影像融合流程
- 格式:doc
- 大小:38.50 KB
- 文档页数:3
遥感影像融合方法分析遥感影像的融合是对来自同一区域的多源图像数据进行综合处理,以获得对该区域更为准确、全面、可靠的影像描述。
由于遥感影像融合的这一特点,使得这一技术在遥感中有着很重要的作用,这一技术也成为近几年国际遥感界的研究热点。
本文研究了目前学术界提出的几种较为流行的影像融合算法,对它们的特点进行了分析,同时给出了影像融合的效果的评价准则。
标签:遥感;影像;融合引言随着遥感技术的发展,各种各样的传感器也不断出现,对于同一地区,我们可以得到用不同传感器获取的不同尺度、不同时相特别是不同光谱信息的遥感影像数据。
不同源的数据反映了区域的不同方面的特征,如何合理的综合利用这些多源数据,对于遥感应用十分关键。
显然,影像融合为我们提供了一个很好的途径。
影像融合就是将不同源的数据配准后变换到同一尺度、同一坐标系,然后采用一定的融合方法将各种数据的信息充分的结合起来,产生一种更适合应用的影像数据的新技术。
图像融合一般分为三个层次:①像素级融合。
像素级融合也称数据级融合,是指对传感器采集来的数据进行采集、分析和处理,生成目标特征而获得融合图像;②特征级融合。
是指对预处理和特征提取后获得的景物信息如边缘、形状、轮廓、方向、区域和距离等信息进行综合与处理;③决策级融合。
是指根据一定的准则以及每个决策的可信度作出最优决策,数据融合的容错能力即由此而来。
图像融合的算法有很多,传统的算法主要有:HIS变换的融合、小波变换融合、主成分变换融合、高通滤波变换法、比值运算法、Brovey变换法等等,最近也提出了一些新的或改进型的图像融合算法,比如Contourlet变换融合、基于HSV变换与atrous变换的图像融合、一种基于最大区域熵值的图像融合方法、基于小波包的融合等等。
下面本文将对其中一些算法进行介绍并分析。
1 目前较为流行的影像融合算法分析1.1 小波变换法1.2 Brovey变换法Brovery变换(Brovery Transform,BT):是一种用来对来自不同传感器的数据进行融合的较为简单的融合方法,该方法将多光谱各波段进行归一化,然后将高分辨率全色影像与归一化后的各波段相乘得到融合后的影像。
遥感影像融合处理方法摘要:本文介绍了遥感影像数据融合技术,并给出了融合的一些基本理论、融合处理一般步骤以及常用融合处理方法,最后简要描述了融合评价的方式方法等。
关键词:遥感影像融合融合评价1、前言将高分辨率的全色遥感影像和低分辨率的多光谱遥感影像进行融合,获得色彩信息丰富且分辨率高的遥感融合影像的过程,成为遥感影像融合。
全色影像一般具有较高空间分辨率,多光谱影像光谱信息较丰富,为提高多光谱影像的空间分辨率,可以将全色影像融合进多光谱影像。
通过影像融合既可以提高多光谱影像空间分辨率,又能保留其多光谱特性。
2、遥感影像融合一般步骤遥感影像信息融合一般流程主要分为两个阶段:图像预处理,图像融合变换。
图像预处理主要包括:几何校正及影像配准。
几何校正主要在于去除透视收缩、阴影等地形因素以及卫星扰动、天气变化、大气散射等随机因素对成像结果一致性的影响;影像配准的目的在于消除由不同传感器得到的影像在拍摄角度、时相及分辨率等方面的差异。
3 常用融合方式3.1 IHS融合IHS(亮度I、色度H、饱和度S)变换就是将影像从RGB彩色空间变换到IHS空间来实现影像融合的一种方法。
由光学、热红外和雷达(微波)等方式得到的不同波段遥感数据,合成的RGB颜色空间是一个对物体颜色属性描述系统,而IHS色度空间提取出物体的亮度、色度、饱和度,它们分别对应每个波段的平均辐射强度、数据向量和的方向及其等量数据的大小。
RGB颜色空间和IHS 色度空间有着精确的转换关系。
IHS变换法只能用三个波段的多光谱影像融合和全色影像融合。
3.2 小波融合小波变换,基于遥感影像的频域分析进行的,由于同一地区不同类型的影像,低频部分差别不大,而高频部分相差很大,通过小波变换对变换区实现分频,在分频基础上进行遥感影像的融合,常用于雷达影像SAR与TM影像的融合。
3.3 Pansharping融合Pansharping算法用于高分辨率全色影像和多光谱影像的融合生成高分辨率彩色影像,此方法要求全波段影像和多波段影像同平台、同时间(或间隔很短)获得。
arcgis图像融合操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!以下是 ArcGIS 图像融合的一般操作流程:1. 数据准备确保你拥有要融合的图像数据,并将它们加载到 ArcGIS 中。
测绘技术中的遥感可见光影像处理流程讲解遥感可见光影像是测绘技术中常用的一种数据源,通过对遥感可见光影像进行处理,可以得到地表物体的空间分布信息。
本文将从遥感影像获取到处理流程进行讲解,为读者介绍遥感可见光影像处理的基本原理和方法。
一、遥感可见光影像获取遥感可见光影像获取是遥感技术的第一步,它利用遥感卫星或其他传感器获取地表物体的图像信息。
在遥感可见光影像中,不同地物会反射或发射出不同的可见光波段能量,通过接收和记录这些能量,得到遥感影像。
二、遥感可见光影像预处理在进行进一步的遥感可见光影像处理之前,需要对原始影像进行预处理工作。
预处理包括辐射校正、大气校正和几何校正等环节。
1. 辐射校正:辐射校正是将遥感影像的原始数据转换为辐射亮度数据的过程。
由于接收器特性不同,遥感影像在记录过程中会受到仪器响应和大气散射等因素的影响,因此需要进行辐射校正来消除这些干扰因素。
2. 大气校正:大气校正是根据大气传输模型消除大气散射对遥感影像的影响。
大气散射会导致影像中出现雾化现象或者颜色变暗等问题,通过大气校正可以获得更真实的地表物体光谱信息。
3. 几何校正:几何校正是指将遥感影像转换为地理坐标系下的数据。
遥感影像记录时可能会存在扭曲或者偏差,在几何校正过程中,需要通过内参数和外参数的计算来对遥感影像进行校正,使其能够与地理坐标系对应。
三、遥感可见光影像分类与分析遥感可见光影像分类和分析是遥感技术中的关键环节,其目的是对影像中不同地物进行精确的识别和分类。
1. 影像分类:影像分类是将影像中的像元按照其所属地物类型划分的过程。
遥感可见光影像中的像元通常由坐标、亮度和光谱等信息描述,通过像元的亮度和光谱信息可以对地物进行分类,常用的分类方法包括基于阈值、基于统计学和基于机器学习等方法。
2. 图像分割:图像分割是将遥感影像中的各个地物分割成不同的区域或对象的过程,其目的是得到更精细的地物边界和形状信息。
图像分割方法主要有基于阈值、基于区域和基于轮廓等方法。
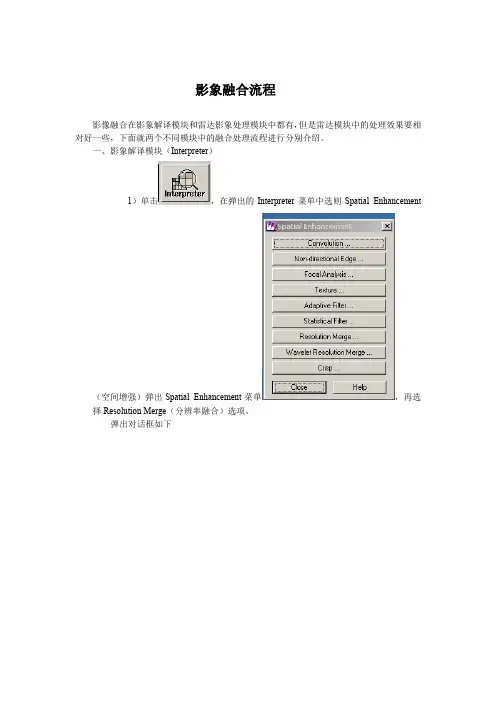
影象融合流程影像融合在影象解译模块和雷达影象处理模块中都有,但是雷达模块中的处理效果要相对好一些,下面就两个不同模块中的融合处理流程进行分别介绍。
一、影象解译模块(Interpreter)1)单击,在弹出的Interpreter菜单中选则Spatial Enhancement(空间增强)弹出Spatial Enhancement菜单,再选择Resolution Merge(分辨率融合)选项。
弹出对话框如下在Resolution Merge对话框中需要设置下列参数(1)确定高分辨率输入文件(high Resolution input file);(2)选择影象波段;(3)确定多光谱输入文件(multispectral input file);(4)定义输出文件;(5)选择融合方法。
在分辨率变换中,erdas提供了三种融合方法Principal Component(主成分变换法)、Multipalcative(乘积变换)、Brovey transform(比值变换)。
其图象分别如下:Principal Component(主成分变换法)Multipalcative(乘积变换)Brovey transform(比值变换)(6)选择重采样方法。
系统提供了两种重采样方法Nearest Neighbor(邻近像元法)、Bilinbear Interpolation(二次线形内插)和Cubic Convolution(立方卷积)。
其中以Cubic Convolution方法最为平滑。
(7)确定Output Options输出图象选项。
选择Lgnore Zero Stats,可以忽略像素值为0的像素;(8)确定Layer Selection(输出图象波段组合);(9)确定Data Type(输出数据类型);(10)击OK按钮执行操作。
2)在Spatial Enhancement菜单中选择wavelet Resolution Merge(小波融合),弹出对话框如下:在wavelet Resolution Merge对话框中我们要设置参数:(1)确定高分辨率输入文件(high Resolution input file);(2)选择影象波段;(3)确定多光谱输入文件(multispectral input file);(4)定义输出文件;(5)选择融合方法在小波融合中,erdas提供了三种融合方法Principal Component(主成分变换法)、ISH(色彩变换)、Single Band(单波段变换)。
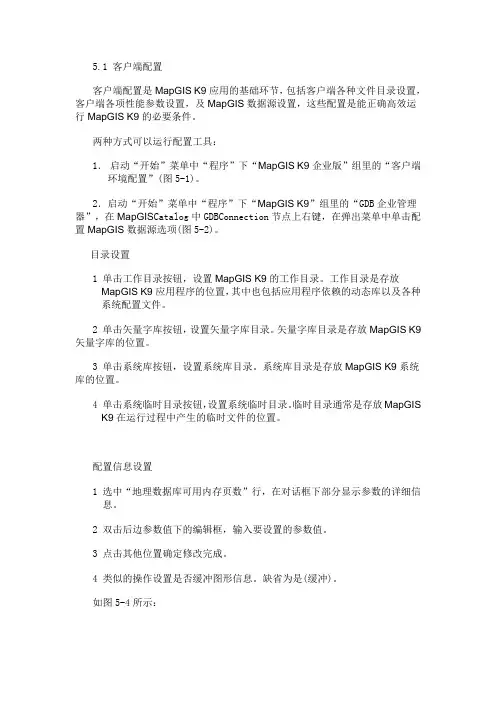
5.1 客户端配置客户端配置是MapGIS K9应用的基础环节,包括客户端各种文件目录设置,客户端各项性能参数设置,及MapGIS数据源设置,这些配置是能正确高效运行MapGIS K9的必要条件。
两种方式可以运行配置工具:1.启动“开始”菜单中“程序”下“MapGIS K9企业版”组里的“客户端环境配置”(图5-1)。
2.启动“开始”菜单中“程序”下“MapGIS K9”组里的“GDB企业管理器”,在MapGIS Catalog中GDBConnection节点上右键,在弹出菜单中单击配置MapGIS数据源选项(图5-2)。
目录设置1 单击工作目录按钮,设置MapGIS K9的工作目录。
工作目录是存放MapGIS K9应用程序的位置,其中也包括应用程序依赖的动态库以及各种系统配置文件。
2 单击矢量字库按钮,设置矢量字库目录。
矢量字库目录是存放MapGIS K9矢量字库的位置。
3 单击系统库按钮,设置系统库目录。
系统库目录是存放MapGIS K9系统库的位置。
4 单击系统临时目录按钮,设置系统临时目录。
临时目录通常是存放MapGISK9在运行过程中产生的临时文件的位置。
配置信息设置1 选中“地理数据库可用内存页数”行,在对话框下部分显示参数的详细信息。
2 双击后边参数值下的编辑框,输入要设置的参数值。
3 点击其他位置确定修改完成。
4 类似的操作设置是否缓冲图形信息。
缺省为是(缓冲)。
如图5-4所示:.本地数据源MapGISLocal是系统固定数据源,用于和基于文件的本地地理数据库建立连接,该数据源不可更改或删除。
2.点击添加可以添加MapGIS数据源(如图5-5),如ODBC数据源、Web Service数据源、Windows服务数据源、Oracle数据源、Sql Server数据源等。
下面以创建Oracle数据源为例,简单说明添加Oracle数据源的过程。
如何添加Oracle网络服务名的详细过程参见《企业管理器》一章的“地理数据库管理”相关内容。
测绘技术多视角影像融合处理流程随着科技的快速发展,测绘技术也在不断地进步。
其中,多视角影像融合处理流程成为了当前测绘技术中的一个热门研究方向。
本文将从多个角度来探讨这一领域的相关内容。
一、影像融合的概念和意义影像融合是指通过将来自不同角度、不同频段或不同传感器的影像进行融合处理,以获得更为全面、准确的信息。
它的意义在于提高地物识别和信息提取的精度,为测绘工作提供更全面的数据支持。
二、多视角影像融合处理流程的基本步骤多视角影像融合的处理流程可以分为四个基本步骤:数据预处理、特征提取、融合算法和结果评价。
1. 数据预处理数据预处理是为了提高影像融合的质量和效果。
这一步骤包括对原始影像的校正、配准和去噪处理等。
通过校正和配准,可以将来自不同视角的影像进行统一的坐标和姿态变换,从而更好地进行后续处理。
2. 特征提取特征提取是影像融合中的关键环节。
通过提取来自不同传感器或不同频段的影像特征,可以得到具有互补性和一致性的特征数据。
这些特征数据可以用于后续的融合算法。
3. 融合算法融合算法是多视角影像融合处理的核心部分。
目前,常用的融合算法主要有基于像素的融合算法和基于目标的融合算法。
前者通过对来自不同视角的像素进行加权平均或像素级别的操作,得到融合后的影像;后者则通过对目标进行识别、分割和目标级别的操作,从而实现影像融合。
4. 结果评价结果评价是判断影像融合效果的关键。
常用的评价指标包括空间分辨率、光谱信息保持度、目标检测和识别能力等。
通过对融合结果进行评价,可以调整和改进影像融合算法,提高融合效果的准确性和可靠性。
三、不同影像融合算法的特点和应用多视角影像融合处理流程中的融合算法有很多种类,常见的有小波变换、主成分分析、拉普拉斯金字塔等。
这些算法各具特点,适用于不同的应用场景。
1. 小波变换小波变换是一种时频分析方法,具有多尺度分析和局部特征表达的优势。
在影像融合中,小波变换可以通过对不同频带的影像进行融合,得到更详细和准确的融合结果。

高分二号影像处理流程我跟你说啊,这高分二号影像处理流程啊,就像一场神秘的旅程。
我第一次接触的时候啊,那真是两眼一抹黑,就瞅着那些影像数据,像是瞅着一堆外星符号。
咱先得拿到那些影像资料,这就像是在一个大仓库里找东西。
那些数据啊,在电脑屏幕上闪啊闪的,就像一群调皮的小萤火虫,密密麻麻的。
我就坐在那电脑前,眼睛瞪得老大,脸上满是紧张和好奇,嘴里还嘟囔着:“这可咋整呢?”拿到数据后啊,第一步就得进行预处理。
这就像是给一个刚从泥地里跑出来的小孩洗澡一样。
要去除那些噪声,就像把小孩身上沾的泥巴给搓掉。
那些噪声在影像里啊,就像是一些小黑点,乱哄哄的,看着就心烦。
我就对着电脑,一边操作一边皱着眉头说:“你们这些小黑点,可别捣乱了。
”然后就是辐射定标,这一步可关键了。
我得让那些影像的亮度值准确起来,就像给一幅画调整颜色一样。
我得仔细盯着那些数值的变化,眼睛都不敢眨一下,生怕弄错了。
这时候啊,旁边的同事还跟我打趣说:“你这眼睛都快贴到屏幕上啦,能看出花来啊?”我就回他:“你懂啥,这可不能有一点差错。
”再接着就是几何校正了。
这就好比把一张皱巴巴的纸给铺平。
那些影像里的地物啊,形状都有点歪歪扭扭的,看起来可别扭了。
我就得把它们调整得规规矩矩的,像个听话的小学生一样站好队。
我在那调整的时候啊,手都有点发抖,心里想着:“这要是弄错了,后面可就全乱套了。
”大气校正也不能少。
这就像是给影像揭开一层雾蒙蒙的纱。
大气对影像的影响可大了,要是不校正啊,那影像看起来就像隔着一层毛玻璃。
我就一点一点地调整那些参数,大气就像一个调皮的小怪兽,我得跟它斗智斗勇,把它的影响给消除掉。
最后就是图像融合了。
这就像是把不同风格的音乐融合成一首动听的曲子。
我要把那些不同分辨率的影像融合到一起,让它们变成一个完美的整体。
这时候我可高兴了,脸上露出了得意的笑容,心里想着:“嘿,这可算是有点模样了。
”这高分二号影像处理流程啊,每一步都不容易,就像走在一条布满荆棘的小路上,但最后看到处理好的影像,又觉得一切都值了。
测绘技术中的卫星影像拼接步骤解析近年来,随着卫星遥感技术的飞速发展,卫星影像拼接在测绘领域中发挥着重要的作用。
卫星影像拼接是指将不同位置、不同角度的卫星影像融合成一幅完整的影像,以获取更大范围、更高分辨率的信息。
本文将依次解析卫星影像拼接的步骤。
第一步,影像预处理。
卫星影像通常会受到大气、地表反射和传感器等因素的影响,因此需要进行预处理。
首先,对影像进行辐射校正,校正大气影响,以消除大气散射和吸收;其次,进行几何校正,校正地面形变和传感器不良;最后,进行边缘增强和噪声消除等处理,以提高影像质量。
第二步,图像配准。
由于卫星影像的拍摄位置和角度不同,需要将它们进行配准,使它们能够准确对应到同一坐标系统中。
一般而言,图像配准包括特征提取、特征匹配和几何变换三个主要步骤。
特征提取是指从影像中提取出独特的特征点或特征区域,例如边缘、角点等;特征匹配是指将不同影像中的相同特征点进行匹配,以确定它们的对应关系;几何变换是指根据特征匹配的结果,对影像进行旋转、平移、缩放或者畸变校正等操作,使其能够准确对齐。
第三步,图像融合。
在配准完成后,需要将配准后的影像进行融合,以获取完整的景观信息。
图像融合通常分为像素级融合和特征级融合两种方式。
像素级融合是指将多幅影像的像素值进行加权平均,以得到合成影像;特征级融合是指提取多幅影像的特征,如纹理、形状等,再进行融合。
不同的融合方式适用于不同的应用场景,合理选择融合方式可以提高测绘结果的精度和可视化效果。
第四步,质量评估。
影像拼接完成后,需要对拼接结果进行质量评估,以确定拼接的准确性和可靠性。
主要的质量评估指标包括配准精度、融合效果和地物提取精度等。
配准精度是指拼接结果与真实地面控制点之间的偏差;融合效果是指拼接后的影像是否出现边界模糊、锯齿等问题;地物提取精度是指拼接结果在地物边界提取等任务中的准确性。
通过质量评估,可以及时发现并纠正拼接过程中的问题,提高拼接的精度和可信度。
第1篇一、实验目的1. 了解影像融合的基本原理和意义。
2. 掌握影像融合的基本方法,如Brovey变换、PCA变换等。
3. 学会使用ENVI软件进行影像融合操作。
4. 分析不同融合方法对影像质量的影响。
二、实验原理影像融合是将不同来源、不同时相、不同光谱分辨率或不同波段的遥感影像进行综合处理,以获得更全面、准确、可靠的区域信息。
影像融合的方法主要分为像素级融合、特征级融合和决策级融合。
像素级融合是指对原始影像的像素值进行融合,常用的方法有Brovey变换、PCA变换、Gram-Schmidt变换等。
特征级融合是指对预处理和特征提取后获得的景物信息进行融合,常用的方法有边缘融合、纹理融合等。
决策级融合是指对融合后的影像进行决策,如分类、识别等。
三、实验方法1. 选择实验数据:选择两幅具有相同覆盖区域的遥感影像,一幅为多光谱影像,另一幅为全色影像。
2. 图像预处理:对两幅影像进行预处理,包括几何校正、辐射校正、大气校正等。
3. 影像融合:使用ENVI软件进行影像融合操作,选择不同的融合方法进行实验。
(1)Brovey变换融合:将多光谱影像的三个波段分别与全色影像进行线性组合,得到融合后的影像。
(2)PCA变换融合:对多光谱影像进行主成分分析,将特征向量与全色影像进行线性组合,得到融合后的影像。
4. 结果分析:比较不同融合方法得到的融合影像,分析其质量、视觉效果和实用性。
四、实验结果与分析1. Brovey变换融合结果:Brovey变换融合后的影像具有较高的空间分辨率和光谱信息,视觉效果较好。
但融合后的影像存在光谱失真现象,部分地物信息丢失。
2. PCA变换融合结果:PCA变换融合后的影像保留了原始影像的大部分信息,但融合后的影像分辨率较低,视觉效果较差。
3. 结果比较:Brovey变换融合方法在保持空间分辨率的同时,较好地保留了光谱信息,视觉效果较好。
PCA变换融合方法在保留大部分信息的同时,降低了影像分辨率,视觉效果较差。
第1篇一、实验背景随着遥感技术的发展,遥感影像在资源调查、环境监测、城市规划等领域发挥着越来越重要的作用。
然而,由于遥感传感器类型、观测时间、观测角度等因素的限制,同一地区获取的遥感影像往往存在光谱、空间分辨率不一致等问题。
为了充分利用这些多源遥感影像数据,提高遥感信息提取的准确性和可靠性,遥感影像融合技术应运而生。
遥感影像融合是将不同传感器、不同时间、不同分辨率的多源遥感影像进行综合处理,以获得对该区域更为准确、全面、可靠的影像描述。
本文通过实验验证了遥感影像融合技术在提高遥感信息提取准确性和可靠性方面的作用。
二、实验目的1. 了解遥感影像融合的基本原理和方法;2. 掌握常用遥感影像融合算法;3. 通过实验验证遥感影像融合技术在提高遥感信息提取准确性和可靠性方面的作用。
三、实验原理遥感影像融合的基本原理是将多源遥感影像数据进行配准、转换和融合,以获得具有更高空间分辨率、更丰富光谱信息的融合影像。
具体步骤如下:1. 影像配准:将不同源遥感影像进行空间配准,使其在同一坐标系下;2. 影像转换:将不同传感器、不同时间、不同分辨率的遥感影像转换为同一分辨率、同一波段的影像;3. 影像融合:采用一定的融合算法,将转换后的多源遥感影像数据进行融合,生成具有更高空间分辨率、更丰富光谱信息的融合影像。
四、实验方法1. 实验数据:选取我国某地区的高分辨率多光谱遥感影像和全色遥感影像作为实验数据;2. 融合算法:选用Brovey变换、主成分分析(PCA)和归一化植被指数(NDVI)三种常用遥感影像融合算法进行实验;3. 融合效果评价:采用对比分析、相关系数、信息熵等指标对融合效果进行评价。
五、实验步骤1. 数据预处理:对实验数据进行辐射校正、大气校正等预处理;2. 影像配准:采用双线性插值法对多光谱影像和全色影像进行配准;3. 影像转换:对多光谱影像进行波段合成,得到与全色影像相同分辨率的影像;4. 影像融合:分别采用Brovey变换、PCA和NDVI三种算法对转换后的多源遥感影像数据进行融合;5. 融合效果评价:对比分析三种融合算法的融合效果,并采用相关系数、信息熵等指标进行定量评价。
高分一号影像融合的简单流程
一、主要流程:
●多光谱(PMS)→辐射定标→大气校正→正射校正→①
●全色波段(PAN)→辐射定标→正射校正→①
●①→图像融合→图像裁剪(裁剪时,比预选的区域要大)→
图像镶嵌(合并)
具体步骤详见:/s/blog_764b1e9d0102vvwn.html 注):整个操作需要在ENVI5.2软件下进行,低于ENVI5.2版本的软件,处理过程时间较长,较为麻烦。
推荐使用ENVI5.2(我有,可分享)。
二、必要的补充:
●图像裁剪,可参见:
/s/blog_764b1e9d0102v1pe.html 注):有的区域,需要两幅以及两幅以上的影像用于拼接,
裁剪后,处理的速度会更快。
当然,如果计算机的配置比较
高,可以先拼接,拼接后在裁剪,视情况而定。
●图像镶嵌,采用的是Seamless Mosaic(无缝镶嵌),可参见:
/s/blog_764b1e9d0101cbf0.html。
影像融合流程
影像融合在影象解译模块和雷达影象处理模块中都有,但是雷达模块中的处理效果要相对好一些,下面就两个不同模块中的融合处理流程进行分别介绍。
一、影象解译模块(Interpreter)
1)单击,在弹出的Interpreter菜单中选则Spatial Enhancement(空间增强)弹出Spatial Enhancement菜单,再选择Resolution Merge(分辨率融合)选项。
弹出对话框如下
在Resolution Merge对话框中需要设置下列参数
(1)确定高分辨率输入文件(high Resolution input file);
(2)选择影象波段;
(3)确定多光谱输入文件(multispectral input file);
(4)定义输出文件;
(5)选择融合方法。
在分辨率变换中,erdas提供了三种融合方法Principal Component(主成分变换法)、Multipalcative(乘积变换)、Brovey transform(比值变换)。
其图象分别如下:
Principal Component(主成分变换法)
Multipalcative(乘积变换)
Brovey transform(比值变换)
(6)选择重采样方法。
系统提供了两种重采样方法Nearest Neighbor(邻近像元法)、Bilinbear Interpolation(二次线形内插)和Cubic Convolution(立方卷积)。
其中以Cubic Convolution方法最为平滑。
(7)确定Output Options输出图象选项。
选择Lgnore Zero Stats,可以忽略像素值为0的像素;
(8)确定Layer Selection(输出图象波段组合);
(9)确定Data Type(输出数据类型);
(10)击OK按钮执行操作。
2)在Spatial Enhancement菜单中选择wavelet Resolution Merge(小波融合),弹出对话框如下:
在wavelet Resolution Merge对话框中我们要设置参数:
(1)确定高分辨率输入文件(high Resolution input file);
(2)选择影象波段;
(3)确定多光谱输入文件(multispectral input file);
(4)定义输出文件;
(5)选择融合方法在小波融合中,erdas提供了三种融合方法Principal Component(主成分变换法)、ISH(色彩变换)、Single Band(单波段变换)。
其图象分别如下:
Single Band(单波段变换)
ISH(色彩变换)
Principal Component(主成分变换法)
(6)选择重采样方法。
系统提供了两种重采样方法Nearest Neighbor(邻近像元法)和Bilinbear Interpolation(二次线形内插)。
(7)如果选择ISH融合方法,则还需要确定ISH替换波段的成分。
(8)确定Layer Selection(输出图象波段组合);
(9)确定Data Type(输出数据类型);
(10)确定Output Options输出图象选项。
选择Lgnore Zero Stats,可以忽略像素值为0的像素。
(11)确定输出影象波段组合。
(12)单击OK,关闭对话框。
二、雷达模块
在ERDAS图标面版工具条中,单击Radar/Radar Interpreter/Image Enhancement/Sensor merge命令,打开Sensor Merge对话框如下:
在Sensor Merge对话框中,需要设置如下参数;
(1)确定输入的Gray Scale Image(灰阶影象);
(2)选择影象波段;
(3)确定多光谱输入文件(multispectral input file);
(4)定义输出文件;
(5)选择融合方法。
我们可以看到共有三种融合方法Principal Component(主成分变换法)、ISH(色彩变换)、Multiplycation(乘积变换);
(6)选择重采样方法。
系统提供了三种重采样方法Nearest Neighbor(邻近像元法)、Bilinbear Interpolation(二次线形内插)和Cubic Convolution(立方卷积)。
其中以Cubic Convolution方法最为平滑。
(7)选择不同的融合方法有不同的操作步骤,分别如下:
A主成分变换
应用主成分变换技术,可以有四种选择来改变图象的灰阶:
·Resampe:按第一主成分(PC-1)来重新划分图象的灰阶。
·Hist.Match:将灰阶图象与第一主成分(PC-1)进行直方图匹配。
·Multiply:将灰阶图象划分为0~1的取值范围,与第一主成分(PC-1)的乘法运算。
·None:以输入的灰阶图象来代替第一主成分。
B色彩变换
应用色彩变换时,有两种选择
·Intensity:将输入灰阶图象重新定阶到I(Intensity-亮度)的任意数值范围,然后代替I。
·Saturation:将输入灰阶图象重新定阶到S(Saturation-饱和度)的任意数值范围,然后代替S。
C乘积变换
(8)确定Data Type(输出数据类型);
(9)确定Layer Selection(输出图象波段组合);
(10)确定Output Options输出图象选项。
选择Lgnore Zero Stats,可以忽略像素值为0的像素。
(11)单击OK按钮执行操作。
三、例子
(一)、分辨率融合
(二)、传感器融合
Sensor merge对话框对于第一种方法也可以用这种方法来检查。