对基于特征值模版匹配的方法如何减小外在因素影响的讨论_刘鑫
- 格式:pdf
- 大小:701.99 KB
- 文档页数:2

基于特征的模板匹配方法
模板匹配是一种常用的图像处理方法,可以用于目标检测、图像识别等领域。
基于特征的模板匹配方法是一种改进的模板匹配方法,它能够更准确地匹配目标,并且对光照变化、旋转、缩放等因素具有较好的鲁棒性。
首先,基于特征的模板匹配方法会对模板和待匹配图像进行特征提取。
常用的特征包括SIFT特征、SURF特征、HOG特征等。
这些特征能够很好地描述图像中的局部信息,并且对于光照变化、旋转、缩放等因素具有较好的不变性。
接下来,基于特征的模板匹配方法会对提取出的特征进行匹配。
常用的匹配方法包括基于最近邻的匹配、基于RANSAC的匹配等。
这些方法能够在匹配时考虑到图像中的噪声和误差,并且能够更准确地匹配目标。
最后,基于特征的模板匹配方法会根据匹配结果确定目标在图像中的位置。
常用的确定方法包括RANSAC算法、Hough变换等。
这些方法能够通过多次匹配和投票,确定目标的精确位置。
综上所述,基于特征的模板匹配方法是一种较为先进的模板匹配方法,能够更准确地匹配目标,并且对于光照变化、旋转、缩放等因素具有较好的鲁棒性。
- 1 -。

基于特征的模板匹配方法
基于特征的模板匹配方法是一种计算机图像处理技术,该技术利用事先准备好的特征模板,在待匹配图像中寻找与模板相似的区域,并进行匹配定位。
这种方法可以应用于很多领域,例如目标检测、物体识别、文本识别等。
基于特征的模板匹配方法的核心思想是从待匹配图像中提取出
特征,并与特征模板进行比对。
这种方法的优点在于不需要对待匹配图像进行全局搜索,而是针对感兴趣的区域进行匹配,从而提高处理效率。
在实现基于特征的模板匹配方法时,需要先准备好特征模板。
特征模板应该包含能够代表待匹配图像特征的元素,例如边缘、纹理、颜色等。
接下来,需要在待匹配图像中提取出相应的特征,并与特征模板进行比对。
通常使用的比对方法包括相关性、欧几里得距离、余弦相似度等。
基于特征的模板匹配方法的缺点在于对噪声和变形比较敏感,当待匹配图像存在噪声或变形时,匹配精度可能会下降。
因此,在实际应用中,需要根据具体情况进行调整和优化,以提高匹配精度和鲁棒性。
- 1 -。

基于GPU的特征点提取与匹配算法比较
刘鑫;许华荣
【期刊名称】《计算机辅助设计与图形学学报》
【年(卷),期】2013(025)010
【摘要】判断一种算法的GPU实现是否和CPU实现一样可靠、算法的GPU实现是否能够被安全地使用,是GPU实现能否进一步推广的关键问题.文中以SIFT和KD树搜索这2个被广泛使用的算法为例,对其GPU实现和CPU实现进行了系统的实验分析和比较测试.此外,针对高分辨率图像,给出了基于GPU的SIFT算法和KD树搜索算法的设计与实现.实验结果表明,基于GPU的实现和CPU的实现能提取出95%左右的相似特征点;2种算法实现的特征点重复率和匹配率相当,但GPU 实现可获得高达13X(特征提取)和43X(特征匹配)的加速比,因此基于GPU的实现在具体应用中完全可以被安全地使用.
【总页数】7页(P1496-1502)
【作者】刘鑫;许华荣
【作者单位】中国科学院自动化研究所模式识别国家重点实验室北京 100190;厦门理工学院计算机科学与技术系厦门 361024
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于GPU的SIFT特征点快速匹配 [J], 柯涛;田一涵;段延松
2.基于特征点局部特征值剔除误匹配特征点算法 [J], 余振军; 孙林; 贾坤昊; 孙洋
3.基于改进ORB算法的图像特征点提取与匹配方法 [J], 杨弘凡;李航;陈凯阳;李嘉琪;王晓菲
4.基于改进ORB算法的图像特征点提取与匹配方法 [J], 杨弘凡;李航;陈凯阳;李嘉琪;王晓菲
5.图像特征点提取与匹配的算法分析 [J], 晏细兰;杨震伦
因版权原因,仅展示原文概要,查看原文内容请购买。

基于特征的匹配方法特征点提取是基于特征的匹配方法的第一步。
特征点通常是图像中具有显著性的点,如角点、斑点等。
一般来说,特征点应该在图像变形、缩放、旋转等情况下有较好的稳定性。
常用的特征点提取算法包括Harris角点检测、SIFT(尺度不变特征变换)、SURF(加速稳健特征)等。
特征点描述是基于特征的匹配方法的第二步。
特征点描述是指将特征点的周围区域转化为一个向量或描述子,以便进行后续的分类和匹配。
特征点描述算法通常使用邻域像素的亮度、梯度、颜色等信息来表示特征点,以保证其唯一性和可区分性。
例如,SIFT算法通过将特征点周围区域分解为不同方向和尺度的梯度直方图来进行描述。
特征点匹配是基于特征的匹配方法的最后一步。
特征点匹配的目标是在不同图像中寻找相似的特征点。
经典的特征点匹配算法包括基于欧氏距离的最近邻匹配、基于鲁棒估计的RANSAC(随机一致性算法)等。
最近邻匹配算法通过计算描述子之间的距离,并选择最近邻特征点作为匹配点。
RANSAC算法则通过随机采样和模型评估的迭代过程来找到最佳的匹配。
基于特征的匹配方法的优点是可以在不同图像之间进行局部匹配,而不需要对整个图像进行处理。
这使得特征点匹配算法具有较强的鲁棒性和计算效率。
此外,基于特征的匹配方法还可以处理图像的平移、旋转、缩放等变换,对于遮挡、光照变化等情况也具有一定的鲁棒性。
然而,基于特征的匹配方法也存在一些挑战。
首先,特征点的选择和描述是一个复杂的任务,需要设计合适的算法来提取和描述特征。
其次,特征点匹配算法容易受到噪声、遮挡、光照变化等因素的影响,从而导致误匹配。
此外,在处理大规模图像数据时,特征点匹配算法的计算效率也面临一定的挑战。
总体来说,基于特征的匹配方法是一种成熟且有效的计算机视觉技术。
通过合理的特征点提取、描述和匹配算法,可以实现不同图像之间的匹配和识别,为图像处理和计算机视觉应用提供了重要的工具。

人脸识别技术的特征匹配算法详解近年来,随着科技的不断进步,人脸识别技术逐渐成为了生活中不可或缺的一部分。
它在安全领域、人机交互、社交网络等方面发挥着重要的作用。
而作为人脸识别技术的核心算法之一,特征匹配算法的研究和应用也越来越受到关注。
特征匹配算法是人脸识别技术中的一项重要技术,它通过对人脸图像中的特征点进行提取和匹配,来实现对不同人脸的识别。
在特征匹配算法中,最常见的方法是基于人脸的几何特征进行匹配。
这种方法通过提取人脸图像中的眼睛、鼻子、嘴巴等几何特征点,并计算它们之间的距离和角度等信息,来判断两个人脸是否相似。
在几何特征匹配算法中,最常用的方法是基于特征点的坐标信息进行匹配。
这种方法首先需要对人脸图像进行预处理,包括图像的灰度化、归一化等操作。
然后,通过使用特征点检测算法,如Haar特征、LBP特征等,来提取人脸图像中的特征点。
接下来,通过计算特征点之间的距离和角度等信息,将其转化为特征向量。
最后,通过比较两个特征向量之间的相似度,来判断两个人脸是否匹配。
除了几何特征匹配算法外,还有一种常用的特征匹配算法是基于纹理特征的匹配。
这种方法通过提取人脸图像中的纹理特征,如纹理矩阵、Gabor滤波器等,来判断两个人脸是否相似。
与几何特征匹配算法相比,基于纹理特征的匹配算法更加稳定和准确,但计算复杂度较高。
在实际应用中,特征匹配算法常常需要结合其他技术来提高识别的准确性和鲁棒性。
例如,在人脸识别系统中,通常会将特征匹配算法与人脸检测算法、人脸跟踪算法等结合起来,以实现对不同环境下的人脸进行准确识别。
此外,还可以利用机器学习和深度学习等技术,通过大量的训练数据来优化特征匹配算法,提高其识别的准确性和鲁棒性。
然而,特征匹配算法在实际应用中仍然存在一些问题和挑战。
首先,由于人脸图像的质量和角度等因素的影响,特征点的提取和匹配往往会受到一定的干扰。
其次,特征匹配算法在处理大规模人脸数据库时,计算复杂度较高,需要消耗大量的计算资源。
基于特征点匹配的电子稳像算法研究崔昌浩;王晓剑;刘鑫【摘要】针对基于特征点匹配的电子稳像算法中,SIFT算子计算量大,Harris算子检测不稳的问题,提出用Harris算子来进行特征点提取,并采用SIFT特征描述的方式对提取出的特征点进行描述,从而寻求算法在计算复杂度和匹配精度上的平衡点;在特征点匹配过程中加入RANSAC准则,以提高配对的准确性.仿真实验表明,本文算法对存在抖动的红外视频具有较好的稳像效果.【期刊名称】《激光与红外》【年(卷),期】2015(045)009【总页数】4页(P1119-1122)【关键词】特征点匹配;电子稳像;SIFT;Harris;RANSAC【作者】崔昌浩;王晓剑;刘鑫【作者单位】华北光电技术研究所,北京100015;北京信息高技术研究院,北京100085;华北光电技术研究所,北京100015【正文语种】中文【中图分类】TP391.41因为成像设备载体的随机抖动,而稳定平台的稳定精度时常不能保证图像的绝对稳定,这就会造成同一物体在视频相邻两帧上位置可能会出现差别的结果,从而使使观察者不容易看清视频中的细节信息,而且长期观察会引起视觉疲劳。
对于侦察领域,这就严重地影响了实时情报的准确获取。
电子稳像是指通过高速计算机软、硬件资源,直接对图像序列进行处理,以实时获取图像帧间运动矢量并进行补偿的一种技术。
因为它能快速、准确地稳定存在抖动的视频,而且随着大规模集成电路的迅猛发展,实时进行电子稳像处理成为可能,近年来开始被广泛研究。
图1为摄像设备靶面示意图,假设每一个小格代表一个像素。
在第K帧,目标成像在图1(a)中的实线标记处;而到第(K+1)帧时,由于摄像系统振动导致靶面偏移,目标成像在图1(b)中的实线标记处;到第(K+2)帧时,目标又成像在图1(c)中的实线标记处。
这几帧图像单独来看都是清晰的,但是当他们组成视频展示在监视器上时,由于同一目标在很短时间内反复在不同位置出现,人就会因为视觉暂留效应(暂留时间一般在0.05~0.2 s)而很难清晰分辨该目标的轮廓,从而对目标的辨识带来困难,而且长时间观察此类视频会引起视觉疲劳。
基于Oriental-Harris的特征匹配算法赵瑞欣;向麒文【摘要】常用特征点匹配算法的描述子多数为特征点周围360度统计所得,这类算法在有背景变化的运动目标边缘处匹配不足.因为在特征描述子中包含大量背景信息,从而使得特征点匹配失败.经过研究发现,提出在Harris特征点基础上,结合特征点所在边缘部分梯度方向计算角度方向,通过角度方向反方向做特征描述,屏蔽背景信息,提高边缘匹配,在VS2013+OpenCV2.4.8环境下完成实验.【期刊名称】《现代计算机(专业版)》【年(卷),期】2018(000)014【总页数】3页(P43-45)【关键词】特征描述子;角度朝向;匹配【作者】赵瑞欣;向麒文【作者单位】西华大学计算机与软件工程学院,成都 610039;西华大学计算机与软件工程学院,成都 610039【正文语种】中文0 引言图像匹配技术是计算机视觉研究领域中的一个关键研究方向,也是许多计算机视觉理论与应用的基础。
其主要目标是寻找同一场景或不同场景的两幅或多幅图之间的同质区域,进而根据同质区域的映射,建立起图像之间的空间对应关系。
图像匹配技术在航空影像自动制图、图像三维重建、遥感融合、目标识别、目标跟踪、医学图像分析、影像理解等领域内都有着广泛的应用。
在图像局部不变特征的研究中,需要解决三个核心问题:第一,如何提取特征点;第二如何描述特征点;第三,如何匹配特征点。
其中,常见的基于角点的检测算子Moravec检测算子和Harris检测算子SU⁃SAN检测算子以及FAST检测算子等;典型的基于Blob的检测算子有Hessian检测算子、高斯差分检测算子、Hessian-Laplace检测算子等;基于区域的检测算子主要包括Harris-Affine检测算子、ERB检测算子、MS⁃ER检测算子等。
角点检测只局限于角点,没有好的描述无法匹配;然而基于Blob的检测算子的描述,先统计特征周围信息,再确定主方向,在运动目标边缘处受到很大影响。
— 82 —对基于特征值模版匹配的方法如何减小外在因素影响的讨论刘 鑫(四川大学软件学院,成都 610207)摘 要:基于特征值模版匹配的方法,基本思路就是要让特征值模版能够通过各种算法和战术更好也更精准的描述特征值模版与进行匹配模式的相似程度。
在这个过程中,一个难以忽略的因素便是外在因素,这些外在因素很大程度上将影响到匹配的结果,本文将细致讨论如何尽可能的减少外在因素的影响。
关键词:模版匹配方法;外在因素;算法战术中图分类号:TN929 文献标识码:A 文章编号:1007-9599(2012)02-0082-02How to Reduce the Discussion of ExternalFactors of the Eigenvalue-based Template Matching MethodLiu Xin(Software Engineering College,Sichuan University,Chengdu 610207,China)Abstract:The based eigenvalues template matching method,the basic idea is to make the eigenvalue template through a variety of algorithms and tactics better and more accurate description of the eigenvalue template and the degree of similarity for matching patterns.In this process,a difficult negligible factor is the external factors,these external factors will largely affect the result of a match will be detailed in this article discusses how to minimize the impact of external factors.Keywords:Template matching method;External factors;Algorithm tactics影响了基于模版匹配的外在因素:光线,可分为自然光(混合光线),单色光等;光位,可分为顺光,逆光等;捕捉方式,常用有颜色捕捉,缺陷捕捉等;噪声与干扰:有光噪声,物体噪声等,干扰不同于噪声,这些信息是被正确采集下来的偶然事件。
这里将详细阐述了如何解决匹配抖动的问题即外在因素影响匹配结果的问题。
匹配程度参考公式1:y=kx(0<k ≤1,x ≥0),IF y ≤degree,x 属于R 集合若这里的X 是某一个模式与库模版的匹配程度,Y 是最终会被进行参考的匹配程度,degree 值是我们能够接受的最差的成功匹配的阈值,R 集合呢,也正是发生成功匹配时,X 的范围集合。
K 这里是权重值,它受到外在因素,和库模版所能被参考的程度的影响,反向的,K 的设置也正是为了减小外在因素对最终匹配程度的干扰,当K 的值越趋近与0时,更多的X 将满足方程条件,换句话说R 的域将随K 的减小而增大,首先在栅栏的帮助下,我们会发现X 将会离散的分布在很小的区间上,K 值轻微的变化,会引起R 域的抖动。
为让库模版在做匹配时能够尽可能的少受到外在因素的影响,我们提出了匹配程度参考公式2:match_degree=m*default_template+n*current_template其中m 和n 是大于零并且小于1的浮点数,它们决定了初始化库模版和生成库模版对匹配程度影响的比重,方程拆分为:match_degree_1=m*default_template(0<m ≤1,default_template≥0)match_degree_2=n*current_template(0<n ≤1,current_template≥0)我们可以很清晰的发现,参考公式2其实来源于匹配程度参考公式1,这原于要解决的两个重要的模版匹配问题:1.在匹配操作刚开始的时候如何选取库模版呢?2.在匹配操作进行了一段时间后如何选取更加准确的模版? 首先考虑第一个问题,我们使用这样的战术,在匹配之初,我们首先拥有这样的特征信息,这可能是模式的轮廓信息,缺陷信息,这些特征信息,被转化为特征值存储在初始化库模版中,用以最初的匹配操作使用。
这样做实际上是有缺陷的,因为我们很清楚的了解到外在因素对匹配过程的影响,所以单纯的使用不具备外在因素的特征信息的库模版,是不能很好的进行匹配操作的。
因此我们需要在使用初始化库模版的同时,逐渐建立起具备当前外在因素特征信息的生成库模版,这便引出了第二个问题:在匹配操作进行了一段时间后,应当选具有外在因素的特征信息的库模版做更加精准的匹配操作,这就是第二个方程的意义所在,每当发生一次完全匹配的时候,我们便记录当前的模式的特征信息,并生成一个当前库模版,于此同时,我们将降低初始化库模版对匹配操作的结果所造成影响的比重(这里简单的描述为降低n 值),并同时提升当前库模版对结果所造成影响的比重,于是随着时间的增加,当前生成库模版将逐渐在匹配操作中起主导作用。
这其中涉及到很多细节的问题: 1.是否当前生成库模版将最终取代初始化库模版? 2.M,N 的值将如何变化,才能有最高的匹配准确率? 第一个问题的回答是否定的,生成库模版是不能够取代初始化库模版,通过实验我们能够认识到,生成库模版也可能是误生成库模版,虽然这样的概率并不高,但是一旦发生,匹配操作将完全失去控制,很难实现较高的匹配准确率,因此生成库模版与初始化库模版之间就像坐在跷跷板的两端,谁在匹配中的位置高,便取决与各自权重的变化,这便引出了第二个问题,M,N 值的变化,来实现较高的匹配准确率。
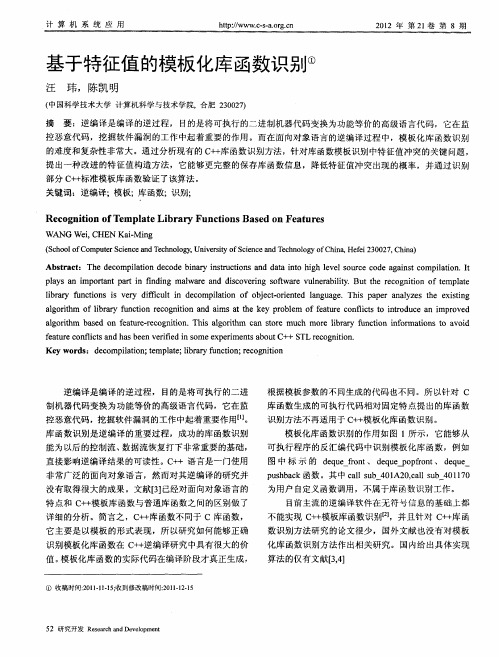
图1上图1为在一定时间内,对手掌手势的匹配程度统计结果,共计1600多次的匹配中,85%的离散匹配值集中在小于1.6-2.0,较大的抖动小于5%,这部分数据可以直接丢弃,可接受抖动幅度在2.0-2.5之间的数据,做二次匹配校验,因为这部分的抖动的原因主要是外部因素引起的,所以可以将栅栏设为≤2.5,首先淘汰较大抖动的部分,然后将剩余部分进入生成库模版中进行匹配,我们发现,在这期间,共发生了10次的完全匹配,那么就是说,生成库模版共计更新了十次,但是这里会有人疑问,生成库模版的更新是否存在着随机性,我们的回答是肯定的,但这样对匹配过程并不影响,因为生成库模版的选取的先决条件是尽可能的满足初始化库模版的特征值,并且包含了当前外在因素的特征值,于是,存在着随机性的生成库模版更新过程,实际上是没有问题的。
而且我们可以大致计算一下更新周期,我们的处理速度使用25帧/秒,发生的概率约为1/60次/帧,也就是说发生生成库模版更新的周期大约是0.4次/秒,这样看来,这样的匹配过程,会大约每2.5秒,对外界进行一次适应过程。
对于生成库模版的匹配,我们发现,带有外在因素特征值的生成库模版的匹配结果明显要比初始化库模版要提高1.0以上,所以可以粗略的估计,这1.0的浮动便是由外在因素造成的。
我们发现对于生成库模版的匹配结果集中在0.2-0.6之间的区间里,可接受抖动发生在0.6-0.8的区间内,所以这里的栅栏应当≤0.8。
分析完初始化库模版的单独匹配过程,和生成库模版的匹配过程后,我们就要回到所要讨论的根本问题上了,如何尽可能的减小外在因素对匹配过程的影响,首先通过实验,我们发现减小外在因素影响的最佳效果就是让初始化库模版的匹配结果尽可能的接近生成库模版的匹配结果,并且将匹配的可接受抖动区间降低,通过计算可以简单的发现,这个变化的阈值大约是1.0-1.2,也就是说原来的匹配结果要减少近70%,这是在当前这个实验得出来的数据,当然通过多次的实验,我们发现当外在因素所占比重大于等于1.0时,库模版确实对匹配过程只起到一定的矫枉过正的作用,因此在这个特殊的结果下,M的值应当由100%,最终降到30%,如若此时,对库模版的R域也将扩大,同时抖动也会被缩小70%。
于此同时我们分析N值,本身而讲,N值应当快速增大到100%,但是有多少的底线增加呢?当然我们的前提假设是匹配程度match_degree是不变的,所以缺口便是那1.0-1.2的阈值,所以当前N应当以50%的速度迅速变化到100%。
1.这个变化过程应当如何设计呢?2.当发生误生成库模版更新时,又当怎样处理呢?通过实验的总结,我们设计了这样的种M&N的变化规律:便是速偏离,慢恢复,这里的速偏离指的便是要让N值迅速在匹配中其主导地位,也就是让具有外在因素的生成库模版作为整个匹配的核心,但是由于存在着误生成库模版的问题,所以需要初始化库模版矫枉过正的作用,当发生对初始化库模版的匹配结果小于生成库模版的匹配结果的时候,当M和N应当向着初始值的方向偏移,这个模型可以形象的描述为两个相向而来的小球,当发生碰撞的时候,就各自恢复一定的距离,然后继续相向运动,直到下一次碰撞发生。
反映这一由M&N变化带来的自适应的过程,这样的自适应过程将会逐渐的趋于平衡,使得匹配过程是自适应调节的,如果我们用一中极端的方法思考,当外在因素发生了巨大的变化时,匹配过程应当如何去自适应呢?当外在因素发生了巨大变化时,带有原来外在因素的生成库模版将因为携带了错误的匹配信息而发生巨大的误差,而初始化库模版缺并不会受到太大的影响,于是,碰撞事件就会频繁的发生,一种极端的假设是,M和N又将回到初始的状态,并快速的适应新的外在因素,这种自适应的方法将很大程度的解决外在因素对匹配过程的影响。
这就是匹配程度参考公式2的核心思想。
参考文献:[1]Gary Bradski&Adrian Kaehler.学习OpenCV[M]北京:清华大学出版社[2]斯蒂格(Steger,C.),尤里奇(Ulrich,M.),威德曼(Wiedemann,C.).机器视觉算法与应用[M]北京:清华大学出版社[3]Donald Hearn.计算机图形学[M]北京:清华大学出版社(上接第81页)作,保护动作时间为0.5s,重合闸时间为1s,开关设备本身分合闸时间为0.5s,那么将上述时间加在一起本条线路故障后线路断电的时间约为2s。
如果按照厂家的设定原则,线路外部出现故障后,一段进线会迅速降低,当电压降低到额定电压的65%时,配电室的失压掉保护和低压自动装置启动,此时瞬时断开进线开关即401进线开关迅速分闸,然后启动时间继电器延时断开联络开关445,一般来说联络开关445的时间延时设置为4.5s左右,那么就会出现以下情况:首先线路故障断电,立即断开一段进线开关401,经过2s后,上级电源重合成功,线路恢复供电,此时低压配电系统检测装置会立即检测到一路进线电源有压,因此闭锁联络开关自动投切回路,此时就会出现低压一段进线开关分闸,联络开关被闭锁无法合闸,低压系统一段母线长时间断电的局面,从而严重影响一段母线用电负荷的供电可靠性。