全站仪三角高程测量及计算公式
- 格式:doc
- 大小:47.00 KB
- 文档页数:2
SHANXI WATER RESOURCES全站仪隔点自由设站三角高程测量法应用王金花(山西省漳泽水库管理局,山西长治046021)[摘要]高程测量一般采用水准仪水准测量法,它具有精度较高、操作简单的优势,但外业工作量大、作业速度慢。
在采用全断面隧洞掘进机(TBM )进行隧洞开挖过程中,经常对洞轴线与洞底高程进行复测,特别是在高差较大且测程较短的区域进行作业,采用水准仪测量工作效率很低。
采用全站仪三角高程测量法可大大提高工作效率,减少测量环节和误差,提高了测量精度。
[关键词]全站仪隔点自由设站;三角高程法;隧洞测量[中图分类号]P216[文献标识码]C[文章编号]1004-7042(2018)04-0042-02在工程建设中,高程测量一般采用水准仪水准测量法,它具有精度较高、操作简单的优势,但由于这种方法外业工作量大、作业速度慢,特别是在高差较大且测程较短的区域进行作业,工作效率很低。
而全站仪三角高程测量法的优缺点正好与水准测量法互补,在精度要求较低的情况下,采用全站仪三角高程测量法可大大提高工作效率。
随着全站仪的普及,全站仪三角高程测量方法被广泛应用,在实际操作中通常是将全站仪先架设在已知高程点上,直接测量未知点或转站高程传递测量。
对转站高程传递测量,若测量线路比较长,转站数量比较多,比如导线三角高程测量,必须得量取各测站仪器高及各镜站棱镜高,测站越多由此产生的量取误差就积累越大,随之精度也大大降低。
经过长期实践,采用全站仪隔点自由设站的三角高程测量方法,设站自由方便,作业速度快;又不需要量取测站仪器高和中间镜站棱镜高而减少量取误差的积累,可进一步提高测量精度。
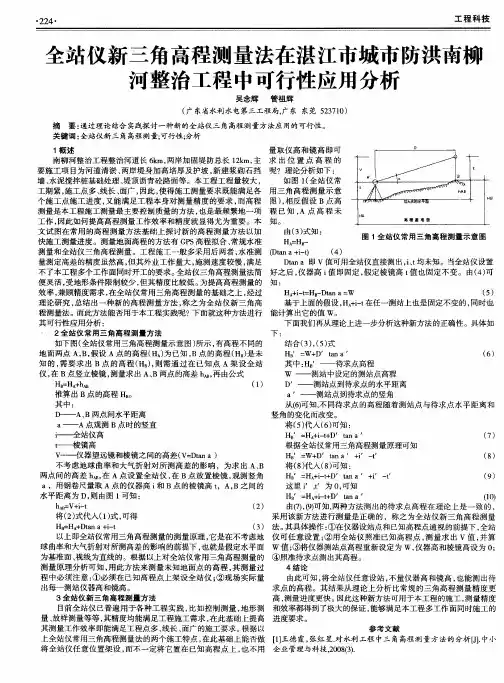
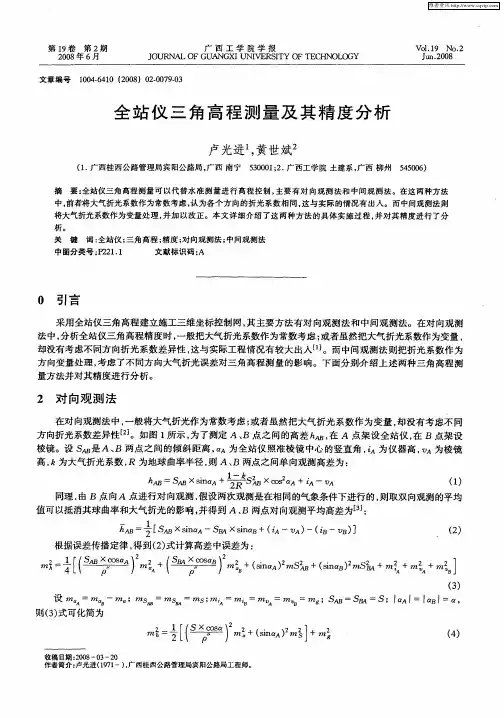
1全站仪已知高程点设站法的三角高程测量在O 点设站,观测A 点,两点间的高差计算见公式(1):h OA =S A cosZ A +1-K 2R(S A sinZ A )2+I-V A(1)式中:h OA ———经气象、加常数和乘常数改正计算后,测站O 点与镜站A 点间的高差,m ;S A ———经改正后的测站O 点与镜站A 点间斜距,m ;Z A ———测距时的天顶距,°;I ———测距时的仪器高,m ;V A ———测距时镜站A 点的棱镜高,m ;K ———大气折光系数,在0.08~0.14之间或实测确定,由于同一测站观测区域范围较小,可认为是在相近条件下进行观测,则取K=K A =K B ;R ———测区地球曲率半径或取平均曲率半径6369000m 。
简析三角高程测量新方法原理三角高程测量是工程施工中传递高程的一种基本的测量方法,由于传统的三角高程测量精度不仅受大气折光、垂直角观测精度等因素影响,更重要的是受量取仪器的高度产生的垂线偏差因素影响,故在施工单位中使用并不广泛,随着几何水准测量的发展,几何水准测量成为了精密高程控制的主要方法,而使传统的三角高程测量只是在一些特殊情况下(如山区、丘陵区等高差较大地区)的几何水准测量的补充。
近几年,随着国内高速铁路大规模的建设,而高速铁路多设计为高架路段,桥梁工程所占比例在70%以上,有的桥长达几十公里,要保证桥上的无砟轨道高程定位精度达到±1mm,如何将地面上的高程精确地引测到十几米高的桥面上,这是施工单位所必须要解决的测量难题。
根据无砟轨道施工精度要求,桥上每2km左右应引测一个二等水准点,若采用精密几何水准测量法,不仅实施难度非常大且精度也难以保证,而传统的三角高程测量虽然现场实施较简单,但是受大气折光、垂直角及垂线偏差等因素影响,就很难满足精度要求。
要实现把地面上的高程高精度地引测至桥上,若采用三角测量方法,关键是要消除仪器高度产生的垂线偏差的影响。
三角高程测量新方法的原理新方法的原理:就是全站仪任意点设站,后视地面上已知的高程控制点,前视待测高程点,设定前后视点上的棱镜高度一致,在测量过程中不需要量取仪器高和棱镜高,测量完成后推算出待测点的高程。
A点为地面已知高程点,B点为待求高程点,为了测量A点与B点间高差,在中间位置设立全站仪,A点与B点处分别安置等高棱镜组,利用三角高程测量原理可得(暂不考虑大气折光因素):HA+V-△h1=HB+V-△h2则A点与B点间高差△HA-B为:△HA-B=HB-HA=△h2-△h1 (1)由上式可知,A点与B点间高差已自行消除了仪器高和棱镜高,故影响三角高程测量精度的一个重要因素就消除了。
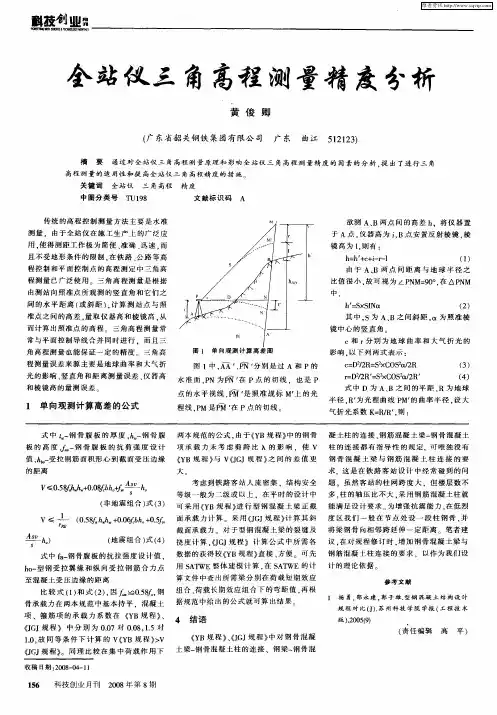
三角高程测量新方法的计算公式及精度分析1、单向观测三角高程测量高差的计算公式:(2)或:(3)式中 -------------三角高程测量的高差;-------------全站仪至棱镜的斜距;--------------全站仪至棱镜的平距;--------------垂直角;---------------全站仪高度;--------------棱镜高;-------------地球平均曲率半径,约为6370km;-------------大气垂直折光系数,根据实际情况一般取0.08~0.14;2、单向观测三角高程测量高差的误差计算公式:(4)因新方法中是不需要量取仪器高和棱镜高的,故不存在仪器高和棱镜高的误差的,则式(4)可变换为:(5)3、测量精度分析:由式(5)可知,单向观测三角高程测量高差的误差只与距离、垂直角的误差和两气差有关,因此A点与B点间的高差计算公式为:(6)或:(7)由上式可推导出A点与B点的高差误差公式为:(8)单向观测三角测量误差分析如下:采用测角精度2"、测距精度2mm±(2*D)ppm全站仪和带气泡的对中杆棱镜组进行三角高程测量时,即、,控制测距在250m以内,垂直角在28°以内,球气差误差一般按()进行计算,則可达到三、四等水准精度(三等为,四等);若采用测角精度1"、测距精度1mm±(1*D)ppm全站仪、强制归心安装精密棱镜组,进行三角高程测量时,控制测距在100m之内、垂直角在25°以内,则可达到二等水准精度,即三角高程测量新方法的应用石武客运专线河北段,大部分路段为高架桥,架梁后桥面与地面的平均高差在20m左右,而根据无砟轨道施工要求,每2km一处应从地面高程控制点引测至桥面上。
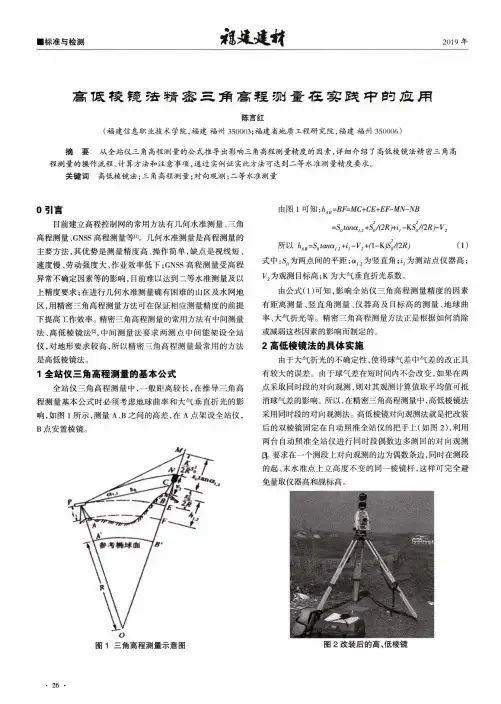
■标准与检测2019年富低稜競法精密三角高程测量在实踐中的应用陈言红(福建信息职业技术学院,福建福州350003;福建省地质工程研究院,福建福州350006)摘要从全站仪三角高程测量的公式推导出影响三角高程测量精度的因素,详细介绍了高低棱镜法精密三角高程测量的操作流程、计算方法和注意事项,通过实例证实此方法可达到二等水准测量精度要求。
关键词高低棱镜法;三角高程测量;对向观测;二等水准测量0引言目前建立高程控制网的常用方法有几何水准测量、三角高程测量、GNSS高程测量等叫几何水准测量是高程测量的主要方法,其优势是测量精度高、操作简单,缺点是视线短、速度慢、劳动强度大、作业效率低下;GNSS高程测量受高程异常不确定因素等的影响,目前难以达到二等水准测量及以上精度要求;在进行几何水准测量确有困难的山区及水网地区,用精密三角高程测量方法可在保证相应测量精度的前提下提高工作效率。
精密三角高程测量的常用方法有中间测量法、高低棱镜法叫中间测量法要求两测点中间能架设全站仪,对地形要求较高,所以精密三角高程测量最常用的方法是高低棱镜法。
1全站仪三角高程测量的基本公式全站仪三角高程测量中,一般距离较长,在推导三角高程测量基本公式时必须考虑地球曲率和大气垂直折光的影响,如图1所示,测量A、B之间的高差,在A点架设全站仪, B点安置棱镜。
由图1可知:h*B=BF=MC+CE+EF-MN-NB=S o tana l2+S0/(2R)+ij-¥l S0/(2R)-V2所以h A B=S0tana L2+i l~V2+0)(1)式中:So为两点间的平距;a,2为竖直角禹为测站点仪器高;匕为观测目标高;K为大气垂直折光系数。
由公式(1)可知,影响全站仪三角高程测量精度的因素有距离测量、竖直角测量、仪器高及目标高的测量、地球曲率、大气折光等。
精密三角高程测量方法正是根据如何消除或减弱这些因素的影响而制定的。
2高低棱镜法的具体实施由于大气折光的不确定性,使得球气差中气差的改正具有较大的误差。
全站仪三角高程的高差计算公式全站仪三角高程测量是一种常用的测量地面点高程的方法,而其中的高差计算公式可是关键所在。
咱先来说说全站仪三角高程测量到底是咋回事。
想象一下,你站在一个地方,拿着全站仪,对着另一个你想知道高程的点瞄啊瞄。
这中间就涉及到很多角度和距离的测量。
在全站仪三角高程测量中,高差计算公式就像是一个神秘的密码,能帮咱们解开两个点之间高程的差异。
那这个神秘的高差计算公式到底是啥呢?它通常可以表示为:$h = D \times \tan\alpha + i - v$ 。
这里面的“h”就是咱们要找的高差啦,“D”呢是两点之间的水平距离,“α”是观测的竖直角,“i”是仪器高,“v”是目标高。
给您讲讲我之前在实际工作中的一次经历。
那次我们要测量一个山坡上几个点的高程,这山坡可不好爬,杂草丛生的。
我带着全站仪吭哧吭哧地就上去了,心里想着可一定要把这测量任务完成好。
我小心翼翼地架好仪器,认真地瞄准目标点,测量出水平距离、竖直角,然后按照高差计算公式算高差。
可一开始,我把仪器高和目标高弄混了,结果算出来的高差那叫一个离谱。
我就纳闷了,咋和预想的差这么多呢?后来仔细一检查,哎呀,原来是这个小细节出错啦。
重新测量计算之后,终于得到了准确的高差,那一刻心里别提多有成就感了。
在实际应用这个公式的时候,有几个要点得特别注意。
首先就是测量数据要准确,哪怕有一点点偏差,算出来的高差可能就差之千里。
比如说测量水平距离,得保证仪器的精度,测量的时候要稳稳的,不能手抖。
还有竖直角的测量,要精确瞄准,可不能马虎。
另外,仪器高和目标高的测量也不能马虎。
仪器高就是全站仪望远镜轴中心到地面点的垂直距离,测量的时候要量准。
目标高呢,就是目标点上的标杆或者反射棱镜的中心到地面点的垂直距离。
总之,全站仪三角高程的高差计算公式虽然看起来不复杂,但要想用好它,得到准确的高差,就得在测量过程中一丝不苟,认真对待每一个数据。
就像我那次在山坡上的测量,如果不是后来仔细检查纠正错误,这测量结果可就没法用啦。
随着社会的进步,使用跟踪杆配合全站仪测量高程的方法越来越普及,而传统的三角高程丈量方法已经显示出了局限性。
经过临时摸索,总结出一种新的方法进行三角高程丈量。
这种方法既结合了水准丈量的任一置站的特点,又减少了三角高程的误差来源,同时每次丈量时还不必量取仪器高、棱镜高。
使三角高程丈量精度进一步提高,施测速度更快。
工程的施工过程中,经常涉及到高程丈量。
保守的丈量方法是水准丈量、三角高程丈量。
两种方法虽然各有特色,但都存在着不足。
水准丈量是一种直接测高法,测定高差的精度是较高的但水准丈量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程丈量是一种间接测高法,不受地形起伏的限制,且施测速度较快。
大比例地形图测绘、线型工程、管网工程等工程丈量中广泛应用。
但精度较低,且每次丈量都得量取仪器高,棱镜高。
比较麻烦并且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用保守的三角高程丈量方法已经显示出了局限性。
经过临时摸索,总结出一种新的方法进行三角高程丈量。
这种方法既结合了水准丈量的任一置站的特点,又减少了三角高程的误差来源,同时每次丈量时还不必量取仪器高、棱镜高。
使三角高程丈量精度进一步提高,施测速度更快。
一、三角高程丈量的激进方法如图一所示,设AB为地面上高度不同的两点。
已知A点高程HA 只要知道A点对B点的高差HA B即可由HB=HA +HA B得到B点的高程HBD为AB两点间的水平距离;α为在A点观测B点时的垂直角;i为测站点的仪器高,t为棱镜高;HA 为A点高程,HB为B点高程;V为全站仪望远镜和棱镜之间的高差(V=Dtanα)首先我假设AB两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hA B可在A点架设全站仪,B点竖立跟踪杆,观测垂直角α,并直接量取仪器高i和棱镜高t若AB两点间的水平距离为D则hA B=V+i-t故 HB=HA +Dtanα+i-t1这就是三角高程丈量的基本公式,但它以水平面为基准面和视线成直线为前提的因此,只有当AB两点间的距离很短时,才比较准确。
全站仪三角高程的高差计算公式在测量工作中,全站仪三角高程测量是一种常用的高程测量方法。
它具有操作简便、效率高、精度能满足一定要求等优点,在地形起伏较大的地区应用广泛。
要准确进行全站仪三角高程测量,就必须掌握其高差计算公式。
首先,我们来了解一下全站仪三角高程测量的基本原理。
全站仪三角高程测量是通过测量两点之间的水平距离、垂直角以及仪器高和目标高,来计算两点之间的高差。
其高差计算公式的推导基于几何原理。
假设我们有 A、B 两点,A点为测站点,B 点为观测点。
在 A 点安置全站仪,测量出 A 点到 B 点的水平距离 D(也就是斜距在水平面上的投影),以及在 A 点观测 B点时的垂直角α(通常观测的是天顶距,然后通过 90 度减去天顶距得到垂直角)。
同时,我们还需要知道 A 点的仪器高 i 和 B 点的目标高 v。
那么,全站仪三角高程测量的高差计算公式可以表示为:h =D × tanα + i v + f其中,h 表示 A、B 两点之间的高差;D × tanα 这一项称为“直觇高差”,它是通过水平距离和垂直角计算得到的高差;i 是A 点的仪器高,即全站仪横轴中心到测站点地面的高度;v 是 B 点的目标高,即观测目标点的标志中心到地面的高度;f 则是球气差改正数。
接下来,我们详细说一说球气差改正数 f。
由于地球曲率和大气折光的影响,实际测量得到的高差与理论高差之间存在差异,这个差异就需要通过球气差改正来消除。
球气差改正数 f 的计算公式为:f = 043 × D²/ R其中,R 为地球平均曲率半径,一般取值为 6371km。
在实际测量中,如果两点之间的距离较短,球气差的影响较小,可以忽略不计。
但当距离较长时,忽略球气差改正会导致较大的误差。
再说说仪器高 i 和目标高 v 的测量。
仪器高的测量通常是使用小钢尺从全站仪横轴中心量至测站点地面标志点。
目标高的测量则是从观测目标点的标志中心量至地面。
全站仪三角高程测量流程一、引言全站仪是一种高精度的测量仪器,广泛应用于土木工程、建筑工程和测量工程等领域。
在实际测量中,三角高程测量是全站仪的常用功能之一。
本文将介绍全站仪三角高程测量的流程,包括准备工作、测量操作和数据处理等内容。
二、准备工作1. 确定测量范围:根据实际需要,确定测量的区域范围,并进行必要的勘测和标志设置。
2. 设置全站仪:将全站仪安装在稳固的三脚架上,并进行水平调平和垂直调准。
3. 设置参考点:选择一个稳定的点作为基准点,并进行标志和记录。
三、测量操作1. 设置测站:选择一个适合的测站点,将全站仪准确对准目标点。
2. 观测目标点:使用全站仪的望远镜对目标点进行观测,并记录观测数据,包括水平角和垂直角。
3. 移至下一个测站点:根据需要,移动全站仪至下一个测站点,并重复步骤2,将所有目标点都进行观测。
四、数据处理1. 计算水平角:根据观测数据,使用全站仪的内置程序或专业测量软件,计算各个目标点的水平角。
2. 计算垂直角:根据观测数据,计算各个目标点的垂直角。
3. 计算高程差:根据测站点的基准点和各个目标点的观测数据,计算各个目标点的高程差。
4. 计算三角高程:根据测站点的高程和各个目标点的高程差,计算各个目标点的三角高程。
5. 数据校正:对测量数据进行校正,包括仪器误差的校正和大气条件的校正等。
6. 数据输出:将测量结果输出为报告或数据文件,以便后续的分析和应用。
五、注意事项1. 在测量过程中,要注意仪器的精度和稳定性,保证测量结果的准确性。
2. 测量时要避免遮挡物,确保目标点的清晰可见。
3. 在计算过程中,要仔细检查和核对数据,避免计算错误。
4. 在数据处理过程中,要注意单位的一致性,避免单位转换带来的误差。
5. 在数据输出时,要按照规范的格式和要求进行,确保结果的可读性和可用性。
六、总结全站仪三角高程测量是一种常用的测量方法,通过全站仪的精确观测和数据处理,可以获得目标点的高程信息。
全站仪水平测量及计算公式因为用全站仪(附加棱镜)、经纬仪(附加塔尺)测量高程,是根据两点间的距离和竖直角,应用三角公式计算两点的高差,用全站仪测定高程的方法通常称为三角高程测量(或称测距高程)。
用全站仪测量高程的特点是,精度比用水准仪测量低,但是这种方法简便、灵活,受地形的限制小。
因此通常用于山区的高程测量和地形测量。
三角高程测量,一般应在一定密度的水准测量控制之下。
通常三角高程测量是高程控制测量的一种补充手段,其精度应同同等级的水准测量相同。
当我们采用全站仪(光电测距仪)进行高程测量放样时,如图2-2所示,由于全站仪的视线不都在一个水平面上,而全站仪所读读数由正负之分,在进行高程测量放样计算时,我们输入的数据必须以全站仪所读读数实际输入,设后视点BM的高程为H0,在同一测站下(全站仪的仪器高恒等),放样点的实测高程的计算公式(以下为棱镜高度保持不变的放样点高程推导公式)如下:视线高程H视线 = H0-h0 + v放样点高程H n = H视线-hn-v =(H0-h0 + v)+ hn-v= H0-h0 + hn当棱镜高度改变时,设棱镜改变后的高度相对与后视时的高度改变值为w(改变后的高度减去棱镜初始高度),则放样点的的实测高程为:Hn = H0-h0 + hn-w。
为避免误差因距离的传递,各等级的三角高程测量必须限制一次传递高程的距离。
三角高程测量路线的总长原则上可参考同等级的水准路线的长度,路线尽可能组成闭合多边形,以便对高差闭合差进行校核。
除以上介绍的基本方法外,采用全站仪测量高程中,视线高程有两种计算方法:一、若已知置站点地面高程,则视线高程为“置站点地面高程与全站仪仪器高之和”。
二、若已知后视点地面高程,则视线高程为“后视点地面高程减去后视高差读数加上棱镜高度”。
如何利用三角高程测量法计算高度导语:三角高程测量法是一种常用的测量地理高度的方法,本文将介绍如何利用这一方法计算高度,以及该方法的原理和应用。
一、三角高程测量法的原理三角高程测量法是基于三角形的相似性原理进行计算的。
其基本原理是利用地平线距离、斜视距离和观察点与目标点的高差之间的关系,通过测量三角形的边长和角度来计算目标点的高度。
二、测量设备和要求在进行三角高程测量时,需要一些特定的测量设备和要求:1. 测绘仪器:例如全站仪、经纬仪等,用于测量角度和距离。
2. 测量杆:用于确定观测点和目标点之间的直线距离。
3. 高度测量仪:用于测量观察点和目标点的高差。
4. 精确的地理坐标:用于定位观测点和目标点的位置。
三、测量步骤三角高程测量法的具体步骤如下:1. 确定观测点和目标点的位置,并记录其地理坐标。
2. 利用测量仪器测量观测点与目标点之间的角度。
3. 利用测量杆测量观测点与目标点之间的直线距离。
4. 利用高度测量仪测量观测点和目标点的高差。
5. 根据测量得到的角度、距离和高差,应用三角形相似性原理计算目标点的高度。
四、注意事项在进行三角高程测量时,需要注意以下几个方面:1. 测量精度:为保证测量结果的准确性,应选择精度较高的测量仪器,并严格按照操作要求进行测量。
2. 大气条件:大气的湿度、温度和压力等因素都会影响测量结果,因此需要在测量过程中进行相应的校正。
3. 地形因素:地形的起伏、斜坡和植被等因素会影响视线的可见性,应充分考虑这些因素对测量的影响。
4. 测量范围:由于三角高程测量法是基于视线测量的,因此在选择目标点时需要考虑测量仪器的最大测距范围。
五、应用领域三角高程测量法广泛应用于地理测量、土地调查、工程测量等领域。
具体应用场景包括但不限于:1. 测量山体高度:可以利用三角高程测量法测量山体的高度,用于地质调查、地质灾害预警等。
2. 工程测量:利用三角高程测量法可以测量建筑物、桥梁等工程物体的高度,用于设计和施工。
三角高程全站仪方法
三角高程测量是一种通过三角形相似,利用已知的变量来求解未
知量的方法。
全站仪可以测量距离、角度和高程等参数,因此被广泛
用于三角高程测量中。
具体方法如下:
1. 确定测量点:在需要进行三角高程测量的地区,选择两个已
知高程点和一个需要求解高程的未知点。
2. 进行见证点观测:在已知高程点与未知点之间设置几个见证点,并在这些点上安装全站仪。
在使用全站仪测量时,需要保证全站
仪朝向测站的望远镜指向要测点的方向,并进行水平校正。
3. 进行三角形观测:全站仪进行观测时,需要记录望远镜与三
个预先设置的见证点之间的角度,以及每个见证点与需要测量的未知
点之间的距离。
4. 计算高程:在完成三角形观测后,根据三角形相似原理,可
以得出未知点的高程值。
计算过程需要用到三角函数和高程测量公式,具体方法比较复杂,可以参考相关的高等数学和测量学课程来学习。
在三角高程测量过程中需要注意的是,全站仪的误差对测量结果
影响非常大,因此需要严格按照使用手册进行操作,并进行精度调整。
此外,在选择已知高程点和定位见证点时,应尽可能选择地势平坦、
视线通畅的地方,以避免误差和干扰。
如图一所示,设a,b为地面上高度不同的两点。
已知a点高程ha,只要知道a点对b点的高差hab 即可由hb=ha+hab得到b点的高程hb。
图一图中:d为a、b两点间的水平距离а为在a点观测b点时的垂直角i为测站点的仪器高,t为棱镜高ha为a点高程,hb为b点高程。
v为全站仪望远镜和棱镜之间的高差(v=dtanа)首先我们假设a,b两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hab,可在a点架设全站仪,在b点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若a,b两点间的水平距离为d,则hab=v+i-t故 hb =ha+dtanа+i-t (1)这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当a,b两点间的距离很短时,才比较准确。
当a,b两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。
这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。
我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:1、全站仪必须架设在已知高程点上2、要测出待测点的高程,必须量取仪器高和棱镜高。
二、三角高程测量的新方法如图一所示,设a,b为地面上高度不同的两点。
已知a点高程ha,只要知道a点对b点的高差hab 即可由hb=ha+hab得到b点的高程hb。
图一图中:d为a、b两点间的水平距离а为在a点观测b点时的垂直角i为测站点的仪器高,t为棱镜高ha为a点高程,hb为b点高程。
v为全站仪望远镜和棱镜之间的高差(v=dtanа)首先我们假设a,b两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hab,可在a点架设全站仪,在b点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若a,b两点间的水平距离为d,则hab=v+i-t故 hb =ha+dtanа+i-t (1)这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
全站仪水平测量及计算公式
因为用全站仪(附加棱镜)、经纬仪(附加塔尺)测量高程,是根据两点间的距离和竖直角,应用三角公式计算两点的高差,用全站仪测定高程的方法通常称为三角高程测量(或称测距高程)。
用全站仪测量高程的特点是,精度比用水准仪测量低,但是这种方法简便、灵活,受地形的限制小。
因此通常用于山区的高程测量和地形测量。
三角高程测量,一般应在一定密度的水准测量控制之下。
通常三角高程测量是高程控制测量的一种补充手段,其精度应同同等级的水准测量相同。
当我们采用全站仪(光电测距仪)进行高程测量放样时,如图2-2所示,由于全站仪的视线不都在一个水平面上,而全站仪所读读数由正负之分,在进行高程测量放样计算时,我们输入的数据必须以全站仪所读读数实际输入,设后视点BM的高程为H0,在同一测站下(全站仪的仪器高恒
等),放样点的实测高程的计算公式(以下为棱镜高度保持不变的放样点高程推导公式)如下:
= H0-h0 + v
视线高程H
视线
-hn-v =(H0-h0 + v)+ hn-v 放样点高程Hn = H
视线
= H0-h0 + hn
当棱镜高度改变时,设棱镜改变后的高度相对与后视时的高度改变值为w(改变后的高度减去棱镜初始高度),则放样点的的实测高程为:Hn = H0-h0 + hn-w。
为避免误差因距离的传递,各等级的三角高程测量必须限制一次传递高程的距离。
三角高程测量路线的总长原则上可参考同等级的水准路线的长度,路线尽可能组成闭合多边形,以便对高差闭合差进行校核。
除以上介绍的基本方法外,采用全站仪测量高程中,视线高程有两种计算方法:
一、若已知置站点地面高程,则视线高程为“置站点地面高程与全站仪仪器高之和”。
二、若已知后视点地面高程,则视线高程为“后视点地面高程减去后视高差读数加上棱镜高度”。
以上两种方法计算的视线高程是相等的。
由此可知,前视目标点的高程为“仪器视线高程加上前视高差读数减去棱镜高度”。