基于Backstepping的高超声速飞行器模糊自适应控制_高道祥
- 格式:pdf
- 大小:1.16 MB
- 文档页数:6

基于模糊自适应的高超声速飞行器控制设计随着科技的不断发展,高超声速飞行器的研究成为了重要的领域之一。
高超声速飞行器是指在大气层高速飞行的飞行器,具有超过5马赫的飞行速度。
由于其在高速飞行过程中的特殊性质,这些飞行器的设计及控制变得更加复杂。
因此,在高超声速飞行器的控制系统设计中,模糊自适应的控制方法被广泛应用。
模糊自适应控制方法是在控制系统中应用模糊逻辑的基础上,通过不断调整模糊逻辑的规则和模糊量,从而达到控制器自适应调节的目的。
在高超声速飞行器的控制中,模糊自适应控制方法可以应用于飞行器的姿态控制、航向控制和位置控制等方面。
姿态控制是指在空中运行时,飞行器姿态的偏差对其运动轨迹和飞行稳定性的影响。
在高超声速飞行器中,由于其高速飞行的特性,姿态控制变得尤为重要。
在姿态控制中,可以采用模糊自适应控制方法来制定一个控制器,以减小姿态误差。
该控制器可以通过检测飞行器的旋转角速度、角度、角速度变化率以及加速度等参数进行自适应调控。
在航向控制中,需要控制飞行器沿始发地点和目的地之间的航线进行飞行。
在高超声速飞行器中,航向错位可能会导致飞行器进入高速不稳定的状态,进而造成事故。
采用模糊自适应控制方法可以对飞行器的航向进行自适应调节,使飞行器沿所需的航线飞行。
位置控制是指控制飞行器在飞行过程中的空间位置。
高超声速飞行器控制中的大部分任务都要求精确的位置控制,因此,模糊自适应控制方法可以应用于该控制任务。
在位置控制中,控制器需要鉴别当前飞行器的位置和速度,并控制适当的加速度以使飞行器沿着期望轨道飞行。
总之,基于模糊自适应的高超声速飞行器控制设计在实践中取得了良好的应用效果。
随着高超声速飞行器的广泛应用,该技术将成为必需的领域之一。
未来,我们可以预见,随着更为先进的高超声速飞行器的问世,基于模糊自适应的高超声速飞行器控制设计将持续发挥着重要的作用。

基于Backstepping模糊自适应的四旋翼飞行器控制张硕;张学典;秦敏;陈征【摘要】针对四旋翼飞行器轨迹跟踪模型中所受到的外界扰动和参数不确定性等问题,设计了基于模糊自适应反步法的控制策略.在姿态系统中,利用反步法设计控制器,对系统中不确定函数部分采用模糊逻辑系统进行在线逼近.对飞行器运动轨迹进行了跟踪仿真,取得了较为理想的控制效果,验证了该方法的可行性.【期刊名称】《电子科技》【年(卷),期】2017(030)002【总页数】4页(P54-57)【关键词】模糊控制;四旋翼飞行器;非线性系统;反步法【作者】张硕;张学典;秦敏;陈征【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】V249.1;TP273+.4针对四旋翼飞行控制的研究已有很多经典的控制方法,例如自适应鲁棒方法、反步法、滑模控制方法、人工智能方法、以及优化方法等。
反步法(Backstepping)又称反向递推控制。
这种方法的主要设计思想是将多维非线性系统分解成多个子系统,并在每个子系统中设计虚拟控制律和Lyapunov能量函数,一直反推到最后一个子系统并完成真正的控制律的设计,通过构造的能量函数来最终保证系统稳定性和动态性能。
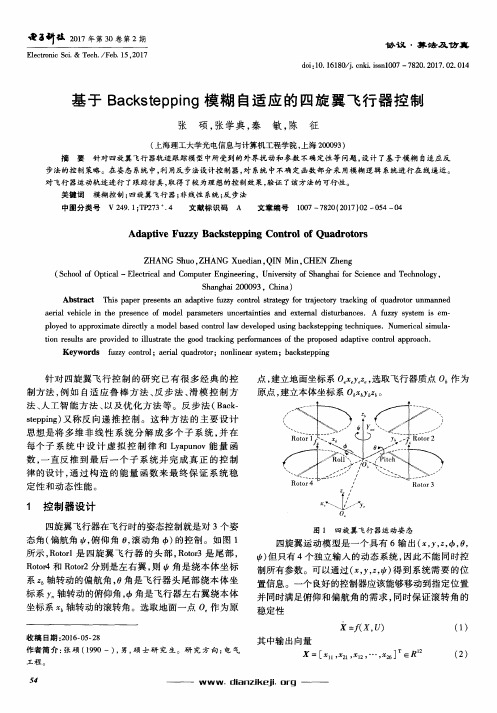
四旋翼飞行器在飞行时的姿态控制就是对3个姿态角(偏航角ψ,俯仰角θ,滚动角φ)的控制。
如图1所示,Rotor1是四旋翼飞行器的头部,Rotor3是尾部,Rotor4和Rotor2分别是左右翼,则ψ角是绕本体坐标系zb轴转动的偏航角,θ角是飞行器头尾部绕本体坐标系yn轴转动的俯仰角,φ角是飞行器左右翼绕本体坐标系xb轴转动的滚转角。
选取地面一点Oe作为原点,建立地面坐标系Oexeyeze,选取飞行器质点Ob作为原点,建立本体坐标系Obxbybzb。

基于跟踪微分器的高超声速飞行器Backstepping控制发布时间:2021-06-17T06:34:19.689Z 来源:《现代电信科技》2021年第1期作者:于智洋[导读] 虽然Backstepping方法已广泛应用于HFV控制器设计中,但其自身存在“微分项膨胀”问题,在控制器设计过程中必须予以解决。
(天津华翼蓝天科技股份有限公司天津 300384)摘要:虽然Backstepping方法已广泛应用于HFV控制器设计中,但其自身存在“微分项膨胀”问题,在控制器设计过程中必须予以解决。
本文提出一种基于Backstepping和跟踪微分器的HFV跟踪控制方法。
引入待跟踪状态与理想控制指令之间的实际误差作为反馈量。
利用跟踪微分器求取信号的一阶导数,提高了控制器对控制增益变化的适应性。
关键词:跟踪微分器;高超声速飞行器;Backstepping控制高超声速飞行器(Hypersonic flight vehicle,HFV)是指飞行马赫数大于5的一类飞行器。
其具有机动灵活、突防能力强、拦截难度大等特点,自其出现以来便受到各航空航天大国的高度重视。
目前,采用乘波体构型的吸气式高超声速飞行器受到更多的关注。
然而,这类高超声速飞行器模型具有高度非线性、强耦合、参数不确定等特点,且外部飞行环境恶劣,因此为其设计飞行控制系统非常具有挑战性。
很多学者基于Backstepping方法为HFV设计飞行器控制器,并取得了很好的效果。
1高超声速飞行器数学模型高超声速飞行器的纵向动力学模型如下:其中为升降舵偏转角与燃油当量比。
q与为动压与大气密度,S、c、Tz分别为参考面积、平均气动弦长和推力力矩耦合系数。
2非线性控制器设计控制器设计的重点和难点在于:(1)Backstepping方法设计过程需要求取虚拟控制量导数,而采用传统动态面方法实现较为简单,但对控制增益的变化适应性较差,从而影响控制精度;(2)控制器设计过程中需要对模型中的干扰项进行估计,而模型中的干扰项受多方面因素影响,难以通过一定的假设对其进行限制。
![基于神经网络的高超声速飞行器自适应补偿控制方法[发明专利]](https://img.taocdn.com/s1/m/a9d787edcc17552706220815.png)
专利名称:基于神经网络的高超声速飞行器自适应补偿控制方法
专利类型:发明专利
发明人:胡庆雷,李梓明,郭雷,王陈亮
申请号:CN201810262739.8
申请日:20180328
公开号:CN108375907A
公开日:
20180807
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于神经网络的高超声速飞行器自适应补偿控制方法,包括以下步骤:建立高超声速飞行器的纵向动力学模型,并将其分解为姿态子系统和速度子系统;建立高超声速飞行器的升降舵故障模型;构建平滑函数来估计非线性输入饱和,并引入径向基函数神经网络来估计高超声速飞行器的纵向动力学模型中的非线性函数;通过反步法设计高超声速飞行器的自适应补偿控制器及相应的自适应参数更新律。
本发明提供了一种考虑了升降舵故障以及输入饱和的径向基神经网络自适应补偿控制方法,解决了高超声速飞行器飞行过程中各类升降舵故障以及执行器饱和对飞行器的影响,保证了系统的容错能力和鲁棒性。
申请人:北京航空航天大学
地址:100191 北京市海淀区学院路37号
国籍:CN
更多信息请下载全文后查看。

基于滚动时域估计的高超声速飞行器轨迹跟踪
臧红岩;王凯;高长生;荆武兴;王越欣
【期刊名称】《现代防御技术》
【年(卷),期】2024(52)2
【摘要】针对高超声速飞行器高精度轨迹跟踪问题,提出一种将滚动时域估计与交互式多模型算法相结合的强机动目标轨迹跟踪算法。
给出了半速度系下的高超声速飞行器滑翔段运动模型及量测模型。
利用滚动时域估计方法将状态估计问题转化为有约束的优化问题,并充分考虑飞行器滑翔段物理约束。
在此基础上,为应对目标不同机动模式,借助交互式多模型算法思想建立模型集对其进行近似。
分别在机动模式不变和机动模式突变的情况下对算法进行了验证。
结果表明,新算法采用多个模型并行估计,即时调整模型概率后进行融合输出,能够有效避免目标跟踪模型失配,可显著提高对于高超声速飞行器这类强机动目标的轨迹跟踪精度。
【总页数】13页(P132-144)
【作者】臧红岩;王凯;高长生;荆武兴;王越欣
【作者单位】哈尔滨工业大学航天学院
【正文语种】中文
【中图分类】TJ765
【相关文献】
1.基于LADRC的RBCC高超声速飞行器轨迹跟踪
2.基于气动性能分析的高超声速滑翔飞行器轨迹估计
3.基于高斯伪谱法的高超声速飞行器轨迹优化与跟踪控制
4.
基于MPC的带动力高超声速飞行器轨迹跟踪5.一种弹性高超声速飞行器的轨迹跟踪控制算法
因版权原因,仅展示原文概要,查看原文内容请购买。
一种干扰补偿的高超声速变后掠翼飞行器跟踪控制方法高超声速飞行器的跟踪控制是航空领域中的一个关键问题。
由于高超声速飞行器的飞行速度快,飞行过程中面临的干扰较大,因此需要有效的控制方法来提高飞行器的稳定性和控制精度。
本文提出了一种干扰补偿的高超声速变后掠翼飞行器跟踪控制方法,旨在解决高超声速飞行器跟踪过程中的干扰问题,以提高飞行器的控制精度和稳定性。
1. 高超声速变后掠翼飞行器的跟踪控制需求高超声速飞行器是指飞行速度超过5倍音速的飞行器。
由于高超声速飞行器飞行速度快,飞行过程中会遇到较大的气动力和干扰,给跟踪控制带来了困难。
因此,需要开发一种有效的跟踪控制方法来解决这个问题。
2. 干扰对高超声速变后掠翼飞行器跟踪控制的影响干扰是指飞行器在飞行过程中受到的各种外界因素的影响,如气动力、风速、湍流等。
这些外界因素会引起飞行器偏离预定轨迹,影响跟踪控制的性能。
因此,需要采取措施来补偿干扰,提高跟踪控制的精度和稳定性。
3. 干扰补偿的原理与方法干扰补偿是通过对干扰进行监测、分析和预测,并利用控制系统进行补偿,使飞行器能够准确跟踪预定轨迹。
具体的干扰补偿方法可以包括模型预测控制、自适应控制、模糊控制等。
在本文中,我们提出了一种基于模型预测控制的干扰补偿方法。
4. 基于模型预测控制的干扰补偿方法模型预测控制是一种基于模型的控制方法,它通过预测系统的未来状态,并根据预测结果进行控制,以实现对系统的稳定性和精确性的控制。
在基于模型预测控制的干扰补偿方法中,首先需要建立高超声速变后掠翼飞行器的数学模型,并进行参数辨识。
然后,通过预测系统的未来状态,获取到干扰的信息。
最后,利用控制器对干扰进行补偿,使飞行器能够准确跟踪预定轨迹。
5. 举例说明为了更好地理解基于模型预测控制的干扰补偿方法,我们以某种高超声速变后掠翼飞行器为例。
首先,我们建立了该飞行器的数学模型,并通过实验进行参数辨识。
然后,在飞行过程中,我们监测并分析了干扰的来源和影响。
基于自抗扰控制技术的高超声速飞行器控制研究基于自抗扰控制技术的高超声速飞行器控制研究近年来,高超声速飞行器在航空航天领域引起了广泛的关注。
高超声速飞行器的出现不仅极大地推动了航空技术的发展,也对飞行器控制技术提出了更高的要求。
由于高超声速飞行器的特殊工况,传统的控制方法已经无法满足需求,因此,研究基于自抗扰控制技术的高超声速飞行器控制成为了一个重要课题。
高超声速飞行器控制涉及到多个方面的问题,如姿态控制、飞行路径跟踪和飞行稳定性等。
其中,姿态控制是高超声速飞行器控制中最为关键的一环。
由于高超声速飞行器的高速飞行特性,其姿态变化剧烈,传统的姿态控制方法已经无法满足需求。
因此,基于自抗扰控制技术的姿态控制成为了高超声速飞行器控制的研究热点。
基于自抗扰控制技术的姿态控制,主要通过引入扰动观测器和控制器来实现。
扰动观测器可以对外部扰动进行估计和补偿,从而使系统具备更好的抗干扰能力。
控制器通过根据扰动观测器的估计结果进行修正,实现对飞行器姿态的精确控制。
通过引入自抗扰控制技术,可以提高姿态控制系统的鲁棒性和稳定性。
在高超声速飞行器的控制研究中,利用自抗扰控制技术能够解决多种问题。
首先,由于高超声速飞行器飞行速度较快,飞行器表面会受到强烈的气动力和热载荷的影响,这些扰动会对姿态控制系统产生较大的影响。
利用自抗扰控制技术,可以精确估计和补偿这些扰动,使飞行器姿态控制系统具备更好的鲁棒性。
其次,高超声速飞行器由于飞行速度较快,对操纵输入的敏感性较高。
传统的姿态控制方法很难应对高超声速飞行器在不同工况下对操纵输入的高要求。
利用自抗扰控制技术,可以通过引入控制器来修正操纵输入,以实现高超声速飞行器在不同工况下的精确控制。
最后,高超声速飞行器的飞行特性非常复杂,例如激波和边界层的相互作用以及失稳现象等。
传统的控制方法很难满足高超声速飞行器对飞行稳定性的要求。
利用自抗扰控制技术,可以实现对飞行器飞行稳定性的优化。
综上所述,基于自抗扰控制技术的高超声速飞行器控制研究具有重要的实际意义。