................................................................4-11 5⾼级应⽤及编程5.1系统设定...........................................................................................................5-15.2指令说明..........................................................................................................5-65.2.1逻辑运算指令................................................................................................5-75.2.2数值设定类....................................................................................................5-85.2.4 系统数据备份和还原...................................................................................5-10。
2.操作说明2.1 开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home 键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2 关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
2.3 IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“馬達強制激磁”,按键,反方向操作轴寸动。
注塑机机械手使用方法注塑机机械手是一种用于注塑机操作和自动化生产的设备。
它具有精确的定位控制,高效的作业速度和稳定的运行性能,被广泛应用于制造业的各个领域。
下面将详细介绍注塑机机械手的使用方法。
一、安装调试1. 检查注塑机机械手的外观和内部结构,确认设备完好无损。
2. 将机械手安装在注塑机旁边的工作台上,确保机械手与注塑机之间有足够的操作空间。
3. 将机械手的电源线和控制线连接到对应的电源和控制系统上。
4. 根据注塑机的参数设置,对机械手进行调试和校准,确保它能够准确地抓取注塑件并进行操作。
二、操作流程1. 开机准备a. 打开注塑机和机械手的电源开关。
b. 启动注塑机和机械手的控制系统,并进行初始化。
c. 清理注塑机的工作台和周围环境,确保工作环境整洁。
2. 参数设置a. 根据注塑件的尺寸、重量和工艺要求,设置机械手的抓取和操作参数,包括抓取点坐标、速度、力度等。
b. 根据生产任务的要求,设置机械手的作业模式,如单循环操作、连续运行、自动换模等。
3. 作业操作a. 手动操作:通过控制面板或操作手柄控制机械手进行手动操作,包括移动、抓取、放置等。
进行手动操作时,需要操作员具备相关技术和经验,确保操作安全和准确。
b. 自动化操作:通过预设程序和触发信号,实现机械手的自动化操作。
操作员只需设置好注塑机和机械手的参数,启动自动操作模式,机械手将按照预设程序进行操作,减少人工干预和提高生产效率。
4. 监控和调试a. 在操作过程中,及时监测机械手的运行状态和作业效果,如抓取力度、抓取准确度等。
如有异常或问题,及时进行调整和修复。
b. 定期对机械手进行保养和维护,清洁抓取爪、油润滑系统、检查电气部件的连接情况等,确保设备的正常运行和延长使用寿命。
5. 安全操作a. 在操作注塑机机械手时,操作员应严格按照操作规程进行操作,遵守安全生产规范。
b. 在进行机械手操作前,确保注塑机停止工作,避免误操作引起事故。
6. 故障排除a. 如果机械手出现故障或异常,及时停机排除故障,避免对生产环节造成影响。
第机械手与注塑机的连接1、安装机械手前确认:因为国产和进口注塑机(欧洲除外)都自成一格,没有统一的规范,所以在装机械手前要对注塑机的固定安装与接线进行确认。
1.1.1注塑机与机械手安装确认:要求提供注塑机与机械手固定面的安装孔位及孔位尺寸,便于装机人员在装机前对制作固定机械手的过桥板;需要打孔的须提供注塑机固定板的安装平面尺寸;如注塑机固定板安装面为异型需提供图纸与照片。
1.1.2注塑机与机械手连线确认:要求提供注塑机的电路接线路图,便于装机人员在装机前对注塑机电路有所了解,提前拿出方案,并可查寻注塑机连线记录表,确保装机时快速无误的完成机械手连线。
2、连线时必须注意事项:安装机械手时必须先对注塑机电路的I/O点接线进行核对确认,并且关断注塑机控制电源,方可连线,连线完毕后必须再次确认,连线是否漏接、错接、短路的现象,然后再通电,并且能随时紧急断电。
3、富井注塑机专用机械手与注塑机主要连接信号:1)可开模联锁★★★2)可开模联锁★★★3)可关模联锁★★★4)可关模联锁★★★5)合模阀联锁★★★6)合模阀联锁★★★7)可顶出联锁★★★8)可顶出联锁★★★9)预留★10)预留★11)熔胶信号★★12)熔胶信号★★13)开模完成信号★★14)开模完成信号★★15)安全门关信号★★16)安全门关信号★★4、富井注塑机专用机械手信号分析4.1、注塑机专用机械手输入信号(由注塑机输出,先用万用表量出确实动作信号电压,然后关断注塑机电源,再与接线,并确认无误后在通电)4.1.1开模完信号:此信号为注塑机开模到底时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手可下行的开启信号。
当注塑机专用机械手在手动时,如无开模完信号,又强行按下行键,手臂不下行,且手控器显示报警。
在全自动时,如开模完无切换动作,手臂不下行取物。
4.1.2熔胶信号:此信号为注塑机熔胶时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手安全信号。
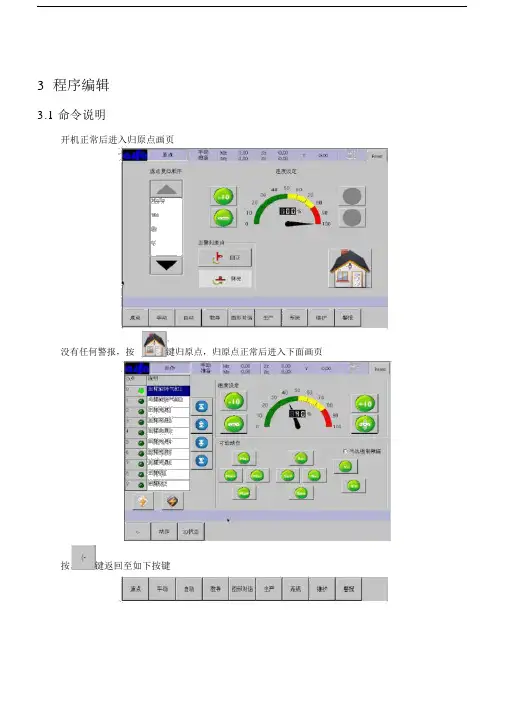
3程序编辑3.1 命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“ MX ”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
2)速度按键进入速度设定。
3)计时按键进入延时功能设定。
4)一般 I/O按键进入侧姿回正等选择。
5)成型 I/O按键进入成型相关条件设定。
6)治具 I/O按键进入治具相关功能设定。
7)周边 I/O按键进入周边相关功能设定。
8)回圈按键进入循环功能设定。
9)跳跃按键进入跳转功能设定。
10)停止按键进入程序完成设定。
11)宏按键进入调用已经编好的子程序。
编号为 0~99 共 100 个。
12)堆叠按键进入装箱取物功能设定。
编号为 0~3 共 4 个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面点击档案按钮进入如下画面在此页点击按钮,切换到如下画面点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2)速度按键进入如下画面点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
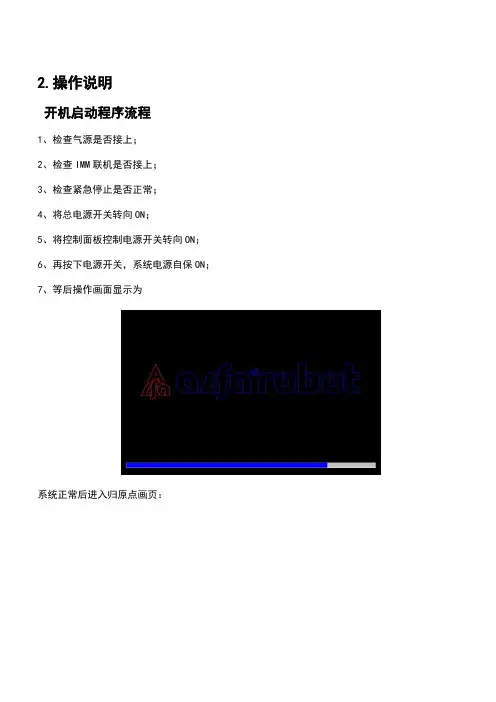
2.操作说明开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home 键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“馬達強制激磁”,按键,反方向操作轴寸动。
寸动时轴运行速度快慢调整。
光标移到要输出的选项,点击输出。
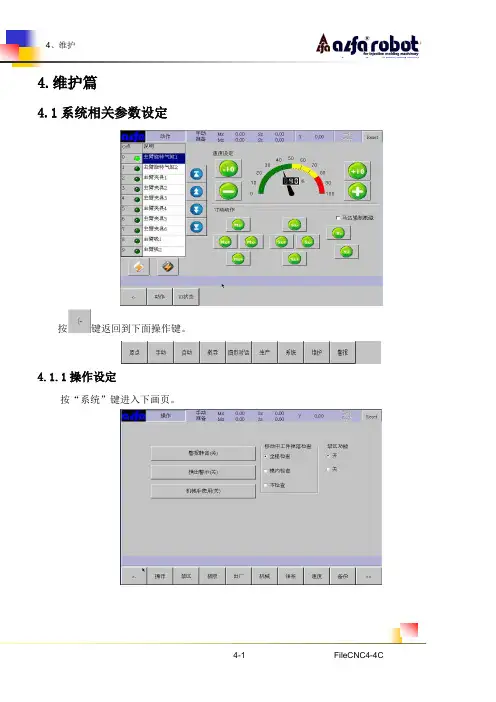
4.维护篇4.1系统相关参数设定按键返回到下面操作键。
4.1.1操作设定按“系统”键进入下画页。
4.1.2禁区设定按“禁区”键进入下画页。
在此画面设定各轴禁区位置。
4.1.3极限设定按“极限”键进入下画页。
在此画面设定各轴最大最小值。
4.1.4出厂设定按“出厂”键进入下画页。
在此面可以看机械出厂前相关信息。
4.1.5语言切换按“语系”键进入文字切换。
4.1.6系统参数备份按“备份”键进入系统参数备份。
在主机USB接口插入U盘,选汇出到USB,选要汇出内容点击“开始传输”键,把数据传到U盘。
如下图所示:若U盘内有改好的Ladder,可以由USB汇入。
更改PLC后由此传到控制器。
4.1.7系统升级按键返回,再按“>>”键切换下一功能键,点击“升级”键。
在主机USB接口插入U盘,盘内有要升级的程序,点“确定”开始程序升级。
4.2系统维护在操作切换栏按“维护”键进入下面画页。
在此画面可以观看系统变量内的值,程序执行时是否按要求变化。
发生故障时查找原因。
按“I/OMap”键进入下面画页。
在DIMap,DOMap内offset位看I/O点实际对应硬件接线位置。
按键返回,再按“切换用户”键进入下面画页。
在此画页内更改操作权限。
10~19为机械厂使用权限。
20~29为编辑权限。
99为一般用户权限。
改变使用者等级输入密码"****"点击OK键后出现如下画页在此等级下,进入编辑,修改。
按键返回,再按“操作权限”键进入下面画页。
此画页设定不同画页采用不同使用权限。
按键返回,再按“变更密码”键进入下面画页。
用户根据要求设定新密码。
按键返回,再按“阶梯图”键进入下面画页。
通过此画页看程序运行,以及PLC输入输出等状态。
4.3教好程序备份在教导画页内按“档案”键进入下面画页。
在此画页按“汇入汇出”键进入下面画面。
在主机USB接口插入U盘,选汇出到USB,选要汇出内容点击“开始传输”键,把数据传到U盘。
目录题目:模具注塑机机械手控制电路设计1前言3引言3一、机械手的发展与应用现状3二、机械手的前景及方向5三、本课题的研究意义6第一章机械手硬件设计7一、机械手的总体设计7二、机械手的动作过程8三、主要部件及零件及要求8四、运动方式和工作过程8五、PLC控制方式8第二章电路设计9一、主线路9二、PLC控制及I/O分配9第三章软件设计12一、编程工具12二、梯形图如下13三、指语句令表15第四章整机调试18一、手动控制过程18二、自动运行控制过程18总结19致谢20参考文献21题目:模具注塑机机械手控制电路设计作者:王家欢【摘要】机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
机械手按驱动方式可分为液压式、气动式、电动式和机械式机械手。
本文设计的机械手属于混合式机械手 ,它综合了电动式和气动式机械手的优点 ,既节省了行程开关和 PLC的 I/O 端口 ,又达到了简便操作和精确定位的目的。
【关键字】气动机械手、注塑机机械手、机械手控制电路设计、PLC控制Mold injection molding machine manipulator control circuit designAuthor: Wang JiaHuan【Abstract】The robot is a mechanized and automated production process developed a new type of device. In the modern production process, the mechanical hand has been widely used in automatic production lines, robots have become the hi-tech development and production of neighborhood and quickly made up a Hall of emerging technology, it is even more to promote the development of mechanical hands, making robot better able to achieve with the combination of mechanization and automation. Although the robot is not as flexible as staff, but it has to repeat the work and labor, I do not know fatigue, not afraid of danger, the power of lifting a heavy object larger than manual force characteristics, therefore, mechanical hand has been of great importance to many sectors, and Yue Lai has been applied more widely.Robot technology related to mechanics, mechanics,electrical hydraulic technology, automatic control technology,sensor technology and computer technology and other fields of science, is a cross-disciplinary integrated technology.Robot is a kind of positioning control can be automated and can be re-programmed to change in multi-functional machine, which has multiple degrees of freedom can be used to carry an object in order to complete the work in different environments.Robot-driven approach can be classified according to hydraulic, pneumatic, electric and mechanical manipulator. This design belongs to a hybrid robot manipulator, which combines electric and pneumatic manipulator benefits, saving the trip switch and the PLC, I / O ports, but also to achieve a simple operation and precise positioning purposes.【Keywords】pneumatic manipulator, injection molding machine manipulator, manipulator control circuit design, PLC control前言引言机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
注塑机机械手故障及解决方法嘿,你问注塑机机械手故障及解决方法呀?这可有的聊了。
咱先说说常见的故障哈。
有时候机械手可能会不动作,哎呀,这可急人呢。
有可能是电源没接好,你得检查检查电线有没有插紧,开关有没有打开。
要是都没问题,那可能是控制系统出毛病了。
这时候就得找专业的人来看看,或者自己翻翻说明书,看看能不能找到解决办法。
还有啊,机械手可能会出现动作不准确的情况。
比如说该抓的东西没抓住,或者放的位置不对。
这可能是传感器出问题了,传感器就像机械手的眼睛,要是它不好使了,那机械手就瞎抓瞎放啦。
你可以检查一下传感器有没有被灰尘或者杂物挡住,清理清理说不定就好了。
再一个常见的故障是机械手的夹爪松不开或者夹不紧。
这要是在关键时刻,那可耽误事儿。
夹不紧可能是夹爪的力量不够,你可以调整一下夹爪的压力。
松不开呢,可能是卡住了,看看有没有东西卡在夹爪里面,或者是机械结构出问题了,这也得好好检查检查。
要是机械手出现抖动的情况呢,那也挺让人头疼。
这可能是机械部分有松动,或者是电机有问题。
你可以检查一下各个螺丝有没有拧紧,电机有没有过热。
要是电机过热,就让它休息一会儿,降降温。
我给你讲个事儿吧。
有一次我在工厂里看到一台注塑机机械手出故障了,它老是抓不住东西。
工人们都很着急,因为这会影响生产进度。
后来来了个老师傅,他检查了一下传感器,发现上面有一些塑料屑挡住了。
他把塑料屑清理掉,机械手就又能正常工作了。
大家都松了一口气,赶紧继续干活。
所以啊,要是注塑机机械手出故障了,别慌,先冷静下来,仔细检查一下可能出现问题的地方。
要是自己解决不了,就赶紧找专业的人来帮忙。
这样才能让机械手尽快恢复正常,不耽误生产。
加油哦!。
赖控制系统来达到。
在控制系统的指挥下,机械手按照预定的工作程序完成各个动作,从而将注塑生产出的制品从模具中取出并传送到指定地点或下一个生产工序中,并向模腔中喷洒脱模剂。
在设计时,应根据注塑机的性能,机械手的作业条件和要求,制品的形状和重量等来确定控制系统。
一般来说,设计或选用控制系统应遵循以下一些要点:(1)应确保机械手有足够的定位精度;(2)应注意机械手与注塑机的动作配合协调,确保机械手抓取制品离开模具后,注塑机和机械手能够各自继续进行动作,从而减少时间浪费;(3)应注意控制机械手的运行速度,即要使机械手能够满足注塑成型最短周期的要求,有要考虑是否会产生惯性冲击和振动;(4)应考虑控制系统的费用与实际工作要求之前的平衡关系。
工作步骤注塑用机械手在抓取制品及喷洒脱模剂时一般采用如下的工作步骤:机械手手臂下降并引发注塑机开模-注塑机顶出注塑制品并向机械手发出顶出信号一机械手伸入模腔中抓取制品-机械手向模腔喷洒脱模剂一机械手上升离开模腔一机械手向注塑机发出闭模信号并引发注塑机闭模—机械手移动到指定位置处放下制品一机械手回复到原位准备进行下一次动作。
编辑本段五、技术参数注塑用机械手的技术参数确定机械手的规格和工作性能,主要的技术参数有以下几点:抓重:机械手抓取制品的额定重量或载荷手臂的运动参数包括手臂的伸缩,升降,回转等运动速度和范围;手部的抓取范围及抓取力的大小;定位精度:位置的设定精度和重复定位精度;定位方式:点位控制或连续轨迹控制方式;驱动系统参数:控制系统参数;机械手的工作循环时间;自由度数目和坐标形式等。
编辑本段六、发展趋势由于注塑机专用机械手能够大幅度的提高生产率和降低生产成本,能够稳定和提高注塑产品的质量,避免因人为的操作失误而造成的损失。
因此,注塑机械手在注塑生产中的作用变得越来越重要。
目前国内的机械手类型比较简单,且大都用于取件。
随着自动化技术的发展,目前全伺服马达驱动的注塑机械手,可以实现除取件外得其他功能,比如模内贴标、模内镶嵌、装箱、码货等更多功能;或许以后,还有更多的机械手用于上料、混合、自动装卸模具、回收废料等各个工序上,而且将朝着智能化方向发展。
注塑机机械手工作原理
注塑机机械手是一种用于自动化注塑生产的设备,它主要由机械臂、控制系统以及相关传动装置组成。
机械手的工作原理是通过控制系统对其进行程序编制,实现对注塑机的操作。
首先,控制系统会接收到相关信号,并将其转化为机械手的动作指令。
然后,机械臂通过传动装置进行动作执行。
在工作过程中,机械手一般要完成以下几个基本操作:
1. 取料:机械手根据程序指令定位,将注塑机旁边的原料箱中的物料取出,并将其传送到注塑机的进料口。
2. 开合模:机械手可以根据程序指令控制模具的开合动作,使其完成产品的注塑成型。
3. 取出产品:在注塑成型完成后,机械手会根据程序指令准确地将成品从注塑模具中取出,并将其放置到适当的位置。
4. 剪断和清理:对于一些需要剪断或清理的产品,机械手还可以进行相关的操作,确保产品质量。
5. 疏料排出:如果注塑过程中产生了废料或不合格品,机械手会将其排出,以保持生产区域的整洁。
机械手的工作原理依赖于高精度的控制系统,能够根据预设的
参数和指令,准确地完成各项操作。
它的应用使得注塑生产过程更加高效、精准,提高了生产效率和产品质量。
注塑机机械手调试导言注塑机机械手是现代注塑成型生产线中重要的自动化设备,其主要作用是在注塑机生产过程中,对注塑成型好的产品进行取料、放料、堆叠等操作。
在使用注塑机机械手前,需要对其进行调试,保证机械手的正常运行和工作效率。
本文将介绍注塑机机械手调试的步骤和注意事项。
步骤1. 确定机械手安装位置在调试注塑机机械手之前,需要确定机械手的安装位置。
通常,机械手应该安装在注塑机的一侧,便于取料、放料等操作。
安装位置应尽量避免与注塑机和其他设备的干涉,以确保机械手正常运行。
2. 连接电源和通信线路接下来,将机械手的电源和通信线路与注塑机或控制系统连接。
确保电源和通信线路连接正确,以避免后续调试出现问题。
3. 开机和初始化接通机械手的电源后,按照机械手的操作手册进行开机和初始化操作。
通常情况下,机械手控制器会完成一些自检和校准操作,确保机械手处于正常的工作状态。
4. 调试运动轨迹调试机械手的运动轨迹是非常重要的一步。
通过调整机械手控制器上的相关参数,可以使机械手在规定的运动范围内进行精确的移动。
在调试运动轨迹时,需要注意以下几点:•确保运动轨迹与注塑机的生产节奏相匹配,以确保机械手可以在合适的时间点进行取料、放料等操作。
•注意机械手的移动速度和加减速度,确保机械手的运动平稳,避免产生震荡或影响注塑机的正常生产。
5. 调试取料和放料功能在注塑机生产过程中,机械手的主要任务是进行取料和放料操作。
因此,调试机械手的取料和放料功能是非常关键的一步。
在调试取料和放料功能时,需要注意以下几点:•确保机械手可以准确地捕捉产品,并放置在指定的位置。
调整机械手的抓取力度和抓取方式,以适应不同类型产品的取料和放料需求。
•调试产品的堆叠方式和位置,确保产品堆叠整齐、稳定,并符合规定的堆叠高度和数量要求。
6. 验证机械手的稳定性和精度完成以上步骤后,需要验证机械手的稳定性和精度。
通过让机械手进行连续的取料和放料操作,观察机械手的运动轨迹和动作的准确性。
注塑机机械手注塑机、机械手设备(注塑机/机械手)二次维护作业指导书主办单位:人力资源部课程讲师:xxxxxxxxxx注塑机的二次维护一.所用物料:碎布、布手套、胶手套使用的工具:测量仪器、万用表、油枪、各种扳手、镙线刀、各类钳子三、操作步骤及内容:1、操作步骤:检查润滑系统→ 检查机械部分→ 检查油路系统→ 检查电气系统2操作内容:(1)检查润滑系统:A.每周检查机械铰链的润滑系统,打开前后安全门,手动操作控制板,注油3-4分钟,并观察每个活动接头是否有润滑油流出(如果有一处油管堵塞,而看不到油流出,则应紧急修复);b.每周检查锁模活动板,杯司铜与哥林柱活动行程是否有润滑油附于表面,每隔一周注一次新油,注油时发现该部位新油有微量流出即可;c.每周检查射台前后板,杯司铜与导柱活动行程润滑油是否附于表面,每周注油一次;d.日本住友机每月在相应活动关节注油咀注油一次,润滑射台道轨,熔胶传动轴轴承,必须使用厂商(注塑机厂家)指定或提供专用润滑油,各种机台每月用水平尺对机台的水平度进行测试;(2)检查机械系统:A.每周检查机械铰链是否磨损。
锁模高压时,将机械铰链拉直,观察钢秘书内孔与铰链边缘是否同心,并根据磨损情况决定修理或更换。
每周检查机器各活动接头的螺丝是否松动或有异响。
检查应采用视觉和听觉方法进行;b、每月根据机器生产中使用的橡胶材料和时间(5-6个月)打开料桶,检查料桶和螺杆,检查螺杆的橡胶头是否磨损和损坏。
根据机器使用5-6个月的塑料(如工程材料)取出橡胶头进行检查,并根据情况决定更换或修理;生产透明材料的机器是一种特殊机器。
如果有黑点,必须拆下螺杆进行清洁。
当机器转为彩色以生产透明材料时,必须清洁机筒和螺杆;(3)检查油路系统:a.每周检查油泵,正常油泵在0―14kg/cm2压力状态下油泵无噪音,压力表指针在刻度上很稳定,不正常油泵不噪音,压力表指针很不稳定有震动,机台工作6个月需清洗油筛;b.每周用手触摸或用测温器对各动作液压/冷却器进行感温与测温,正常冷却器用手感觉冷却器进油管油温较热,回油管油温较冷,不正常冷却与回油管油温一样热,每6个月需清洗冷却器,清洗时将冷却器两端拆开,用铜条及清洗液进行清洗;c.每周检查系统压力,正常系统压力0―14kg/cm2,放大板输出电流最大为0.7a,压力大小与电流成正比,一年以上的机台每年应更换液压油一次,新机台半年更换液压油一次.(4)检查电气系统:A.每周检查电气箱内电路,首先切断电源开关,打开电气箱门,用高压气枪吹净内部灰尘,用软布擦拭电气箱底部和电路板,检查电路是否损坏或脱落,接头是否松动,用螺丝刀加固,重新排列和校正电路,避免短路和断路;b、每周检查一次电源箱内温度是否太高(35+5度),以避免影响电脑元件的正常操作,检查电箱排风扇运转排气状况;c.每月检查机台外部线路护线套有无损伤,老化需重新整理或更换电线套.机械手的二次维修一.所用物料:碎布、布手套、胶手套使用的工具:测量仪器、万用表、油枪、各种扳手、镙线刀、各类钳子三、操作步骤及内容:1、操作步骤:检查伺服电机→ 检查气缸→ 检查真空发生器系统→ 检查缓冲区→ 检查电路2运行内容:(1)检查伺服电机:每周目视检查伺服电机与轨道是否同步并联运行,目视检查传动链是否松动,正常运行原点是否能正常复位,异常原点恢复工作时报警;(2)检查气缸:每周检查气缸有无漏气,气管有无老化漏气,正常气缸运行速度快,不正常运行缓慢,气压减小,这时须更换气管与接头.(3)检查系统真空发生器:每周检查真空发生器,正常吸力达6―7kg,产品吸到位而不会脱落,不正常吸力达不到6―7kg,吸力不稳定,运行中出现报警,须检查吸盘,清洗真空发生器.(4)检查缓冲器:每半个月用手触摸一次,检查缓冲器是否漏油或弹性不足。
注塑机机械手用气量计算公式英文回答:To calculate the air consumption of an injectionmolding machine robot, you can use the following formula:Air Consumption (L/min) = (Cycle Time (sec) x Air Pressure (bar) x Cylinder Area (cm²)) / 60。
Let's break down the formula and explain each component:1. Cycle Time: This refers to the time it takes for the robot to complete one full cycle of operation, including picking up the molded part, moving it to the desired location, and releasing it. For example, if the cycle timeis 10 seconds, you would use this value in the formula.2. Air Pressure: This is the pressure at which the airis supplied to the robot. It is usually measured in bars. For instance, if the air pressure is 6 bars, you would usethis value in the formula.3. Cylinder Area: This refers to the cross-sectional area of the robot's pneumatic cylinder that is responsible for the movement. The cylinder area can be calculated by measuring the diameter of the cylinder and using the formula: Cylinder Area (cm²) = (π x Cylinder Diameter²) /4. For example, if the cylinder diameter is 5 cm, you would calculate the cylinder area and use that value in the formula.Once you have the values for cycle time, air pressure, and cylinder area, you can plug them into the formula to calculate the air consumption in liters per minute.Let's say we have a robot with a cycle time of 10 seconds, an air pressure of 6 bars, and a cylinder area of 15 cm². Using the formula, we can calculate the air consumption:Air Consumption (L/min) = (10 sec x 6 bars x 15 cm²) / 60。
注塑机械手安装气剪教程
1.相邻两台注塑机中机械手的安装方向要明确。
2.所有的动作和运动都不妨碍注塑机安全门的开启和关闭。
3.机械手的所有直线、旋转等动作均可现场设定,并可在一定误差范围内设定。
一旦超过设定值的误差,会及时报警并停止动作,并在触摸屏上显示其故障信息。
4、注塑机或机械手出现故障时,注塑机和机械手会互锁。
即机械手出现故障时注塑机会停止操作;同样在注塑机出现故障时,机械手也会停止动作。
5.Arm具有防碰撞功能:发生误操作时,程序具有自动防碰撞功能,可根据电机的扭矩自动判断并停止动作,最大限度减少损失。
6.机械手与注塑机的动作是一致的,即不会与注塑机的动作发生碰撞或干涉,也不会因为机械手的动作而过度延长注塑机的生产周期。
7、注塑机出现停机时(故障停机、正常停机、更换模具、设备保养等),可以手动将机械手置于安全位置或其他必要的位置;不会妨碍更换模具和设备维修作业。
8.机械手出现故障时(如不到位、产品未取出、产品脱落等。
),它会立即报警停机,将其故障显示在触摸屏上,方便快速排除。
9.一些产品要求机械手包括脱模剂喷涂系统。
喷射脱模剂可以在开模后准确的喷入型腔内(喷嘴角度可调),且用量可调,可设定喷涂频率。
10、即所有参数和数据的设置可以通过电脑进行设定和修改,然后下传到机械手系统上执行,也可以在机械手上直接设定参数和数据。
注塑机机械手注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;能够模仿人体上肢的部分功能,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。
提高注塑成型机的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到及其重要的作用。
一、注塑机械手分类在注塑工业中适用的机械手按其智能程度可以分为以下两种类型:1、基本型注塑机械手:该类型机械手一般包括固定模式程序和按生产工艺需求的教导模式程序。
固定模式程序涵盖了目前注塑生产的几种标准工艺,利用工业控制器来做简单、规则和重复的动作。
教导模式程序是特意为生产工艺特殊的注塑机适用,通过把基本动作的有序而安全的编排达到成功取物的目的。
2、智能型注塑机械手:该类型机械手一般包括多点记忆置放、任意点待机、较多自由度等功能,一般采用伺服驱动,能够进行最大限度的仿人执行比较复杂的操作,还可以通过配备先进的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能。
二、日本注塑机机械手发展趋势:由于注塑机专用机械手能够大幅度的提高生产率和降低生产成本,机械手能够稳定和提高注塑产品的质量,机械手避免因人为的操作失误而造成的损失。
因此,注塑机械手在注塑生产中的作用变得越来越重要。
目前国内的机械手类型比较简单,且大都用于取件。
随着注塑成型工业的发展,以后将有越来越多的机械手用于上料、混合、自动装卸模具、回收废料等各个工序上,而且将朝着智能化方向发展。
三、市场注胶机械手的品牌德国:肖根福罗格(Scheugenpflug)、RAMPF、Sonderhoff等美国:EFD、飞士能、Asymtek、CAMALOT 等亚洲:韩国MARO、特盈自动化、世椿、武藏MUSASHI、IEI、LILE、等中国:深圳世椿、厦门特盈自动化、昆山沃椿、深圳奥松、广州大创等等四、注塑机如何配置机械手大型横走机配置和用途:1.大型横走械手系列适用于350~4000顿的各型卧式射出成型机的成品及水口取出.2.手臂形式有单截式和双截式;上下行程从1200~3000mm.可增加副臂用于三片模,同时夹成品与水口.3.横行轴标准为变频马达驱动(也可根据实际需要来选购AC伺服马达驱动).4.上下,引拔为气缸驱动,节省成本.成品臂上下轴可根据需要选购AC伺服马达驱动,增加模内的取出效率.5.安装机械手可以提高产能(20~30%),降低产品的不良率和精准的控制生产量.6.可保障操作人员的安全性,减少浪费.机体结构:1.横行轴标准采用变频马达驱动,也可以选购AC伺服马达驱动,定位精度可达±0.1mm.2.上下及引拔轴标准使用气缸驱动,正臂上下可选购AC伺服马达驱动,横行\引拔\上下均使用精密直线高刚性线性滑轨,耐磨耗寿命长.3.上下手臂使用质量轻高刚性的铝合金挤型结构梁,可达到取出速度快,震动小,高效能及使用寿命长的要求.模组化设计大量生产,零件互换性强.侧姿倒角机构可配合公模或母模取出,固定倒角90°.双截式手臂采用高刚性线性滑轨及铝合金结构梁,特殊设计的皮带倍速机构,大幅度的缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程.除了可以增加上下行的速度及稳定性,并且可配合厂房高度低的场所.选购功能:1.引拔电动调整:引拔位置,行程电动遥控调整,节省调整时间增加操作的安全性.2.上下电动调整行程:上下行程电动遥控调整,即可节省调整时间又可增加操作的安全性.3.横行轴数位控制:数位设定横行行程,可多点及循环置放成品,最多可放99点,用于排列成品.4.横行伺服马达驱动:横行轴可选用AC伺服马达驱动,并采用精密级行星减速机以皮带传动,速度快定位精准;定位精度达±0.1mm,可应用于需定位精准之取出.5.喷离型剂组:可以设定几模喷/每次喷多久/喷头可以装在手臂或模具上,最多可以设定两组.6.中板检测:应用于三板模时确认中板位置,避免副臂撞到模具.7.成品光电检测:放置成品于输送带上防止成品互撞.8.空压剪装置:可以安装于手臂上或横行端剪料头.9.模外置物慢速下行:可以避免撞伤操作人员.备注:此系列机型横行轴数位控制,横行伺服马达驱动,上下轴伺服马达驱动三种选购功能只能三选一.机体结构中型横走机械手:配置和用途:1. 中型横走机械手系列适用于80-600T的各型卧式射出成型机的成品及水口取出。
2. 手臂型式为双截式;可增加副臂用于三片模,同时夹成品与水口;上下行程从800-1200mm为气缸驱动。
3. 横行驱动方式:标准为变频马达驱动(可选购AC伺服马达驱动)。
4. 成品臂上下轴可依需要选购AC伺服马达驱动,增加模内的取出效率。
5. 机械手可以提高产能、降低产品的不良率和精准的控制生产量。
6. 保障操作人员的安全性、减少人工和浪费。
结构和功能:1. 横行轴采用变频马达驱动(也可以选购AC伺服马达驱动),上下及引拔使用气缸驱动。
2. 横行、上下手臂均采用进口的高刚性铝合金挤型梁配合高刚性精密线性滑轨,能达到取出速度快、高效能、高精度、使用寿命长的要求。
3. 双截式手臂采用特殊设计的皮带倍速机构,可缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程和配合厂房较低之场所。
4. 侧姿倒角机构可配合动模或定模取出和固定倒角90度。
5. 治具预留气压管路与检测讯号,预留一吸一抱两个回路,可供吸夹抱等治具的取出应用,可应用于各种成品多样化的取出。
6. 变频马达驱动横行轴采用进口高刚性精密线性滑轨,动作平稳.顺畅.耐磨和使用寿命长。
人性化设计:1. 控制系统对话式操作,可以切换中文或英文页面,操作简单和容易学习2. 8组内建标准程式和20组的模具记忆,可随意搭配使用,具备L/U型取出功能,并可搭配置物方式、侧姿选择和顶针设定等功能.3. 自动检测故障情况并自动记录.4. 可在定模方向取出,搭配各项侧姿动作,也可选择不同的置料方式(横出置料、横入置料和外侧同时置料)。
5. 所有的计时、计数均可在自动运转模式中修改。
6. 模组化的控制板设计,更换维修方便;重视与射出机的连结安全规范,所有与成型机的输入输出讯号都使用干接点讯号,以防止相互干扰。
7. 备用输出点可以连接其他自动化设备,如输送带和承接台等。
8. 可选购CE机型,符合EUROMAP 12 or 67与SPI的标准,并附有标准接口。
9. 可选购中板检测和置物安全检测等,避免副臂撞模,搭配全厂自动化使用。
10. 横行轴可选购AC伺服马达驱动,并采用精密级行星减速机和齿轮. 齿条传动,速度快.定位精准,定位精度高达±0.1mm。
选购配置:A.引拨行程和上下行程电动遥控调整,节省调整时间和增加操作的安全性。
B.成品臂上下轴由AC伺服马达驱动,可快速的上下行动作,节省模内取出时间,增加效率,并可在模外设置不同的置物高度,定位精度为±0.2mm。
C.模外置物慢速下行,可避免撞伤操作人员。
D.横行伺服马达、上下轴伺服马达驱动二种选购功能只能二选一。
轻型横走机械手配置和用途:1.轻型横走机械手系列适用于50~300T的各型卧式射出成型机的成品及水口取出。
2.单截式型号有LPL-Q550/Q650,双截式型号有LPL-Q750/Q850,上下行程从550~850mm,可用于三片模同时夹成品与水口。
3.横行驱动方式:气压驱动和变频马达驱动(可选购AC伺服马达驱动)。
4.机械手可以提高产能、降低产品的不良率和精准的控制生产量。
5.保障操作人员的安全性、减少人工和浪费。
结构和功能:1.横行轴采用无杆缸驱动或变频马达驱动(也可以选购AC伺服马达驱动),上下及引拔轴使用气缸驱动。
2.横行、上下手臂均采用进口的高刚性铝合金挤型梁与线性滑轨.配合高刚性轴承钢,能达到取出速度快、高效能、高精度、使用寿命长的要求。
3.双截式手臂采用特殊设计的皮带倍速机构,可缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程和配合厂房较低之场所。
4.侧姿倒角机构可配合动模或定模取出和固定倒角90度。
5.治具预留气压管路与检测讯号,预留一吸一抱两个回路,可供吸夹抱等治具的取出应用,可应用各种成品多样化的取出。
6.无杆缸驱动LPL-Q550/Q650横行轴采用进口无杆缸驱动,配合高刚性精密线性滑轨,动作平稳.顺畅.耐磨和使用寿命长,两端均采用气压缓行及油压缓行器,停止平稳。
人性化设计:1. 控制系统对话式操作,可以切换中文或英文页面,操作简单和容易学习2. 8组内建标准程式和20组的模具记忆,可随意搭配使用,具备L/U型取出功能,并可搭配置物方式、侧姿选择和顶针设定等功能.3. 自动检测故障情况并自动记录.4. 可在定模方向取出,搭配各项侧姿动作,也可选择不同的置料方式(横出置料、横入置料和外侧同时置料)。
5. 所有的计时、计数均可在自动运转模式中修改。
6. 模组化的控制板设计,更换维修方便;重视与射出机的连结安全规范,所有与成型机的输入输出讯号都使用干接点讯号,以防止相互干扰。
7. 备用输出点可以连接其他自动化设备,如输送带和承接台等。
8. 可选购CE机型,符合EUROMAP 12 or 67与SPI的标准,并附有标准接口。
9. 可选购中板检测和置物安全检测等,搭配全厂自动化使用。
10.横行轴可选购AC伺服马达驱动,并采用精密级行星减速机和齿轮. 齿条传动,速度快.定位精准;定位精斜臂式机械手配置和用途1. 斜臂式机械手系列适用于15~280顿的各型卧式射出成型机,用于取出两板模的成品及水口。
2. 型号有LPL~X450/X550/X650/X750/X850, 手臂形式有单截式和双截式;上下行程从450~850mm,专用于两板模具。
3. 单功能用于夹水口,全功能可以夹水口或同时夹水口与吸成品。
4. 机械手可以提高产能、降低产品的不良率和精准的控制生产量。
5. 保障操作人员的安全性、减少浪费。
结构和功能1.双截式手臂采用特殊设计的皮带倍速机构,可缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程,并且可配合厂房高度较低之场所。
2.左右旋转结构,方便调整置物方向,不需更换气管及磁簧开关。
3.夹具旋转机构,可以旋转90°放置成品及水口。
4.换模调整机构,换模时仅需将固定把手松开,全机可旋转90°,提升换模效率。
5.全机采用铝合金精密铸造,搭配精密加工,整机稳固可以承受高速运动,耐久使用。
6.上下手臂采用进口的高刚性线性滑轨,引拔采用质量轻高刚性铝合金挤型梁配合线性轴承及高刚性轴承钢,能达到取出速度快、高效能、高精度、使用寿命长的要求。
人性化设计1. 控制系统对话式操作,可以切换中文或英文页面,操作简单和容易学习。