基于偏好免疫网络的油茶果采摘机器人图像识别算法_李立君
- 格式:pdf
- 大小:511.12 KB
- 文档页数:5

我国首台油茶果采收机正式进入产业化
邹敏
【期刊名称】《林业与生态》
【年(卷),期】2022()1
【摘要】2021年12月21日,中南林业科技大学与湖南农友农业装备股份有限公司签订油茶果采收技术成果转化合同,我国首台油茶果采收机正式进入产业化阶段.长期以来,油茶果的采摘完全依靠人工,"请人难,工费高"日益成为严重制约油茶产业发展的痛点和难点.为了解决这一难题,2008年,中南林业科技大学机电工程学院院长李立君率领团队刻苦攻关.2019年12月,李立君团队的"油茶果采摘关键技术及装备研究"通过成果鉴定,被认定为达到国际先进水平.
【总页数】1页(P48-48)
【作者】邹敏
【作者单位】不详
【正文语种】中文
【中图分类】F32
【相关文献】
1.油茶果的采收与贮藏方法
2.油茶果采收及干燥方式对油茶籽油品质的影响
3.油茶果采收应适时
4.油茶果分层采收装置设计与试验
5.我国首台带冷冻刀盘和复合式注浆系统双模盾构机正式下线
因版权原因,仅展示原文概要,查看原文内容请购买。

油茶果采摘机工作空间的分析及优化左二兵;李立君;高自成;刘银辉;李昕【摘要】Camellia fruit picking machine is a mechanical system working in the environment of non-structural. Combined with the Camellia tree's biological characteristics and the factors such as cultivation patterns etc., the boundary method was used to solve the working space of fruit pick actuator machine, and the optimization objectives that were set up to meet the minimum picking machine working space and the minimum sum of all arm length, thus obtaining the optimal actuators structure parameters. Through solving the positive solutions of actuator machine displacement, based on Matlab software and los method, the machine working space of the machine was simulated and analyzed, and the rationality of the machine structure parameter design was verified.%油茶果采摘机是工作在非结构环境下的机械系统,结合油茶树的生物学特性和栽培方式等因素,利用边界法求解采摘机执行机构的工作空间,建立以满足采摘机作业空间最小、各臂臂长之和最小为优化目标,得到优化后的执行机构结构参数;在求出执行机构位移正解的基础上,基于matlab蒙罗卡洛法对采摘机的工作空间进行仿真与分析,验证了采摘机结构参数设计的合理性.【期刊名称】《中南林业科技大学学报》【年(卷),期】2012(032)005【总页数】4页(P191-194)【关键词】采摘机;工作空间优化;蒙罗卡洛法;仿真分析【作者】左二兵;李立君;高自成;刘银辉;李昕【作者单位】中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004【正文语种】中文【中图分类】S776油茶果采摘作业是油茶生产最重要的环节之一,季节性强,劳动强度大。

基于改进凸壳理论的遮挡油茶果定位检测算法李立君;阳涵疆【期刊名称】《农业机械学报》【年(卷),期】2016(47)12【摘要】针对传统凸壳理论进行遮挡果实定位检测时由于过多剔除有效轮廓,造成目标果实定位误差较大,甚至无法识别目标果实的问题,提出了一种基于改进凸壳理论的遮挡油茶果定位检测算法.首先利用基于颜色特征的阈值分割法对油茶果遮挡图像进行目标分割,并通过预处理操作剔除图像中的背景噪声,获得目标果实的二值图像;然后采用凹点搜寻算法检测重叠目标的凹点,并根据凹点对重叠目标进行分离,获得相互独立的目标图像;再构建各独立目标的凸包,并提取凸壳,利用轮廓提取算法确定各独立目标凸壳上的有效轮廓;最后根据提取的有效轮廓求解目标果实形心坐标和半径,完成遮挡果实的定位检测.试验结果表明,改进算法平均耗时为0.491 s,比传统凸壳方法增加了24.07%,但其仅占油茶果采摘机器人单个果实采摘周期的2.46%,对于图像中的遮挡油茶果目标,改进方法的识别率达到93.21%,相比传统凸壳方法提升了7.47个百分点,改进算法的平均定位检测误差和平均重合度分别为5.53%和93.43%,比传统凸壳算法平均定位误差降低了6.22个百分点,平均重合度提高了6.79个百分点,表明文中所提出的方法能够较好地识别和定位自然环境中的遮挡油茶果.【总页数】9页(P285-292,346)【作者】李立君;阳涵疆【作者单位】中南林业科技大学机电工程学院,长沙410000;中南林业科技大学机电工程学院,长沙410000【正文语种】中文【中图分类】TP391.41【相关文献】1.基于改进线段分割检测的电线杆遮挡检测算法 [J], 李涛;陈黎;聂晖2.基于凸壳理论的遮挡苹果目标识别与定位方法 [J], 宋怀波;何东健;潘景朋3.基于改进R-FCN的多遮挡行人实时检测算法 [J], 刘辉;彭力;闻继伟4.基于改进Faster R-CNN的被遮挡电线杆检测算法 [J], 刘凯歌;王琪;孟祥越;张祥德5.基于改进YOLOv5的人脸遮挡物目标检测算法 [J], 赵元章;耿生玲因版权原因,仅展示原文概要,查看原文内容请购买。

基于Inventor的油茶果采摘机器人机械臂力学分析高自成;李立君;王勇桦;李翔宇;祝强【摘要】油茶是我国重要的经济林.随着油茶种植的规模化和产业化,实现油茶果机械化和自动化采摘成为急需解决的问题.本研究介绍了油茶果采摘机器人机械臂的结构设计,并利用Inventor软件对机器人机械臂进行了力学仿真和有限元分析试验.试验结果表明,机械臂副臂支撑、副臂和Y轴滑块在各种工作姿态和最优组合中的最大应力值较大,但均小于材料的屈服强度,进而验证了油茶果采摘机器人机械臂的安全性.【期刊名称】《中南林业科技大学学报》【年(卷),期】2015(035)007【总页数】5页(P121-124,130)【关键词】机械臂;力学分析;结构设计;采摘机器人;油茶果【作者】高自成;李立君;王勇桦;李翔宇;祝强【作者单位】中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004;中南林业科技大学机电工程学院,湖南长沙410004【正文语种】中文【中图分类】S776.22+2;S225.93油茶是一种木本油料树种,与油橄榄、油棕、椰子并称“世界四大木本油料树种”[1]。
茶油是油茶种子中提取获得的油脂,又名茶籽油、茶树油或山茶油,因其脂肪酸组成与世界著名的优质食用油橄榄油十分相似,故素有“东方橄榄油”之称[2]。
茶油不仅营养丰富,还具有重要的药用价值,能增强血管弹性和韧性,延缓动脉粥样硬化,增加肠胃吸收功能,促进内分泌腺体激素分泌,防治神经功能下降,提高人体免疫力等功效[3-5]。
由于茶油是一种的对人体健康有益的保健型营养油,适合于长期食用[6-7],故而其市场需求巨大。
我国是世界上油茶品种最多、分布最广、茶籽产量最高的国家[8-9]。
据国家林业局统计,我国的油茶产量已经从2008年的20多万吨增加到了2012年的45万吨,产值由110亿元增加到了390亿元[10]。
谈我国油茶果机械化采摘设备研究现状倪金明1王永友1詹文勇21 舒城县林业局2 安徽德昌苗木有限公司DOI:10.32629/as.v2i4.1644[摘 要] 从本质上分析,油茶果成熟具有极强的季节性,所以采摘直接影响着油茶果和茶油的品质。
本文以我国油茶果采摘为切入点,在分析油茶果机械化采摘设备现状的同时,也对油茶果机械化采摘设备面临的问题与未来发展态势进行了研究。
[关键词]油茶果;机械化;采摘设备;研究现状;发展态势油茶作为南方地区的特有植物,也是关系到乡村振兴的一项产业。
现如今,我国油茶产业发展正面临着严峻挑战,比如油茶的种植问题、经营问题、采摘问题等,尤其是油茶果机械化采摘,已处于发展瓶颈状态。
通常情况下,油茶果采摘时间在十月份,且采摘期很短。
若成熟的油茶果未能及时采摘,就会自然脱落,从而影响油茶果和茶油的品质;若受到不良气候影响,且没进行及时采摘,就会严重影响油茶果的产量。
与此同时,油茶果生长特性也会对机械化采摘造成影响,当油茶果成熟后果实与花苞是同时存在的,若在机械化采摘过程中造成花苞破损或是掉落,就会造成下一年油茶果产量直线下降。
基于此,分析与研究我国油茶果机械化采摘设备具有现实意义。
1 油茶果采摘特性1.1采摘期较短油茶果采摘的一大特性就是极强的季节性,何时采摘直接影响着油茶果和茶油的质量。
若是采摘较早,果实含水量就偏高,影响了产油效果。
根据相关试验研究得出,如果比正常采摘期提前10天左右进行采摘,那么油茶果自身的产油率最高仅能达到正常采摘期的9成。
所以必须在油茶果的采摘期完成采摘,才可保证油茶果的质量,创造更多的效益。
若是油茶果的采摘晚于正常采摘期,那么油茶果就可能会自然开裂,从而使得油茶籽脱落,严重影响油茶果产油率,从而给茶农带来巨大的经济损失。
事实上,油茶果自成熟至开裂仅需十余天,所以油茶果的采摘期十分短,这也是影响油茶经营与发展的重大原因之一。
1.2采摘难度较大我国油茶种植基本分布在华东、西南、华南等地区,多为山地丘陵,具有较大的地面高差,交通条件较差。
柑橘采摘机器人图像识别算法研究柑橘采摘机器人作为现代农业技术的重要创新之一,通过使用自动化机器人实现柑橘的快速、高效采摘,提高了农业生产效率。
其中,图像识别算法是确定柑橘的成熟度和位置的关键技术。
本文旨在对柑橘采摘机器人图像识别算法进行研究,并探讨其应用前景。
1. 算法原理柑橘采摘机器人图像识别算法基于计算机视觉技术,通过处理柑橘的图像数据,识别柑橘的成熟度和位置,从而实现自动采摘。
算法主要包括以下几个关键步骤:1.1 图像获取柑橘采摘机器人通过搭载高清摄像头或传感器获取柑橘图像。
摄像头应具备高分辨率和高感光度,以确保获取到清晰、准确的柑橘图像。
1.2 图像预处理通过图像预处理技术,对采集到的柑橘图像进行去噪、增强和调整。
去噪操作能够降低图像中的干扰噪声,增强操作可以提高图像的对比度和亮度,使得柑橘的特征更加鲜明,调整操作则是将图像调整到最佳的观察范围。
1.3 特征提取通过特征提取算法,从预处理后的图像中提取柑橘的特征信息。
常用的特征包括颜色、形状和纹理等。
通过对这些特征进行分析和提取,可以准确识别出柑橘的成熟度。
1.4 分类与定位利用机器学习算法,将提取到的特征与训练集进行比对和分类,从而确定柑橘的成熟度。
同时,结合图像处理技术,实现柑橘的定位,确定机器人采摘的具体位置。
2. 算法优化与改进为了提高柑橘采摘机器人的准确性和效率,需要对图像识别算法进行不断的优化和改进。
以下是几种常见的算法优化方法:2.1 深度学习算法深度学习算法通过构建神经网络结构,实现对大量数据的训练和学习,进一步提高图像识别的准确性。
深度学习算法能够自动提取图像中的关键特征,从而更加精确地识别柑橘的成熟度和位置。
2.2 目标检测算法传统的图像识别算法主要关注图像的分类,而目标检测算法则更加注重识别图像中的目标物体,并标定其位置和大小。
通过引入目标检测算法,可以提高柑橘采摘机器人的精确定位能力,减少采摘时的误差。
2.3 多传感器融合柑橘采摘机器人可以通过搭载多种传感器(如红外线传感器、激光传感器等)来获取更加丰富的图像信息。
山东农业科学 2021,53(10):140~148ShandongAgriculturalSciences DOI:10.14083/j.issn.1001-4942.2021.10.022采摘机器人分割与识别算法的研究现状李天华1,2,3,孙萌1,娄伟1,2,张观山1,2,李玉华1,2,李钦正1(1.山东农业大学机械与电子工程学院,山东泰安 271018;2.山东省农业装备智能化工程实验室,山东泰安 271018;3.农业部黄淮海设施农业工程科学观测实验站,山东泰安 271018) 摘要:针对人工采摘效率低、成本高且劳动力缺乏的问题,利用采摘机器人实现果实的自动化采摘日益成为研究的热点。
视觉识别作为采摘机器人的关键技术之一,其发展对实现自动化采摘具有重要意义。
采摘环境的复杂性为机器人正确识别目标带来了困难,使得目前的识别算法研究仍面临着较大的挑战。
本文阐述了常见的几种目标分割识别算法,并将其归纳为基于特征、像素和深度学习的三类识别方法,综述了国内外学者在采摘机器人识别目标时应用到的分割和识别算法,并对目前存在的问题进行总结,同时对今后的研究趋势进行展望,以期为采摘机器人的研究设计提供参考。
关键词:采摘机器人;分割算法;识别算法中图分类号:S126 文献标识号:A 文章编号:1001-4942(2021)10-0140-09ResearchStatusofPickingRobotSegmentationandRecognitionAlgorithmsLiTianhua1,2,3,SunMeng1,LouWei1,2,ZhangGuanshan1,2,LiYuhua1,2,LiQinzheng1(1.CollegeofMechanicalandElectricalEngineering,ShandongAgriculturalUniversity,Taian271018,China;2.ShandongProvincialEngineeringLaboratoryofAgriculturalEquipmentIntelligence,Taian271018,China;3.ScientificObservingandExperimentalStationofEnvironmentControlledAgriculturalEngineeringinHuanghe Huaihe HaiheRegion,MinistryofAgriculture,Taian271018,China)Abstract Inviewoftheproblemsoflowefficiency,highcostandlackoflaborforceofmanualpicking,theautomaticpickingoffruitsbypickingrobotshasbecomeahotresearchtopic.Asoneofthekeytechnolo giesofpickingrobot,thedevelopmentofvisualrecognitionisofgreatsignificancetorealizeautomaticpick ing.Thecomplexityofpickingenvironmentmakesitdifficultforrobottocorrectlyidentifythetarget,sotheresearchonthecurrentrecognitionalgorithmisstillfacinggreatchallenges.Thispaperexpoundsseveralcom monkindsoftargetsegmentationandrecognitionalgorithms,andtheyweresummarizedasthreekindsofrec ognitionmethodsbasedonfeature,pixelsanddeeplearningapproach.Thescholarsathomeandabroadwerereviewedinsegmentationandrecognitionalgorithmsforpickingrobotsandappliedtoidentifythetargets.Theexistingproblemswerealsosummerized,atthesametime,theresearchtrendinthefuturewaspointedout,whichwasexpectedtoprovidereferencesfortheresearchanddesignofpickingrobot.Keywords Pickingrobot;Segmentationalgorithm;Recognitionalgorithm收稿日期:2021-08-10基金项目:山东省现代农业产业技术体系蔬菜产业创新团队项目(SDAIT-05-11);山东省重大科技创新工程项目(2019JZZY020620);山东省农业重大应用技术创新项目(SD2019NJ004)作者简介:李天华(1976—),男,山东泰安人,博士,教授,主要从事智能农机装备研究。
2012年11月农业机械学报第43卷第11期DOI :10.6041/j.issn.1000-1298.2012.11.039基于偏好免疫网络的油茶果采摘机器人图像识别算法*李立君李昕高自成周健闵淑辉(中南林业科技大学机电工程学院,长沙410004)【摘要】针对油茶果采摘机器人视觉识别中外界物体的形态学特性要求,采用了偏好人工免疫网络算法作为机器视觉的图像识别算法,并根据采摘环境及采摘对象的特点对算法结构进行了改进,增强了算法的识别率。
仿真实验表明,采用偏好人工免疫网络算法对油茶果的识别率在晴天时达到了81.67%,阴天时达到了87.69%,满足采摘识别率的要求。
关键词:油茶果采摘机器人偏好人工免疫网络图像识别中图分类号:TP391.41文献标识码:A文章编号:1000-1298(2012)11-0209-05Camellia Fruit Image Recognition Based on Preference Artificial Immune NetLi LijunLi XinGao ZichengZhou JianMin Shuhui(College of Mechanical and Electrical Engineering ,Central South University of Forestry and Technology ,Changsha 410004,China )AbstractWith the demanding of morphological features recognition in picking robot machine-vision system ,preference artificial immune net (aiNet )was used as the image recognition algorithm ,mainly modified the structure of the algorithm to promote the accuracy rate.The algorithm was modified according to picking environment and real-time require.The simulation proved the clustering accuracy of preference aiNet reached to 81.67%in the sunny day and 87.69%in the cloudy day.The modified algorithm has certain meaning in the next research of picking robot.Key wordsCamellia fruit ,Picking robot ,Preference artificial immune net ,Image recognition收稿日期:2011-12-05修回日期:2011-12-21*林业公益性行业科研专项基金资助项目(201104090)作者简介:李立君,教授,博士生导师,主要从事林业技术与装备研究,E-mail :junlili1122@163.com 引言油茶树,果实体积小、多数分布集中,大部分果实成熟时颜色呈淡黄色或暗红色、少部分果实颜色呈绿色,与树叶颜色相近。
2012年11月农业机械学报第43卷第11期DOI :10.6041/j.issn.1000-1298.2012.11.039基于偏好免疫网络的油茶果采摘机器人图像识别算法*李立君李昕高自成周健闵淑辉(中南林业科技大学机电工程学院,长沙410004)【摘要】针对油茶果采摘机器人视觉识别中外界物体的形态学特性要求,采用了偏好人工免疫网络算法作为机器视觉的图像识别算法,并根据采摘环境及采摘对象的特点对算法结构进行了改进,增强了算法的识别率。
仿真实验表明,采用偏好人工免疫网络算法对油茶果的识别率在晴天时达到了81.67%,阴天时达到了87.69%,满足采摘识别率的要求。
关键词:油茶果采摘机器人偏好人工免疫网络图像识别中图分类号:TP391.41文献标识码:A文章编号:1000-1298(2012)11-0209-05Camellia Fruit Image Recognition Based on Preference Artificial Immune NetLi LijunLi XinGao ZichengZhou JianMin Shuhui(College of Mechanical and Electrical Engineering ,Central South University of Forestry and Technology ,Changsha 410004,China )AbstractWith the demanding of morphological features recognition in picking robot machine-vision system ,preference artificial immune net (aiNet )was used as the image recognition algorithm ,mainly modified the structure of the algorithm to promote the accuracy rate.The algorithm was modified according to picking environment and real-time require.The simulation proved the clustering accuracy of preference aiNet reached to 81.67%in the sunny day and 87.69%in the cloudy day.The modified algorithm has certain meaning in the next research of picking robot.Key wordsCamellia fruit ,Picking robot ,Preference artificial immune net ,Image recognition收稿日期:2011-12-05修回日期:2011-12-21*林业公益性行业科研专项基金资助项目(201104090)作者简介:李立君,教授,博士生导师,主要从事林业技术与装备研究,E-mail :junlili1122@163.com 引言油茶树,果实体积小、多数分布集中,大部分果实成熟时颜色呈淡黄色或暗红色、少部分果实颜色呈绿色,与树叶颜色相近。
油茶果这些特点与自然界采摘环境中光斑、障碍物等因素相似,给果实图像的识别带来很大困难。
在农林业图像分割识别中常采用人工神经网络[1 2]、支持向量机[3 4]、模糊聚类[5]、色差阈值分割[6 7]、多元统计聚类[8]等方法,但这些识别算法在实时性要求较强的采摘环境下存在缺点,如神经网络算法由于具有训练过程且训练时间较长,不适合实时性要求较高的采摘机使用;支持向量机算法虽然具有训练过程较短的优点,但是其算法设计适合于二分类,不适用于油茶果采摘条件下的多目标聚类分析;在杂质干扰较多的外界环境中,模糊聚类算法会大幅度增加识别的时间。
油茶果大部分集中分布在从树表向里深度大约在300mm 的范围内,树干和粗大树枝上油茶果非常少,另外在离地500mm 高度内,枝叶、果都比较少,可以不考虑在采摘范围内。
为有效实时地识别油茶果,提高采摘效率,本文提出使用偏好人工免疫网络识别果实形态学参数的方法。
1目标形状特征提取将采集的彩色图像转换为灰度图像以提高图像的处理速度,灰度图像中包含了亮度信息,滤除了彩色信息,可以较好地反映外界采摘中的光影情况。
灰度化处理后的图像应进行光影处理使图像达到预定的数值范围,便于后续处理。
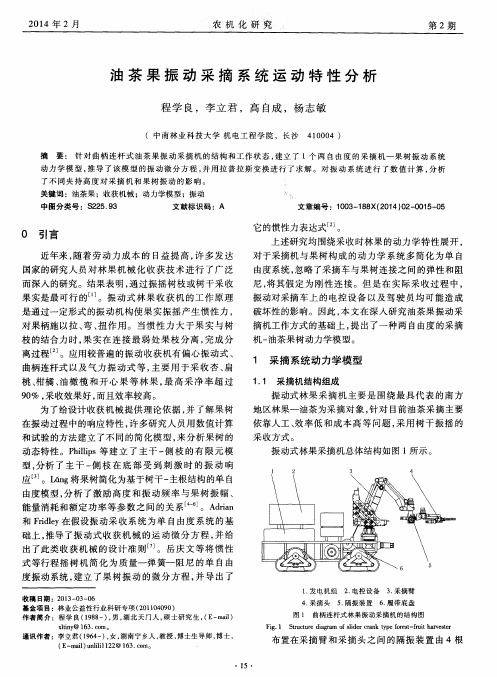
对由拍摄条件或光线条件等原因造成直方图分布散乱的图片,先进行直方图均衡化,再取图像阈值,如图1所示。
图1油茶果实及花瓣灰度直方图Fig.1Gray histogram of fruit and petal(a)油茶果实(b)油茶花瓣使用最大方差阈值法[9]求灰度图的分割阈值,其表达式为δ2(T)=w0(μ0-μ)2+w1(μ1-μ)2=w 0w1(μ1-μ)2(1)式中δ2(T)———最大阈值方差T———图像阈值w 0、w1———前景、背景权重μ、μ0、μ1———图像的灰度平均值、前景灰度平均值、背景灰度平均值为了更好地辨识目标果实,使用求得的灰度图像阈值对图像进行二值化处理,初始的二值化图像中包含了光斑等大量非果实信息,将严重干扰后续的物体辨识工作,故此对二值图像进行后期处理以滤除大部分噪声或杂质。
后处理实验中采用了降噪、平滑、腐蚀、膨胀、边缘处理等数学形态学处理方法[10],达到了较好的效果,如图2所示。
图2灰度阈值法分割原图与最终效果图Fig.2Origin figure and processed figure by gray-threshold(a)原图像(b)分割后图像采摘图像在经过灰度阈值法分割及形态学后处理后,仍然包含有大量信息,例如果实、树枝、树叶、光斑等杂质,其中太阳斑点对采摘图像干扰最大。
在晴天时图像光斑等干扰较大,阴天时干扰较小。
采摘前必须先从图像上找到果实所在的区域,再对该区域实施采摘。
参考前人在特征提取方面的工作[11 13],本文确定的样本形态特征要素为面积A、周长S、长度L、宽度W,主要参数选取延伸率E= L/W、紧度C=S/A2、圆形度R=4πA/S2、圆满度F= 4A/(πL2)等作为单个物体的形态特征,以上4个参数均具备RST不变性[14](旋转、比例、平移变化恒定),适用于形态学识别。
2偏好人工免疫网络算法2.1偏好人工免疫网络算法结构根据文献[15]中的思想,把决策者的偏好信息融入研究中可以较好地增加人工免疫网络[16]的聚类识别率,基于此原理,Shaw等[17]将偏好信息多目标优化应用于生成调度问题,Pierro等[18]用偏好信息区分不同的个体,杨咚咚等[19]提出了一种偏好等级的克隆算法以求解多目标优化问题。
本文在这些研究的基础上,提出基于偏好信息的人工免疫网络(preference aiNet)算法,并将其应用于油茶果识别中,偏好抗体类似于教师抗体,为拟提取目标的形态学参数。
可以使网络以偏好抗体为中心收敛,从而加快算法收敛速度、提高算法识别率。
偏好免疫网络中的拥挤距离是根据目标空间中抗体与周围数据之间的亲和度判定的,拥挤距离是对抗体与偏好抗体拥挤程度的度量准则,一个抗体d在其种群D中的拥挤距离定义为I(d,D)=∑ki=1‖X i-X j‖(d∈D)(2)式中X j———偏好抗体数据Xi———其他抗体数据012农业机械学报2012年在偏好算法中引入克隆等级的概念,即抗体与偏好抗体的拥挤距离越小克隆等级越大,拥挤距离越大克隆等级越小。
抗原等级与拥挤距离的设定有利于赋予抗体克隆优先权,保持抗体克隆的多样性。
克隆等级定义为T c(a1+a2+…+an)=T1(a1)+T2(a2)+…+T n(an)(3)式中T c———克隆系数a 1、a2、…、an———待克隆的网络细胞T1、T2、…、T n———根据各网络细胞实际拥挤程度定义的单体克隆系数在人工免疫网络及其改进算法中,网络抑制阈值的数值是由手工给定的,在实际应用条件下缺乏灵活性,偏好免疫网络算法根据网络中的数据分布情况自适应地确定,不需要手工定义聚类数目与抑制阈值,使整个网络具备自定义抑制阈值的功能,其表达式为σs=k ∑ni=1(x-x')n-1(4)式中x'———网络中任一个数据点,分子是这个数据点与网络中所有数据点距离的和σs———阈值均值k———阈值系数k可以根据网络中的数据总体分布情况调整,利用自适应确定阈值的方法在油茶果的实时采摘环境中更具有实用性。
在经典人工免疫网络算法中,经过抗体死亡和网络抑制的抗体经过新的抗体网络与抗原进行下一步匹配,可以将欲提取的数据作为先验知识,并以先验知识作为免疫疫苗,在偏好人工免疫网络算法中将疫苗注入到抗体网络中形成记忆抗体,以先验知识作为疫苗注入抗体有助于使网络具有先验知识特性,而疫苗的规模控制又可以在允许的范围控制记忆网络多样性和聚类正确率。
Mi =[Mi;H](5)其中H=pM f式中M i———最优记忆网络Mf———先验知识抗体p———疫苗控制系数,可控制的复制抗体规模2.2偏好人工免疫网络算法流程(1)按照油茶果参数生成一定数量的偏好抗体。
(2)随机从待识别数据中抽取抗原作为网络的初始输入抗体数据。
(3)计算所有输入抗原细胞的亲和力。
(4)对每个网络细胞按式(3)进行克隆。
(5)对克隆细胞变异,变异概率与父代亲和力成反比,并保留父代群体于网络中。
变异公式为C'=ρ+αN(0,1)(6)α=exp(-f)/β(7)式中C'———细胞ρ产生变异后形成的新细胞N(0,1)———均值为0、标准偏差为1的高斯随机变量β———用于控制函数指数衰减的变量f———经过标准化处理后细胞适应值(6)计算变异后网络细胞的亲和力。
(7)选择亲和力最高的网络细胞组成新的网络,并计算新网络的细胞亲和力。
(8)计算网络中所有细胞的亲和力,淘汰亲和力最低的5%的抗体细胞,设定抗体细胞死亡,保留其他抗体细胞。
(9)根据阈值表达式(4)产生网络抑制阈值对网络进行抑制。
(10)取油茶果形态学参数的先验知识作为疫苗,注入一定比例的疫苗及随机生成细胞到抗体网络,并返回步骤(2)。
(11)输出产生的网络细胞。
2.3偏好人工免疫网络算法仿真对比分析使用UCI数据集中Iris数据对经典免疫网络算法与偏好免疫网络算法进行对比分析,在默认系数为k=1,p=0.3时,使用Versicolor数据作为偏好抗体,在识别数据集中的Versicolor数据时,偏好免疫网络算法的识别率在无干扰、轻度随机干扰和高度随机干扰3种情况下较经典算法分别增加了13.17%、8.77%和6.51%,平均识别率增加了9.48%。