FANUC发那科工业机器人常见报警的解释
- 格式:doc
- 大小:4.30 MB
- 文档页数:41
FANUC系统常见报警中文对照及解决方法1005X AXIS INTERLOCK ,INHIBIT MACHINE MOVING产生状态及原因X轴闭锁.禁止移动(没在交换台过程中,没在修调方式,台板1或2在伸出位X轴锁住,不能移动设D493=1进入修调方式.检查继电器,电磁阀,开关及线路1006Y AXIS INTERLOCK ,INHIBIT MACHINE MOVING产生状态及原因机械手臂在主轴側Y轴锁住,不能移动.设D499=1进入修调方式.检查继电器,电磁阀,开关及线路1007Z AXIS INTERLOCK ,INHIBIT MACHINE MOVING产生状态及原因机械手臂在主轴側ZY轴锁住,不能移动.设D499=1进入修调方式.检查继电器,电磁阀,开关及线路1010SPINDLE TOOL NOT CLAMP产生状态及原因主轴刀具未夹紧。
主轴不能旋转。
检查主轴刀具夹紧开关,确认动作正常后,同时按下键和键,清除报警。
1011SPINDLE TOOL NOT UNCLAMP产生状态及原因主轴刀具未松开。
主轴不能旋转。
检查主轴刀具松开开关,确认动作正常后,同时按下键和键,清除报警。
1012SPINDLE ORIENTAL NOT COMPLETE产生状态及原因主轴定向未完成(F45.7没输出)。
不能进行刀具交换。
检查主轴定向开关是否工作正常。
1013M FUNCTION DID NOT COMPLETE产生状态及原因在执行M功能时,可能是某个M代码未执行完.程序加工不能正常进行.检查是哪一个M功能未执行。
1014SPINDLE IS NOT AT GEAR POSITION产生状态及原因主轴不在档位。
主轴不能正常旋转,与主轴相关的动作不能执行。
检查主轴高、低档开关及电磁阀。
同时按下键和键,清除报警。
1015SPINDLE CHANGE ERRORFORM HIGH GEAR TO LOW GEAR产生状态及原因主轴由高档变低档错误。
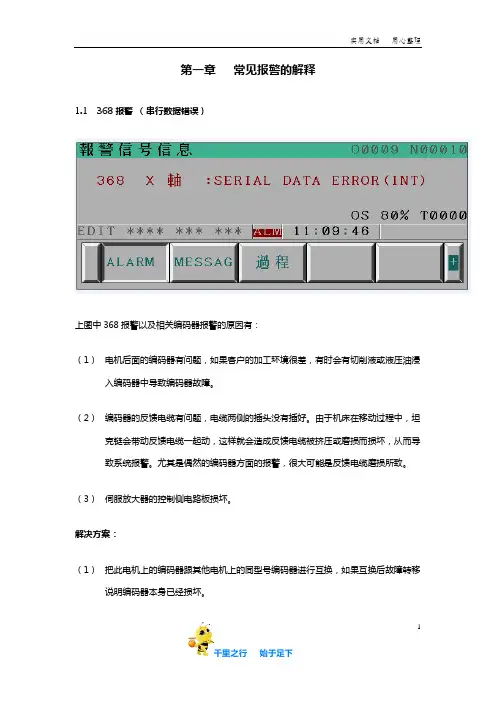
第一章常见报警的解释1.1 368报警(串行数据错误)上图中368报警以及相关编码器报警的原因有:(1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。
由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。
尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。
(3)伺服放大器的控制侧电路板损坏。
解决方案:(1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
1(2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。
(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏,所以最好先确认反馈电缆是否正常。
1.2 电源模块PSM控制板内风扇故障443,610上图报警是电源模块控制板内风扇损坏导致的报警(使用αi电源模块时),报警时电源模块PSM的LED显示“2”,主轴放大器SPM的LED显示“59”。
拆下电源模块控制板后,风扇位置如下图所示:21.3 主轴放大器SPM内冷风扇故障此故障没有画面报警信息,但是有上图的“FAN”在闪烁,此现象表明主轴放大器SPM的内冷风扇出现了故障。
1.4 伺服放大器SVM内冷风扇报警608,4443上图中的报警表示伺服放大器SVM的内冷风扇出现了故障(Z轴和A轴同时出现报警是因为Z轴和A轴是同一个放大器控制的)。
上图中的报警出现时对应的伺服放大器上的LED 显示“1”。
1.5 主轴放大器和伺服放大器的内冷风扇位置4上图中:(1)主轴放大器内冷风扇的安装位置(2)伺服放大器内冷风扇的安装位置(3)主轴放大器的型号A06B-6111-H X#H550(后面带#H***的都是主轴放大器)(4)伺服放大器的型号A06-6114-HX注:(1)不同型号的主轴放大器和伺服放大器对应的风扇的型号也不一样,请参考附录。
故障代码解释及应对措施1)SRVO–001 SVAL1 Operator panel E–stop解释:按下在操作员面板或是操作箱上的紧急停止按钮。
如果SYST-067(面板HSSB断开连接)警报也同时发生,或是如果在面板上LED指示灯(绿色)关闭不发光,主板(JRS15)和面板(JRS15)通讯异常。
主板和面板电路板之间的电缆连接可能松动。
或者,电缆,面板电路板或是主板可能有故障。
注意:如果LED指示灯是关闭不发光的,下面的警报也会产生。
SRVO–001 Operator panel E–stop.SRVO–004 Fence open.SRVO–007 External emergency stop.SRVO–199 Control stop.SRVO–204 External (SVEMG abnormal) E–stop.SRVO–213 Fuse blown (Panel PCB).SRVO–277 Panel E–stop (SVEMG abnormal).SRVO–280 SVOFF input检查显示在示教盒上显示的警报历史。
(措施1):释放在操作员面板或是操作员箱上被按下的紧急停止按钮。
(措施2):确认操面板电路板(CRT16)和急停按钮之间的连接电缆,如果有裸线,则替换电缆。
(措施3):确认连接面板电路板(CRS20或CRS1)和示教盘之间的连接电缆,如果有裸线,则替换电缆。
(措施4):当紧急停止按钮在释放的位置,检查接线端和开关的连接情况,如果没有连通,则是急停按钮的故障。
替换开关或操作面板。
(措施5):替换示教盘。
(措施6):替换面板电路板。
注意:在执行措施7前,完成整个控制器的备份来保存所有程序和设置内容。
(措施7):替换主板。
注释:与SRVO-213同时发生时,可能是因为保险丝已经熔断。
采取与SRVO-213相同的处理措施。
2) SRVO –002 SVAL1 Teach pendant E –stop解释:示教盒上的紧急停止按钮被按下。
3 按下F2[RELEASE(释放)]以释放超行程轴。
4 按住shift键,按下警告清除按钮。
5按住shift键,按下微动键把工具沿超行程轴线微动到可移动的有效范围内。
从损坏的腕部警告复原(SERVO-006)步骤: 1 按住SHIFT键,然后按下RESET键。
2 按住SHIFT键的同时,按下正确的微动键以把机器人移到其能被维修的位置。
从一个脉冲不匹配警告,BZAL警告,RCAL警告复原(SRVO-038,062,063)步骤:1 按下MENUS键,显示界面菜单。
2 按下“0--NEXT---”,然后在下个页面选择“6 SYSTEM”。
按下F1“[TYPE(类型)]”,然后选择“Variables”。
显示系统变量界面。
3 把系统变量$MCR.$SPC_RESET设为TRUE。
(这个系统变量很快会被自动设回FALSE)。
4 按下RESET键以释放警告。
提示:即使检测到一个脉冲计数不匹配警告,该控制数据可能会被纠正。
如果该控制数据被纠正,控制不需要被执行。
只要把$DMR_GRP.$MASTER_DONE设为真,然后在位置界面上选择6 MASTER/CAL。
从其他警告复原步骤:1 清除该警告的引发源。
例如,纠正程序。
2 按下RESET键来重置该警告。
然后,教导盒界面上的警告信息消失。
ALARM LED (发光二极管)灯灭。
C.2 警告代码SRVO 错误代码(ID=11)SRVO-001SERVO Operator panel E--stop可能原因:操作面板上的紧急停止按钮被按下。
解决方法:顺时针拧动紧急停止按钮以松开此按钮,并按下RESET(重启)。
SRVO-002 SERVO Teach pendant E--stop可能原因:教导盒上的紧急停止按钮被按下。
c-671解决方法:松开教导盒上的紧急停止按钮。
SRVO-003 SERVO Deadman switch released可能原因:当开启教导盒时没有按下特殊手持式开关按钮。
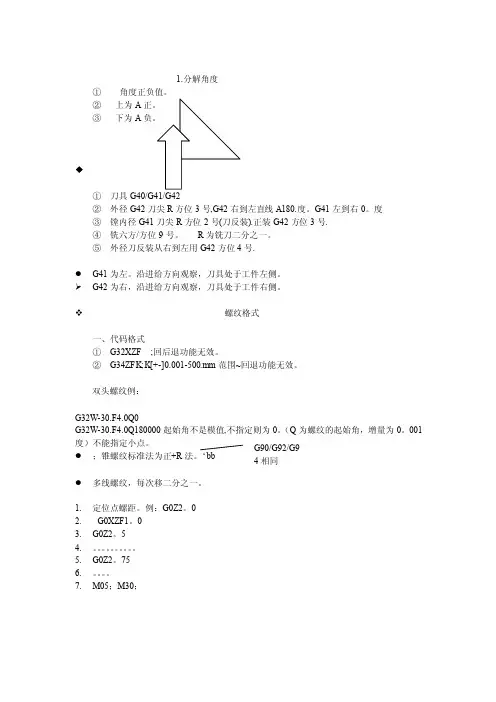
1.分解角度①角度正负值。
②上为A③下为A◆①刀具G40/G41/G42②外径G42刀尖R方位3号,G42右到左直线A180.度。
G41左到右0。
度③镗内径G41刀尖R方位2号(刀反装).正装G42方位3号.④铣六方/方位9号。
R为铣刀二分之一。
⑤外径刀反装从右到左用G42方位4号.●G41为左。
沿进给方向观察,刀具处于工件左侧。
G42为右,沿进给方向观察,刀具处于工件右侧。
螺纹格式一、代码格式①G32XZF ;回后退功能无效。
②G34ZFK;K[+-]0.001-500.mm范围~回退功能无效。
双头螺纹例:G32W-30.F4.0Q0G32W-30.F4.0Q180000起始角不是模值,不指定则为0。
(Q为螺纹的起始角,增量为0。
001度)不能指定小点。
●;锥螺纹标准法为正+R法。
‘bb●多线螺纹,每次移二分之一。
1.定位点螺距。
例:G0Z2。
02.G0XZF1。
03.G0Z2。
54.。
5.G0Z2。
756.。
7.M05;M30;G90/G92/G9 4相同1.车管螺纹格式:主轴转速S20-S50:1.例子:G01X10。
;2.G04X0。
25;3.G32Z-10。
F2。
0;4.G04X0。
25;5.G32X9。
0Z2。
F2。
;2.三针测量法;用三根钢针放在螺纹槽宽。
再用千分尺测量外径。
●角度A/公式d.1.A60。
度`d=M-3*D+0.866*P2.A55。
度`d=M-3.1657*D+0.9605*P3.A30。
度`d=M-4.864*D+1.866*P4.A29。
度d=M-4.99*D+1.933*P`●尺所量的尺寸●D钢针直;;;d------螺纹中径●M千分尺---工件加钢-径●P螺纹的螺距。
1.A60。
度D=0。
577*P2.A55。
度D=0。
564*P3.A30。
度D=0。
518*P4.A29。
度D=0。
516*P●单针法1.A60。
d=M-1。
5*D+0。
108*P+0。
5d*2.A55。
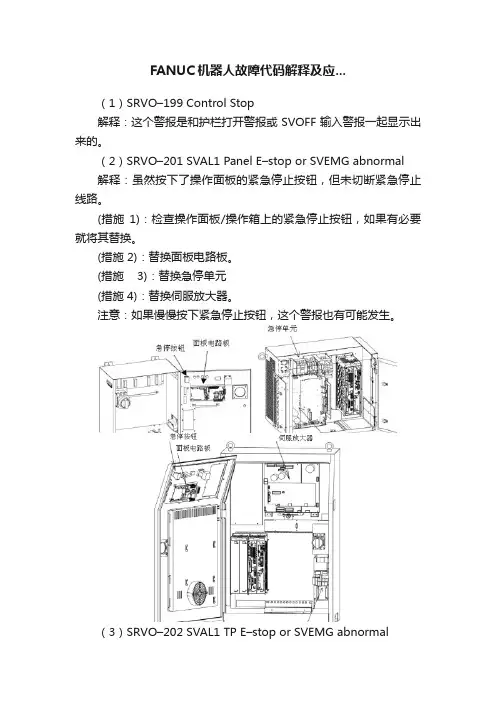
FANUC机器人故障代码解释及应...(1)SRVO–199 Control Stop解释:这个警报是和护栏打开警报或SVOFF输入警报一起显示出来的。
(2)SRVO–201 SVAL1 Panel E–stop or SVEMG abnormal解释:虽然按下了操作面板的紧急停止按钮,但未切断紧急停止线路。
(措施1):检查操作面板/操作箱上的紧急停止按钮,如果有必要就将其替换。
(措施 2):替换面板电路板。
(措施 3):替换急停单元(措施 4):替换伺服放大器。
注意:如果慢慢按下紧急停止按钮,这个警报也有可能发生。
(3)SRVO–202 SVAL1 TP E–stop or SVEMG abnormal解释:虽然按下了示教盒的急停按钮,但未切断紧急停止线路。
(措施1):检查示教盒连接电缆,如果有必要就将其替换。
(措施 2):替换示教盒。
(措施 3):替换面板电路板。
(措施4):替换急停单元(措施 5):替换伺服放大器。
注意:如果慢慢按下紧急停止按钮,这个警报也有可能发生。
(4)SRVO–204 SVAL1 External (SVEMG abnormal) E–stop 解释:虽然按下了面板电路板上所连接的外部急停开关,但未切断急停线路。
端子连接:双链规格:TBOP4 EES1 和EES11 之间、EES2 和EES21 之间。
单链规格:TBOP1 EMGIN1 和 EMGIN11 之间。
(措施1):检查面板电路板的端子台之间(双链规格:TBOP4 EES1 与 EES11 、EES2 与EES21,单链规格:TBOP1 EMGIN1 和 EMGIN11 之间)所连接的开关和配线,发现不良时予以替换。
(措施 2):替换面板电路板。
(措施 3):替换急停单元。
(措施 4):替换伺服放大器。
以上就是全部操作步骤,有什么不明白的可以在评论区提问。
如果本文对您有帮助,可以收藏一下!您的点赞关注是对作者最大的支持!。
FANUC系统常见报警中文对照及解决方法1.AL-01:伺服报警尘埃这个报警表示伺服电机遇到了尘埃问题。
解决方法是清洁伺服电机,并确保其周围环境清洁。
2.AL-02:伺服报警过载这个报警表示伺服电机遇到过载问题。
解决方法是检查伺服电机和相关设备的负载情况,确保其在正常范围内。
3.AL-03:伺服报警过温这个报警表示伺服电机遇到过温问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
4.AL-04:伺服报警驱动断开这个报警表示伺服电机的驱动断开。
解决方法是检查伺服电机的连接线路是否正常,确保电缆连接牢固。
5.AL-05:伺服报警电源断开这个报警表示伺服电机的电源断开。
解决方法是检查伺服电机的电源线路是否正常,确保电源连接牢固。
6.AL-06:伺服报警过流这个报警表示伺服电机遇到过流问题。
解决方法是检查伺服电机和相关设备的电流情况,确保其在正常范围内。
7.AL-07:伺服报警过压这个报警表示伺服电机遇到过压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
8.AL-08:伺服报警欠压这个报警表示伺服电机遇到欠压问题。
解决方法是检查伺服电机和相关设备的电压情况,确保其在正常范围内。
9.AL-09:伺服报警过热这个报警表示伺服电机遇到过热问题。
解决方法是检查散热装置是否正常工作,安装风扇或增加散热片等,并减少伺服电机的负载。
10.AL-10:伺服报警驱动电流异常这个报警表示伺服电机驱动电流异常。
解决方法是检查伺服电机的驱动器和电缆连接是否正常,并确保电缆连接牢固。
发那科报警处理(中文)发那科报警处理文档一、报警简介:在发那科操作过程中,可能会遇到各种报警情况,报警信息可以帮助用户快速定位问题并采取相应的处理措施。
本文档详细介绍了发那科报警的分类、处理步骤以及常见解决方法。
二、报警分类:1、运动报警:运动报警是指运动过程中出现的异常情况,如轴超速、轴过载等。
处理步骤如下:a:停止运动,切换到手动模式。
b:检查相关轴和传感器是否正常工作,是否有物体阻挡。
c:若问题未解决,记录报警代码和背景信息,联系发那科售后服务。
2、通信报警:通信报警是指与外部设备通信异常的情况,如通讯断开、通讯超时等。
处理步骤如下:a:检查网络连接是否正常,确认网线、交换机等设备是否正常工作。
b:检查控制器与外部设备间的连接,如电缆是否插紧等。
c:若问题未解决,记录报警代码和背景信息,联系发那科售后服务。
3、传感器报警:传感器报警是指传感器异常的情况,如传感器故障、信号异常等。
处理步骤如下:a:检查传感器是否正确安装并与控制器连接良好。
b:检查传感器的供电情况,确保传感器供电正常。
c:若问题未解决,记录报警代码和背景信息,联系发那科售后服务。
4、系统报警:系统报警是指控制器出现故障或异常情况的报警,如控制器过热、系统时钟错误等。
处理步骤如下:a:关闭电源,待控制器冷却后重新启动。
b:检查控制器的风扇是否正常运行,确保散热良好。
c:若问题未解决,记录报警代码和背景信息,联系发那科售后服务。
三、常见解决方法:1、重启:将电源关闭,然后重新启动,有时可以解决一些临时性问题。
2、检查连接:检查各部件之间的连接是否牢固,确保电源、网线、传感器等设备都正常连接。
3、清理设备:定期清理设备,确保内外部无堵塞或杂质干扰。
4、升级软件:及时升级发那科控制软件以获取最新的功能和 bug 修复。
5、联系售后服务:如问题无法自行解决,请联系发那科售后服务提供详细的报警代码和背景信息以获得专业帮助。
附件:本文档中提到的报警代码查询表法律名词及注释:1、发那科:指由发那科公司生产的自动化设备。
第一章常见报警得解释1、1 368报警 (串行数据错误)上图中368报警以及相关编码器报警得原因有:(1)电机后面得编码器有问题,如果客户得加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器得反馈电缆有问题,电缆两侧得插头没有插好。
由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。
尤其就是偶然得编码器方面得报警,很大可能就是反馈电缆磨损所致。
(3)伺服放大器得控制侧电路板损坏。
解决方案:(1)把此电机上得编码器跟其她电机上得同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
(2)把伺服放大器跟其同型号得放大器互换,如果互换后故障转移说明放大器有故障。
(3)更换编码器得反馈电缆,注意有得时候反馈电缆损坏后会造成编码器或放大器烧坏,所以最好先确认反馈电缆就是否正常。
1、2 电源模块PSM控制板内风扇故障443,610上图报警就是电源模块控制板内风扇损坏导致得报警(使用αi电源模块时),报警时电源模块PSM得LED显示“2”,主轴放大器SPM得LED显示“59”。
拆下电源模块控制板后,风扇位置如下图所示:1、3 主轴放大器SPM内冷风扇故障此故障没有画面报警信息,但就是有上图得“FAN”在闪烁,此现象表明主轴放大器SPM得内冷风扇出现了故障。
1、4 伺服放大器SVM内冷风扇报警 608,444上图中得报警表示伺服放大器SVM得内冷风扇出现了故障(Z轴与A轴同时出现报警就是因为Z轴与A轴就是同一个放大器控制得)。
上图中得报警出现时对应得伺服放大器上得LED 显示“1”。
1、5 主轴放大器与伺服放大器得内冷风扇位置上图中:(1)主轴放大器内冷风扇得安装位置(2)伺服放大器内冷风扇得安装位置(3)主轴放大器得型号A06B-6111-H XXX#H550(后面带#H***得都就是主轴放大器) (4)伺服放大器得型号A06-6114-HXXX注:(1)不同型号得主轴放大器与伺服放大器对应得风扇得型号也不一样,请参考附录。
第一章常见报警的解释上图中368报警以及相关编码器报警的原因有:(1)电机后而的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。
由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。
尤其是偶然的编码器方而的报警,很大可能是反馈电缆磨损所致。
(3)伺服放大器的控制侧电路板损坏。
解决方案:(1)把此电机上的编码器跟其他电机上的冋型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
(2)把伺服放大器跟苴同型号的放大器互换,如果互换后故障转移说明放大器有故障。
(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏, 所以最好先确认反馈电缆是否正常。
4 4 3 X 4 4 3 Y 4 4 3 Z 4 4 3 A 6 1 0X 6 1 0Y 6 1Z 6 1 0 A:CNV. :CNV. :CNV. :CNV. :CNV. :CNV. :CNV. :CNV. COOL ING COOL ING COOL ING COOL ING COOL ING COOL ING COOL ING COOL INGFAN FAN FAN FAN FAN FAN FAN FAN FAILURE FAILUREFAILURE FAILUREFAILURE FAILURE FAILURE FAILURE INPSM 1.2电源模块PSM 控制板内风扇故障443, 610 上图报警是电源模块控制板内风扇损坏导致的报警(使用Qi 电源模块时),报警时电源模 块PSM 的LED 显示“2 J 主轴放大器SPM 的LED 显示“59”。
拆下电源模块控制板后,风扇位置如下图所示:1.3主轴放大器SPM 内冷风扇故障此故障没有画而报警信息,但是有上图的“FAN”在闪烁,此现象表明主轴放大器SPM 的内 冷风扇出现了故障。
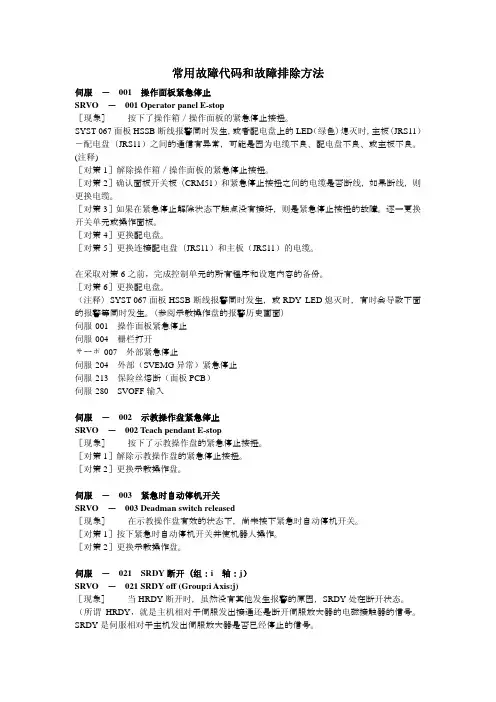
常用故障代码和故障排除方法伺服 - 001操作面板紧急停止SRVO- 001 Operator panel E-stop[现象]按下了操作箱/操作面板的紧急停止按扭。
SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
(注释)[对策1]解除操作箱/操作面板的紧急停止按扭。
[对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策4]更换配电盘。
[对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。
在采取对策6之前,完成控制单元的所有程序和设定内容的备份。
[对策6]更换配电盘。
(注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)伺服-001操作面板紧急停止伺服-004栅栏打开サーボ-007外部紧急停止伺服-204外部(SVEMG异常)紧急停止伺服-213保险丝熔断(面板PCB)伺服-280SVOFF输入伺服 - 002示教操作盘紧急停止SRVO- 002 Teach pendant E-stop[现象]按下了示教操作盘的紧急停止按扭。
[对策1]解除示教操作盘的紧急停止按扭。
[对策2]更换示教操作盘。
伺服 - 003紧急时自动停机开关SRVO- 003 Deadman switch released[现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策1]按下紧急时自动停机开关并使机器人操作。
[对策2]更换示教操作盘。
伺服 - 021SRDY断开(组:i轴:j)SRVO- 021 SRDY off (Group:i Axis:j)[现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。
发那科报警表一、后台编辑报警1.报警信息: “BP/S alarm”,BP/S报警。
报警说明: 与一般的程序编辑中发生的P/S号报警相同,发生BP/S 报警(070、071、072、073、074、085、086、087)。
2. 140号报警报警信息: “BP/S alarm”,BP/S报警。
报警说明: 在后台选择或者删除了一个在前台选中的程序。
二、程序错误报警1.000号报警报警信息: “Please turn off power”,请关闭电源。
报警说明:设定了必须关断电源才能生效的机床数据。
2.001号报警报警信息: “TH Parity alarm”,TH奇偶报警。
报警说明:TH报警(输入了不符合奇偶的字符),应修改纸带。
3.002号报警报警信息: “TV Parity alarm”,TV奇偶报警。
报警说明:TV报警(一个程序段内的字符数为奇数)。
仅在TV检测为ON时发生。
4.003号报警报警信息: “T oo many digits”,数字太多。
报警说明: 输入了超过允许位数的数据。
5.004号报警报警信息: “Address not found”,没有发现地址。
报警说明: 在程序段的开始无地址,输入了数字或符号“-”。
修改程序。
6.005号报警报警信息: “No data after address”,地址之后没有数据。
报警说明: 地址后面没有跟随数据,而出现下一个地址或者EOB码。
修改程序。
7.006号报警报警信息: “Illegal use of negative sign”,非法使用负号。
报警说明: 负号“-”输入错误(“-” 出现在不可能输入这个符号的地址中或者输入了两个以上的“-”)。
修改程序。
8.007号报警报警信息: “Illegal use of decimal point”,非法使用十进制小数点。
报警说明: 小数点“.”输入错误(小数点“.”出现在不可能输入这个符号的地址中或者输入了两个以上的“.”)。
发那科FANUC常见报警大全:第十一期(刚性攻丝相关报警)1PS0200 非法S代码指令报警原因:刚性攻丝指令转速超过设定最大转速排查思路:1确认程序指令转速是否正确2修改最大转速参数P5241~P52432PS0201 在刚性攻丝中未指令进给速度报警原因:程序错误,未指令刚性攻丝速度。
排查思路:1确定程序中攻丝轴速度设定2确认模态G94/G953PS0202 位置LSI溢出报警原因:系统错误,刚性攻丝时主轴分配值过大。
排查思路:模拟主轴检查主轴编码器接线,调整A、*A、B、*B接线。
4PS0203 刚性攻丝指令错误报警原因:程序错误。
排查思路:刚性攻丝,指令格式错误,按照M29Sxxxx执行。
5PS0204 轴的指令非法报警原因:指令非法移动。
排查思路:修改程序,在M29 Sxxx以及G84/G74之间不要指令轴移动。
6PS0205 刚性攻丝方式DI信号关闭报警原因:梯形图中关于刚性攻丝信号处理错误。
排查思路:1修改梯形图保证刚性攻丝过程中,G61.0信号正确。
2多主轴设定时,排查多主轴信号。
7PS0206 不能改变平面报警原因:刚性攻丝过程中切换平面。
排查思路:修改程序,刚性攻丝过程中不能指令平面修改程序(G17/18/19)。
8SV0410 伺服报警:n轴超差报警原因:N轴(攻丝轴1~4)停止时的误差超过设定值。
排查思路:修改超差数据P5312(第一主轴)P5352(第二主轴)。
9SV0411 伺服报警:n轴超差报警原因:N轴(攻丝轴1~4)停止时的误差超过设定值。
排查思路:修改超差数据P5313、P5314。
10SV0740 刚性攻丝报警:超差报警原因:主轴移动时位置误差过大。
排查思路:1扩大参数P5310 /P5350 P5312/P5352。
2调整攻丝增益、前馈、时间常数减小误差。
11SV0741 刚性攻丝报警:超差。
FANUC发那科报警概述B-65285EN/02 故障处理 1.概述1概述这一章描述了对每种模块的故障处理过程,根据你目前的故障,阅读相应的章节并采取相应的措施。
首先,检查你的模块的报警号和状态显示(列表中的报警号是针对不同的CNC),请在第二章的列表中找出,且在第三章中找到相应的详细的信息。
然后按照详细的信息采取相应的措施。
3.故障处理及其方法故障处理B-65285EN/02 2报警号及其简要说2.1 对应15i2.2.1伺服报警报警号SVM SPM 说明备注SV0027 无效的参数设定 3.3.6SV0361 编码器相位错误(内置) 3.3.7(1)SV0364 软件相位错误(内置) 3.3.7(1)SV0365 LED错误(内置) 3.3.7(1)SV0366 脉冲错误(内置) 3.3.7(1)SV0367 计数错误(内置) 3.3.7(1)SV0368 串行数据错误(内置) 3.3.7(3)SV0369 数据传送错误(内置) 3.3.7(3)SV0380 LED错误(别置) 3.3.7(2)SV0381 脉冲编码器相位错误(别置) 3.3.7(2)SV0382 计数错误(别置) 3.3.7(2)SV0383 脉冲错误(别置) 3.3.7(2)SV0384 软件相位错误(别置) 3.3.7(2)SV0385 串行数据错误(别置) 3.3.7(3)SV0386 数据传送错误(别置) 3.3.7(3)SV0387 传感器错误(别置) 3.3.7(2)SV0421 半闭环超差错误 3.3.8SV0430 伺服电机过热 3.3.5SV0431 3 电源单元:主环路过载 3.1.3SV0432 6 电源单元:输入电压低 3.1.6SV0433 电源单元:DC LINK电压低 3.14SV0434 2 伺服单元:控制电源电压低 3.2SV0435 5 伺服单元:DC LINK电源电压低 3.2 SV0436 软件温度报警(OVC) 3.3.3SV0437 1 电源单元:输入电流过大 3.1.1SV0438 b 伺服单元:电机电流报警(L轴) 3.2SV0438 c 伺服单元:电机电流报警(M轴) 3.2SV0438 d 伺服单元:电机电流报警(N轴) 3.2SV0439 7 电源单元: DC LINK电压过大 3.1.7 SV0440 H 电源单元:减速电源能量过大 3.1.11 SV0441 电流偏置报警 3.3.8SV0442 5 电源单元: 3.1.5SV0443 2 电源单元:冷却风扇停止 3.1.2SV0444 1 伺服单元:内部冷却风扇停止 3.2SV0445 软连接报警 3.3.4SV0446 硬连接报警没公开SV0447 硬连接报警(别置) 3.3.4SV0448 反馈不匹配报警 3.3.8SV0449 8. 伺服单元:IPM报警(L轴) 3.2SV0449 9. 伺服单元: IPM报警(L轴) 3.2SV0449 A. 伺服单元: IPM报警(L轴) 3.2SV0600 8. 伺服单元:DC link 电流报警(L轴) 3.2 B-65285EN/02 故障处理 3.故障处理及其方法SV0600 9. 伺服单元: DC link 电流报警(M轴) 3.2SV0600 A. 伺服单元: DC link 电流报警(N轴) 3.2SV0601 F 伺服单元:散热器的冷却风扇停止 3.2SV0602 6 伺服单元:过热 3.2报警号SVM SPM 说明备注SV0603 8. 伺服单元:IPM报警(L轴) 3.2SV0603 9. 伺服单元:IPM报警(L轴) 3.2SV0603 A. 伺服单元:IPM报警(L轴) 3.2SV0604 P 通讯错误 3.2SV0605 8 电源单元:回馈电压过高 3.1.8SV0606 A 电源单元:散热器的冷却风扇停止 3.1.9SV0607 E 电源单元交流电源电压缺相 3.1.103.故障处理及其方法故障处理B-65285EN/02 2.2.2主轴报警报警号SPM PSM 说明备注SP0001 01 电机过热 3.4.1SP0002 02 速度超差 3.4.2SP0003 03 DC LINK 回路保险断 3.4.3SP0004 04 E 电源单元的交流输入缺相 3.1.10SP0006 06 温度传感器没有连接 3.4.4SP0007 07 速度太高 3.4.5SP0009 09 主回路过载/IPM过热 3.4.6SP0011 11 7 电源单元:DC LINK 电压太高 3.1.7SP0012 12 DC LINK 回路电流太大/IPM报警 3.4.7, 3.5.1 SP0015 15 输出切换/主轴切换报警 3.4.8SP098X 18 和数校验错误 3.4.9SP098X 19 U相电流超差 3.4.10SP098X 20 V相电流超差 3.4.10SP0021 21 位置编码器的极性设定错误 3.4.11SP022X 24 串行传送数据错误 3.4.12SP0027 27 没有连接位置编码器 3.4.13SP0029 29 短时的过载 3.4.14SP0030 30 1 电源单元的输入电流太大 3.4.14SP0031 31 电机锁住报警 3.4.15SP0032 32 串行通讯用的LSI RAM 错误 3.4.16SP0033 33 5 电源单元:DC LINK 预先充电失败 3.1.5SP0034 34 参数值超出了可设范围 3.4.17SP0035 35 齿数比参数错误 3.5.2SP0036 36 误差计数器溢出 3.4.18SP0037 37 速度检测器的参数设定错误 3.4.19SP0041 41 位置编码器的一转信号检测错误 3.4.20SP0042 42 位置编码器的一转信号没有被检测到 3.4.21SP0046 46 位置编码器的一转信号在螺纹切削时检测错误 3.4.22 SP0047 47 位置编码器的信号错误 3.4.23SP0050 50 在主轴同步中,超出了速度指令计算值 3.4.24SP0051 51 4 电源单元:DC LINK 电压太低 3.1.4SP0052 52 ITP 信号错误1 3.4.25SP0053 53 ITP 信号错误2 3.4.25SP0054 54 电流过载报警 3.4.26SP0055 55 电源线的切换状态不正常 3.4.27SP0056 56 内部冷却风扇停止 3.4.28SP0057 57 H 电源单元:减速电源电压太大 3.1.11SP0058 58 3 电源单元:主回路过载 3.1.3SP0059 59 2 电源单元:冷却风扇停止 3.1.2SP0066 66 主轴与放大器之间的通讯停止 3.4.29SP0069 69 超出了安全速度 3.4.30SP0070 70 不正常的轴数据 3.4.31SP0071 71 非正常的安全参数 3.4.32SP0072 72 电机速度不匹配 3.4.33SP0073 73 电机的传感器没有连接 3.4.34SP0074 74 CPU 测试错误 3.4.35B-65285EN/02 故障处理 3.故障处理及其方法报警号SPM PSM 说明备注SP0075 75 CRC 检测错误 3.4.1SP0076 76 安全功能没有执行 3.4.2SP0077 77 轴数不匹配 3.4.3SP0078 78 安全参数不匹配 3.1.10SP0079 79 非正常的内部测试操作 3.4.4SP0081 81 电机传感器的一转信号检测错误 3.4.5 SP0082 82 电机传感器的一转信号没有检测到 3.4.6 SP0083 83 电机传感器的信号错误 3.1.7SP0084 84 主轴传感器没有连接 3.4.44SP0085 85 主轴传感器的一转信号检测错误 3.4.45 SP0086 86 主轴传感器的一转信号没有检测到 3.4.46 SP0087 87 主轴传感器的信号错误 3.4.47SP0088 88 散热器的冷却风扇停止 3.4.48其他主轴放大器报警 3.4.52SP0097(MODEL A)SP097X A ROM 错误 3.4.49SP097X A1 ROM 错误 3.4.49SP097X A2 ROM 错误 3.4.49SP0098 其他电源单元报警 3.4.52SP0098b0 在放大器与模块之间的通讯错误 3.4.50 (MODELA)b1 6 电源单元:控制电源电压太低 3.1.6SP0098(MODEL A)b2 8 电源单元:再生电源能量太大 3.1.8SP0098(MODEL A)b3 2 电源单元:散热器的冷却风扇停止 3.1.9 SP0098(MODEL A)b0 放大器与模块之间的通讯错误 3.4.50SP0110(MODEL B)b1 6 电源单元:控制电源电压太低 3.1.6SP0111(MODEL B)b2 8 电源单元:再生电源能量太大 3.1.8SP0112(MODEL B)b3 A 电源单元:散热器的冷却风扇停止 3.1.9 SP0113(MODEL B)c0 通讯数据报警 3.4.51SP0120(MODEL B)SP0121c1 通讯数据报警 3.4.51(MODEL B)SP0122c2 通讯数据报警 3.4.51(MODEL B)3.故障处理及其方法故障处理B-65285EN/02 2.2 对应16i,18i,20i,21i,和Power Mate i 2.2.1伺服报警报警号SVM SPM 说明备注361 编码器相位错误(内置) 3.3.7(1)364 软件相位错误(内置) 3.3.7(1)365 LED错误(内置) 3.3.7(1)366 脉冲错误(内置) 3.3.7(1)367 计数错误(内置) 3.3.7(1)368 串行数据错误(内置) 3.3.7(3)369 数据传送错误(内置) 3.3.7(3)380 LED错误(别置) 3.3.7(2)381 脉冲编码器相位错误(别置) 3.3.7(2) 382 计数错误(别置) 3.3.7(2)383 脉冲错误(别置) 3.3.7(2)384 软件相位错误(别置) 3.3.7(2)385 串行数据错误(别置) 3.3.7(3)386 数据传送错误(别置) 3.3.7(3)387 传感器错误(别置) 3.3.7(2)417 无效的参数 3.3.6421 半闭环超差错误 3.3.8430 伺服电机过热 3.3.5431 3 电源单元:主环路过载 3.1.3432 6 电源单元:输入电压低 3.1.6433 电源单元:DC LINK电压低 3.14434 2 伺服单元:控制电源电压低 3.2435 5 伺服单元:DC LINK电源电压低 3.2 436 温度软件报警(OVC) 3.3.3437 1 电源单元:输入电流过大 3.1.1438 b 伺服单元:电机电流报警(L轴) 3.2 438 c 伺服单元:电机电流报警(M轴) 3.2 438 d 伺服单元:电机电流报警(N轴) 3.2 439 7 电源单元: DC LINK电压过大 3.1.7 440 H 电源单元:减速电源能量过大 2.1.11 441 电流偏置报警 3.3.8442 5 电源单元: 3.1.5443 2 电源单元:冷却风扇停止 3.1.2444 1 伺服单元:内部冷却风扇停止 3.2445 连接软件报警 3.3.4446 连接硬件报警没公开447 连接硬件报警(别置) 3.3.4448 反馈不匹配报警 3.3.8449 8. 伺服单元:IPM报警(L轴) 3.2449 9. 伺服单元:IPM报警(L轴) 3.2449 A. 伺服单元:IPM报警(L轴) 3.2453 断线软件报警(别置) 3.3.4600 8. 伺服单元:DC link 电流报警(L轴) 3.2 600 9. 伺服单元:DC link 电流报警(M轴) 3.2 600 A. 伺服单元:DC link 电流报警(N轴) 3.2 601 F 伺服单元:散热器的冷却风扇停止 3.2 B-65285EN/02 故障处理 3.故障处理及其方法报警号SVM SPM 说明备注602 伺服单元:过热 3.2603 8. 伺服单元:IPM报警(L轴) 3.2603 9. 伺服单元:IPM报警(L轴) 3.2603 A. 伺服单元:IPM报警(L轴) 3.2604 P 通讯错误 3.2605 8 电源单元:回馈电压过高 3.1.8606 A 电源单元:散热器的冷却风扇停止 3.1.9 607 E 电源单元交流电源电压缺相 3.1.10。
第一章常见报警的解释1.1 368报警(串行数据错误)上图中368报警以及相关编码器报警的原因有:(1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。
由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。
尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。
(3)伺服放大器的控制侧电路板损坏。
解决方案:(1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
(2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。
(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏,所以最好先确认反馈电缆是否正常。
1.2 电源模块PSM控制板内风扇故障443,610上图报警是电源模块控制板内风扇损坏导致的报警(使用αi电源模块时),报警时电源模块PSM的LED显示“2”,主轴放大器SPM的LED显示“59”。
拆下电源模块控制板后,风扇位置如下图所示:1.3 主轴放大器SPM内冷风扇故障此故障没有画面报警信息,但是有上图的“FAN”在闪烁,此现象表明主轴放大器SPM的内冷风扇出现了故障。
1.4 伺服放大器SVM内冷风扇报警 608,444上图中的报警表示伺服放大器SVM的内冷风扇出现了故障(Z轴和A轴同时出现报警是因为Z轴和A轴是同一个放大器控制的)。
上图中的报警出现时对应的伺服放大器上的LED 显示“1”。
1.5 主轴放大器和伺服放大器的内冷风扇位置上图中:(1)主轴放大器内冷风扇的安装位置(2)伺服放大器内冷风扇的安装位置(3)主轴放大器的型号A06B-6111-H XXX#H550(后面带#H***的都是主轴放大器)(4)伺服放大器的型号A06-6114-HXXX注:(1)不同型号的主轴放大器和伺服放大器对应的风扇的型号也不一样,请参考附录。
FANUC常见报警大全:(SV430~SV449)1SV0430 伺服电机过热报警原因:该报警是编码器中的温度检测元件进行了温度检测,当电机温度过高时会出现报警。
排查思路:1排查参数问题,请重新对伺服电机进行初始化,最好对照参数列表进行仔细确认。
2查看诊断No.308,是否实际温度过高,可以利用手触摸等方式排查,如果实际温度不高请排查硬件。
3如果实际温度基本符合诊断数据,请排查电机温度过高原因。
检查硬件时,可通过替换编码器、电机、反馈线缆和放大器的方式进行排查。
4短时间内可以通过参数P2300#7屏蔽报警。
2SV431 变频器回路正常报警原因:伺服放大器或者共同电源过热导致报警。
排查思路:1请排查放大器接线,特别是模拟伺服适配器使用中,ALM信号需要接0。
2排查电机参数。
3更换放大器。
3SV0432 变频器控制电压低报警原因:伺服放大器或者共同电源电压下降。
排查思路:1排查放大器短接线,是否存在虚接。
2排查放大器进电电压是否符合要求。
3排查开关电源、变压器等电流是否足够。
4更换放大器。
4SV0433 变频器 DC LINK 电压低报警原因:伺服放大器或者共同电源电压下降。
排查思路:1测量强电实际电压情况是否低于强电要求电压范围。
2检测是否存在急停断开然而因空气开关,接触器等异常导致强电未接通。
3可能跟随SV0364等报警出现,解决其他报警,问题解除。
5SV0434 逆变器控制电压低报警原因:放大器控制电源电压低于要求。
排查思路:测量控制电源电压,排查外围控制电路拉低电压原因。
6SV0435 逆变器 DC LINK 低电压报警原因:伺服放大器 DC LINK 电压下降。
排查思路:1首先排查放大器上各接线针脚是否接错,线缆是否良好。
2排查放大器本身问题。
7SV0436 软过热继电器报警(OVC)报警原因:系统内部计算电机使用情况,超过当前负载所能连续使用的时间,系统防止电机损坏的保护性报警。
排查思路:1排查电机固有参数。
发那科报警处理(中文)
【章节1:引言】
1.1 文档目的
本文档旨在提供发那科报警处理的详细流程,以帮助操作员快速准确地处理报警事件。
1.2 文档范围
本文档适用于所有使用发那科的操作员和维护人员。
【章节2:报警类型及处理步骤】
2.1 报警类型分类
(这里所有可能的报警类型,如机械故障、电气故障、传感器故障等)
2.2 处理步骤
2.2.1 报警发生时的应急措施
(详细描述当报警时,操作员应该立即采取的应急措施,如停止运行,断电等)
2.2.2 报警诊断与原因分析
(描述如何通过查看报警信息、日志等,对报警进行诊断和原因分析)
2.2.3 报警处理方法
(根据不同的报警类型,具体的处理方法和步骤,包括维修、更换零件、重新校准等)
2.2.4 报警处理记录与报告
(建议操作员在处理报警时记录详细的处理过程和结果,并报告供日后参考和追溯)
【章节3:预防措施】
3.1 定期检查与维护
(建议定期对进行检查和维护,以预防潜在的报警事件发生)
3.2 培训与知识传递
(建议定期进行操作员培训,提高其对报警处理的能力,并确保相关知识得到传递和积累)
【章节4:附件】
【章节5:法律名词及注释】
(本文档中所涉及的法律名词及其相应的注释,以方便读者理解和使用)
【章节6:结尾】。
第一章常见报警的解释1.1 368报警(串行数据错误)上图中368报警以及相关编码器报警的原因有:(1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。
由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。
尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。
(3)伺服放大器的控制侧电路板损坏。
解决方案:(1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
1(2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。
(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏,所以最好先确认反馈电缆是否正常。
1.2 电源模块PSM控制板内风扇故障443,610上图报警是电源模块控制板内风扇损坏导致的报警(使用αi电源模块时),报警时电源模块PSM的LED显示“2”,主轴放大器SPM的LED显示“59”。
拆下电源模块控制板后,风扇位置如下图所示:21.3 主轴放大器SPM内冷风扇故障此故障没有画面报警信息,但是有上图的“FAN”在闪烁,此现象表明主轴放大器SPM的内冷风扇出现了故障。
1.4 伺服放大器SVM内冷风扇报警608,4443上图中的报警表示伺服放大器SVM的内冷风扇出现了故障(Z轴和A轴同时出现报警是因为Z轴和A轴是同一个放大器控制的)。
上图中的报警出现时对应的伺服放大器上的LED 显示“1”。
1.5 主轴放大器和伺服放大器的内冷风扇位置4上图中:(1)主轴放大器内冷风扇的安装位置(2)伺服放大器内冷风扇的安装位置(3)主轴放大器的型号A06B-6111-H X#H550(后面带#H***的都是主轴放大器)(4)伺服放大器的型号A06-6114-HX注:(1)不同型号的主轴放大器和伺服放大器对应的风扇的型号也不一样,请参考附录。
(2)导致放大器侧风扇故障的原因主要是因为客户现场工作环境较差,致使风扇上粘有油污,使风扇转动时的阻力加大甚至粘住风扇叶片从而导致风扇线圈烧坏。
所以在日常维护过程中要注意保持机床电气柜的密封和清洁。
51.6 主轴传感器的报警9073(串行主轴错误)#9073报警时主轴放大器SPM 的LED显示“73”,是由于主轴电机的传感器信号不正常引起。
引起报警的原因可能是主轴放大器、主轴电机传感器和传感器的反馈电缆3个方面的故障。
1.7 主轴和伺服的报警750,51366如果开机出现以上报警。
一般是电源模块、主轴放大器、伺服放大器的LED都无显示。
请检查电源模块PSM的CX1A插头是否有200V输入,如果200V输入正常,更换电源模块PSM的控制板。
1.8 5136的报警(伺服放大器故障)如果出现5136报警:7(1)检查每个伺服放大器SVM的控制电源24V是否正常,LED是否有显示,如果LED 没有显示而24V电源输入正常,判断伺服放大器有故障。
(2)如果LED有显示,检查FSSB光缆接口COP10A和COP10B靠下的一个光口是否发光,如果不发光可以判断是放大器有故障。
(3)检查连接伺服放大器和系统轴卡的FSSB光缆是否有故障。
(检查的办法是用手电筒照光缆的一头,如果另一头的2个光口都有光发出确认光缆正常,否则不正常)。
(4)确认参数是否有更改,恢复机床的原始参数。
1.9 401的报警8如上图,如果所有轴都出现401报警,检查电源模块PSM的插头CX3(MCC控制信号)和CX4(外部急停*ESP)是否正常。
请参考上面αi放大器连接中对CX3和CX4连接的详细定义。
正常时CX4的2个接线点应该导通(也就是2个接线点都有24V电压)。
如果CX3和CX4外部接线正常,检查电源模块PSM本身或主轴放大器和伺服放大器是否有故障。
91.10 926的系统报警10926报警出现的原因:(1)系统轴卡可能有故障。
(2)如果是机床运行过程中偶然出现,很可能是伺服放大器的控制电压24V瞬间降低所致。
对于βi伺服放大器,因为伺服放大器的电源是通过外部24V稳压电源提供的,故需要检查机床正常工作时伺服放大器的24V电源是否正常,是否有与放大器共用24V电源的外部I/O信号短路而导致放大器的24V降低,可以给放大器单独接一个24V稳压电源测试。
注意如果机床配有带抱闸的电机,电机的抱闸用24V不要跟放大器的24V共用一个电源。
(3)伺服电机的编码器反馈电缆对地短路也可能会导致放大器的控制电压降低而引起此故障。
(4)检查SDU单元(分离型的检测单元,使用光栅尺时用)的电源是否有瞬间降低的现象。
11121.11 411报警配置0I-TC系统车床,系05年1月份的系统。
客户使用机床时,Z轴不动,只在自动方式下进给X轴,切一个外圆后结束。
偶尔出现Z轴410报警,实际Z轴的确移动了一点。
Z轴坐标值也有变化,可是并没有给Z轴指令。
报警原因:1.电源单元和伺服放大器的DC连接片螺丝松动.2.轴卡故障。
3.负载惯量设定不合适。
4.电机动力电缆接线松动。
5.伺服放大器故障.6.如果Z轴是垂直轴,由于振动或者电气元器件的不稳定,瞬间出现EMG,这个时候Z轴要进行抱闸,但这里有个延时,动作上反应出来就是Z轴往下掉了。
而由于EMG很快的就恢复了,从而造成系统判断Z轴静态超差,报410。
7. 检查参数1828、1829是否设定太小了,如果是普通旋转刀架,在换刀的时候会对Z轴有小的冲击力,1829设定小的话,就容易出现410-AL,RESET后还可以恢复正常,还可以检查丝杠的安装是否存在问题。
8. 可能是丝杆或导轨某处阻力大(没有油或有硬物等)造成跟随误差大造成,或者因为温度相差大,刚开机时温度低,机械间隙大,误差超出1829设定值了,但是运行一段时间温度高了,间隙小了, 又不出现报警。
13解决方法:1.检查电源单元和伺服放大器的DC连接片螺丝是否松动,2.检查接地和轴卡3.检查Z轴的负载惯量比,参数PRM2021是否设得过小.可适当加大该值看看.4.检查Z轴伺服电机的动力电缆是否有松动。
5.换Z轴伺服放大器。
6.检查屏幕上是不是有EMG闪过?放大器LED又是如何变化的?把ESP 有关回路短接。
7. 检查参数1828、1829设定141.12 950,971报警950 报警(PMC 系统报警SB7)[971NMI OCCURRED IN SLC 使用PMC-SA1]如果检测到PMC 错误,就发生此报警。
可能的原因包括I/O Link 通讯错误和PMC 控制电路出故障。
若画面上显示“PC050”,则可能是I/O Link出现了通讯错误:PC050 I/O LINK(CHx) aa:bb-aa:bb or PC050 I/O LINK CHx aabb-aabb:aabbCHx 为通道号。
aa 和bb 显示了内部错误代码。
若发生此报警,可能的原因如下:(1)使用I/O 单元时,分配了I/O 单元的地址,但是该I/O 单元没有连接。
15(2)电缆没有连接好。
(3)I/O 设备(I/O 单元,Power Mate 等)失效。
(4)I/O Link 连接中的I/O板的24V电源没有或瞬间降低,检查I/O板用的24V电源是否正常。
(5)如果外部I/O点出现对地短路也会把I/O板的24V电压拉低造成此故障,检查是否有外部I/O偶然对地短路。
(6)系统主板故障。
1.13报警代码12主电路的直流部分(DC Link)电流过大.在SPM-2.2i---11i中,主电路的电源模块(IPM)检测出异常,电流过大或过载.一.在SPM-2.2i---11i中显示本报警时,请对报警代码09的相应内容也进行确认.二.控制印刷板安装问题请切实安装控制印刷板.(控制印刷板与功率板的连接器偏离时,有可能会发出本报警)16三.刚给出主轴旋转指令后发生报警时1.电机动力线故障,请确认电机动力线之间有无短路,接地故障,必要时更换动力线.2.电机绝缘故障,电机接地故障时,请更换电机.3.电机固有参数没有正确设定4.SPM故障,可能是功率元件(IGBT,IPM)损坏,请更换SPM.四.主轴旋转过程中发生报警时1.功率元件损坏可能是功率元件(IGBT,IPM)损坏,请更换SPM.不满足放大器的设定条件,或散热装置部分灰尘堆积冷却不充分时,功率元件有可能损坏.关于设置条件,请参阅放大器规格说明书.如果放大器背面的散热装置部分灰尘较多时,请采用吹风方式进行清洁,要对结构进行研究,以使散热装置部分不会直接接触切削油等.2.电机固有参数没有正确设定3.速度传感器信号的异常(主轴负荷较大)请确认主轴传感器的信号波形,如有异常,请进行调整,或更换检测部分.0i-MC17主轴单元9012-AL1)从SPM单元侧拆下动力线测量绝缘阻值为500M左右(用兆欧表500V档)正常。
2)试运行程序出现9012-AL,关机再启动在MDI旋转主轴立刻出现9012-AL,更换SPM 单元后,试运行一小时左右正常。
18I-MB转动刀具轴出现9012报警,放大器12报警1,用万用表测动力线没有问题,检查参数正常。
2,在未换SPM之前,执行M3S1,SPM能正常吸合,持续不会出现9012报警,换新的SPM,上电ALM还是一样,执行M3S1也能正常3,拆除旧电机,安装新的电机,执行M3S600指令,没有报警出现。
更换元件:A06B-1408-B153。
现系统正常,机床正常0IMC,配SVSP---A06B-6134-H303#A,三个伺服轴可正常动作,但在刚给出主轴转动指令后而主轴还没转动时即出现9012报警,报警原因: 报警和放大器,主轴电机,动力线,反馈线都有关系的.首先在脱开主轴动力线后,给主轴0转速指令,放大器00状态应该说明驱动没有问题. 如果动力线相相间短路,给主轴转速1819指令后,也会出现AL-12. 检查原因是动力线的绝缘受热融化,动力线磨破了,导致相间短路。
解决方法: 由于外部环境影响,电缆长时间被腐蚀炭化, 导致相间短路。
1.14报警代码27α位置编码器的信号断线一.电机励磁关闭时发生此报警时1.参数设定有误,参照65280确认传感器的设定参数2.电缆断线,反馈电缆连接不正确时,请更换电缆3.SPM 故障,请更换SPM 或SPM 控制印刷电路板.二.触动电缆时发生报警时1.连接器接触不良或电缆断线可能是导线断线,请更换电缆.有切削油浸入连接器部分时,请进行清洗.三.电机旋转时发生报警时1.传感器与SPM 之间的电缆屏蔽处理故障参照65282连接的要求,实施电缆的屏蔽.2.与伺服电机的动力线绑扎到了一起如果从传感器到SPM之间电缆与伺服电机动力线绑扎到了一起,请分别绑扎.0I-TC,SPM型号为:A06B-6111-H022#H550,出现9027-AL.同时更换了SPM单元侧板(A20B-2100-0800)和主轴位置编码器(A860-0309-T302)后报警消除.几次故障出现都是在早上一开机的时候,检查SPM单元的侧板和电缆的问题.使用了3个月又出现9027-AL,用户自己更换主轴位置编码器,发现内部有元件烧坏,换上新的位置编码器后使用了8小时又出现9027-AL, 更换电缆后正常.主轴在工作一段时间后出现9027#oi-mate-tc20现场开机空转S2500,大约在20分钟后出现9027报警,打开电器柜发现位置编码器反馈线有磨损的痕迹,怀疑是装配时过于紧造成的,更换反馈线后,开机运转2个多小时无故障。