第六章 非线性微分方程和稳定性
- 格式:doc
- 大小:409.00 KB
- 文档页数:8
第六章 非线性微分方程和稳定性在19世纪中叶,通过刘维尔的工作,人们已经知道绝大多数的微分方程不能用初等积分方法求解.这个结果对于微分方程理论的发展产生了极大影响,使微分方程的研究发生了一个转折.既然初等积分法有着不可克服的局限性,那么是否可以不求微分方程的解,而是从微分方程本身来推断其解的性质呢?定性理论和稳定性理论正是在这种背景下发展起来的.前者由法国数学家庞加莱(Poincar é,1854-1912)在19世纪80年代所创立,后者由俄国数学家李雅普罗夫(Liapunov,1857-1918)在同年代所创立.它们共同的特点就是在不求出方程的解的情况下,直接根据微分方程本身的结构和特点,来研究其解的性质.由于这种方法的有效性,近一百多年以来它们已经成为常微分方程发展的主流.本章对定性理论和稳定性理论的一些基本概念和基本方法作一简单介绍.§6.1 引言考虑微分方程(,)d f t dt=xx (6.1)其中函数(,)f t x 对n D R ∈⊆x 和t ∈(-∞,+∞)连续,对x 满足局部李普希兹条件. 设方程(5.1)对初值(t 0,x 1)存在唯一解01(,,)x t t x ϕ=,而其它解记作00(,,)x x t t x =.现在的问题是:当01x x -很小时,差0001(,,)(,,)x t t x t t x ϕ-的变化是否也很小?本章向量1(,...,)Tn x x =x 的范数取1221()nii x ==∑x .如果所考虑的解的存在区间是有限闭区间,那么这是解对初值的连续依赖性,第2章的定理2.7已有结论.现在要考虑的是解的存在区间是无穷区间,那么解对初值不一定有连续依赖性(见下面的例3),这就产生了李雅普诺夫意义下的稳定性概念.如果对于任意给定的0ε>和00t ≥都存在0(,)0t δδε=>,使得只要0x 满足01δ-<x x就有0001(,,)(,,)t t t t ϕε-<x x x对一切t ≥t 0成立,则称(6.1)的解01(,,)t t x ϕ=x 是稳定的.否则是不稳定的.假设01(,,)t t ϕ=x x 是稳定的,而且存在11(0)δδδ<≤,使得只要0x 满足011δ-<x x就有0001lim((,,)(,,))0t t t t t ϕ→∞-=x x x则称(6.1)的解01(,,)t t ϕ=x x 是渐近稳定的.为了简化讨论,通常把解01(,,)t t ϕ=x x 的稳定性化成零解的稳定性问题.下面记00()(,,)t t t =x x x ,01()(,,)t t t ϕϕ=x 作如下变量代换.令()()y t t ϕ=-x (6.2) 则d dt y =()()(,())(,())d t d t f t t f t t dt dtϕϕ-=-x x (,())(,())(,)df t t f t t F t ϕϕ=+-=y y于是在变换(6.2)下,将方程(6.1)化成(,)d F t dt=yy (6.3)其中(,)(,())(,())F t f t t f t t ϕϕ=+-y y .这样关于(6.1)的解()t ϕ=x 的稳定性问题就化为(6.3)的零解y =O 的稳定性问题了.因此,我们可以在下文中只考虑(6.1)的零解x =O 的稳定性,即假设(,)f t O O ≡,并有如下定义:定义6.1 若对任意0ε>和00t ≥,存在0(,)t δδε=,使当0δ<x 时有 00(,,)t t ε<x x (6.4)对所有的0t t ≥成立,则称(6.1)的零解是稳定的.反之是不稳定的. 定义6.2 若(6.1)的零解是稳定的,且存在δ1>0, 使当01δ<x 时有00lim (,,)0t t t →∞=x x则称(6.1)的零解是渐近稳定的.例1 考察系统⎪⎩⎪⎨⎧-==x dtdyydt dx的零解的稳定性.解 对于一切0t ≥,方程组满足初始条件0(0)x x =,22000(0)(0)y y x y =+≠的解为 0000()cos sin ()sin cos x t x t y ty t x t y t=+⎧⎨=-+⎩ 对任一0ε>,取δε=,则当12220()x y δ+<时,有112222220000122200[()()][(cos sin )(sin cos )]()x t y t x t y t x t y t x y δε+=++-+=+<=故该系统的零解是稳定的.然而,由于112222220lim[()()]()0t x t y t x y →∞+=+≠所以该系统的零解不是渐近稳定的.例2 考察系统dxx dtdy y dt⎧=-⎪⎪⎨⎪=-⎪⎩ 的零解的稳定性.解 在0t ≥上,取初值为00(0,,)x y 的解为:00()()ttx t x e y t y e--⎧=⎨=-⎩ 其中22000x y +≠对任一0ε>,取δε=,则当12220()x y δ+<时,有1122222222122200[()()]()()(0)t t x t y t x ey ex y t δε--+=+≤+<=≥故该系的零解是稳定的. 又因为1122222222lim[()()]lim()0t t t t x t y t x ey e --→∞→∞+=+=可见该系统的零解是渐近稳定的.例3 考察系统dxx dtdy y dt⎧=⎪⎪⎨⎪=⎪⎩ 的零解的稳定性.解 方程组以00(0,,)x y 为初值的解为00()()ttx t x e y t y e ⎧=⎨=⎩(0)t ≥ 其中2200x y +≠. 111222222222220[()()]()()t t t x t y t x e y e x y e +=+=+由于函数e t 随t 的递增而无限地增大. 因此,对于任意0ε>,不管12220()x y +取得怎样小,只要t 取得适当大时,就不能保证1222[()()]x t y t +小于预先给定的正数ε,所以该系统的零解是不稳的.例4 考虑常系数线性微分方程组dxAx dt= (6.5)其中n x R ∈,A 是n ×n 阵.证明,若A 的所有特征根都具严格负实部,则(6.3)的零解是渐近稳定的.证明 不失一般性,我们取初始时刻00t =,设Φ(t )是(6.5)的标准基本解矩阵,由第3章内容知满足0(0)x x =的解()x t 可写成0()()x t t x =Φ (6.6)由A 的所有特征根都具负实部知lim ()0t t →∞Φ= (6.7)于是知存在t 1>0,使t >t 1时()1t Φ<.从而对任意0ε>,取0δε=则当00x δ<时,由(6.6)有00()()x t t x x ε≤Φ≤<, 1t t >(6.8)当t ∈[0,t 1]时, 由解对初值的连续相依性, 对上述0ε>,存在δ1 >0,当01x δ<时()x t O ε-<, 1[0,]t t ∈取01min{,}δδδ=,综合上面讨论知,当0x δ<时有()x t ε<, [0,]t ∈+∞即0x =是稳定的.由(6.7)知对任意0x 有0lim ()0t t x →∞Φ=,故0x =是渐近稳定的.。
第六章稳定性与李雅普诺夫(Lyapunov)方法6.1 概述研究平衡状态及其稳定性介绍两类解决稳定性问题的方法,即Lyapunov 第一法和Lyapunov第二法。
第一法通过求解微分方程的解来分析运动稳定性,即通过分析非线性系统线性化方程特征值分布来判别原非线性系统的稳定性;第二法则是一种定性方法,它无需求解的非线性微分方程,通过构造一个Lyapunov函数,研究它的正定性及其对时间的沿系统方程解的全导数的负定或半负定,来得到稳定性的结论。
一般我们所说的Lyapunov方法就是指Lyapunov第二法。
虽然在非线性系统的稳定性分析中,Lyapunov 稳定性理论具有基础性的地位,但在具体确定许多非线性系统的稳定性时,需要技巧和经验。
6.2 Lyapunov 意义下的稳定性问题一、 平衡状态、给定运动与扰动方程之原点考虑如下非线性系统),(t x f x = (6.1)式中x 为n 维状态向量,),(t x f 是变量1x ,2x ,…,n x 和t 的n 维向量函数。
假设在给定初始条件下,式(6.1)有唯一解),;(00t x t Φ,且当0t t =时,0x x =。
于是0000),;(x t x t =Φ在式(6.1)的系统中,总存在0),(≡t x f e , 对所有t (6.2)则称e x 为系统的平衡状态或平衡点。
如果系统是线性定常的即 Ax t x f =),(当A 为非奇异矩阵时,系统存在一个唯一的平衡状态0=e x ;当A 为奇异矩阵时,系统将存在无穷多个平衡状态。
对于非线性系统,则有一个或多个平衡状态,这些状态对应于系统的常值解(对所有t ,总存在e x x =)。
任意一个孤立的平衡状态(即彼此孤立的平衡状态)或给定运动)(t x φ=都可通过坐标变换,统一化为扰动方程),~(~~t x f x = 之坐标原点,即0),0(~=t f 或0~=e x 。
在本章中,除非特别申明,我们将仅讨论扰动方程关于原点处之平衡状态的稳定性问题。
微分方程的稳定性与全局解的存在性微分方程是数学中的重要概念,广泛应用于物理学、工程学、经济学等领域。
对于微分方程的研究,稳定性与全局解的存在性是两个重要的问题。
本文将针对微分方程的稳定性与全局解的存在性展开讨论,并探讨它们在应用中的意义。
一、稳定性分析稳定性是指微分方程解的行为在微小扰动下是否保持不变。
对于一阶线性微分方程,稳定性可通过特征值的符号来判断。
具体而言,若特征值的实部均小于零,则系统稳定;若存在大于零的实部特征值,则系统不稳定。
对于高阶非线性微分方程,稳定性的分析相对复杂。
一种常用方法是通过线性化系统来研究非线性系统的稳定性。
线性化系统是在非线性系统的稳定点附近对非线性系统进行线性逼近得到的系统。
通过分析线性化系统的特征值,可以判断非线性系统的局部稳定性。
二、全局解的存在性全局解是指微分方程在整个定义域上存在且唯一的解。
对于一阶线性微分方程,全局解的存在性一般能得到保证。
而对于非线性微分方程,全局解的存在性则需要满足一定的条件。
全局解的存在性与定理有关。
例如,一个常用的定理是皮卡-里普丝定理(Picard-Lindelöf Theorem),该定理保证了一阶常微分方程在给定条件下存在唯一的全局解。
另外,拉格朗日平均值定理(MeanValue Theorem)也是分析全局解存在性的有用工具。
除了定理,数值方法也可以用来求解微分方程的全局解。
例如,常用的欧拉方法、龙格-库塔方法等数值方法能够逼近微分方程的全局解。
这些数值方法在实际应用中具有重要意义,特别是对于复杂的非线性微分方程。
三、稳定性与全局解的应用意义微分方程的稳定性和全局解的存在性在科学与工程中具有广泛的应用价值。
以下列举几个具体的应用领域:1. 物理学:微分方程广泛应用于物理学中的运动学、电磁学、热力学等领域。
通过稳定性分析和全局解的存在性可以确定物理系统的稳定性和行为。
2. 工程学:微分方程被应用于工程学中的控制系统、信号处理、电路等领域。
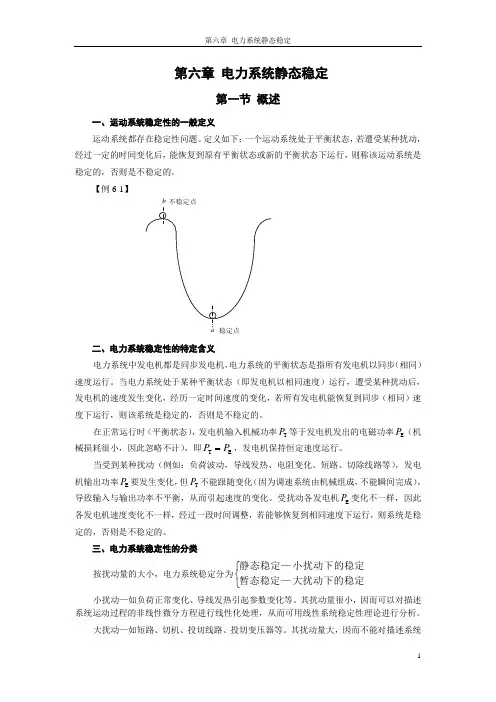
第六章 电力系统静态稳定第一节 概述一、运动系统稳定性的一般定义运动系统都存在稳定性问题。
定义如下:一个运动系统处于平衡状态,若遭受某种扰动,经过一定的时间变化后,能恢复到原有平衡状态或新的平衡状态下运行,则称该运动系统是稳定的,否则是不稳定的。
【例6-1】b二、电力系统稳定性的特定含义电力系统中发电机都是同步发电机,电力系统的平衡状态是指所有发电机以同步(相同)速度运行。
当电力系统处于某种平衡状态(即发电机以相同速度)运行,遭受某种扰动后,发电机的速度发生变化,经历一定时间速度的变化,若所有发电机能恢复到同步(相同)速度下运行,则该系统是稳定的,否则是不稳定的。
在正常运行时(平衡状态),发电机输入机械功率T P 等于发电机发出的电磁功率E P (机械损耗很小,因此忽略不计),即E T P P =,发电机保持恒定速度运行。
当受到某种扰动(例如:负荷波动,导线发热、电阻变化、短路、切除线路等),发电机输出功率E P 要发生变化,但T P 不能跟随变化(因为调速系统由机械组成,不能瞬间完成),导致输入与输出功率不平衡,从而引起速度的变化。
受扰动各发电机E P 变化不一样,因此各发电机速度变化不一样,经过一段时间调整,若能够恢复到相同速度下运行,则系统是稳定的,否则是不稳定的。
三、电力系统稳定性的分类按扰动量的大小,电力系统稳定分为⎩⎨⎧大扰动下的稳定—暂态稳定小扰动下的稳定—静态稳定小扰动—如负荷正常变化、导线发热引起参数变化等。
其扰动量很小,因而可以对描述系统运动过程的非线性微分方程进行线性化处理,从而可用线性系统稳定性理论进行分析。
大扰动—如短路、切机、投切线路、投切变压器等。
其扰动量大,因而不能对描述系统运动过程的非线性微分方程进行线性化处理,从而只能用非线性系统稳定性理论进行分析。
四、如何判别稳定1. 以速度,即各机组频率。
2. 以相对转子位置角)(ij t δ的变化过程,即摇摆曲线。
若)(ij t δ能够回复到某一个稳定值则系统是稳定的。
非线性微分方程解的稳定性非线性微分方程解的稳定性是数学物理等多个学科面对微分方程解时所要考虑的重要问题。
一、非线性微分方程解的稳定性1. 含有稳定性的概念非线性微分方程求解的稳定性是指改变求解方法或迭代步长时,得到的求解结果的差异是限定的范围,从而确定所使用的解法或迭代过程的可靠性。
2. 非线性微分方程求解的稳定性判断求解非线性微分方程的稳定性主要判断其所使用的解法的收敛性以及使用的迭代步长的可靠性。
二、影响非线性微分方程解稳定性的因素1. 微分方程本身特征由于求解非线性微分方程的过程是多参数的复杂迭代运算,它本身的复杂性也影响了求解的稳定性。
如方程的阶数较高、参数较多等,它们会加大求解过程的难度,影响对结果的准确性及稳定性。
2. 求解方法的限制由于当下的求解方法还不能充分支撑求解非线性微分方程解过程,因而会造成求解结果的不稳定性。
3. 天气因素除了方程本身及求解方法等原因之外,天气因素也会直接影响非线性微分方程求解的稳定性,对天气变化的相关参数实时的监测和分析,及时调整迭代过程的参数设置,也是影响求解稳定性的一个重要因素。
三、维持非线性微分方程解稳定性1. 加强数值分析求解非线性微分方程时可以使用更加先进、准确的数值分析技术,分析问题的不确定性等,进行参数预估,从而可以稳定微分方程求解的结果。
2. 针对性修改求解方法多种求解方法可以在一定程度上修正或调节求解结果的不稳定性,以及减轻重要的误差,从而避免非线性微分方程求解的稳定性出现明显的变化。
3. 建立状态变化分析模型根据各参数的变化和影响,建立状态变化分析模型,可以更好地把握系统的运行情况变化,从而保证非线性微分方程解的稳定性。
四、总结微分方程求解的稳定性是指求解结果随参数变化或求解方法变化的差异,其稳定性的确定及提高是面对此类问题必须认真考虑的,应通过加强数值分析,针对性修改求解方法,建立状态变化分析模型等多种方法,以确保非线性微分方程求解的稳定性及准确性。

第六章 非线性微分方程和稳定性6-1 对下列方程求出常数特解,并且画出方程经过()0,0x 的积分曲线的走向,从而判断各驻定解的稳定性;然后作变量替换,使非零驻定解对应于新的方程的零解。
1)+∞<<-∞>>+=02,0,0,x B A Bx Ax dtdx 2)()()0,310≥--=x x x x dtdx 解 1)方程可化为 )(x BA Bx dt dx +=,则其常数特解为B A x x -==21,0,即为驻定解。
由于方程为分离变量方程(或迫努利方程),当BA x x -≠≠,0时,分离变量得 Adt dxB A x x =⎪⎪⎪⎪⎭⎫ ⎝⎛+-11 方程的通解为At Ce BxA x =+ 利用初始条件()⎪⎭⎫ ⎝⎛-≠≠=B A x x x x 000,00,得 00Bx A x C +=,故得原方程满足初始条件的解为()0)(0≥⎪⎪⎭⎫ ⎝⎛++-=-t e B x A B At x At(1) 由式(1)和方程右端的表达式,得出当00>x 时,0>dt dx ,)(t x 递增, 又 B e B x A B B x A At →⎪⎪⎭⎫ ⎝⎛+->+-00,时,+∞→)(t x , 即)1ln(10+=→B x A A t t 时,+∞→)(t x 。
当 ⎪⎪⎩⎪⎪⎨⎧<-><+>-<>+<000,0000000 dt dx ,B A x , B x A dt dx ,B A x B x A x 时,有 ()+∞→-→t BA t x )( 所以解(1)的图像如图6-5所示。
图6-5从解的图像可以看出:解01=x 不稳定;解B A x -=2稳定。
利用变换BA x y +=,可将原方程化为 22)()(By Ay BA yB B A y A dt dy +-=-+-= 所以原方程的驻定解BA x -=2对应于方程 2By Ay dtdy +-= 的零解0=y 。
第六章 非线性微分方程和稳定性研究对象二阶驻定方程组(自治系统)⎪⎪⎩⎪⎪⎨⎧==),(),(y x Y dtdy y x X dtdx1 基本概念 1)稳定性 考虑方程组),(x f xt dtd = (6.1) 其中 ⎪⎪⎪⎪⎪⎭⎫⎝⎛=n x x x21x ,⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=dtdxdt dx dt dx dt d n 21x ,⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=),,,;(),,,;(),,,;()(21212211n n n n x x x t f x x x t f x x x t f x f 。
总假设),(x f t 在D I ⨯上连续,且关于x 满足局部李普希兹条件,R I ⊂,区域nR D ⊂,00=),(t f ,∑==ni ix12x 。
如果对任意给定的0>ε,存在0)(>εδ(一般ε与0t 有关),使得当任一0x 满足δ≤0x 时,方程组(6.1)满足初始条件00)(x x =t 的解)(t x ,均有εx <)(t 对一切0t t ≥成立,则称方程组(6.1)的零解0=x 为稳定的。
如果方程组(6.1)的零解0=x 稳定,且存在这样的00>δ,使当00δ<x 时,满足初始条件00)(x x =t 的解)(t x 均有0=+∞→)(lim t t x ,则称零解0=x 为渐近稳定的。
如果0=x 渐近稳定,且存在域0D ,当且仅当00D ∈∀x 时满足初始条件00)(x x =t 的解均有0=+∞→)(lim t t x ,则称域0D 为(渐近)稳定域或吸引域;如果稳定域为全空间,即+∞=0δ,则称零解0=x 为全局渐近稳定的或简称全局稳定的。
当零解0=x 不是稳定时,称它为不稳定的。
即就是说:如果对某个给定的0>ε,不论0>δ怎样小,总有一个0x 满足δx ≤0,使得由初始条件00)(x x =t 所确定的解)(t x ,至少存在某个01t t >使得εt =)(1x ,则称方程组(6.1)的零解0=x 为不稳定的。
注:非零解的稳定性可以通过平移变换后转化为零解稳定性问题来讨论。
2)相平面与轨线考虑二阶非自治微分方程组),;(),;(⎪⎪⎩⎪⎪⎨⎧==y x t Y dtdy y x t X dtdx(6.2) 它的解)(),(t y y t x x ==在以y x t ,,为坐标的(欧氏)空间中决定了一条曲线,这条曲线称为积分曲线。
如果把时间t 当作参数,仅考虑y x ,为坐标的(欧氏)空间,此空间称为方程组(6.2)的相平面,若方程组是含三个以上未知函数的,则称为相空间。
在相平面(相空间)中方程组的解所确定的曲线称为轨线。
3)奇点与常点如果方程组(6.2)是驻定方程组(或称为自治系统),即其右端函数不显含时间t 。
此时(6.2)式变成),(),(⎪⎪⎩⎪⎪⎨⎧==y x Y dtdy y x X dtdx(6.3) 满足方程组⎩⎨⎧==0),(0),(y x Y y x X 的点*)*,(y x ,即满足0*)*,(*)*,(22=+y x Y y x X 的点,称为方程组(6.3)的奇点(或平衡点),否则称为常点。
4)周期解、闭轨和极限环平面自治系统(6.3)的周期解在相平面上对应的轨线称之为闭轨线,简称闭轨。
若在闭轨C 的充分小的邻域中, 除C 之外,再无其它闭轨,称C 为孤立闭轨。
如果在孤立闭轨C 的充分小的邻域中出发的非闭轨线,当+∞→t (或-∞→t )都分别盘旋地趋于闭轨C ,则称它为系统(6.3)的极限环。
极限环C 将平面分为两个区域:内域和外域。
当极限环附近的轨线均正向(即+∞→t 时)趋近于它时,称此极限环为稳定的。
如果轨线均负向(即-∞→t 时)趋近于此极限环时,则称它为不稳定的。
当此极限环的一侧轨线正向趋近于它,而另一侧轨线负向趋近于它时,此极限环称为半稳定的。
5)李雅普诺夫(Liapunov)函数(V 函数) 考虑非线性的自治微分方程组00 ==)()(f x f xdtd (6.4) 假设)(x f 在某区域A D ≤x :(A 为正常数)内具有连续一阶偏导数。
设函数),,,()(21n x x x V V =x 在域A H D ≤≤x :1上具有连续偏导数,且0)(=0V ,a )若在1D 上,恒有0)(≥x V ,则称函数)(x V 为常正的;b )若在A H x D ≤≤<0:}{\10上,0)(>x V ,则称函数)(x V 为定正的;c )若在1D 上,恒有0)(≤x V ,则称函数)(x V 为常负的;d )若在A H x D ≤≤<0:}{\10上,0)(<x V ,则称函数)(x V 为定负的;e )若)(x V 在原点)0,,0,0( O 的任一邻域内既可取正值又可取负值,则称)(x V 为变号函数。
常正、常负函数统称为常号函数;定正、定负函数统称为定号函数。
以上定义的函数为 李雅普诺夫函数(V 函数)。
6)全导数设函数)(x V 在原点O 的邻域内连续可微,把函数dt dV),,,(211n i ni ix x x f x V ∑=∂∂= 称为)(x V 关于系统(6.4)的对时间t 的全导数,记为)4.6(dtdV,特别地,如果系统已明确(或不易混淆),符号)4.6(dtdV的下标可略去。
2 基本理论与基本方法 1)平面系统的奇点分类二维线性自治系统的一般形式为⎪⎪⎩⎪⎪⎨⎧+=+=dy cx dtdy by ax dtdx(6.5) 它的系数矩阵⎪⎪⎭⎫ ⎝⎛=d c b a A ,其特征方程是0)()(2=-++-=--bc ad d a d cb a λλλλ。
将特征方程改写为02=++q p λλ,其中bc ad q d a p -==+-=-=A A det ),(tr 。
若0≠q ,)0,0(O 是(6.5)的唯一奇点,称)0,0(O 为初等奇点,0=q 时, 称)0,0(O 为高阶奇点。
我们主要研究初等奇点的性态。
定理 6.1 对于系统(6.5),当0≠-==bc ad dcb a q 时,)0,0(O 是它的唯一初等奇点(简称为奇点),21,λλ为矩阵⎪⎪⎭⎫⎝⎛=d c b a A 的不为零的特征根,则可以根据特征根的不同情况将奇点)0,0(O 分为以下类型:a )若21λλ≠都是实数,且021>λλ,则当0,021<<λλ时,)0,0(O 为稳定结点;当0,021>>λλ时,)0,0(O 为不稳定结点。
b )若21λλ≠都是实数,且021<λλ,则)0,0(O 为鞍点。
c )若21λλ=,则当021<=λλ时,)0,0(O 为稳定奇结点或退化结点,当021>=λλ时,)0,0(O 为不稳定奇结点或退化结点。
d )21,λλ为一对共轭复根,则当0Re 1<λ时,)0,0(O 为稳定焦点;当0Re 1>λ时,)0,0(O 为不稳定焦点;当0Re 1=λ时,)0,0(O 为中心。
注:奇结点(也称临界结点)是它周围的轨线均沿确定的方向趋于(或远离)它,且不同轨线切向也异。
若特征根21λλ=的初等因子的次数为1,则对应临界结点,初等因子的次数为2,则对应退化结点。
定理6.2 设)0,0(O 为方程组⎪⎪⎩⎪⎪⎨⎧++=++=),(),(y x Y dy cx dtdy y x X by ax dtdx(6.6) 的孤立奇点,若),(y x X ,),(y x Y 满足条件)a 在奇点)0,0(O 的邻域内有连续的一阶偏导数; )b )(),(r o y x X =,)(),(r o y x Y =,22y x r +=。
则如果)0,0(O 是对应线性系统(6.5)的结点、焦点或鞍点,那么)0,0(O 也是非线性系统(6.6)的同类型奇点。
2)稳定性定理与方法方法1常系数线性系统稳定性判定 一般地,n 维常系数线性微分方程组Ax x=dtd (6.7) 其中A 为n 阶常数矩阵。
方程组(6.7)的特征方程为0)λdet(=-E A (6.8)。
定理6.3 若特征方程(6.8)的根均具有负实部,则方程组(6.7)的零解是渐近稳定的。
若特征方程(6.8)具有正实部的根,则方程组(6.7)的零解是不稳定的。
若特征方程(6.8)没有正实部的根,但有零根或具零实部的根,则方程组(6.7)的零解可能是稳定的也可能是不稳定的,这要看零根或具零实部的根其初等因子的次数是否等于1而定。
定理6.4 设给定常系数的n 次代数方程0122110=+++++---n n n n n a λa λa λa λa其中00>a ,作行列式,,2301211a a a a a =∆=∆,0345123013a a a a a a a a =∆, 142322212123010000-----∆==∆n n nn n n n n a a a a a a a a a a a,这里)(,0n i a i >∀=。
那么,所给代数方程的一切根均有负实部的充分必要条件是下列不等式同时成立:00>a ,01>∆,02>∆,, 01>∆-n ,0>∆n 。
注意:这是霍维兹(Hurwitz )定理,用来判别代数方程根的实部是否均为负。
方法2 一次(线性)近似系统稳定性判定 若非线性微分方程组)(x R Ax x+=dtd (6.9) 满足条件0)(→xx R ,当0→x 时。
显然0=x 是方程组(6.9)的解。
方程组(6.9)对应的线性方程组Ax x=dtd (6.7) 称为方程组(6.9)的一次近似系统(或线性近似系统)。
定理6.5 若特征方程(6.8)没有零根或零实部的根,则非线性方程组(6.9)的零解的稳定性与其线性近似系统(6.7)的零解的稳定性态一致。
这就是说,当特征方程(6.8)的根均具有负实部时方程组(6.9)的零解是渐近稳定的,而当特征方程具有正实部的根时,其零解是不稳定的。
方法3 李雅普诺夫第二方法(V 函数法)不必求出方程组的解,而通过构造一个具有特殊性质的函数)(x V (李雅普诺夫函数或V 函数)及其通过方程组的全导数dtdV )(x 的性质,来确定方程组解的稳定性。
这种方法称为李雅普诺夫第二方法。
以下两个定理是这个方法的具体实现。
定理6.6(李雅普诺夫稳定性定理) 对于微分方程组)(x f x=dtd ,00=)(f (6.4) 如果有定正函数)(x V ,其通过(6.4)的全导数dtdV为常负函数或恒等于零,则方程组(6.4)的零解是稳定的;如果有定正函数)(x V ,其通过(6.4)的全导数dtdV为定负函数,则方程组(6.4)的零解是渐近稳定的;如果存在函数)(x V 和某非负常数μ,而通过(6.4)的全导数dtdV可以表示为 )(x W V dtdV+=μ,且当0=μ时W 为定正函数,而当0≠μ时W 为常正函数或恒等于零;又在0=x 的任意小邻域内都至少存在某个x ,使0)(>x V ,则方程组(6.4)的零解是不稳定的。