桥式起重机PLC控制改造设计
- 格式:doc
- 大小:1.46 MB
- 文档页数:57
桥式起重机PLC控制改造设计摘要传统桥式起重机主要由交流凸轮控制器进行控制,其通常采用绕线式电动机转子串电阻调速,交流控制器在频繁的动作和高压影响下会经常出现触电烧损,同时,电阻箱在长时间的工作环境下很容易出现腐蚀老化等现象,给工作带来许多负面影响。
桥式起重机是厂矿、仓库等部门常用的起重设备,在工业生产过程中起重举足轻重的作用。
随着工业自动化的发展,PLC、变频器工厂设备中的应用越来越广泛。
由于PLC的工作可靠性高,因此用PLC来代替传统的交流控制器已成为一种必然趋势。
关键词桥式起重机;PLC;改造1 桥式起重机PLC改造的意义桥式起重机是一种用于起吊和放下重物并使重物在短距离内水平移动的起重设备。
起重设备的形式多种多样,在不同的生产环境下,使用的设备形式不同,比如桥式、塔式、门式、缆索式等。
本文所要描述的起重机为桥式起重机,桥式起重机根据其形式还可以区分类别,比如单主梁桥式起重机和双梁桥式起重机等,也可根据其吊具的不同分为吊钩、抓钩、电磁等,当然还有许多种类。
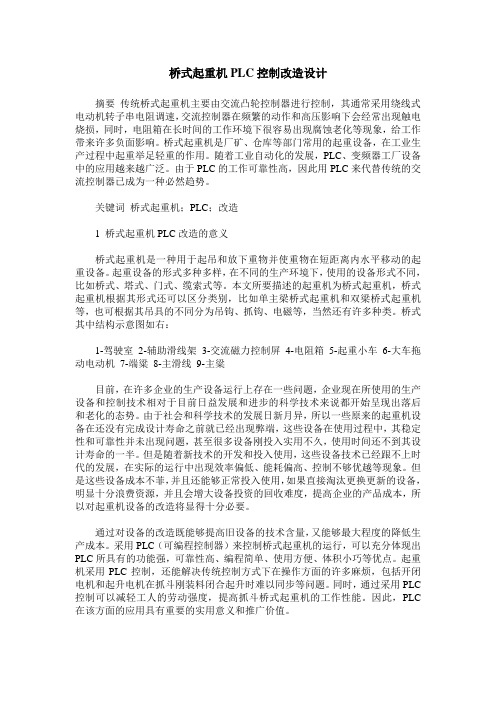
桥式其中结构示意图如右:1-驾驶室2-辅助滑线架3-交流磁力控制屏4-电阻箱5-起重小车6-大车拖动电动机7-端粱8-主滑线9-主粱目前,在许多企业的生产设备运行上存在一些问题,企业现在所使用的生产设备和控制技术相对于目前日益发展和进步的科学技术来说都开始呈现出落后和老化的态势。
由于社会和科学技术的发展日新月异,所以一些原来的起重机设备在还没有完成设计寿命之前就已经出现弊端,这些设备在使用过程中,其稳定性和可靠性并未出现问题,甚至很多设备刚投入实用不久,使用时间还不到其设计寿命的一半。
但是随着新技术的开发和投入使用,这些设备技术已经跟不上时代的发展,在实际的运行中出现效率偏低、能耗偏高、控制不够优越等现象。
但是这些设备成本不菲,并且还能够正常投入使用,如果直接淘汰更换更新的设备,明显十分浪费资源,并且会增大设备投资的回收难度,提高企业的产品成本,所以对起重机设备的改造将显得十分必要。

桥式起重机俗称行车,是工矿企业应用非常广泛的起重机械。
传统的桥式起重机为了提高起动转矩,采用绕线式异步电动机拖动,通过鼓形凸轮控制器的操作来改变其转子所串电阻调速。
随着新技术和控制设备的发展,现在人们普遍采用变频器作为变频调速电源,用笼形异步电动机取代原来的绕线异步电动机,用PLC作为控制装置进行无触点控制。
从而改善了调速性能,增加了系统的可靠性。
本文通过一个实例分析变频器和PLC在系统中的具体应用。
1、桥式起重机拖动系统1.1 桥式起重机的运行机构1)大车拖动系统拖动整台起重机顺着车间方向左右移动(以司机的坐向为参考)2)小车拖动系统拖动吊钩及重物顺着桥架作前后运动。
3)吊钩拖动系统拖动重物作吊起或放下的上下运动。
大型起重机(超过10t)有两个起升机构:主起升机构(主钩)和副起升机构(副钩)。
通常主钩与副钩不能同时起吊重物。
1.2 负荷特点桥式起重机的拖动系统负载都属于恒转矩性质,且其起升机构为位能性负载,当起升机构起吊重物下降或者快速减速运行时,电动机处于再生发电制动状态。
需要将电能通过反馈装置反送给电网或消耗在制动电阻上,以防直流处的泵升电压影响制动效果。
1.3 控制要求1)起升机构要求起动转矩大,起动运行平稳。
能够实现正反转运行且要有超载、限位、限流等多种保护。
2)起升机构在启停过程中易出现“溜钩”问题。
由于制动器从抱紧到松开,以及从松开到抱紧的动作过程需要时间(约0.65),而电动机转矩的产生或消失,是在通电或断电瞬间就立刻反应的。
因此,制动器和电动机在动作的配合上极易出现问题。
如电动机已经通电,而制动器尚未松开,将导致电动机的严重过载;反之,如电动机已经断电,而制动器尚未抱紧,则重物必将下滑,即出现溜钩现象。
因此要有相应的防止措施。
起升机构中要有机械制动器。
起重用变频器具有零速全转矩功能(又称零伺服功能,即零速时电动机仍能输出150%的额定转矩,使重物停在空中),但是若重物停在空中时出现电源瞬间停电等情况,就会有重物下滑的危险。

PLC和变频器桥式起重机控制系统设计毕业设计毕业设计题目:PLC和变频器桥式起重机控制系统设计摘要:本文以桥式起重机为研究对象,通过PLC和变频器控制系统设计,实现对桥式起重机的自动化控制。
首先,对桥式起重机的工作原理和结构进行了详细介绍;然后,分析了PLC和变频器在桥式起重机控制系统中的优势和应用;最后,进行了PLC和变频器桥式起重机控制系统设计。
关键词:桥式起重机;PLC;变频器;控制系统;自动化一、引言桥式起重机是一种非常常见的起重设备,广泛应用于工厂、码头、港口等场所。
它具有运载能力强、工作灵活、结构稳定等特点。
目前,为了提高桥式起重机的操作效率和安全性,许多企业将自动化控制引入到桥式起重机中。
二、桥式起重机的工作原理和结构桥式起重机一般由桥架、行车和起重机构等组成。
工作时,起重机电机通过驱动机构提供动力。
起重机构由卷筒、悬挂系统和钩组成。
具体工作原理和结构可参考相关教材。
三、PLC和变频器在桥式起重机控制系统中的应用PLC和变频器作为现代自动化控制的重要组成部分,广泛应用于桥式起重机控制系统中。
PLC主要负责控制逻辑的实现,如控制起升、小车前后移动、大车左右移动等操作;变频器则用于控制电机的转速,实现对起重机各部分的精确控制和调速。
四、PLC和变频器桥式起重机控制系统设计1.系统硬件设计根据桥式起重机的实际需求和控制要求,选择合适的PLC和变频器设备,并搭建起相应的控制系统硬件平台。
2.系统软件设计利用PLC编程软件进行控制逻辑的设计和实现,包括起升、小车前后移动、大车左右移动等操作的代码编写。
同时,利用变频器的调试软件,设置合适的参数,实现电机的精确调速。
3.系统测试和调试将设计好的控制系统连接到实际的桥式起重机上,进行系统的测试和调试。
通过不断调整参数,检查系统运行状态,确保系统性能满足要求。
五、总结通过本文的研究,我们成功设计出了基于PLC和变频器的桥式起重机控制系统。
该控制系统具有自动化程度高、操作灵活、性能稳定等优点,可以提高桥式起重机的工作效率和安全性。

采用PLC技术改造抓斗桥式起重机1. 前言:炼铁厂供料车间抓斗桥式起重机原控制电路采用71-时间继电器平衡切除电阻,实际使用中JT3型直流时间继电器每月常常损坏4-5个这是因为一合上控制电源开关,1个时间继电器就全部处于通电状态,设计不甚合理;其次抓斗装卸作业高节奏使得时间继电器频繁动作,其线圈有1万多匝,线径小于 0.2mm2,消耗功率约16W,正常工作时发热比较严重,导致绝缘老化,每次线圈得、失电瞬间又会产生很大的反电动势,极易击穿绝缘损坏线圈,特别是工作现场环境差、煤粉尘多、震动大、电化腐蚀严重等加剧了时间继电器的损坏.2. PLC简介:可编程控制器(Programmable controller)是计算机家族中的一员,是为工业控制应用而设计制造的。
早期的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller),简称PLC,它主要用来代替继电器实现逻辑控制。
随着技术的发展,这种装置的功能已大大超过了逻辑的控制范围,因此,今天这种装置称作可编程控制器,简称PC,但是为了避免与个人计算机相混淆,所以,将可编程控制器简称 PLC。
PLC是在传统的顺序控制器的基础上引入了微电子技术、计算机技术、自动控制技术和通讯技术而形成的一代新型工业控制装置,目的是用来取代继电器、执行逻辑、记时、计数等顺序控制功能,建立柔性的程控系统。
国际电工委员会(IEC)颁布了对PLC的规定:可编程控制器是一种数字操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存贮器,用来在其内部存贮执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或生产过程。
可编程控制器及其有关设备,都应按易于与工业控制系统形成一个整体,易于扩充其功能的原则设计。
PLC 具有通用性强、使用方便、适应面广、可靠性高、抗干扰能力强、编程简单等特点。

毕业设计(论文)答辩委员会毕业设计(论文)成绩评定书专业班级:06机电一体化姓名:董艳军毕业设计(论文)课题:桥式起重机PLC控制改造设计经毕业设计(论文)答辩,评定该同学的毕业设计(论文)成绩为毕业设计(论文)答辩委员会主任:副主任:年月日毕业设计(论文)任务书根据机电一体化专业教学计划安排,董艳军同学毕业设计(论文)任务如下:1、毕业设计(论文)课题:桥式起重机PLC控制改造设计2、原始资料:桥式起重机电路原理图3张,起重机电气元件表一个,该起重机的起升机构采用主令控制器控制,大车、小车行走机构采用凸轮控制器控制,该起重机过载保护采用过流继电器,各方向均设有行程限位开关。
整个起重机控制系统共有4台电动机。
3、设计要求:把上述起重机的继电-接触器控制系统改造成PLC控制,完成控制系统图绘制和PLC接线图的设计,主要完成PLC的选型设计和地址分配。
4、设计时间:自9 月23 日至12 月26 日指导教师:成教处主任:年月日指导人评语:成绩:年月日评阅人评语:成绩:年月日目录第1章绪论 (1)1.1 电气控制技术的发展 (1)1.2 对铣床控制电路进行PLC改造的意义 (1)1.3 本设计的主要内容 (2)第2章桥式起重机控制电路的原理分析 (3)2. .1 桥式起重机简价 (3)2. 2 起重机电动机的工作状态分析 (5)2. 3 起重机控制原理分析 (7)第3章起重机PLC控制系统的设计 (16)3. 1 可编程序控制器的功能重操特点 (16)3. 2 PLC控制系统的设计基本原则与主要内容 (18)3. 3 PLC硬件的选择 (19)3. 4 减小所需I/0点数的方法 (22)3. 5 PLC的造型设计 (25)第4章桥式起重机PLC控制系统的程序设计 (34)4.1 PLC控制程序设计的一般步骤 (34)4 2 桥式起重机控制程序的设计 (35)第5章桥式起重机PLC控制系统的检修 (42)5.1 桥式起重机常见故障及可能原因 (42)5.2 桥式起重机常见故障的检查 (42)5.3 20T桥式起重机电气控制线路的常见故障的检修 (43)参考文献 (46)结束语 (47)第1章绪论1.1 电气控制技术的发展19世纪末,电动机逐渐代替了蒸气机,出现了电力拖动。

畢業設計(論文)答辯委員會畢業設計(論文)成績評定書專業班級:08電氣自動化姓名:畢業設計(論文)課題:橋式起重機PLC控制改造設計經畢業設計(論文)答辯,評定該同學的畢業設計(論文)成績為畢業設計(論文)答辯委員會主任:副主任:年月日畢業設計(論文)任務如下:1、畢業設計(論文)課題:橋式起重機PLC控制改造設計2、原始資料:橋式起重機電路原理圖3張,起重機電氣元件表一個,該起重機的主鉤採用主令控制器控制,副鉤、大車、小車行走機構採用凸輪控制器控制,該起重機超載保護採用過流繼電器,各方向均設有行程限位開關。
整個起重機控制系統共有5臺電動機。
3、設計要求:把上述起重機的繼電-接觸器控制系統改造成PLC 控制,完成控制系統圖繪製和PLC接線圖的設計,主要完成PLC的選型設計和地址分配。
4、設計時間:指導教師:教務處主任:年月日指導人評語:目錄第1章绪论 (1)1.1 过程控制技术的发展概述 (4)1.2 对起重机控制电路进行PLC改造的意义 (5)1.3本设计的主要内容 (6)第2章桥式起重机电气控制 (7)2.1 桥式起重机简介 (7)2.2桥式起重机对电力拖动和电气控制的要求 (9)2.3 起重机电动机的工作状态分析 (10)2.4 起重机控制原理分析 (12)第3章起重机PLC控制系统的设计 (23)3.1 可编程序控制器的功能和特点 (23)3.2 PLC控制系统的设计基本原则与主要内容 (24)3.3 PLC硬件的选择 (26)3.4 节省PLC输入输出点数的方法 (29)3.5 PLC的选型设计 (31)第4章桥式起重机PLC控制系统的程序设计 (42)4.1 PLC控制程序设计的一般步骤 (42)4.2 桥式起重机控制程序的设计 (43)第5章桥式起重机PLC控制系统的检修 (52)5.1 桥式起重机常见故障及可能原因 (52)5.2 20/5T桥式起重机电气控制线路的常见故障检修 (53)参考文献 (55)结束语..................................................................................................... 错误!未定义书签。
桥式起重机PLC控制改造设计(此文档为word格式,下载后你可任意修改编辑)目录第1章绪论 (1)1.1 过程控制技术的发展概述 (2)1.2 对起重机控制电路进行PLC改造的意义 (3)1.3本设计的主要内容 (4)第2章桥式起重机电气控制 (5)2.1 桥式起重机简介 (5)2.2桥式起重机对电力拖动和电气控制的要求 (7)2.3 起重机电动机的工作状态分析 (8)2.4 起重机控制原理分析 (10)第3章起重机PLC控制系统的设计 (21)3.1 可编程序控制器的功能和特点 (21)3.2 PLC控制系统的设计基本原则与主要内容 (22)3.3 PLC硬件的选择 (24)3.4 节省PLC输入输出点数的方法 (27)3.5 PLC的选型设计 (29)第4章桥式起重机PLC控制系统的程序设计 (39)4.1 PLC控制程序设计的一般步骤 (39)4.2 桥式起重机控制程序的设计 (40)第5章桥式起重机PLC控制系统的检修 (49)5.1 桥式起重机常见故障及可能原因 (49)5.2 20/5T桥式起重机电气控制线路的常见故障检修 (50)参考文献 (52)结束语..................................................................................................... 错误!未定义书签。
第1章绪论1.1 过程控制技术的发展概述在现代工业控制中, 过程控制技术是一历史较为久远的分支。
在本世纪30 年代就已有应用。
过程控制技术发展至今天, 在控制方式上经历了从人工控制到自动控制两个发展时期。
在自动控制时期内,过程控制系统又经历了三个发展阶段, 它们是:分散控制阶段, 集中控制阶段和集散控制阶段。
从过程控制采用的理论与技术手段来看,可以粗略地把它划为三个阶段:开始到70 年代为第一阶段,70 年代至90 年代初为第二阶段,90 年代初为第三阶段开始。
摘要桥式起重机是企业生产中用来搬运货物的重要设备。
在长期使用后,某厂15/ST桥式起重机频繁的出现故障,使工厂的正常生产受到了严重的影响。
在不改变桥式起重机运行机构的条件下,可使用交流变频调速器和可编程控制器,对该设备的起升系统进行电气控制技术改造,并设计了配套的技术改造方案,主钩电机调速选用FR-A540-45 W变频器;副钩电机调速选用FR-A540-1 SW 的变频器;并使用三菱FX2N-80MR作为起升系统的电气PLC控制器。
本文结合交流变频技术与PLC控制技术,根据工厂设备的要求,绘制了变频器的端口接线图,定义可编程控制器的输入和输出端口并绘制端口接线图。
设计了起升装置的PLC梯形图;编写了相应的PLC控制程序。
解决了设备在控制过程中存在的安全隐患,提高了控制精度。
关键词:桥式起重机起升装置改造交流变频调速可编程控制器AbstractBridge crane is one of the important equipment used to transport goods in enterprise production. After using for a long time, a factory 15/2T bridge crane frequent malfunction, have seriously affected normal production of the factory.Without changing under the condition of bridge crane operation mechanism, can use ac frequency conversion speed regulator and programmable controller, the equipment of the hoisting system of electrical control technology renovation, and design form a complete set of technical transformation scheme, main hook to choose FR - A540-45 W inverter motor speed; Vice hook to choose FR-A540-motor speed frequency converter; And the use of mitsubishi FX2N-80-MR lifting system of electrical PLC controller.Based on the ac frequency conversion technology and PLC control technology, according to the requirement of the factory equipment, made port wiring diagram of the inverter, definition of the programmable controller input and output ports and draw port wiring diagram. Design the PLC ladder diagram of lifting device; Write the corresponding PLC control program. To solve the hidden trouble in security equipment in the control process, improve the control precision.Keywords: bridge crane hoisting device transform ac frequency control of motor speed programmable controller目录摘要 (I)Abstract (II)1 绪论 (1)1.1 选题背景 (1)1.2 桥式起重机的组成 (1)1.3 桥式起重机电气控制系统 (1)1.4 桥式起重机电气设备及功能 (2)1.5 桥式起重机电气故障分析 (3)1.6 改造方案研究 (4)1.7 本章小结 (5)2 桥式起重机电气改造方案研究 (6)2.1 确定起重机升降机构的电气系统改造方案 (6)2.2 本改造方案的优点 (6)2.3 本章小结 (7)3 三相交流异步电机变频调速和PLC控制技术基础 (8)3.1 三相异步交流电动机变频调速的优点 (8)3.2 变频调速器 (9)3.3 PLC控制技术基础 (11)3.3.1 可编程序控制器概述 (11)3.3.2 PLC的性能指标 (11)3.3.3 可编程控制器的分类 (11)3.3.4 可编程控制器的基本运用 (12)3.3.5 可编程序控制器的特点 (13)3.3.6 可编程控制器的组成及原理 (14)3.2 编程语言 (15)3.3 可编程控制器的工作原理 (16)3.4 本章小结 (18)4 起重机的电气系统改造硬件选择 (19)4.1 起重机升降装置改造前主要参数 (19)4.2 主钩电机与副钩电机基于功率的定型 (19)4.3 主、副钩变频器选型 (20)4.4 可编程控制器的选型 (22)4.4.1 可编程控制器的输入输出点表统计 (22)4.4.2 电气控制PLC的选型确定 (24)4.5 本章小结 (24)5 起重机起升装置的电气控制系统的改造接线 (25)5.1 可编程控制器的输入输出点定义 (25)5.2 起升装置的改造接线 (26)5.3 电气控制PLC程序设计 (28)5.4 本章小结 (29)6 桥式起重机电气系统改造施工及调试 (30)6.1 起重机改造设备的采购及施工 (30)6.2 本章小结 (31)致谢 (33)参考文献 (34)1 绪论1.1 选题背景桥式起重机是企业生产中用来搬运货物的重要设备,它是可沿轨道运行的桥梁式结构起重机。
毕业设计plc控制桥式起重机PLC(可编程逻辑控制器)技术在工业自动化领域发挥着重要的作用,它具备可编程、易扩展、高可靠性等特点,被广泛应用于各种控制系统中。
在毕业设计中,我们选择了PLC控制桥式起重机作为研究对象,旨在通过PLC技术改进桥式起重机的控制系统,提高其性能和操作的安全性。
本文将对这一毕业设计的内容进行详细阐述,以供读者参考。
首先,我们将介绍桥式起重机的基本原理和结构。
桥式起重机是一种常用的起重设备,其具备在两端设置的大臂可自由移动的特点,可用于各种工业场所的货物搬运。
桥式起重机的主要组成部分包括:大臂、小臂、平台、滑轮组、电动机和控制系统等。
在起重过程中,控制系统起着至关重要的作用,它能够控制各个电动机的启停、速度调节以及起重机的方向等。
PLC控制桥式起重机的优势显而易见。
首先,PLC具备可编程的特点,可以根据实际需求编写程序,实现自动化控制。
其次,PLC系统易于扩展和维护,结构简单,可根据需求增加输入输出模块,提高系统的功能性。
另外,PLC还具有高可靠性和抗干扰能力,能够适应工业环境的特殊要求,确保起重机的操作安全。
在进行PLC控制桥式起重机的设计时,我们首先需要分析起重机系统的功能需求。
起重机的基本控制功能包括:起升、行走、旋转和变幅等。
我们需要编写PLC程序,实现对起重机各个部分电动机的控制,包括启停、正反转、速度调节等。
此外,我们还需考虑安全性因素,编写紧急停止、防撞、超载保护等程序,确保起重机操作的安全可靠。
在具体实施中,我们可以采用西门子、施耐德等知名PLC品牌的设备,结合相应的编程软件进行编写程序。
在编写程序时,需要考虑到桥式起重机的具体参数,如起升高度、最大载重量、行走速度等,并根据实际需求进行调整。
在程序编写完成后,需要进行严密的测试和调试,确保PLC控制桥式起重机能够完全满足设计要求。
总结起来,通过本次毕业设计,我们旨在通过PLC技术改进桥式起重机的控制系统,提高其性能和操作的安全性。
毕业设计(论文)答辩委员会
毕业设计(论文)成绩评定书
专业班级:07电气自动化姓名:
毕业设计(论文)课题:
桥式起重机PLC控制改造设计
经毕业设计(论文)答辩,评定该同学的毕业设计(论文)成绩为
毕业设计(论文)答辩委员会主任:
副主任:
年月日
毕业设计(论文)任务如下:
1、毕业设计(论文)课题:
桥式起重机PLC控制改造设计
2、原始资料:
桥式起重机电路原理图3张,起重机电气元件表一个,该起重机的主钩采用主令控制器控制,副钩、大车、小车行走机构采用凸轮控制器控制,该起重机过载保护采用过流继电器,各方向均设有行程限位开关。
整个起重机控制系统共有5台电动机。
3、设计要求:
把上述起重机的继电-接触器控制系统改造成PLC 控制,完成控制系统图绘制和PLC接线图的设计,主要完成PLC的选型设计和地址分配。
4、设计时间:
指导教师:教务处主任:
年月日
指导人评语:
成绩:
指导人:
年月日评阅人评语:
成绩:
评阅人:
年月日
目录
第1章绪论 (1)
1.1 过程控制技术的发展概述 (2)
1.2 对起重机控制电路进行PLC改造的意义 (3)
1.3本设计的主要内容 (4)
第2章桥式起重机电气控制 (5)
2.1 桥式起重机简介 (5)
2.2桥式起重机对电力拖动和电气控制的要求 (7)
2.3 起重机电动机的工作状态分析 (8)
2.4 起重机控制原理分析 (10)
第3章起重机PLC控制系统的设计 (21)
3.1 可编程序控制器的功能和特点 (21)
3.2 PLC控制系统的设计基本原则与主要内容 (22)
3.3 PLC硬件的选择 (24)
3.4 节省PLC输入输出点数的方法 (27)
3.5 PLC的选型设计 (29)
第4章桥式起重机PLC控制系统的程序设计 (39)
4.1 PLC控制程序设计的一般步骤 (39)
4.2 桥式起重机控制程序的设计 (40)
第5章桥式起重机PLC控制系统的检修 (49)
5.1 桥式起重机常见故障及可能原因 (49)
5.2 20/5T桥式起重机电气控制线路的常见故障检修 (50)
参考文献 (52)
结束语..................................................................................................... 错误!未定义书签。
第1章绪论
1.1 过程控制技术的发展概述
在现代工业控制中, 过程控制技术是一历史较为久远的分支。
在本世纪30 年代就已有应用。
过程控制技术发展至今天, 在控制方式上经历了从人工控制到自动控制两个发展时期。
在自动控制时期内,过程控制系统又经历了三个发展阶段, 它们是:分散控制阶段, 集中控制阶段和集散控制阶段。
从过程控制采用的理论与技术手段来看,可以粗略地把它划为三个阶段:开始到70 年代为第一阶段,70 年代至90 年代初为第二阶段,90 年代初为第三阶段开始。
其中70 年代既是古典控制应用发展的鼎盛时期,又是现代控制应用发展的初期,90 年代初既是现代控制应用发展的繁荣时期,又是高级控制发展的初期。
第一阶段是初级阶段,包括人工控制,以古典控制理论为主要基础,采用常规气动、液动和电动仪表,对生产过程中的温度、流量、压力和液位进行控制,在诸多控制系统中,以单回路结构、PID 策略为主,同时针对不同的对象与要求,创造了一些专门的控制系统,如:使物料按比例配制的比值控制,克服大滞后的Smith 预估器,克服干扰的前馈控制和串级控制等等,这阶段的主要任务是稳定系统,实现定值控制。
这与当时生产水平是相适应的。
第二阶段是发展阶段,以现代控制理论为主要基础,以微型计算机和高档仪表为工具,对较复杂的工业过程进行控制。
这阶段的建模理论、在线辨识和实时控制已突破前期的形式,继而涌现了大量的先进控制系统和高级控制策略,如克服对象特性时变和环境干扰等不确定影响的自适应控制,消除因模型失配而产生不良影响的预测控制等。
这阶段的主要任务是克服干扰和模型变化,满足复杂的工艺要求,提高控制质量。
1975 年,世界上第一台分散控制系统在美国Honeywe公司问世,从而揭开了过程控制崭新的一页。
分散控制系统也叫集散控制系统,它综合了计算机技术、控制技术、通信技术和显示技术,采用多层分级的结构形式,按总体分散、管理集中的原则,完成对工业过程的操作、监视、控制。
由于采用了分散的结构和冗余等技术,使系统的可靠性极高,再加上硬件方面的开放式框架和软件方面的模块化形式,。