脉冲星自主导航概述
- 格式:pdf
- 大小:214.69 KB
- 文档页数:7
X射线脉冲星导航的实现分析摘要 X射线脉冲星发射的X射线,具有周期高稳定性、易观测性等特点,是一种优秀的导航定位系统射线源。
现阶段对导航系统的研究,重点从卫星导航转移为天体导航,X射线脉冲星导航系统是一个主要的方向。
本文简单介绍了脉冲星及其特点,主要结合脉冲星导航的时间测量介绍其工作原理,并就X射线脉冲星导航如何实现,进行了进一步的分析。
关键词 X射线脉冲星天体导航 XNAV一、引言1967年,英国剑桥大学的Hewish等发现了第一颗射电脉冲星网。
1974年,Downs首次提出基于射电脉冲星的航天器自主轨道确定方法,并概算定轨精度达到150km。
1976年,美国的天文观测卫星Ariel-5首次观测到脉冲星的x射线辐射信号。
1981年,Chester和Butman 提出利用脉冲星X射线源为航天器导航的构想。
1993年,Wood设计了非常规恒星特征试验,继承了传统天文导航掩星方法,对利用X射线源的航天器轨道和姿态确定以及时间保持进行了综合研究。
2003年,sheikh在深入分析研究脉冲星的基本物理特征和现代卫星导航系统体制的基础上,初步论证了基于X射线脉冲星的航天器自主高精度轨道确定的可行性。
至此,X射线脉冲星导航已经成为导航研究的热点。
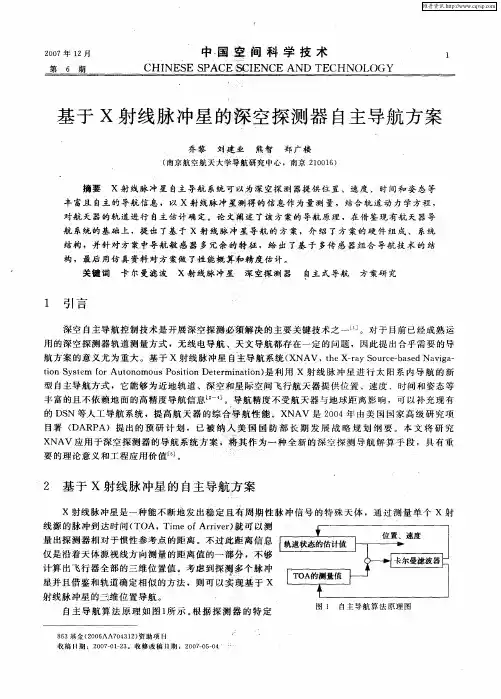
那么,X射线脉冲星导航定位的基本原理是怎样的呢?二、脉冲星导航的时间测量1.脉冲到达时间测量。
基于脉冲星的导航系统的基本观测量是脉冲信号的到达时间(Time Of Arrival, TOA),TOA观测量是通过将观测到的信号轮廓与一个高SNR的标准模板轮廓比对得到的。
如公式(1)所示,观测得到的脉冲轮廓p(t)与标准脉冲轮廓s(t)的差来源于以下几个因素:时间偏离τ,待定常数b,比例因子k和随机噪声η(t)。
p(t)=b+k[s(t-τ)]+η(t)(1)式中0≤t≤P,P为观测时刻脉冲星的自转周期。
根据脉冲轮廓的建立方法,脉冲轮廓是用等间隔Δt采样得到的。
在总观测时间内,大量光子N的TOA被记录下来,记为τ0~τN -1,然后被转化为惯性框架下的等效时间t0~tN-1。
脉冲星导航技术研究与应用第一章:引言脉冲星导航技术是一种基于脉冲星的天文导航方法,它与GPS 等卫星导航系统不同,它不需要卫星信号和地面基站的支持,因此具有天然的安全、隐私和抗干扰特性。
脉冲星导航技术不受天气、地形等自然条件的限制,适用于广泛的应用领域,如航空航天、海洋航行、船舶定位、智能交通、地震勘探、物流追踪和无人驾驶等。
本文将针对脉冲星导航技术的研究现状和应用前景进行论述。
第二章:脉冲星导航技术原理脉冲星是一种特殊的中子星,它既具有极强的磁场,又能以极高的速度自转。
当脉冲星的磁轴与地球连线在一定角度内时,会向地球发射一系列极短的脉冲信号,这种信号称为脉冲星射电信号。
利用脉冲星信号的周期、频率等参数,可以确定地面接收器和脉冲星的相对位置和速度,从而实现对地球定位和导航。
脉冲星导航技术主要包括单点定位和差分定位两种方法。
单点定位是指通过接收一颗脉冲星的信号,利用计算方法确定接收器的位置。
差分定位是指同时接收两颗脉冲星的信号,通过计算两颗卫星的距离差或相对位置信息来确定接收器的位置。
第三章:脉冲星导航技术研究现状脉冲星导航技术的研究始于20世纪80年代,目前已经取得了一系列重要进展。
首先,对脉冲星射电信号的特性和测量方法进行了深入研究。
通过不断改进接收设备和处理算法,提高了信号测量的精度和可靠性。
其次,建立了包括数学模型、计算方法和实验验证等在内的完整的脉冲星导航系统。
该系统可以实现对接收器的实时位置和速度的定位,同时也可以提供其他相关信息,如地球引力场的测量等。
最后,针对不同的应用场景和需求,开发了一系列脉冲星导航应用软件和硬件设备,如飞行器导航、车辆定位和物流追踪等。
第四章:脉冲星导航技术应用前景由于脉冲星导航技术具有天然的优势,因此在未来的应用场景中将具有广泛的应用前景。
首先,脉冲星导航技术将成为未来新一代导航系统的重要组成部分。
特别是在高精度导航领域,由于脉冲星传输的信号稳定性和精度远高于GPS,因此它将成为无人机、航空器、火箭等高性能飞行器的首选导航方式。
天体导航之射电脉冲星导航、脉泽导航董江云南天文台传统的天体导航•传统的天体导航可分为光学星光导航勺射电天文导航。
大气层内星光导航受气象条件及昼夜明暗影响,从而难以实现全天候工作,历来是天文导航技术应用的严重障碍。
所以,射电天体导航是全天候工作的必由之路。
•传统射电天文导航技术设备已经有几十年发展历史,原苏联研制的射电六分仪已经装船使用,美国的射电六分仪也已完成研制并装船试验。
他们均沿用传统的天文导航理论,只是将敏感频段由可见光改变为射电。
可用射电源数量少、射电源信号微弱,从而难以实现连续导航. 导航精度低、导航保障不连续♦设备体积庞大,直接影响射电天文导航技术的应用和发展。
经典天体导航一经纬度的确定•光学六分仪一纬度• Google —钟的历史:计时得到经度•星敏感器一测角•可靠性和冗余度是系统对抗中更要的概念。
・其国海军军舰上每天都在用天文导航(此处指以传统的以光学天体为皋础天体导航)美国海军政策要求必须有两种独立的定位手段.除GPS Z外,天文导航是•种独立的、无条件的、全球范围的、低费用的、自主式导肮系统.“姜国海军天文台应用技术部研究员J .Bangert博士在弟国国防部应用天文学论坛1995年年会上专门从天文导航算法及软件的角度,论述「夭文定位的重要性。
美国海军天文台天文应用室主任P.M.Janiczuk博士认为.天文导航“能较容易地达到1角秒测天精度,从而使定位梢度达到30米左右.不再需要任何的科学突破,所必须的技术目前都存在”。
1997年4月2日开始服没的B22A隐身轰炸机选择以NAS 27夭文导航单元及惯性导航单元构成飞行安全的双車保障. 进一步表明了其对天文导航技术的极度重视,其深远意义发人深思。
•俄罗斯一直把天文导航系统放在重要位置,在星光导航潜望镜、射电六分仪零技术领域占据优势.并注求实效和花巨资迸行天文导航基础理论研究及实验室建设。
・英国有关人士认为,如果故方是在首先使我方的电子导航、无线电导航设备失去作用的情况下进行第一次打击,那么,天文导航就显得格外碇要。
美国脉冲星导航空间飞行试验进展丁陶伟 帅平(中国空间技术研究院钱学森空间技术实验室)1引言脉冲星属于高速旋转的中子星,具有极其稳定的周期性,它被誉为自然界中最稳定的天文时钟。
脉冲星导航是以脉冲星辐射的X射线信号作为天然信标,航天器自主确定位置、速度、时间和姿态等导航参数的过程。
近十余年来,脉冲星导航一直是国际航天前沿技术研究的热点领域,备受世界航天大国关注[1-2]。
2004年,美国国防高级研究计划局(DARPA)提出“X射线导航与自主定位验证”(XNAV)计划[3],目标是建立一个能够为航天器提供定轨精度10m、定时精度1ns、姿态测量精度3″的脉冲星导航网络。
2006年,美国国家航空航天局(NASA)启动利用X射线脉冲星的深空探测器自主导航技术研究计划,以满足2030年实现250m的轨道精度指标需求[4-5]。
2011年,NASA戈达德航天飞行中心(GSFC)的首席研究员基思·根德罗(Keith Gendreau)博士提出“中子星内部构成探测器”(NICER)任务的科学提案[6]。
同时,在NASA太空技术任务局(STMD)的资助下,GSFC联合美国大学空间研究协会(USRA)开展了“空间站X射线计时与导航技术试验”(SEXTANT)项目[7],并将其纳入NICER任务的技术演示增强项目。
2017年6月,NICER任务探测设备成功发射至国际空间站,开始开展中子星内部结构探测研究以及SEXTANT 脉冲星导航空间飞行试验,实测验证脉冲星导航的技术可行性。
2 NICER任务概述任务背景2011年,NASA提出了新一轮的“探索者任务”(Explorers Missions)计划,选择了11项科学提案进行评估,提案包括研究地球大气、太阳、银河系以及恒星周围的类地行星等未来的潜在科学任务,进而从中选择具有最佳科学价值和可行性发展的计划作为“探索者任务”。
NICER任务作为提案之一,其计划在国际空间站上放置X射线计时仪器,以探索中子星内部物质的结构、动力学和能量辐射机SEXTANT项目工程团队SEXTANT项目经理,GSFC工程师卢克·温特尼茨担任项目系统架构师。
脉冲星导航原理
脉冲星导航是一种基于天文测量的导航方法,主要利用脉冲星的高度稳定的周期性脉冲信号来进行导航定位。
脉冲星是一类特殊的星体,它们是以极快的自转速度和规律的脉冲射电信号而闻名的天体。
以下是脉冲星导航的基本原理:
1.脉冲星的特性:脉冲星是一类自转十分迅速的中子星,它们以极快的速度自转,通常在几十毫秒到几秒之间。
由于其独特的几何形状和自转速度,它们会向地球发射规律的脉冲射电信号。
2.脉冲星信号的周期性:脉冲星的信号非常规律,其周期性非常高,可以达到亚毫秒级别。
这使得测量脉冲星信号到达的时间能够达到极高的精度。
3.多普勒频移:由于导航器和脉冲星之间的相对运动,接收到的脉冲星信号会出现多普勒频移。
通过测量这种频移,可以得到导航器相对于脉冲星的速度信息。
4.测量时间延迟:通过测量接收到的脉冲星信号到达的时间,结合多普勒频移信息,可以计算导航器与脉冲星之间的距离。
5.多颗脉冲星的组合:为了提高导航的精度和可靠性,通常会使用多颗脉冲星的信号进行组合导航。
这样,即使有一颗脉冲星不可用,系统仍然能够进行导航。
6.时钟校正:脉冲星导航系统需要高度精确的时钟。
通过对多颗脉冲星信号的测量,可以对导航器的时钟进行校正,提高导航的时空精度。
总体而言,脉冲星导航利用脉冲星的高度规律的周期性信号,通过测量时间延迟和多普勒频移,实现对导航器位置和速度的准确测量。
由于脉冲星的天文特性相对稳定,脉冲星导航系统具有很高的精度和鲁棒性,因此在一些特殊应用场合,如太空导航,可以发挥独特的优势。
脉冲星导航技术发展概况及若干思考随着科学视野的不断扩大,当今基于地基系统的GNSS导航定位技术无法满足深空探测飞行器导航定位的需要。
新兴的脉冲星导航技术可为深空探测飞行器进行导航定位。
因此,将从当今基于地基系统的GNSS导航定位技术存在的问题,什么是脉冲星,脉冲星导航定位基本原理以及脉冲星导航发展现状四个方面说明脉冲星导航技术发展概况,并提出若干思考。
标签:脉冲星导航;x射线探测器;时空基准自上世纪六十年代人们发现第一颗脉冲星“小绿人”以来,科学家们就开始探索能否根据脉冲星的特性将其应用到导航定位领域。
通过探测脉冲星信号提取信号特征并将其与已知脉冲星数据库相匹配,进而精确判断出探测到的是哪一颗脉冲星的辐射信号。
这样一来,我们可通过收集脉冲星信号并匹配脉冲星数据库,可为某一目标提供其相对于若干脉冲星的相对位置,为其进行导航定位。
1当今基于地基系统的GNSS导航定位技术存在的问题目前的GNSS导航定位技术如美国的GPS、中国的北斗、俄罗斯的GLONASS、欧盟的Galileo,需依托地面上的监控中心来为卫星测姿,传递和处理卫星导航信号,进而实现导航定位功能。
为提高导航定位精度,我们需在卫星信号传播过程中进行设备延迟改正,钟差改正,相对论效应改正,地球自转改正,地球引力改正,潮汐效应改正,多路径效应改正等。
我们还需解决如何快速精确地求解整周未知数。
在卫星信号传播过程中上述各项改正研究,求解整周模糊度的研究目前仍存在一定的问题,直接阻滞了GNSS导航定位向高精度方向发展。
目前GNSS导航定位技术只能提供厘米级或分米级的成果,无法满足对定位成果精度有较高要求的研究领域的需要,如地球动力学研究。
GNSS導航定位技术基于地基系统,只能在地球及近太空领域范围内提供导航定位服务,无法为外太空以及太阳系以外的空间飞行器提供导航定位服务。
2什么是脉冲星脉冲星来源于超新星,是暮年的恒星发生大爆炸后形成的残骸在变成黑洞之前的存在状态,属于高速旋转的强磁中子星。
X射线脉冲星空间导航定位X射线脉冲星介绍脉冲星是一种快速自转并具有强磁场的中子星,其辐射的电磁波信号在沿磁极方向的一个较窄的锥体(锥角<10度)内向外传播,磁轴与旋转轴之间有一定夹角的脉冲星带着辐射光束在宇宙中扫过一个巨大的空心锥体。
可在可见光、无线电、红外线、紫外线、X射线等频段内观测到脉冲星辐射的灯塔式扫射现象。
脉冲星最重要的特征是自转周期的稳定性,周期变化率(△p/p)的典型值为10^-15,某些毫秒脉冲星的自转周期变化率可达10^-19~10^-21,被誉为“自然界最精确的频率基准”。
脉冲星单个射电脉冲的强度和形状都是不断变化的,特别是其辐射强度的变化呈现出一种近似随机的过程,其偏振特性也是非常复杂的。
但脉冲星具有稳定的累积脉冲轮廓,通过它可以测量脉冲到达时间(TOA: Time of Arrival),进而进行脉冲星辐射脉冲周期稳定性理论、脉冲星时理论及XPNA V(X-ray Pulsars-based Navigation)技术等的研究。
根据获取能量方式的不同,X射线脉冲星可以分为旋转动能X射线脉冲星(RXPSR:Rotation-powered X-ray Pulsars)、伴生X射线脉冲星(AXPSR:Accretion-powered X-ray Pulsars)和奇异X射线脉冲星(AXP:Anomalous X-ray Pulsars)三类。
旋转动能脉冲星(RPSR)的辐射能量来自于自身的旋转动能。
但大部分RPSR脉冲星缺少X射线辐射或者存在突发定时噪声。
伴生脉冲星(APSR)通过吸收伴星上的物质为其辐射提供能量。
由于脉冲双星中双星的相互吸引、旋转效应及伴星对脉冲信号的衰减和扭曲效应,AXPSR脉冲星的辐射脉冲周期表现出更加复杂的特性。
奇异X射线脉冲星辐射能量来自于自身的磁场能量。
影响X射线脉冲星导航定位的因素包括:宇宙空间分布、累积脉冲形状、脉冲周期长短、脉冲周期稳定性、X射线电磁波辐射流量、累积脉冲轮廓信噪比等。
基于XPNA V和SINS的容错组合导航系统苏哲许录平张华谢强(西安电子科技大学电子工程学院,陕西西安710071)摘要X射线脉冲星导航的滤波周期较长,仅能提供稀疏的位置估计;脉冲星辐射的光子被遮挡时,航天器无法进行导航参数的解算。
为弥补上述缺陷,提高航天器自主导航的能力,提出一种基于脉冲星导航和捷联惯导的容错组合导航系统。
捷联惯导具有自主性和不间断性的优点,可弥补脉冲星导航滤波周期较长的缺陷;脉冲星导航的长期稳定度好,可抑制捷联惯导的误差随时间发散。
该系统通过相位残差检测天体遮挡等因素引起的故障,利用联邦扩展卡尔曼滤波融合导航信息。
仿真实验结果表明,同脉冲星导航方法相比,该方法具有更高的精度和更短的滤波周期,且不受天体遮挡的影响。
关键词脉冲星;容错;组合导航;卡尔曼滤波;捷联惯性导航中图分类号V249.23Fault-tolerant integrated navigation system based on XPNA V andSINSSu Zhe Xu Luping Zhang Hua Xie Qiang(School of Electronic Engineering, Xidian University, Xi’an 710071, China)Abstract For the long filter period, X-ray pulsar-based navigation (XPNA V) can only provide sparse position estimation. And the navigation parameters can not be calculated when the X-ray photon is blocked by other celestial bodies. In order to remedy above defects and enhance the spacecraft’s ability of autonomous navigation, a fault-tolerant integrated navigation system based on XPNA V and strapdown inertial navigation system (SINS) is proposed. The defect of long filter period of XPNA V is remedied by the independency and uninterruptibility of SINS. The long term stability of XPNA V is used to restrain the divergence of SINS errors over time. This system introduces phase residual detection method to detect and isolate the breakdown of XPNA V system which is caused by the shelter from other celestial bodies, and uses federated extended Kalman filter to fuse navigation information. The experimental results show that this method has higher navigation accuracy and shorter filter period than the pulsar navigation method, and is not affected by the shelter from other celestial bodies.Key words pulsar; fault-tolerant; integrated navigation; Kalman filter; strapdown inertial guidanceX射线脉冲星导航(XPNA V: X-ray Pulsar-based Navigation)是一种新的天文自主导航技术,能够为近地轨道、深空和星际空间飞行的航天器提供位置、速度、时间和姿态等丰富的导航信息[1]。
X射线脉冲星天文自主导航算法研究的开题报告题目:X射线脉冲星天文自主导航算法研究一、研究背景及意义X射线脉冲星是一种高能天体,它们是由于中子星的旋转和磁场产生的辐射而产生的。
尽管这些天体距离地球很远,但它们发射的辐射可以提供有关宇宙学和基本物理性质的重要信息。
与此同时,由于中子星的旋转非常稳定,因此X射线脉冲星也可以用作天文导航系统的基础。
X射线脉冲星天文导航(XNAV)的目标是使用X射线脉冲星作为导航信标进行航行的技术。
XNAV可以为未来的空间探测器、任务以及人类探险提供一个更精确的位置与导航。
XNAV最大的挑战之一是如何精准地锁定一个特定的X射线脉冲星,并跟踪其位置和运动。
为了解决这个问题,需要开发一种自主导航算法,该算法能够自动地将天体与目标进行匹配,并在线跟踪其位置。
二、研究内容本研究的主要内容是设计和实现一种X射线脉冲星自主导航算法。
该算法将包括以下步骤:1.采集并处理X射线脉冲星的数据。
2.运用该算法提取X射线脉冲星的特征,包括脉冲周期、脉冲星速度等。
3.结合卫星的传感器测量数据,建立脉冲星的位置模型。
4.开发一个跟踪算法,在完成初步匹配后,在线跟踪脉冲星的位置与速度。
5.开发算法并完成相应的实验以验证算法的准确性。
三、研究方法本研究将采用以下方法:1.开发数据处理方法并对X射线脉冲星进行特征提取2.利用卫星传感器获取的数据建立空间参考框架,并结合脉冲星特征定位脉冲星3.开发自主跟踪算法,以在线跟踪脉冲星的移动4.利用模拟X射线脉冲星数据进行算法验证四、预期成果与意义本研究将以设计和实现一种X射线脉冲星自主导航算法为主要目标。
预期成果包括:1.提供一种解决X射线脉冲星导航和追踪问题的有效算法2.验证所开发的自主导航算法的实用性和可行性,为X射线脉冲星导航的发展提供技术支持3.提高对X射线脉冲星定位和追踪的理解和认识,为未来的空间探测器和任务提供更准确的位置和导航信息。
综上所述,本研究的成果对X射线脉冲星追踪和定位有重要意义,对于推动航天技术的发展和深入研究宇宙起到至关重要的作用。
第八章航天器自主导航与案例分析本章首先对航天器自主导航的概念和方法、航天器自主导航技术与系统的发展进行了简要介绍;然后,结合国外几个典型的先进航天器技术在轨飞行演示验证计划(项目),对其自主导航、指导与控制系统方案进行了分析。
8.1 航天器自主导航的方法航天器导航技术是航天器制导、导航与控制(GNC)技术的重要组成部分。
航天器GNC 技术是使航天器到达或保持在预定轨道,或到达预定状态所需的航天器运动状态参数的测量与确定技术、轨道控制技术和姿态控制技术的集成,是航天器工程的一项核心技术。
测量与确定技术是采用测量装置进行测量并对测量信息进行处理,得到航天器运动状态参数的技术,包括导航技术和姿态确定技术等。
航天器导航是指采用某种测量方式,对导航敏感器的测量数据进行实时处理和计算,确定航天器在当前时刻相对于给定参考系的导航参数或轨道参数。
航天器导航也称为轨道确定。
按照轨道控制或制导的要求不同,导航系统给出不同形式的导航参数。
轨道确定利用地面站的测量数据,或导航卫星数据,或其他星载导航敏感器的测量数据,确定航天器的6个轨道要素,或它在地心惯性坐标系中的3个位置分量和3个速度分量。
航天器交会对接、编队飞行等的控制需要相对导航,即利用(相对)导航敏感器的测量信息,确定航天器之间的相对运动参数,它们可以是在航天器轨道坐标系中的位置分量和速度分量,也可以是在视线坐标系中的距离、方位角和俯仰角及它们的变化率,有时还包括相对姿态和它们的变化率。
按获取测量信息的方式,航天器的导航有惯性导航、无线电导航、光学导航(包括大多数天文导航)、地磁导航和组合导航等多种。
目前,国内外航天器的导航大多是依靠地面设备完成的。
通过光学测量系统和无线电测量系统对航天器进行跟踪测量,地面计算机确定航天器的轨道和位置,经上行遥控发射设备将运动参数注入航天器并发出控制指令。
随着航天任务的发展,对航天器运行提出了自主性和自动化要求。
而航天器要实现自主、自动,首先要求实现自主导航。
X射线脉冲星自主导航的光传播时间方程
孙维瑾;费保俊;肖昱;季诚响
【期刊名称】《天文学报》
【年(卷),期】2008(049)002
【摘要】详细讨论了X射线脉冲星自主导航系统的广义相对论效应,采用DSX体系的后牛顿近似方法,计算出1PN度规下的光线弯曲轨迹和时间延缓以及2PN度规下的引力延缓,得到X射线脉冲自主导航的高精度测量方程.
【总页数】9页(P198-206)
【作者】孙维瑾;费保俊;肖昱;季诚响
【作者单位】装甲兵工程学院基础部,北京,100072;装甲兵工程学院基础部,北京,100072;装甲兵工程学院基础部,北京,100072;装甲兵工程学院基础部,北
京,100072
【正文语种】中文
【中图分类】P131;
【相关文献】
1.基于X射线脉冲星的月球卫星自主导航 [J], 姚翔;吴盘龙;陈尚敏
2.航天器高精度自主导航技术——基于X射线脉冲星的组合导航系统方案 [J], 帅平
3.X射线脉冲星自主导航的卫星运动方程 [J], 费保俊;潘高田;肖昱;韩春好
4.关于X射线脉冲星自主导航的位置观测方程 [J], 姚国政;费保俊;肖昱
5.差分X射线脉冲星自主导航研究 [J], 邓新坪;郑建华;高东
因版权原因,仅展示原文概要,查看原文内容请购买。
脉冲星自主导航概述杨廷高1,南仁东2,金乘进2,甘恒谦2(1 中科院国家授时中心陕西省临潼 710600)(2 中科院国家天文台北京 100012)摘要摘要:脉冲星自转非常稳定,可以用作时间标准,许多脉冲星的空间位置、自行、距离、自转周期及导数、自转的初始相位等天体测量和天体物理参数都被精确测定。
由于脉冲星能够同时提供时间信号和空间位置坐标,利用空间脉冲星网络的导航系统的开发研究受到重视。
除甚长基线干涉测量之外,空间飞行器导航的传统方法只在沿飞行器的视线方向提供高精度,且当太阳位于空间飞行器与地球中间时根本无法实现导航。
安装在空间飞行器上的脉冲星导航系统能够实现飞行器的自主导航,能给出空间飞行器相对于太阳系质心的三维坐标和飞行速度。
射电脉冲星自主导航系统只适用于载荷量大的空间飞行器,而X射线脉冲星未来的适用范围可能非常广阔。
讨论了脉冲星钟的模型和脉冲星导航系统的框架结构,介绍了脉冲星导航的基本原理和算法。
目前,已发现射电脉冲星约1750颗,X射线脉冲星50余颗。
利用脉冲星钟模型能高精度地预报脉冲星脉冲到达太阳系质心的时间,即在任何时刻,脉冲星相当于太阳系质心的相位是可以预报的。
在空间飞行器上测量脉冲星脉冲的到达时间(即脉冲星自转相位测量)所得到的相位与该脉冲星相对于太阳系质心的相位(脉冲星钟预报的相位)之间的差值包含有空间飞行器的位置信息。
通过空间飞行器上脉冲星导航系统对多颗脉冲星的计时观测(相位测量),就能解算出观测时刻空间飞行器相对于太阳系质心的位置坐标。
指出脉冲星导航系统采用的脉冲星探测器的性能决定了脉冲星相位的测量精度,这也是影响空间飞行器位置解算精度的关键因素。
脉冲星导航观测采用的原子钟如果足够稳定,则空间飞行器位置的算法可以简化。
在脉冲星导航系统计时观测接近微秒(sµ)量级时,脉冲星视差、Shapiro和Einstein延迟的影响是不可忽略的。
对于这样的脉冲星导航系统开发设计中的关键技术和应该进一步研究的主要问题进行了初步分析和讨论。
关键词 脉冲星—脉冲星钟—空间飞行器—定位导航1 引言脉冲星自转非常稳定,可以用作时间标准[1-3]。
由于脉冲星能够同时提供时间信号和空间位置坐标,利用空间脉冲星网络的导航系统的开发研究受到重视[4,5]。
安装在空间飞行器上的脉冲星导航系统能够实现飞行器的自主导航,不需要庞大地面系统的支持,更具有安全性。
目前,已发现射电脉冲星约1750颗,X射线脉冲星50余颗。
并且,脉冲星的搜寻工作正在深入开展,有望发现更好、更多适合导航用的脉冲星[6]。
2 脉冲星钟模型的建立以射电脉冲星为例说明脉冲星钟模型的建立。
将地面观测站观测得到的脉冲星脉冲到达时间(TOA)转换到太阳系质心,设t 为测站观测得到的TOA 值,脉冲星脉冲到达太阳系质心的时间为b t ,有ρνv c ur r c GM D C ur r cd c ur t t b 232221)ln(2])([21+−−−∆+−−+=Θ (1) 式中[7-11],u 是太阳系质心至脉冲星的单位矢量,r 是太阳系质心至测站的矢量,c 是光速,d 是脉冲星的距离,等式右边第二和第三项之和被称为Roemer 延迟。
C ∆是TOA 测量参考的原子钟的改正。
等式右边第五项为信号经过星际介质的色散延迟,其中D 是色散常数,ν是射电观测频率。
第六项是Shapiro 延迟,其中G 是引力常数,ΘM 是太阳的质量。
最后一项是Einstein 延迟,其中v 是地球公转速度矢量,ρ是脉冲星信号传播方向矢量。
按照(1)式将TOA 转换到太阳系质心后,脉冲星在t 时刻相对于太阳系质心的相位可表示为∑=++−+−+=Mm m m m T t f T t f T t 110)(00)!1()()()()(φφ (2)式中,)(0T φ为参考历元0T 时的脉冲星相位,f 为脉冲星在0T 时的自转频率,)(m f 为f 的m 阶导数(一般取3,2,1=m )。
利用(1)和(2)式,对计时观测得到的TOA 资料(时间跨度需要2至3年)进行拟合,最终得到脉冲星的自转参数()(0T φ、f 和)(m f )和天体测量参数(位置、自行和距离)[9-12]。
一旦这些参数精确测定,我们就可以用这些参数按照(2)式建立该脉冲星的自转模型,即脉冲星钟模型。
反过来,由建立的脉冲星钟模型,可以预报任何时刻t 时该脉冲星相对于太阳系质心的自转相位。
3 脉冲星导航原理和算法脉冲星导航的主要硬件设备是脉冲星计时观测设备、原子钟和观测控制、信息处理、计算用的计算机。
主要软件包括脉冲星自转相位(也习惯地称作TOA )测量软件和空间飞行器位置计算软件。
3.1 脉冲星导航原理和算法简述根据脉冲星钟模型(2)式,可以预报第n 颗脉冲星在t 时刻相对于太阳系质心的自转相位)(t s n φ。
在t 时刻,在空间飞行器上测量得到的第n 颗脉冲星的自转相位可表示为nn n s n x n m t t φϖτφφ++−=)()(ˆ (3) 式中,n τ是在空间飞行器上测得的相位相对于太阳系质心相位的时间延迟,参见图1。
在空间飞行器上测得的相位值只能是0至1周之间的任何小数值,而实际上脉冲星的相位变化还应包含有n m 个整周数,n m 为待定整数,被称为脉冲模糊点。
n φϖ是在飞行器上对第n 颗脉冲星相位测量的误差。
时的相位d/D pD p =c/f n0’+(t-T ’0)时,脉冲星波阵面图1 相位延迟示意图图1给出了在)('0'0T t T t −+=时刻,在飞行器上测得的第n 颗脉冲星的自转相位相对于该脉冲星钟预报的同一时刻太阳系质心相位的延迟量。
图中,n u 为脉冲星方向,x 为空间飞行器相对于太阳系质心的位置矢量。
用空间距离表示的该脉冲星的自转周期n p f c D /=,其中c 是光速,n f 是其自转频率。
)('0'0T t T t −+=,其中'0T 为空间飞行器上原子钟的钟面时刻,'0T 接近于t 。
由图1可见,第n 颗脉冲星的相位延迟n τ等于飞行器位置矢量在脉冲星方向的投影。
n τ可表示为x u c T n n 1=τ (4) 式中c 是光速,n u 为太阳系质心至第n 颗脉冲星的单位矢量,x 为空间飞行器相对于太阳系质量心的位置矢量,T 表示矩阵转置。
令'0T 为与t 接近的飞行器上原子钟的钟面时刻,由(2)、(3)、(4)式可得到n n T n n s n x n m x u cT t f T t φϖφφ++−−+=)1()()(ˆ'0'0 (5) 由于'0T 和t 非常接近,n f 导数的影响可以忽略不计。
(5)式中)('0T s n φ是'0T 时刻脉冲星相对于太阳系质心的相位,可由(2)式计算得到。
对(5)式进一步变换,有n n n n T n s n x n n n f m f x u ct T T t f φϖφφλ11'0'011))()(ˆ(−−−++−=+−= (6) 该式描述了观测量与未知参数(t 、x 和n m )之间的关系。
其中n λ是观测量)(ˆt x n φ的线性变换,等式右边为未知数t 、x 和n m ,n φϖ为脉冲星相位测量误差。
这里故意将t 设为未知量,目的是用于解决脉冲模糊点问题。
对于N 颗脉冲星的计时观测,可将(6)式写成矩阵形式。
为此,令⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=N λλλM 1, ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=T N T u c u c U 111M , ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=−−111000000N f f F O , ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=N m m m M 1, 则有,[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++⎥⎦⎤⎢⎣⎡−=N F Fm x t U N φφϖϖλM 11 (7) 再令 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=N F W φφλϖϖM 1,设m 为已知,其值为0m 向量(参见文中2.2 未知量m 的估计方法),最终,(7)式可写成,[]λλW x t U Fm N +⎥⎦⎤⎢⎣⎡−=−10 (8)λ的协方差矩阵[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==220000001N T W W E R λλλλλσσO (9) 其中,222n nn f φλϖσ−=。
采用最大似然方法(ML)估计空间飞行器的位置和其协方差矩阵[4],(8)式中未知数x 和t 的最大似然估计及其相应的协方差矩阵分别是[])(ˆ~0111Fm R A A R A x T T −=−−−λλλ (10) []11ˆ~−−=A R A R T x λ (11)这里,x ˆ~是未知参数向量x ~的最大似然估计,[]TT x t x =~,[]U A N −=1。
xR ˆ~是xˆ~的协方差矩阵,其对角线元素是被估计的参数的方差。
假定被观测的N 颗星的空间分布是近似均匀的,解算的飞行器位置的方差可近似表示为1222−=N P c x λσσ (12) 式中,λσ是N 颗脉冲星λσ的平均,c 是光速,P 是定位的维数,对于三维定位,3=P 。
上述是由单次计时观测解算飞行器位置的原理和算法。
如果对空间飞行器位置估计可用的时间足够大,采用连续多次观测求解飞行器位置的方案是必要的。
这种观测方案可同时求解飞行器的位置和速度。
3.2 未知量m 的估计方法对N 颗脉冲星,其自转整周数的值[]TN m m m L 1=。
假定空间飞行器在观测时刻t 的位置是在半径R 的球范围内,由此估计出m 向量的所有可能值(也称为脉冲模糊点)。
对三维定位,至少4颗脉冲星才能解出飞行器的位置和时间t 。
为减少计算量,首选4颗星的所有模糊点进行组合。
对于所有可能的组合,按(8)式解算出t 的估计值t ˆ及其误差t σ。
除去具有正确m 值的模糊点外,由大部分组合得到的t ˆ与原子钟读数t 之差的绝对值会明显大于解算误差,即 )(ˆt t t σα≥− (13) 式中α为门限参数,可取4,5,6等。
凡满足(13)的组合均为不正确的m 值,应该排除。
模拟解算表明,当610≤R 米时,上述办法能完全解决模糊点问题[4]。
如果R 更大,经过同样的处理后,仍会剩余一些没有排除的模糊点。
通过进一步计算这些模糊点上的最大似然函数的办法,可最终解决问题。
在首选4颗脉冲星的m 值确定后,由该4颗星解算出飞行器的位置及其误差x σ,这时,x σ的绝对值会远远小于初始采用的R 值。
对于剩余的所有脉冲星,再照上述处理方法,则很容易得到每颗星的正确m 值。
4 讨论4.1 计时观测设备性能射电观测设备主要是天线和接收机等,天线可选用螺旋形微带天线,天线和接收机有效载荷量比较大(观测N 颗星,需N 套同样设备)。