ADAMS常用函数
- 格式:doc
- 大小:37.00 KB
- 文档页数:3

在使用adams的过程中,由于函数比较多,大概有11种之多,如1、Displacement Function 2、Velocity Functions 3、Acceleration Functions 4、Contact Functions 5、Spline Functions 6、Force in Object Functions 7、Resultant Force Functions 8、Math Functions 9、Data Element Access 10、User-Written Subroutine Invocation 11、Constants & Variables。
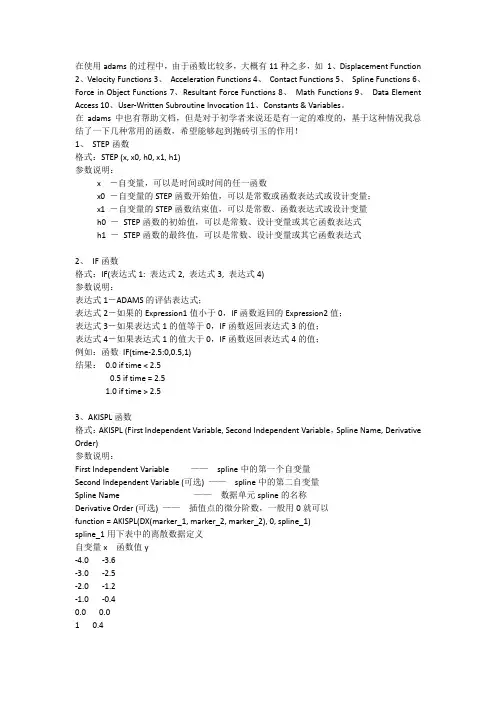
在adams中也有帮助文档,但是对于初学者来说还是有一定的难度的,基于这种情况我总结了一下几种常用的函数,希望能够起到抛砖引玉的作用!1、STEP函数格式:STEP (x, x0, h0, x1, h1)参数说明:x―自变量,可以是时间或时间的任一函数x0 ―自变量的STEP函数开始值,可以是常数或函数表达式或设计变量;x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量h0 ―STEP函数的初始值,可以是常数、设计变量或其它函数表达式h1 ―STEP函数的最终值,可以是常数、设计变量或其它函数表达式2、IF函数格式:IF(表达式1: 表达式2, 表达式3, 表达式4)参数说明:表达式1-ADAMS的评估表达式;表达式2-如果的Expression1值小于0,IF函数返回的Expression2值;表达式3-如果表达式1的值等于0,IF函数返回表达式3的值;表达式4-如果表达式1的值大于0,IF函数返回表达式4的值;例如:函数IF(time-2.5:0,0.5,1)结果:0.0 if time < 2.50.5 if time = 2.51.0 if time >2.53、AKISPL函数格式:AKISPL (First Independent Variable, Second Independent Variable,Spline Name, Derivative Order)参数说明:First Independent Variable——spline中的第一个自变量Second Independent Variable (可选) ——spline中的第二自变量Spline Name——数据单元spline的名称Derivative Order (可选) ——插值点的微分阶数,一般用0就可以function = AKISPL(DX(marker_1, marker_2, marker_2), 0, spline_1)spline_1用下表中的离散数据定义自变量x 函数值y-4.0 -3.6-3.0 -2.5-2.0 -1.2-1.0 -0.40.0 0.01 0.42 1.23 2.54 3.64、碰撞函数impact其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
ADAMS常用函数总结在使用adams的过程中,由于函数比较多,大概有11种之多,如1、Displacement Fu nction 2、Velocity Functions 3、Acceleration Functions 4、Contact Functions 5、Spline Functions 6、Force in Object Functions 7、Resultant Force Functi ons 8、Math Functions 9、Data Element Access 10、User-Written SubroutineInvocation 11、Constants & Variables。
在adams中也有帮助文档,但是对于初学者来说还是有一定的难度的,基于这种情况我总结了一下几种常用的函数,希望能够起到抛砖引玉的作用!1、STEP函数格式:STEP (x, x0, h0, x1, h1)参数说明:x―自变量,可以是时间或时间的任一函数x0 ―自变量的STEP函数开始值,可以是常数或函数表达式或设计变量;x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量h0 ―STEP函数的初始值,可以是常数、设计变量或其它函数表达式h1 ―STEP函数的最终值,可以是常数、设计变量或其它函数表达式2、IF函数格式:IF(表达式1: 表达式2, 表达式3, 表达式4)参数说明:表达式1-ADAMS的评估表达式;表达式2-如果的Expression1值小于0,IF函数返回的Expression2值;表达式3-如果表达式1的值等于0,IF函数返回表达式3的值;表达式4-如果表达式1的值大于0,IF函数返回表达式4的值;例如:函数IF(time-2.5:0,0.5,1)结果:0.0 if time < 2.50.5 if time = 2.51.0 if time >2.53、AKISPL函数格式:AKISPL (First Independent Variable, Second Independent Variable,SplineName, Derivative Order)参数说明:First Independent Variable——spline中的第一个自变量Second Independent Variable (可选) ——spline中的第二自变量Spline Name——数据单元spline的名称Derivative Order (可选) ——插值点的微分阶数,一般用0就可以function = AKISPL(DX(marker_1, marker_2, marker_2), 0, spline_1)spline_1用下表中的离散数据定义自变量x 函数值y-4.0 -3.6-3.0 -2.5-2.0 -1.2-1.0 -0.40.0 0.01 0.42 1.23 2.54 3.64、碰撞函数impact其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
ADAMS/View函数及ADAMS/Solver函数的类型及建立ADAMS/View函数包括设计函数Design-Time Functions与运行函数Run-Time Functions两种类型,函数的建立对应有表达式模式和运行模式两种。
表达式模式下在设计过程中对设计函数求值,而运行模式下会在仿真过程中对运行函数进行计算更新。
ADAMS/Solver函数支持ADAMS/View运行模式下的函数,在仿真过程中采用ADAMS/Solver 解算时对这些函数进行计算更新。
建立表达式模式下的函数在进行建立表达式、产生和修改需要计算的测量及建立设计函数等操作时,会采用表达式模式。
在建立表达式时,首先在接受表达式的文本框处右击,然后选择“Parameterize”再选择“Expression Euilder”,进入建立设计函数表达式对话框。
在该对话框中输入表达式,然后单击“OK”完成操作。
在产生和修改需要计算的测量时,首先在“Build”菜单中选择“Measure”,然后指向“Computed”,再选择“New”或“Modified”确定是新建还是修改,进入产生和修改需要计算的测量对话框。
在该对话框中输入表达式,然后单击“OK”完成操作。
在建立设计函数时,首先在“Build”菜单中选择“Function”,然后选择“New”或“Modified”确定是新建还是修改,进入产生和修改设计函数对话框。
在该对话框中输入表达式,然后单击“OK”完成操作。
建立运行模式下的函数在进行建立运行函数、产生和修改函数型的测量等操作时,会采用运行模式。
在建立运行函数时,首先在接受表达式的文本框处右击,然后选择“Function Euilder”,进入建立运行函数表达式对话框。
在该对话框中输入表达式,然后单击“OK”完成操作。
在产生和修改函数型的测量时,首先在“Build”菜单中选择“Measure”,然后指向“Function”,再选择“New”或“Modified”确定是新建还是修改,进入产生和修改函数型的度量对话框。
Adams常用函数step可能是最常用的:step(time,0,0,1,50)+step(time,4,0,6,-100)+step(tme,9,0,10,50)函数原形STEP(A,x1,h1,x2,h2)解释:由数组A的x值,生成区间(x1,h1)至(x2,h2)之间的阶梯曲线,返回y值的数据。
举个常用的例子。
比如STEP(time,1,0,2,100)time在adams中是个递增的变量,相当于一个数组。
那么step的返回值就是随着time变化的值。
这个例子将表示在time从(1,2)的过程中,返回值将从0,100。
看看例子,两个小球,一个使用step 函数设置了位移,另外一个是参考。
当然,这个变化过程,adams使用了缓和的图形,从其位移图中可以看出来。
step既然是个返回值,就可以使用加减法了。
如上例,如果设置下面的小球的位移如下:STEP(time,1,0,2,100)+step(time,2,0,3,400)+step(time,3,0,4,-200)1.以前用过碰撞函数,有单向和双向函数的区分,其中系统的球面等碰撞为其特例!IMPACT (Displacement Variable, Veloci t y Variable, Trigger forDisplacement Variable, Stiffness Coefficient, Stiffness Force Exponent,Damping Coefficient, Damping Ramp-up Distance)BISTOP (Displacement Variable, Velocity Variable, Low Trigger forDisplacement Variable, High Trigger for Displacement Variable, StiffnessCoefficient, Stiffness Force Exponent, Damping Coefficient, DampingRamp-up Distance)2.if函数这个函数最好不要使用,他的使用会带来突变,会使运算的时候不收敛。
Adams函数解析I.STEP函数(阶跃函数)STEP函数格式:STEP (x, x0, h0, x1, h1) 参数说明: x―自变量,可以是时间或时间的任一函数 x0 ―自变量的STEP函数开始值,可以是常数、函数表达式或设计变量; x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量 h0 ― STEP函数的初始值,可以是常数、设计变量或其它函数表达式 h1 ― STEP函数的最终值,可以是常数、设计变量或其它函数表达式注意:(1)除非输入新的STEP,否则,上一个STEP的渐变结果将在接下来的时间里,一直保持。
(2)每个STEP只能从0开始渐变,所以,每一次的STEP都是相对于上一次操作结果的累加计算。
1.旋转副驱动(角位移):STEP(time,1,0d,2,20d)+STEP(time,6,0d,12,-40)意义:1秒到2秒:从0递增至20;2秒到6秒:保持电机输出数值为20不变;6秒到12秒:由20递减40,结果为-20。
2.旋转副驱动(角速度):step(time,0,0,1,30)+step(time,3,0,6,-30)先在1秒内加速至30d/s,再匀速保持2秒,最后在3秒内减速制0d/s。
3.旋转副驱动参数化(角速度):step(time,0,0,0.1,-2*(-56*time**2+521*time+48)/(DV_AB*cos(DV_BAD))) +step(time,1.36,0,1.56,2*(-56*time**2+521*time+48)/(DV_AB*cos(DV_BA D)))+ step(time,1.56,0,1.86,5.54) + step(time,1.86,0,2.16,-5.54)。
前0.1秒使驱动速度缓慢上升到拔起速度的较优速度-2*(-56*time**2+521*time+48)/( DV_AB*cos(DV_BAD)),然后按较优速度匀速运动至1.36秒,接着用0.2秒减速至0,当减速至零的那一刻又缓慢的加速0.3秒,然后又缓慢的减速0.3秒,回到原来位置。
1.step可能是最常用的:step(time,0,0,1,50)+step(time,4,0,6,-100)+step(tme,9,0,10,50)函数原形 STEP(A,x1,h1,x2,h2)解释:由数组A的x值,生成区间(x1,h1)至(x2,h2)之间的阶梯曲线,返回y值的数据。
举个常用的例子。
比如STEP(time,1,0,2,100)time在adams中是个递增的变量,相当于一个数组。
那么step的返回值就是随着time变化的值。
这个例子将表示在time从(1,2)的过程中,返回值将从0,100。
看看例子,两个小球,一个使用step函数设置了位移,另外一个是参考。
当然,这个变化过程,adams使用了缓和的图形,从其位移图中可以看出来。
step既然是个返回值,就可以使用加减法了。
如上例,如果设置下面的小球的位移如下:STEP(time,1,0,2,100)+step(time,2,0,3,400)+step(time,3,0,4,-200)2.以前用过碰撞函数,有单向和双向函数的区分,其中系统的球面等碰撞为其特例!IMPACT (Displacement Variable, Velocity Variable, Trigger forDisplacement Variable, Stiffness Coefficient, Stiffness Force Exponent,Damping Coefficient, Damping Ramp-up Distance)BISTOP (Displacement Variable, Velocity Variable, Low Trigger for Displacement Variable, High Trigger for Displacement Variable, StiffnessCoefficient, Stiffness Force Exponent, Damping Coefficient, Damping Ramp-up Distance)3.if函数这个函数最好不要使用,他的使用会带来突变,会使运算的时候不收敛。
adams 函数ADAMS/View 运行函数及ADAMS/Solver 函数2008-04-18 04:543 ADAMS/View 运行函数及ADAMS/Solver 函数ADAMS/View 运行函数能够表明定义系统行为的仿真状态间的数学关系。
在ADAMS/ View 中将这些运行函数与其他不同元素一同创建各种系统变量,这些函数大多数都以施加力和产生运动为目的。
之后在仿真中进行解算时,ADAMS/ Solver 会用到这些变量函数并进行计算更新,在仿真过程中这些系统状态会发生改变,如随时间的改变而改变、随零件的移动而改变、施加的力以不同方式改变等。
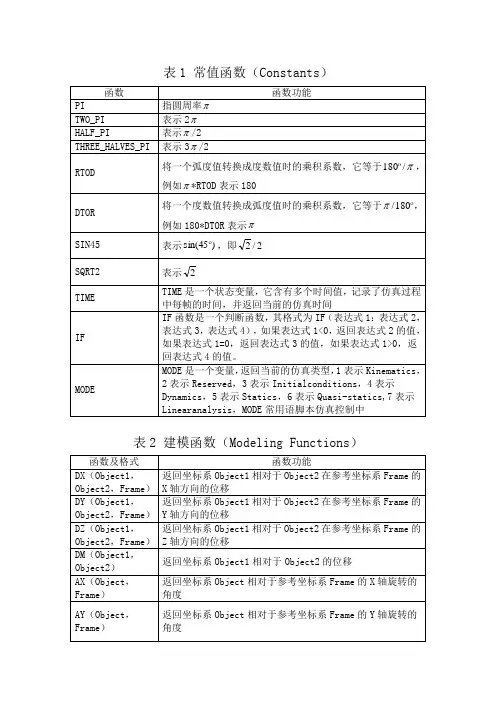
3.1 位移函数(1)线位移函数DX 返回位移矢量在坐标系X 轴方向的分量DY 返回位移矢量在坐标系Y 轴方向的分量DZ 返回位移矢量在坐标系Z 轴方向的分量DM 返回位移距离(2)角位移函数AX 返回一指定标架绕另一标架X 轴旋转的角度AY 返回一指定标架绕另一标架Y 轴旋转的角度AZ 返回一指定标架绕另一标架Z 轴旋转的角度(3)按313 顺序的角位移PSI 按照313 旋转顺序,返回指定坐标系相对于参考坐标系的第一旋转角度THETA 按照313 旋转顺序,返回指定坐标系相对于参考坐标系的第二旋转角度PHI 按照313 旋转系列,返回指定坐标系相对于参考坐标系的第三旋转角度(4)按照321 顺序的角位移YAW 按照321 旋转顺序,返回指定坐标系相对于参考坐标系的第一旋转角度PITCH 按照321 旋转顺序,返回指定坐标系相对于参考坐标系的第二旋转角度的相反数ROLL 按照321 旋转顺序,返回指定坐标系相对于参考坐标系的第三旋转角度3.2 速度函数(1)线速度函数VX 返回两标架相对于指定坐标系的速度矢量差在X 轴的分量VY 返回两标架相对于指定坐标系的速度矢量差在Y 轴的分量VZ 返回两标架相对于指定坐标系的速度矢量差在Z 轴的分量VM 返回两标架相对于指定坐标系的速度矢量差的幅值VR 返回两标架的径向相对速度(2)角速度函数WX 返回两标架的角速度矢量差在X 轴的分量WX 返回两标架的角速度矢量差在Z 轴的分量WM 返回两标架的角速度矢量差的幅值3.3 加速度函数(1)线加速度函数ACCX 返回两标架相对于指定坐标系的加速度矢量差在X 轴的分量ACCY 返回两标架相对于指定坐标系的加速度矢量差在Y 轴的分量ACCZ 返回两标架相对于指定坐标系的加速度矢量差在Z 轴的分量ACCM 返回两标架相对于指定坐标系的加速度矢量差的幅值(2)角加速度函数WDTX 返回两标架的角加速度矢量差在轴的分量WDTY 返回两标架的角加速度矢量差在Y 轴的分量WDTZ 返回两标架的角加速度矢量差在Z 轴的分量WDTM 返回两标架的角加速度矢量差的幅值3.4 接触函数IMPACT 生成单侧碰撞力BISTOP 生成双侧碰撞力3.5 样条差值函数CUBSPL 标准三次样条函数插值CURVE B 样条拟合或用户定义拟合AKISPL 根据Akima 拟合方式得到的插值3.6 约束力函数JOINT 返回运动副上的连接力或力矩MOTION 返回由于运动约束而产生的力或力矩PTCV 返回点线接触运动副上的力或力矩CVCV 返回线线接触运动副上的力或力矩JPRIM 返回基本约束引起的力或力矩SFORCE 返回单个作用力施加在一个或一对构件上引起的力或力矩VFORCE 返回3 个方向组合力施加在一个或一对构件上引起的力或力矩VTORQ 返回3 个方向组合力矩施加在一个或一对构件上而引起的力或力矩GFORCE 返回6 个方向组合力(力矩)施加在一个或一对构件上而引起的力或力矩NFORCE 返回一个由多点作用力施加在一个或一对构件上而引起的力或力矩BEAM 返回由梁连接施加在一个或一对构件上的力或力矩BUSH 返回由衬套连接施加在一个或一对构件上而引起的力或力矩FIELD 返回一个由场力施加在一个或一对构件上而引起的力或力矩SPDP 返回一个由弹簧阻尼力施加在一个或一对构件上而引起的力或力矩3.7 合力函数FX 返回两标架间作用的合力在X 轴上的分量FY 返回两标架间作用的合力在Y 轴上的分量FM 返回两标架间作用的合力TX 返回两标架间作用的合力矩在X 轴上的分量TY 返回两标架间作用的合力矩在Y 轴上的分量TZ 返回两标架间作用的合力矩在Z 轴上的分量TM 返回两标架间作用的合力矩3.8 数学函数CHEBY 计算切比雪夫多项式FORCOS 计算傅立叶余弦级数FORSIN 计算傅立叶正弦级数HAVSIN 定义半正矢阶跃函数INVPSD 依据功率谱密度生成时域信号MAX 计算最大值MIN 计算最小值POLY 计算标准多项式SHF 计算简谐函数STEP 3 次多项式逼近阶跃函数STEP5 5 次多项式逼近阶跃函数SWEEP 返回按指定格式生成的变频正弦函数还有其他一些常用数学计算的数学函数与ADAMS/View 设计函数中的数学函数相同。
ADAMS/View中系统提供的数学函数大致分类介绍如下。
(1)基本数学函数ABS(x)数字表达式x的绝对值DIM(x1,x2)x1>x2时x1与x2之间的差值,x1<x2时返回0EXP(x)数字表达式x的指数值LOG(x)数字表达式x的自然对数值LOG10(x)数字表达式x的以10为底的对数值MAG(x,y,z)向量[x,y,z]求模MOD(x1,x2)数字表达式x1对另一个数字表达式x2取余数RAND(x)返回0到1之间的随机数SIGN(x1,x2)符号函数,当x2>0时返回ABS(x),当x2<0时返回-ABS(x) SQRT(x)数字表达式x的平方根值(2)三角函数SIN(x)数字表达式x的正弦值SINH(x)数字表达式x的双曲正弦值COS(x)数字表达式x的余弦值COSH(x)数字表达式x的双曲余弦值TAN(x)数字表达式x的正切值TANH(x)数字表达式x的双曲正切值ASIN(x)数字表达式x的反正弦值ACOS(x)数字表达式x的反余弦值ATAN(x)数字表达式x的反正切值ATAN2(x1,x2)两个数字表达式x1,x2的四象限反正切值(3)取整函数INT(x)数字表达式x取整AINT(x)数字表达式x向绝对值小的方向取整ANINT(x)数字表达式x向绝对值大的方向取整CEIL(x)数字表达式x向正无穷的方向取整FLOOR(x)数字表达式x向负无穷的方向取整NINT(x)最接近数字表达式x的整数值RTOI(x)返回数字表达式x的整数部分位置/方向函数位置/方向函数用于根据不同输入变量计算有关位置或方向的参数。
ADAMS/View中系统提供的位置/方向函数分类介绍如下。
(1)位置函数LOC_ALONG_LINE返回两点连线上与第一点距离为指定值的点LOC_CYLINDRICAL将圆柱坐标系下坐标值转化为笛卡儿坐标系下坐标值LOC_FRAME_MIRROR返回指定点关于指定坐标系下平面的对称点LOC_GLOBAL返回参考坐标系下的点在全局坐标系下的坐标值OC_INLINE将一个参考坐标系下的坐标值转化为另一参考坐标系下的坐标值并归一化LOC_LOC将一个参考坐标系下的坐标值转化为另一参考坐标系下的坐标值LOC_LOCAL返回全局坐标系下的点在参考坐标系下的坐标值LOC_MIRROR返回指定点关于指定坐标系下平面的对称点LOC_ON_AXIS沿轴线方向平移LOC_ON_LINE返回两点连线上与第一点距离为指定值的点LOC_PERPENDICULAR返回平面法线上距离指定点单位长度的点LOC_PLANE_MIRROR返回特定点关于指定平面的对称点LOC_RELATIVE_TO返回特定点在指定坐标系下的坐标值LOC_SPHERICAL将球面坐标转化为笛卡儿坐标LOC_X_AXIS坐标系x轴在全局坐标中的单位矢量LOC_Y_AXIS坐标系y轴在全局坐标中的单位矢量LOC_Z_AXIS坐标系z轴在全局坐标中的单位矢量(2)方向函数ORI_ALIGN_AXIS将坐标系按指定方式旋转至与指定方向对齐所需旋转的角度ORI_ALONG_AXIS_EUL将坐标系按指定方式旋转至与全局坐标系一个轴方向对齐所需旋转的角度ORI_ALL_AXES将坐标系旋转至由平面上的点定义的特定方向(第一轴与指定平面上两点连线平行,第二轴与指定平面平行)时所需旋转的角度ORI_ALONG_AXIS将坐标系旋转至其一轴线沿指定轴线方向时所需旋转的角度ORI_FRAME_MIRROR返回坐标系旋转镜像到指定坐标系下所需旋转的角度ORI_GLOBAL返回参考坐标系在全局坐标系下的角度值ORI_IN_PLANE将坐标系旋转至特定方向(与指定两点连线平行、与指定平面平行时所需旋转的角度ORI_LOCAL返回全局坐标系在参考坐标系下的角度值ORI_MIRROR返回坐标系旋转镜像到指定坐标系下所需旋转的角度ORI_ONE_AXIS将坐标系旋转至其一轴线沿两点连线方向时所需旋转的角度ORI_ORI将一个参考坐标系转化为另一参考坐标系所需旋转的角度ORI_PLANE_MIRROR返回坐标系旋转生成关于某平面的镜像所需旋转的角度ORI_RELATIVE_TO返回全局坐标系下角度值相对指定坐标系的旋转角度建模函数运动学建模函数返回marker点或构件之间位移的度量。
ADAMS常用函数总结在使用adams的过程中,由于函数比较多,大概有11种之多,如1、Displacement Function 2、Velocity Functions 3、Acceleration Functions 4、Contact Functions 5、Spline Functions 6、Force in Object Functions 7、Resultant Force Functions 8、Math Functions 9、Data Element Access 10、User-Written Subroutine Invocation 11、Constants & Variables。
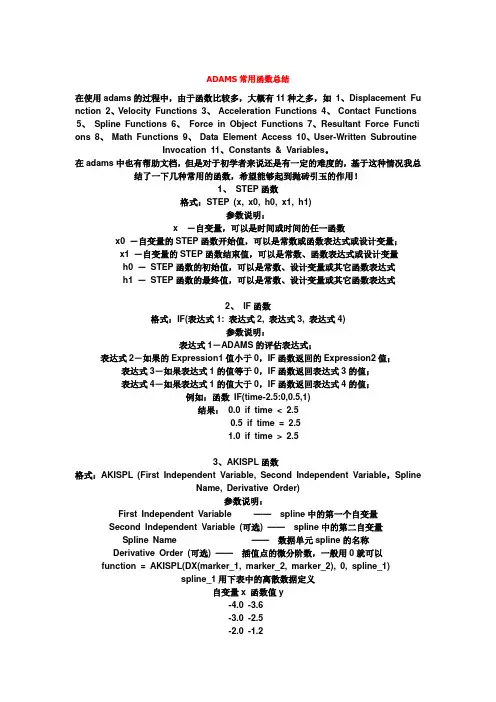
在adams中也有帮助文档,但是对于初学者来说还是有一定的难度的,基于这种情况我总结了一下几种常用的函数,希望能够起到抛砖引玉的作用!1、 STEP函数格式:STEP (x, x0, h0, x1, h1)参数说明: x ―自变量,可以是时间或时间的任一函数 x0 ―自变量的STEP函数开始值,可以是常数或函数表达式或设计变量; x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量 h0 ― STEP函数的初始值,可以是常数、设计变量或其它函数表达式 h1 ― STEP函数的最终值,可以是常数、设计变量或其它函数表达式2、 IF函数格式:IF(表达式1: 表达式2, 表达式3, 表达式4)参数说明:表达式1-ADAMS的评估表达式;表达式2-如果的Expression1值小于0,IF函数返回的Expression2值;表达式3-如果表达式1的值等于0,IF函数返回表达式3的值;表达式4-如果表达式1的值大于0,IF函数返回表达式4的值;例如:函数 IF(time-2.5:0,0.5,1)结果: 0.0 if time < 2.5 0.5 if time = 2.51.0 if time >2.53、AKISPL函数格式:AKISPL (First Independent Variable, Second IndependentVariable,Spline Name, Derivative Order)参数说明:First Independent Variable —— spline中的第一个自变量Second Independent Variable (可选) —— spline中的第二自变量Spline Name —— 数据单元spline的名称Derivative Order (可选) —— 插值点的微分阶数,一般用0就可以function = AKISPL(DX(marker_1, marker_2, marker_2), 0, spline_1) spline_1用下表中的离散数据定义自变量x 函数值y-4.0 -3.6-3.0 -2.5-2.0 -1.2-1.0 -0.40.0 0.01 0.42 1.23 2.54 3.64、碰撞函数impact其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
常数函数常用的常数函数(constant):PI圆周率;RTOD弧度转化为度数时的乘积系数,值为180/PI;DTOR度数转化为弧度时的乘积系数,值为PI/ 180。
运动副的驱动函数function:30.0d*time,type:displacement和function:30.0d,type:velocity 作用是一样的,它们都表示角速度为30.0。
同样,function:30.0d*time,type:velocity和function:30.0d,type:acceleration作用也是一样的,它们都表示角加速度为30.0。
一般应优先使用function:30.0d,type:velocity这种表示法,它更简单,更便于理解。
function:5,type:acceleration,表示物体的加速度为常数5;function:STEP( time , 0 , 0 , 5 , 25 ),type:velocity,表示物体的速度从(0,0)变化为(5,25),物体的加速度并不是一个常数,加速度的图形是一条先增后减的弧线。
在定义驱动函数时,如果已知物体的加速度为5,则应采用第一个表达式;如果不知道加速度的变化规律,只知道速度由0,0)变化为(5,25),则应采用第二个表达式。
d是degree度数的简写,在此d并不是单位,而是用来区分滑移运动和旋转运动,代表旋转。
旋转副的驱动函数中函数值后必须加d,如STEP( time , 0 , 0d , 3 , 300d ),而滑移副的驱动函数中函数值后不能加d。
则直接数字,默认单位。
常用的驱动函数STEP格式:STEP (x, x0, h0, x1, h1)参数说明:x ―自变量,可以是时间或时间的任一函数;x0 ―自变量的STEP函数开始值;x1 ―自变量的STEP函数结束值;h0 ―当前时间点相对于上一时间点的函数值增量;h1 ―当前时间点相对于上一时间点的函数值增量。
(完整版)adams函数adams 函数ADAMS/View 运行函数及ADAMS/Solver 函数2008-04-18 04:543 ADAMS/View 运行函数及ADAMS/Solver 函数ADAMS/View 运行函数能够表明定义系统行为的仿真状态间的数学关系。
在ADAMS/ View 中将这些运行函数与其他不同元素一同创建各种系统变量,这些函数大多数都以施加力和产生运动为目的。
之后在仿真中进行解算时,ADAMS/ Solver 会用到这些变量函数并进行计算更新,在仿真过程中这些系统状态会发生改变,如随时间的改变而改变、随零件的移动而改变、施加的力以不同方式改变等。
3.1 位移函数(1)线位移函数DX 返回位移矢量在坐标系X 轴方向的分量DY 返回位移矢量在坐标系Y 轴方向的分量DZ 返回位移矢量在坐标系Z 轴方向的分量DM 返回位移距离(2)角位移函数AX 返回一指定标架绕另一标架X 轴旋转的角度AY 返回一指定标架绕另一标架Y 轴旋转的角度AZ 返回一指定标架绕另一标架Z 轴旋转的角度(3)按313 顺序的角位移PSI 按照313 旋转顺序,返回指定坐标系相对于参考坐标系的第一旋转角度THETA 按照313 旋转顺序,返回指定坐标系相对于参考坐标系的第二旋转角度PHI 按照313 旋转系列,返回指定坐标系相对于参考坐标系的第三旋转角度(4)按照321 顺序的角位移YAW 按照321 旋转顺序,返回指定坐标系相对于参考坐标系的第一旋转角度PITCH 按照321 旋转顺序,返回指定坐标系相对于参考坐标系的第二旋转角度的相反数ROLL 按照321 旋转顺序,返回指定坐标系相对于参考坐标系的第三旋转角度3.2 速度函数(1)线速度函数VX 返回两标架相对于指定坐标系的速度矢量差在X 轴的分量VY 返回两标架相对于指定坐标系的速度矢量差在Y 轴的分量VZ 返回两标架相对于指定坐标系的速度矢量差在Z 轴的分量VM 返回两标架相对于指定坐标系的速度矢量差的幅值VR 返回两标架的径向相对速度(2)角速度函数WX 返回两标架的角速度矢量差在X 轴的分量WX 返回两标架的角速度矢量差在Z 轴的分量WM 返回两标架的角速度矢量差的幅值3.3 加速度函数(1)线加速度函数ACCX 返回两标架相对于指定坐标系的加速度矢量差在X 轴的分量ACCY 返回两标架相对于指定坐标系的加速度矢量差在Y 轴的分量ACCZ 返回两标架相对于指定坐标系的加速度矢量差在Z 轴的分量ACCM 返回两标架相对于指定坐标系的加速度矢量差的幅值(2)角加速度函数WDTX 返回两标架的角加速度矢量差在轴的分量WDTY 返回两标架的角加速度矢量差在Y 轴的分量WDTZ 返回两标架的角加速度矢量差在Z 轴的分量WDTM 返回两标架的角加速度矢量差的幅值3.4 接触函数IMPACT 生成单侧碰撞力BISTOP 生成双侧碰撞力3.5 样条差值函数CUBSPL 标准三次样条函数插值CURVE B 样条拟合或用户定义拟合AKISPL 根据Akima 拟合方式得到的插值3.6 约束力函数JOINT 返回运动副上的连接力或力矩MOTION 返回由于运动约束而产生的力或力矩PTCV 返回点线接触运动副上的力或力矩CVCV 返回线线接触运动副上的力或力矩JPRIM 返回基本约束引起的力或力矩SFORCE 返回单个作用力施加在一个或一对构件上引起的力或力矩VFORCE 返回3 个方向组合力施加在一个或一对构件上引起的力或力矩VTORQ 返回3 个方向组合力矩施加在一个或一对构件上而引起的力或力矩GFORCE 返回6 个方向组合力(力矩)施加在一个或一对构件上而引起的力或力矩NFORCE 返回一个由多点作用力施加在一个或一对构件上而引起的力或力矩BEAM 返回由梁连接施加在一个或一对构件上的力或力矩BUSH 返回由衬套连接施加在一个或一对构件上而引起的力或力矩FIELD 返回一个由场力施加在一个或一对构件上而引起的力或力矩SPDP 返回一个由弹簧阻尼力施加在一个或一对构件上而引起的力或力矩3.7 合力函数FX 返回两标架间作用的合力在X 轴上的分量FY 返回两标架间作用的合力在Y 轴上的分量FM 返回两标架间作用的合力TX 返回两标架间作用的合力矩在X 轴上的分量TY 返回两标架间作用的合力矩在Y 轴上的分量TZ 返回两标架间作用的合力矩在Z 轴上的分量TM 返回两标架间作用的合力矩3.8 数学函数CHEBY 计算切比雪夫多项式FORCOS 计算傅立叶余弦级数FORSIN 计算傅立叶正弦级数HAVSIN 定义半正矢阶跃函数INVPSD 依据功率谱密度生成时域信号MAX 计算最大值MIN 计算最小值POLY 计算标准多项式SHF 计算简谐函数STEP 3 次多项式逼近阶跃函数STEP5 5 次多项式逼近阶跃函数SWEEP 返回按指定格式生成的变频正弦函数还有其他一些常用数学计算的数学函数与ADAMS/View 设计函数中的数学函数相同。
在使用adams的过程中,由于函数比较多,大概有11种之多,如1、Displacement Function 2、Velocity Functions 3、Acceleration Functions 4、Contact Functions 5、Spline Functions 6、Force in Object Functions 7、Resultant Force Functions 8、Math Functions 9、Data Element Access 10、User-Written Subroutine Invocation 11、Constants & Variables。
在adams中也有帮助文档,但是对于初学者来说还是有一定的难度的,基于这种情况我总结了一下几种常用的函数,希望能够起到抛砖引玉的作用!
1、STEP函数
格式:STEP (x, x0, h0, x1, h1)
参数说明:
x―自变量,可以是时间或时间的任一函数
x0 ―自变量的STEP函数开始值,可以是常数或函数表达式或设计变量;
x1 ―自变量的STEP函数结束值,可以是常数、函数表达式或设计变量
h0 ―STEP函数的初始值,可以是常数、设计变量或其它函数表达式
h1 ―STEP函数的最终值,可以是常数、设计变量或其它函数表达式
2、IF函数
格式:IF(表达式1: 表达式2, 表达式3, 表达式4)
参数说明:
表达式1-ADAMS的评估表达式;
表达式2-如果的Expression1值小于0,IF函数返回的Expression2值;
表达式3-如果表达式1的值等于0,IF函数返回表达式3的值;
表达式4-如果表达式1的值大于0,IF函数返回表达式4的值;
例如:函数IF(time-2.5:0,0.5,1)
结果:0.0 if time < 2.5
0.5 if time = 2.5
1.0 if time >
2.5
3、AKISPL函数
格式:AKISPL (First Independent Variable, Second Independent Variable,Spline Name, Derivative Order)
参数说明:
First Independent Variable——spline中的第一个自变量
Second Independent Variable (可选) ——spline中的第二自变量
Spline Name——数据单元spline的名称
Derivative Order (可选) ——插值点的微分阶数,一般用0就可以
function = AKISPL(DX(marker_1, marker_2, marker_2), 0, spline_1)
spline_1用下表中的离散数据定义
自变量x 函数值y
-4.0 -3.6
-3.0 -2.5
-2.0 -1.2
-1.0 -0.4
0.0 0.0
1 0.4
2 1.2
3 2.5
4 3.6
4、碰撞函数impact
其实质是:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力。
格式:IMPACT (Displacement Variable, Velocity Variable, Trigger for Displacement Variable, Stiffness Coefficient, Stiffness Force Exponent, Damping Coefficient, Damping Ramp-up Distance) 参数说明:
Displacement Variable
实时位移变量值,通过DX、DY、DZ、DM等函数实时测量。
Velocity Variable
实时速度变量值,通过VX、VY、VZ、VM等函数实时测量。
Trigger for Displacement Variable
激发碰撞力的位移测量值。
Stiffness Coefficient or K
刚度系统。
Stiffness Force Exponent
非线性弹簧力指数。
Damping Coefficient or C
阻尼系数。
Damping Ramp-up Distance
当碰撞力被激发阻尼逐渐增大的位移值。
5、bistop函数
它的格式是BISTOP( x, dx, x1, x2, k, e, cmax, d)这里它由八个参数定义。
它与函数IMPACT类似。
可以这么说:BISTOP是双侧碰撞函数,而IMPACT是单侧碰撞函数。
BISTOP的触发是由两个边界条件确定的,即x1和x2,当x值大于或等于x1且小于或等于x2时,函数值为0,当x值大于x2或小于x1时,它的值是不同的。
当x小于x1时,返回值是:k(x1-x)^e-cmax*dx*step(x,x1-d,1,x1,0),当x大于x2时,返回值是:k(x-x2)^e-cmax*dx*step(x,x2,1,x2 d,0)。
各种参数表示意义可以从IMPACT里推出来,它只是多了一个x2。
本文出自: 模具家园论坛(/)
原文链接:/thread-22128-1-1.html
6.、设计变量(Design Variable)与状态变量(State Variable)的比较:设计变量只是一个预处理符号,给定值后,在仿真过程中不会改变,又称为ADAMS/View变量,在ADAMS/View 数据浏览器中简称为variable。
状态变量,其值在每个仿真步长中都在发生变化,又称为ADAMS/Solver变量,在ADAMS/View数据浏览器中称为ADAMS/Variable,而在ADAMS/Solver 数据集中称为VARIABLE。
7.MOTION函数
格式为MOTION(id,jflag,comp,rm)
Id:整型数据,指定MOTION的id号。
Jflag:整型数据,指定所需计算的力或力矩的MARKER点。
0:指定为I MARKER;1:指定为J MARKER。
Comp:整型数据,指定力或力矩的分量类型。
1=合力;
2=作用力在x方向的分量;
3=作用力在y方向的分量;
4=作用力在z方向的分量;
5=合力矩;
6=力矩在x方向的分量;
7=力矩在y方向的分量;
8=力矩在z方向的分量。
rm:指定坐标系,若设置为0,表示为全局坐标系。
例如:MOTION(.model_1.MOTION_1,0,5,0)
7、在使用ADAMS 进行建模和仿真时,与ADAMS/Solver有关的需要注意的问题如下:(1)建模时应尽量避免不连续的出现。
(2)在可行的情况下,总是首先进行STATIC 分析。
有时静平衡会比动力学分析更难达到。
到时只关心系统的动态行为而无法得到静平衡,可以增加STATIC D的Error或者跳过STATIC 分析。
(3)如果GSTIFF 在开始阶段就出错,或者根本无法开始计算。
这通常是初始条件(Initial Condition)造成的,这时应当设定Hinit值,使积分不至于在起步阶段发散。
(4)在一些特殊情况下,例如脉冲激励时,应通过Hmax来控制积分步长。
此时Hmax应当小于脉冲宽度。
(5)若计算结果存在明显不合理的尖峰,通常是由于积分步长的改变造成的,此时可以降低Hmax或者设Hinit=Hmax。
(6)STATIC 分析时很难的分析,尤其是初始位置离平衡位置远时。
当静平衡无法达到时,通常采用下列方法:
1)增大Maxit,如200;
2)调整Stability,采用逐步逼近的方法达到平衡;
3)减小Alimit,通常为30D,对于一些有问题的模型可以设定其为10D。