车辆主动悬架协调控制技术研究
- 格式:pdf
- 大小:734.12 KB
- 文档页数:4
汽车悬挂系统的主动控制研究近年来,汽车悬挂系统的主动控制技术日益成熟,成为汽车行业的一个热门研究领域。
汽车悬挂系统的主动控制技术可以对汽车的悬挂系统进行精细化的调节和控制,提高汽车的舒适性、稳定性和安全性。
汽车悬挂系统的主动控制技术的核心是控制算法。
现代汽车悬挂系统采用了许多先进的传感器和控制器,可以实时测量和分析车辆的运动状态和车身姿态,通过计算机控制算法对悬挂系统的刚度、阻尼、高度等参数进行精准调整,以适应不同路况和驾驶条件。
主动控制技术可以根据车速、路面质量、载荷、弯道等多种因素实时调整悬挂系统的参数,使驾驶员和乘客的舒适度和安全性得到提升。
在汽车悬挂系统的主动控制技术中,主要有三种基本类型:主动悬挂、半主动悬挂和电子悬挂。
主动悬挂是指悬挂系统可根据路况和行驶状态主动调整刚度和阻尼,提供最佳的车身控制和舒适性。
半主动悬挂主要是指在保留传统悬挂系统的基础上,通过传感器和控制器实时调整阻尼来提高车辆的稳定性。
电子悬挂则采用了更先进的电子控制技术,它能根据通过传感器收集到的各种数据来自动控制悬挂系统的刚度、阻尼和高度等参数。
汽车悬挂系统的主动控制技术可以帮助各种类型的汽车提高性能和舒适性。
在高性能汽车中,主动悬挂系统可以提供更加精确和快速的车辆控制,帮助驾驶员更好地处理车辆在高速行驶和高强度驾驶时的操控。
在家用车型中,主动悬挂系统可以提供更加平稳和舒适的驾驶体验,减少车辆颠簸和颠簸对驾驶员和乘客的不适感。
需要注意的是,汽车悬挂系统的主动控制技术虽然可以提高汽车的性能和舒适性,但也需要消费者具备一定的技术知识和技能才能操作和维护。
在购买搭载主动控制技术的汽车时,消费者需要了解相关的技术细节和操作指南,并且必须经过专业的培训和考核,才能合理使用和维护这些先进的汽车悬挂系统。
综上所述,汽车悬挂系统的主动控制技术是一项前沿的汽车技术,它可以提高汽车的性能、舒适性和安全性,为汽车行业的发展注入了新的活力。
汽车悬挂系统的主动控制研究随着社会经济的发展和人们对行车安全和舒适性的要求提高,汽车悬挂系统的研究和发展成为一个热门的课题。
传统的汽车悬挂系统主要由弹簧和减振器组成,其主要作用是缓冲和减震车身的激励。
随着科技的进步和电子控制技术的发展,主动悬挂系统逐渐成为一种新的选择。
主动悬挂系统通过传感器感知车身和路面的状态,并利用电子控制单元(ECU)控制悬挂系统的参数和工作方式。
主动悬挂系统可以根据道路情况和车速自动调节悬挂刚度和减震器的阻尼力,以实现更好的悬挂效果。
主动悬挂系统的研究主要集中在以下几个方面:1. 主动悬挂系统的动力学模型:研究主动悬挂系统的动力学特性,建立合理的模型,以便后续的控制算法设计和仿真分析。
2. 车身姿态控制:主动悬挂系统可以通过调节车身的姿态来改善车辆的稳定性和驾驶性能。
研究者通过设计反馈控制算法,使主动悬挂系统能够实时调节悬挂刚度和减震器的阻尼力,以实现车身的主动控制。
3. 路面感知和状态估计:主动悬挂系统需要通过传感器感知车辆行驶的路面情况,并对路面的状态进行估计。
研究者通过使用加速度计、角度传感器和车轮转角传感器等传感器,实时获取车身和路面的状态信息。
4. 控制算法设计和优化:主动悬挂系统的控制算法设计非常重要,可以通过设计合理的控制策略来提高悬挂系统的性能。
研究者通过使用PID控制算法、模糊控制算法和神经网络等方法,优化主动悬挂系统的控制策略。
5. 实验验证和性能评估:研究者通过在实际车辆上安装主动悬挂系统,并进行实地测试和性能评估,验证研究成果的可行性和有效性。
汽车悬挂系统的主动控制研究是一个复杂而有挑战性的领域,涉及多学科的知识和技术。
随着科技的不断进步,主动悬挂系统将会在未来得到更广泛的应用,为驾驶人提供更安全、舒适和平稳的行车体验。
《基于多算法融合的汽车主动悬架预瞄控制研究》篇一一、引言汽车主动悬架系统是现代汽车技术的重要组成部分,其性能直接关系到车辆的行驶平稳性、乘坐舒适度以及操控稳定性。
随着科技的发展,多算法融合技术为汽车主动悬架控制提供了新的研究思路。
本文将针对基于多算法融合的汽车主动悬架预瞄控制进行研究,以提高汽车悬架系统的性能。
二、汽车主动悬架系统概述汽车主动悬架系统是一种能够主动调节悬挂刚度和阻尼的悬架系统,通过实时感知路面状况和车辆状态信息,主动调整悬挂参数,以实现更好的行驶性能。
然而,传统的主动悬架控制系统往往存在响应速度慢、稳定性差等问题。
因此,如何提高汽车主动悬架控制系统的性能成为了一个亟待解决的问题。
三、多算法融合技术在汽车主动悬架控制中的应用多算法融合技术可以通过综合运用多种算法,实现对车辆状态和路况的更准确感知和预测,从而提高汽车主动悬架控制系统的性能。
具体而言,多算法融合技术包括以下几个方面:1. 预瞄控制算法:预瞄控制算法可以通过预测未来路况,提前调整悬架参数,提高车辆行驶的平稳性和舒适性。
2. 模糊控制算法:模糊控制算法可以根据车辆状态和路况信息,实时调整悬架参数,实现对车辆状态的精确控制。
3. 神经网络控制算法:神经网络控制算法可以通过学习大量数据,实现对车辆状态和路况的更准确预测和判断,进一步提高汽车主动悬架控制系统的性能。
在本文中,我们将研究如何将这三种算法进行有效融合,以实现对汽车主动悬架的更精确控制。
四、基于多算法融合的汽车主动悬架预瞄控制研究1. 系统模型建立:首先,我们需要建立汽车主动悬架系统的数学模型,包括车辆动力学模型、路况模型等。
这些模型将为我们后续的研究提供基础。
2. 预瞄控制算法研究:我们将研究预瞄控制算法在汽车主动悬架控制系统中的应用,通过预测未来路况,提前调整悬架参数,以提高车辆行驶的平稳性和舒适性。
3. 模糊控制和神经网络控制算法融合:我们将研究如何将模糊控制和神经网络控制算法进行有效融合,以实现对车辆状态的更精确控制和预测。
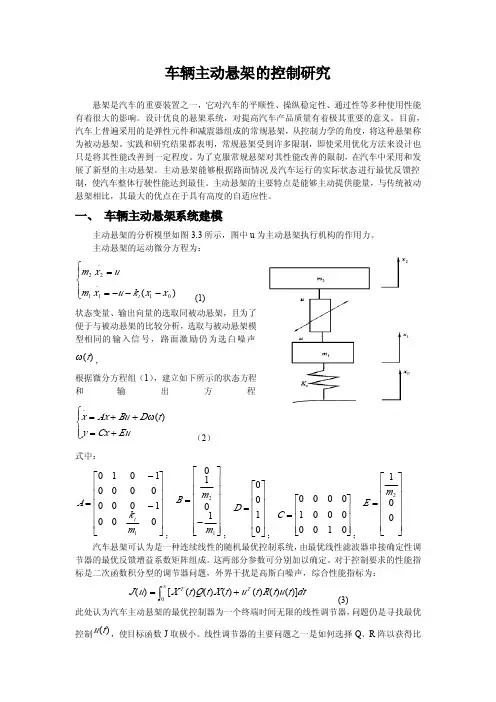
摘要作为整体车辆的重要组成部分,。
车辆悬架对汽车的各项性能(包括汽车操纵稳定性、行驶平顺性和行驶速度等)产生重大影响。
传统的被动悬架一般由具有阻尼元件和固定参数的弹性元件组成,被设计为适应某一种路面,不利于进一步提高车辆性能。
20世纪70年代工业发达国家已经开始研究基于振动主动控制的主动、半主动悬架系统。
近年来随着机械动力学、测控技术、电子技术等学科的快速发展,车辆悬架系统由传统被动隔振发展到新兴的振动主动控制。
尤其是信息科学中对模糊控制、人工神经网络、自适应控制、最优控制等的研究,悬架系统振动控制技术在现代控制理论指导变得更趋完善,同时已推广应用于车辆悬架系统的振动控制,悬架系统振动控制技术得到了快速发展。
与此同时,伴随着车辆结构和功能的不断改进和完善,研究车辆振动,设计新型悬架系统,将振动控制到最低水平是提高现代车辆品质的一项极为重要的措施。
关键词:主动悬架控制策略模糊控制ABSTRACTSuspension system is an important part of the vehicle., Vehicle suspension performance is one of the important factors,which affects vehicle’s ride comfort, handling stability and speed .Traditional passive suspension generally consists offixed paramete elastic member and damping components, it is designed to accommodate a particular surface, which limits further improvemennt of vehicle performance. in 1970s, industrial countries have begun to study active vibration control which is based on active, semi-active suspension system. In recent years, the rapid development of electronic technology, control technology, mechanical dynamics and other disciplines,makinng the vehicle suspension system develop from the traditional passive control to active vibration control.especially the research of optimal control, adaptive control, fuzzy control, artificial neural networks and other research in information science . Not only the suspension system vibration control technology which is under the guidance of mordern control is more perfect,but also it has been applied to the vehicle suspension system’s vibration control, so The suspension system vibration control technology is made to the rapid development. with the continuous improvement and perfection of the vehicle structure and function, the research of the vehicle vibration, the design of new type suspension systems, and The vibration control to the lowest level is of the most important measures to improve the quality of modern vehicles.Key words; active suspension control strategy fuzzy Control目录摘要........................................................................... 错误!未定义书签。
《基于多算法融合的汽车主动悬架预瞄控制研究》篇一一、引言随着汽车工业的飞速发展,人们对汽车的舒适性、稳定性和安全性要求越来越高。
汽车主动悬架系统作为提升这些性能的关键技术之一,其控制策略的研究显得尤为重要。
本文将探讨基于多算法融合的汽车主动悬架预瞄控制,以提高汽车的行驶性能和乘坐舒适性。
二、汽车主动悬架系统概述汽车主动悬架系统是一种具有自适应能力的悬架系统,能够根据路面状况、车速等信息实时调整悬架的刚度和阻尼,以优化车辆的行驶性能和乘坐舒适性。
该系统主要由传感器、控制器和执行器等部分组成。
三、传统汽车悬架控制算法分析传统的汽车悬架控制算法主要包括天棚阻尼控制、地棚阻尼控制、最优控制等。
这些算法在特定工况下具有一定的效果,但在复杂路况和多变驾驶需求下,其控制效果往往不尽如人意。
因此,需要研究更为先进的控制算法,以提高汽车主动悬架系统的性能。
四、多算法融合的汽车主动悬架预瞄控制策略针对传统算法的局限性,本文提出了一种基于多算法融合的汽车主动悬架预瞄控制策略。
该策略将多种算法进行优化和融合,以实现更精确的预瞄控制和更优的车辆性能。
1. 算法选择与优化首先,选择适合汽车主动悬架系统的算法,如模糊控制、神经网络控制、滑模控制等。
针对不同算法的优点和局限性,进行参数优化和调整,以提高算法的适应性和控制效果。
2. 多算法融合将优化后的算法进行融合,形成多算法融合的控制策略。
通过分析不同算法的输出,综合各种算法的优点,以提高悬架系统的综合性能。
例如,模糊控制可以处理不确定因素,神经网络可以学习并适应复杂路况,滑模控制可以保证系统的稳定性。
3. 预瞄控制在多算法融合的基础上,引入预瞄控制策略。
通过预测未来路面状况和车辆运动状态,提前调整悬架系统的参数,以实现更优的车辆性能和乘坐舒适性。
预瞄控制可以基于传感器数据、车辆动力学模型等信息进行实现。
五、实验与结果分析为了验证基于多算法融合的汽车主动悬架预瞄控制策略的有效性,进行了实验验证。
《基于智能控制的汽车主动悬架控制策略研究》篇一一、引言随着汽车工业的快速发展,汽车主动悬架系统已经成为现代汽车安全与舒适性的重要组成部分。
通过采用先进的控制策略,主动悬架系统可以有效地提高车辆的行驶稳定性、乘坐舒适性以及操控性能。
本文将重点研究基于智能控制的汽车主动悬架控制策略,旨在为汽车悬架系统的优化设计提供理论依据和技术支持。
二、汽车主动悬架系统概述汽车主动悬架系统是一种具有自适应能力的悬架系统,通过传感器实时监测路面状况和车辆运动状态,采用先进的控制算法对悬架进行实时调整,以实现最佳的行驶性能。
与传统的被动悬架系统相比,主动悬架系统具有更高的灵活性和适应性。
三、智能控制在汽车主动悬架系统中的应用智能控制技术在汽车主动悬架系统中发挥着重要作用。
通过采用先进的控制算法和传感器技术,实现对车辆运动状态的实时监测和调整。
常见的智能控制策略包括模糊控制、神经网络控制、遗传算法等。
这些控制策略可以根据不同的道路条件和驾驶需求,对悬架系统进行实时调整,以实现最佳的行驶性能。
四、基于智能控制的汽车主动悬架控制策略研究(一)控制策略设计本文提出一种基于模糊控制的汽车主动悬架控制策略。
该策略通过建立模糊控制器,实现对车辆运动状态的实时监测和调整。
模糊控制器采用输入输出映射的方法,将传感器采集的信号进行模糊化处理,然后根据预设的规则进行决策,最后输出控制信号对悬架系统进行调整。
(二)仿真分析为了验证所提出的控制策略的有效性,本文采用仿真分析的方法。
通过建立车辆动力学模型和主动悬架系统模型,对所提出的控制策略进行仿真测试。
仿真结果表明,该控制策略可以有效地提高车辆的行驶稳定性、乘坐舒适性以及操控性能。
五、实验验证与结果分析为了进一步验证所提出的控制策略的实用性,本文进行了实验验证。
通过在实车上进行实验测试,对比传统被动悬架系统和所提出的主动悬架控制策略在不同道路条件下的性能表现。
实验结果表明,所提出的基于智能控制的汽车主动悬架控制策略在提高车辆行驶稳定性、乘坐舒适性以及操控性能方面具有显著优势。
汽车悬挂系统的主动控制研究汽车悬挂系统是车辆重要的组成部分,它直接影响着车辆的稳定性和行驶舒适性。
传统的汽车悬挂系统是被动的,只能根据路面的情况进行减震和缓冲,无法主动地对路况进行调整。
随着科技的不断发展,主动控制的悬挂系统逐渐成为汽车制造商和消费者关注的焦点。
本文将深入探讨汽车悬挂系统的主动控制研究,包括其原理、优势和应用前景等方面。
一、主动控制悬挂系统的原理主动控制悬挂系统的原理是利用传感器和控制器来感知车辆的运动状态和路面情况,然后通过执行器主动地调整悬挂系统的工作状态,以达到提高车辆行驶稳定性和乘坐舒适性的目的。
它可以根据车辆所处的环境和路况实时地调整悬挂系统的刚度、高度和减震力等参数,从而使车辆在各种路况下都能保持平稳的行驶和乘坐舒适。
主动控制悬挂系统通常包括传感器、控制器和执行器三个部分。
传感器用于感知车辆的运动状态和路面情况,如加速度传感器、车速传感器、悬挂位移传感器等;控制器则根据传感器采集到的数据进行实时计算和分析,并通过执行器来调整悬挂系统的工作状态。
相较于传统的被动悬挂系统,主动控制悬挂系统具有以下几点优势:1. 提高行驶稳定性。
主动控制悬挂系统可以根据车辆的运动状态和路面情况实时地调整悬挂系统的工作状态,从而有效地减轻车辆在转弯、加速和减速时的侧倾和纵向俯仰,提高行驶稳定性。
4. 能够适应不同的驾驶模式。
主动控制悬挂系统可以根据不同的驾驶模式进行调整,如舒适、普通和运动模式,满足不同驾驶者的需求。
5. 增强安全性能。
主动控制悬挂系统可以提供更加灵活的悬挂调整,从而提高车辆在紧急情况下的安全性能。
随着汽车科技的不断发展,主动控制悬挂系统在未来有着广阔的应用前景。
目前,主动控制悬挂系统已经在一些高端车型上开始大规模应用,并且随着成本的不断下降,预计将会逐渐普及到中低端车型中。
在未来,随着自动驾驶技术的发展,主动控制悬挂系统还可以与车辆的自动驾驶系统相结合,实现更加智能化的车辆控制。
主动悬架发展趋势的研究报告
1. 技术创新,主动悬架技术在不断进行技术创新,包括传感器
技术、控制算法、执行机构等方面。
传感器技术的发展使得车辆可
以更准确地感知路况和车辆状态,从而更精准地调节悬架系统。
控
制算法的不断优化也使得主动悬架系统能够更快速地响应路况变化,提高行驶舒适性和稳定性。
2. 能源效率,随着对环保和能源的重视,主动悬架技术也在朝
着提高能源效率的方向发展。
一些新型的主动悬架系统采用了能量
回收技术,通过车辆行驶过程中的震动和振动来回收能量,从而减
少能源消耗。
3. 智能化发展,随着人工智能技术的不断进步,主动悬架系统
也朝着智能化方向发展。
智能主动悬架系统可以通过学习驾驶习惯
和路况,自动调节悬架系统,提高驾驶舒适性和安全性。
4. 集成化设计,未来的主动悬架系统可能会与其他车辆系统进
行更紧密的集成,包括车辆稳定控制系统、自动驾驶系统等。
这将
使得车辆整体性能得到进一步提升。
5. 成本和可靠性,随着主动悬架技术的发展,成本和可靠性也
是需要关注的问题。
未来的主动悬架系统需要在保证性能的同时,
降低成本并提高可靠性,以满足市场需求。
总的来说,主动悬架技术在不断向着智能化、能源效率、集成
化和成本可靠性方面发展。
随着技术的不断进步和汽车行业的发展,主动悬架技术有望在未来发挥更加重要的作用。
汽车主动悬架控制系统的发展研究汽车主动悬架控制系统(Active Suspension System)是指通过电子控制系统实现对汽车悬架系统的主动控制,以提供更好的悬挂性能和乘坐舒适性。
该技术最早在20世纪80年代末期开始研究,到目前已经取得了显著的进展。
在早期的汽车悬挂系统中,弹簧和减振器是主要的悬挂元件,只能提供有限的悬挂调节功能。
而主动悬架系统则通过使用传感器、电机和控制单元等装置,实现对悬架系统的主动控制。
这样可以根据不同的路况和驾驶需求,自动调整悬挂刚度和阻尼,提高行驶稳定性和车辆控制性能。
1.第一代:早期的主动悬架系统通过对悬架刚度和阻尼进行调整来改善悬挂性能。
这些系统使用了传感器来监测车身的倾斜、加速度和行驶状态,并通过电控单元控制悬挂系统。
2.第二代:第二代主动悬架系统引入了主/从结构,即一个悬架控制单元控制多个悬架单元。
这样可以提供更好的悬挂调节性能和更高的可靠性。
3.第三代:第三代主动悬架系统进一步扩展了悬架控制的范围和灵活性。
除了调整刚度和阻尼外,这些系统还可以主动控制悬架高度和行驶高度,进一步提高车辆的稳定性和驾驶舒适性。
4.第四代:第四代主动悬架系统开始应用更高级的控制算法和传感器技术。
这些系统可以通过对车辆动力学和车辆状态的精确建模,实现更精准的悬挂控制。
同时,他们还可以采用更高级的传感器技术,如激光雷达和摄像头,来感知车辆周围环境,提供更全面的悬挂调节功能。
当前,汽车主动悬架控制系统已经广泛应用于高档豪华车和跑车等高性能车型中。
它们可以根据驾驶员的驾驶风格和乘坐舒适性需求,自动调整悬挂刚度和阻尼,并提供更好的悬挂性能和驾驶体验。
除了提供更好的驾驶和乘坐体验外,汽车主动悬架控制系统还具有其他一些优点。
首先,它可以改善汽车的悬挂系统寿命,减少零件的磨损和损坏。
其次,它可以减少车辆的噪音和振动,提高乘坐舒适性。
最后,它还可以提高车辆的行驶稳定性和操控性能,减少事故和碰撞的风险。
汽车悬挂系统的主动控制研究
汽车悬挂系统是提高汽车行驶性能和乘坐舒适度的关键技术之一。
传统的悬挂系统主要是通过被动地改变车身在路面上的位移和姿态来实现对车辆动态特性的调节。
然而,这种被动调节方式受限于路况和车速等因素,无法实现更高级的车辆控制和优化。
为了进一步提升汽车悬挂系统的性能,人们开始研究和开发主动控制技术,以实现更高级的车辆动态控制和响应。
1. 主动悬挂系统:利用电动液压伺服阀或线性电机等装置来主动改变悬挂系统的硬度、阻尼和高度等参数,从而实现对车辆动态特性的主动调节。
这种主动悬挂系统适用于高端豪华车型,可以提供更高级的车辆控制和乘坐舒适度。
2. 主动悬挂系统配合动态稳定控制系统:在传统的动态稳定控制系统的基础上,增
加主动悬挂系统,可以实现对车辆姿态、侧滑和横摆等动态特性的主动调节,从而提高车辆的行驶稳定性和操控性。
这种技术适用于中高端车型,如大众的DCC和奥迪的Magnetic Ride等。
3. 主动悬挂系统配合路况感知系统:利用前置雷达、摄像头和激光雷达等传感器获
取路面的信息,并结合车辆传感器的数据,对悬挂系统的硬度、阻尼和高度等参数进行实时调节,以适应不同的路况和行驶环境。
这种技术适用于高端豪华车型,如玛莎拉蒂的Skyhook和捷豹路虎的Adaptive Dynamics等。
此外,随着电动汽车和自动驾驶技术的快速发展,汽车悬挂系统的主动控制也面临新的挑战和机遇。
未来,主动悬挂系统将更加智能化和个性化,可以通过车载云端系统和人工智能算法等技术,自动学习驾驶者的驾驶习惯和路况偏好,并实现个性化的车辆动态特性调节,从而提升车辆的性能和乘坐舒适度。
井下车辆主动悬架控制技术研究的开题报告一、研究背景和意义井下车辆是矿井的主要输送工具,它们需要在极其恶劣的井下环境条件下运行,并且需要承受大量的重载、长时间运行、频繁的加速和减速等工况。
而井下道路的路面不平坦,路面状况不良也大大影响车辆的性能和寿命。
因此,对于井下车辆主动悬架控制技术的研究具有重要的现实意义。
主动悬架控制技术可以通过对车辆悬架系统的实时控制,改变悬挂系统的刚度、阻尼、高度等参数,以适应不同的路面条件。
这种技术可以在不降低车辆载荷情况下,大大提高车辆行驶的平稳性和舒适性,同时延长车辆寿命,降低维护成本,提高生产效率。
二、研究内容和目标本次研究将聚焦于井下车辆主动悬架控制技术的研究,包括以下内容:1.主动悬架系统模型建立:建立车辆主动悬架系统的数学模型,包括车辆、干扰源和路面等因素,进行仿真模拟和优化设计。
2.主动悬架控制策略设计:设计车辆主动悬架控制策略,结合路面状况、车速、载荷等多个因素进行控制。
3.实验验证和评估:在井下车辆上进行主动悬架控制系统的实验验证和评估,评估其对行驶平稳性、舒适性以及车辆寿命的影响。
三、研究方法1.文献调研法:对井下车辆主动悬架控制技术相关领域的文献进行深入调研和综述分析,获取相关技术背景和前沿进展,为研究提供参考和依据。
2.理论分析法:根据井下车辆运行环境和工况,建立车辆主动悬架系统模型,分析和优化悬挂系统的控制参数和算法。
3.实验验证法:在井下车辆上进行主动悬架控制系统的实验验证,测试主动悬架系统对车辆行驶的平稳性、舒适性和寿命等指标的影响。
四、研究进度计划第一年:1.进行相关领域文献调研和综述分析;2.建立井下车辆主动悬架系统模型,并进行仿真优化;3.初步设计主动悬架控制策略;第二年:1.设计主动悬架控制系统的硬件组成;2.编写悬架控制系统的控制软件;3.进行实验验证和评估,并对实验结果进行分析和总结;第三年:1.根据实验结果优化悬架控制策略;2.进行深入分析和优化悬挂系统参数和算法;3.进行系统整合和优化;五、预期成果和影响本研究将完成井下车辆主动悬架控制技术的研究,建立完整的悬架系统模型,设计有效的主动悬架控制策略,并在实验中进行验证和评估。
车辆主动悬架最优控制及悬架实验台研究湖南大学硕士学位论文车辆主动悬架最优控制及悬架实验台研究姓名:许昭申请学位级别:硕士专业:车辆工程指导教师:郭孔辉;宋晓琳20070420硕士学位论文摘要悬架是现代汽车上的重要总成之一。
它的功用是把路面作用于车轮上的各种力都传递到车架(或承载式车身)上,以保证汽车的正常行驶。
除此之外,还应具有良好的减振和缓冲能力,以缓和由于路面不平传给车架或车身的冲击载荷,保护车身、乘客和货物,抑制车轮的不规则振动。
由于外界干扰引起的车辆振动是影响车辆性能的重要因素。
车辆振动会影响车辆的行驶平顺性和操纵稳定性及车俩零部件的疲劳寿命,因此有效控制车辆振动成为提高车辆整体性能的一项具有实际意义的迫切任务。
为了提高悬架的性能,出现了主动悬架和半主动悬架。
车辆主动悬架设计的关键任务之一,就是要寻求一个能够为车辆提供良好性能的控制律。
许多学者提出了各种不同的控制理论,如:天棚阻尼控制、最优控制、模糊控制及神经网络控制等。
本文对这几种常见的控制算法进行了介绍并重点研究了随机线性最优控制算法。
最优控制的优点在于根据系统的状态变量并通过评价指标的最小化得到一个最优的综台性控制指标,状态变量可以根据需要进行选择,对控制变量的要求可以通过加权值进行协调,这非常适合于多目标的控制,如协调动载、操纵稳定性及舒适性等。
本文通过建立1/4车辆模型,应用最优控制理论进行了车辆主动悬架的LQG(Linear Quadratic Gaussian)控制器的设计,并在Matlab/Simulink环境中建立系统模型并进行仿真。
将仿真结果与被动悬架仿真结果进行对比分析。
仿真结果表明,具有LQG控制器的主动悬架对车辆行驶平顺性和乘坐舒适性的改善有良好的效果;对操纵稳定性的提高在低频区也有较好的效果。
各种主动悬架控制算法层出不穷,但往往理论研究有余、实际验证不足。
悬架实验台具有计算机仿真和道路实验不可比拟的优势,对悬架性能的检测和控制算法的实验研究意义重大。
汽车主动悬架技术的研究现状汽车主动悬架技术是指车辆悬架系统能根据实时道路条件和驾驶需求主动调节悬架硬度、高度、稳定性等参数的技术。
通过主动悬架技术,可以使车辆在不同的路况和驾驶模式下获得更好的悬架性能,提供更舒适、稳定和安全的驾驶体验。
在近年来,随着科技的不断进步和需求的不断增加,汽车主动悬架技术得到了广泛的研究和应用。
本文将重点介绍主动悬架技术的研究现状并对其进行探索。
主动悬架技术的研究主要涉及到悬架系统的硬件结构和控制算法两个方面。
在硬件结构方面,主要研究了可变硬度悬架、可变高度悬架和可变稳定性悬架等。
这些悬架系统通过改变悬架中的弹簧、减振器和支撑点等部分的性能参数来实现悬架的主动调节。
例如,可变硬度悬架可以根据驾驶模式和道路条件实时调整悬架的硬度,提供更好的舒适性和操控性。
可变高度悬架可以根据路况调整车身的高度,提高通过性和稳定性。
可变稳定性悬架则可以根据车辆的动力状态实时调节悬架的稳定性,提高车辆的操控性。
目前,在这些硬件结构方面的研究已经取得了一定的成果,许多汽车企业已经开始在高端车型上应用了这些技术。
在控制算法方面,主要研究了悬架系统的控制策略和调节算法。
悬架系统的控制策略主要包括主动悬架控制和协调悬架控制两种。
主动悬架控制是通过传感器实时采集车辆和道路的信息,然后根据预设的控制算法计算出悬架的调节参数来实现主动调节的目的。
协调悬架控制则是通过车辆的电子控制单元(ECU)实时协调悬架系统和其它部分的工作,以提升整车的性能。
在调节算法方面,主要应用了模糊逻辑控制、神经网络控制和最优控制等方法。
这些算法通过将悬架系统的调节过程建模为一个最优化问题,并根据具体的需求和约束条件求解最优解,从而实现对悬架系统的精确调节。
目前,这些控制算法在实际应用中已经取得了较好的效果,但仍然存在一些问题需要进一步研究和解决。
除了硬件结构和控制算法方面的研究,主动悬架技术还需要解决一些实际应用中的问题。
首先是成本问题,主动悬架技术的研发和生产成本较高,导致其在市场上的价格较高,限制了其推广和应用。
《基于智能控制的汽车主动悬架控制策略研究》篇一一、引言随着汽车工业的快速发展,汽车主动悬架系统已经成为现代汽车安全与舒适性技术的重要标志。
为了实现更好的操控性、舒适性以及行车安全性,对于主动悬架系统的研究成为了车辆动力学领域的一个热门话题。
尤其近年来,智能控制理论的发展与实际应用为汽车主动悬架控制策略提供了新的研究路径。
本文将对基于智能控制的汽车主动悬架控制策略进行深入研究,以提升汽车性能及用户体验。
二、汽车主动悬架系统概述汽车主动悬架系统是一种先进的车辆动力学控制系统,它通过传感器实时监测路面状况和车辆状态,利用执行器主动调整车辆悬挂参数,以实现更好的操控性和舒适性。
与传统被动悬架相比,主动悬架系统具有更高的灵活性,可以实时调整悬挂系统的刚度和阻尼,以适应不同的驾驶环境和路况。
三、智能控制在主动悬架系统中的应用随着人工智能、模糊控制、神经网络等智能控制理论的兴起,越来越多的学者开始将智能控制理论应用于汽车主动悬架系统。
这些智能控制策略可以实时分析车辆状态和路况信息,根据不同情况自动调整悬挂参数,从而提高汽车的操控性、稳定性和舒适性。
(一)人工智能在主动悬架系统中的应用人工智能通过模拟人类智能的方式处理和分析问题,广泛应用于汽车主动悬架系统的控制中。
基于人工智能的悬架控制策略可以实时分析路况、驾驶意图等信息,自动调整悬挂参数,以实现最佳的操控性和舒适性。
此外,人工智能还可以通过学习驾驶者的驾驶习惯和偏好,自动调整悬挂系统的设置,以满足不同驾驶者的需求。
(二)模糊控制在主动悬架系统中的应用模糊控制是一种基于模糊逻辑的控制方法,适用于处理具有模糊性和不确定性的问题。
在汽车主动悬架系统中,模糊控制可以根据路况和车辆状态信息,自动调整悬挂参数,以实现最佳的操控性和稳定性。
模糊控制具有较好的鲁棒性和适应性,可以有效地应对不同的驾驶环境和路况变化。
(三)神经网络在主动悬架系统中的应用神经网络是一种模拟人脑神经元结构的计算模型,具有强大的学习和自适应能力。
汽车悬挂系统的主动控制研究随着汽车工业的不断发展,汽车悬挂系统的研究和改进也成为了汽车工程领域的热门话题之一。
汽车悬挂系统对于汽车行驶性能、舒适性以及安全性都起着至关重要的作用,因此如何通过主动控制技术来提高汽车悬挂系统的性能已经成为一个备受关注的话题。
本文将重点探讨汽车悬挂系统的主动控制研究,并对该领域的发展现状和未来趋势进行分析。
1. 汽车悬挂系统的作用和结构汽车悬挂系统是汽车的重要组成部分之一,它对汽车的行驶性能、舒适性以及安全性都有着直接影响。
汽车悬挂系统的主要作用包括:1)吸收和减震道路不平时所产生的冲击力,保证车辆的稳定性和舒适性;2)保持车身与车轮之间的合适位置关系,确保车辆在颠簸道路上有良好的抓地力和操控性。
汽车悬挂系统通常由减震器、弹簧、控制臂、横向稳定杆等组成。
其中减震器主要用于减少车身的颠簸和摇晃,弹簧则用于支撑车身重量并保持车身姿态,而控制臂和横向稳定杆则用于控制车轮和车身的运动,从而提高车辆的操控性能和稳定性。
2. 汽车悬挂系统的主动控制技术主动悬挂系统是指利用先进的传感器、执行器和控制系统来感知、分析和响应道路和车辆状态变化,从而及时调节悬挂系统的工作状态和性能。
通过主动悬挂系统,可以实现对车辆悬挂系统的实时控制,以提高车辆的行驶性能、舒适性和安全性。
主动悬挂系统的主要技术包括主动减震控制、主动悬架高度控制、主动抗侧倾控制等。
其中主动减震控制是目前应用最为广泛的一种主动悬挂技术,它通过感知车辆的速度、加速度、横向加速度、车身姿态等参数,并根据这些参数实时调节减震器的阻尼力,从而实现对车辆行驶过程中的颠簸和摇晃的抑制,提高车辆的舒适性和操控性。
目前,各大汽车厂商和研究机构都在积极开展汽车悬挂系统的主动控制研究。
主动减震控制技术已经在一些高端汽车上得到了应用,如奔驰的ABC主动悬挂系统、宝马的EDC主动减震系统等。
这些系统都采用了先进的传感器、控制器以及可调节减震器来实现对车辆悬挂系统的主动控制,从而提高了车辆的操控性能和舒适性。