温室微灌恒压组态轮灌自动控制系统
- 格式:pdf
- 大小:164.11 KB
- 文档页数:3

基于自动控制器控制的温室自动喷灌系统设计摘要介绍了1种实用的温室大棚微喷灌及自动控制系统。
该系统采用LOGO!为控制器,结合微喷灌系统一些实用性设计,给中小规模温室大棚基地提供一个实用可行的自动灌溉系统方案。
关键词温室大棚。
微喷灌。
自动控制系统。
LOGO!目前,微喷灌技术和智能控制技术在温室大棚中的应用越来越广。
微喷灌为节水灌溉主要形式,它具备灌水均匀、空气湿度低、病虫害少、节省劳力等优点,但也存在着投资大、灌水器易堵的缺点,这在很大程度上影响了这项技术的推广使用。
灌溉系统自动控制为温室大棚智能控制的一部分,其形式可分为基于定时器的自动控制和基于微机的智能控制。
前者投资少,但功能上只具备定时功能,缺少模拟量控制及逻辑控制功能。
后者功能齐全,但控制元件多,投资大,一般适用于规模较大的大棚基地。
某高校的园艺实训基地建有30m×8m温室大棚10栋。
其中8栋用于观叶植物栽培,因其叶面水分挥发量大,采用喷灌。
2栋用于蔬菜和花卉栽培,采用微喷灌。
根据实训基地教案与生产的要求,设计了自动灌溉系统,该系统也适合中小型温室大棚基地推广使用。
1 系统组成自动灌溉系统由水源、首部枢纽、输配水管网、灌水器4部分组成,系统结构见图1所示。
1.1 水源处理经实验,当地井水可用于植物和农作物的浇灌,因此,系统以井水为水源,采用深井泵汲水。
但井水温度太低,一般只有19~21℃,且水质太硬,含钙量高,容易结成水垢,堵塞灌水器,不能直接用于浇灌。
因此,先将井水抽取到沉淀池内进行曝气和沉淀,以提高水温及水的含氧量,沉淀泥沙及矿物质,降低水的硬度。
沉淀池的容量应根据温室规模及用水量确定,保证抽入的水有24h以上的曝气时间,才能用于浇灌。
沉淀池分为2个区,容量较大的区主要用于曝气与沉淀,容量较小的区用于汲水。
2个区下部用水泥墙隔开,上部装设金属过滤网,曝气后的井水水温上升,上浮至上部,经过滤网进入汲水区,用于灌溉。
沉淀池2个区底部均开有排污口,定期手动排污。

温室自动化控制系统设计与应用研究摘要:温室是一种通过人工手段改变温度、湿度、光照等环境条件以创造良好生长条件的建筑物,广泛应用于农业生产中。
随着科技的发展,温室自动化控制系统得到了不断的改进和应用,在提高农业生产效益、减少能源消耗等方面发挥着重要作用。
本文主要探讨了温室自动化控制系统的设计与应用,包括系统组成、功能要求、系统设计和实际应用等方面,旨在为温室自动化控制系统的研究和应用提供参考。
一、引言温室农业是解决世界农业发展面临的许多问题的重要途径之一,它能够改善农作物生产环境,提高作物的产量和质量。
然而,温室环境的控制要求十分复杂,需要保持适宜的温度、湿度、光照等条件,以满足不同作物的生长需求。
为了提高温室农业的效益和生产质量,温室自动化控制系统应运而生。
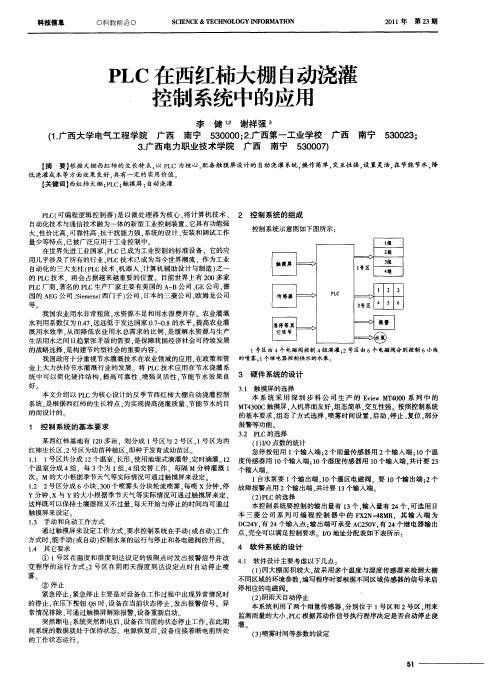
二、温室自动化控制系统的组成温室自动化控制系统主要由传感器、执行器、控制器和人机界面四部分组成。
其中,传感器用于采集温室内外的环境参数,如温度、湿度、光照强度等;执行器负责根据控制信号调整温室内的环境条件;控制器对传感器采集的数据进行处理,并根据预设的控制算法产生相应的控制信号;人机界面用于操作和监控温室自动化控制系统的运行状态。
三、温室自动化控制系统的功能要求温室自动化控制系统的功能要求包括环境监测、环境调控和数据记录等。
首先,系统应能够实时监测温室内外的环境参数,并对其进行准确的测量和分析。
其次,系统应能够根据预设的控制算法,自动调整温室内的环境条件,以满足作物的生长需求。
最后,系统应能够记录和存储温室内外环境参数的数据,并提供相应的数据查询和分析功能,以便于农业生产管理和决策的参考。
四、温室自动化控制系统的设计温室自动化控制系统的设计主要包括硬件设计和软件设计两个方面。
在硬件设计方面,需要选择适用的传感器和执行器,并设计相应的电路结构和电气连接。
在软件设计方面,需要编写控制算法和相应的人机界面程序,实现温室环境的实时监测、自动调控和数据记录等功能。

大棚浇灌系统方案一、引言大棚是一种用于种植蔬菜、花卉等作物的控制环境设施。
为了提高大棚内作物的生长效果,自动化浇灌系统变得越来越受到农民的青睐。
本文将介绍一种大棚浇灌系统方案,该方案可以实现自动化的浇灌作业,提高浇灌效率,节约水资源。
二、系统组成大棚浇灌系统主要由以下几个组件组成:1.水泵:负责将水从水源中抽取出来,并提供足够的水压用于浇灌。
2.管道系统:将水泵抽取的水通过管道输送到各个浇灌点。
3.喷头:位于浇灌点,负责将水喷洒到作物上。
4.传感器:用于监测土壤湿度、温度和光照强度等环境参数。
5.控制器:根据传感器的反馈信息,控制水泵的开关,实现自动化浇灌。
三、系统工作原理大棚浇灌系统的工作原理如下:1.控制器启动后,通过传感器监测当前环境参数。
2.如果土壤湿度低于设定阈值,控制器发送信号给水泵,启动水泵开始浇灌。
3.当土壤湿度达到设定阈值时,控制器发送信号给水泵,关闭水泵停止浇灌。
4.控制器周期性地获取传感器的数据,根据实时环境参数调整浇灌策略。
系统具体的工作流程如下图所示:graph LRA[启动] --> B[传感器监测]B --> C[判断土壤湿度]C -- 湿度低 --> D[启动水泵]C -- 湿度达标 --> E[关闭水泵]E -- 重复 --> B四、系统优势大棚浇灌系统的方案具有以下几个优势:1.节约水资源:通过自动控制浇灌策略,系统能够根据实时环境参数合理利用水资源,避免浪费。
2.提高浇灌效率:系统能够根据作物生长需要,及时浇灌,保持土壤湿度适宜,提高作物生长效果。
3.方便操作:系统自动化程度高,农民只需设置好参数和时间段,系统即可自动进行浇灌作业,节省人力成本。
4.灵活可扩展:系统可以根据实际需要增加传感器、喷头等组件,满足不同作物的浇灌需求。
五、系统注意事项在使用大棚浇灌系统时,需要注意以下几个事项:1.合理设置浇灌策略:根据作物对水分的需求,合理设置浇灌间隔和水量,避免浇水过多或过少。

农业科技智能灌溉与温室控制系统方案第一章绪论 (2)1.1 项目背景 (2)1.2 目标与意义 (2)1.3 技术路线 (3)第二章智能灌溉系统设计 (3)2.1 系统总体架构 (3)2.2 硬件设计 (3)2.3 软件设计 (4)第三章温室控制系统设计 (4)3.1 系统总体架构 (4)3.2 硬件设计 (5)3.3 软件设计 (5)第四章数据采集与处理 (6)4.1 传感器选型与布局 (6)4.2 数据传输 (6)4.3 数据处理与分析 (7)第五章智能决策与控制 (7)5.1 灌溉策略制定 (7)5.2 温室环境控制策略 (7)5.3 决策支持系统 (8)第六章系统集成与测试 (8)6.1 系统集成 (8)6.2 功能测试 (9)6.3 功能测试 (9)第七章经济效益分析 (10)7.1 投资成本 (10)7.2 运营成本 (10)7.3 收益分析 (10)第八章社会效益分析 (11)8.1 环境保护 (11)8.2 农业产业升级 (11)8.3 农民增收 (12)第九章市场前景分析 (12)9.1 市场需求 (12)9.2 竞争态势 (12)9.3 发展趋势 (13)第十章结论与展望 (13)10.1 工作总结 (13)10.2 存在问题与改进方向 (13)10.3 未来展望 (14)第一章绪论1.1 项目背景我国社会经济的快速发展,农业作为国民经济的基础产业,其现代化水平日益被重视。
我国农业科技水平不断提高,设施农业得到了广泛应用。
智能灌溉与温室控制系统作为设施农业的重要组成部分,对于提高农业生产效率、降低资源消耗、保护生态环境具有重要作用。
但是当前我国农业灌溉与温室控制技术尚存在一定程度的不足,主要体现在水资源利用效率低、生产成本高、温室环境调控不准确等方面。
因此,研究并开发一套农业科技智能灌溉与温室控制系统方案具有重要意义。
1.2 目标与意义本项目旨在研究并开发一套适用于我国农业生产的智能灌溉与温室控制系统,主要目标如下:(1)提高水资源利用效率,减少浪费。

构建以物联网为基础的温室自动化浇灌系统改进方案摘要:温室自动化浇灌系统是现代农业中的一项重要技术,它能够实现对温室环境、作物生长状态的实时监测和调控。
本文基于物联网技术,提出了一种改进方案,旨在解决传统温室自动化浇灌系统存在的问题,并优化系统性能,提高浇灌效果。
1.引言随着农业生产的发展,温室种植在全球范围内得到了广泛应用。
温室自动化浇灌系统作为温室种植管理的重要组成部分,直接影响作物的生长和产量。
然而,传统的温室自动化浇灌系统存在着一些问题,例如:浇灌方式单一、浇灌时间不可调节、实时监测和调控能力较弱等。
为了解决这些问题,本文提出了一种基于物联网的温室自动化浇灌系统改进方案。
2.改进方案设计2.1 系统架构设计本方案将物联网技术应用于温室自动化浇灌系统中,构建了一个分布式智能控制系统。
该系统由多个节点组成,每个节点负责一个或多个温室的浇灌控制。
各个节点通过无线网络互相连接,实现数据传输和控制指令的交互。
2.2 环境监测和作物生长状态监测改进方案引入多种传感器,用于实时监测温室内的环境参数和作物生长状态。
温度、湿度、光照、二氧化碳浓度等环境参数的监测可以帮助农民了解温室内的气候情况,及时调整浇灌控制策略。
作物生长状态的监测可以实现对作物的生长情况进行实时评估,根据不同生长阶段的需求进行精准浇灌。
2.3 智能浇灌控制算法本方案采用基于反馈的控制算法,通过实时监测数据对浇灌量和浇灌时间进行动态调整。
根据温室内的环境参数和作物生长状态,系统可以自动调整浇灌量,确保作物的水分需求得到满足。
同时,系统还可以根据预设的生长阶段参数,调整浇灌时间,实现灵活可调的浇灌策略。
3.系统特点3.1 自动化控制:改进方案引入物联网技术,实现了温室浇灌系统的自动化控制,减轻了农民的劳动负担。
3.2 精准浇灌:通过环境监测和作物生长状态监测,系统可以根据实时数据精确调节浇灌量和浇灌时间,避免了过浇或欠浇的问题。
3.3 实时监测和远程控制:改进方案通过物联网技术,实现了对温室环境和作物生长状态的实时监测,并支持远程控制,农民可以通过手机或电脑监测和调控温室浇灌。
基于PLC控制的大棚自动灌溉系统设计摘要:本文基于PLC控制的大棚自动灌溉系统设计,实现了对水源与设备的智能控制和自动化管理。
该系统采用先进的PLC编程和传感器监测技术,实现了对大棚内环境和作物水分状态的实时监控和反馈,并在此基础上进行灌溉控制。
通过系统实验与观测数据分析,验证了PLC控制系统的可靠性和有效性,为现代农业生产的自动化和科技化管理提供了一种有效的技术手段。
关键词:PLC;大棚自动灌溉系统;智能控制;自动化管理1、绪论随着农业生产技术的不断进步和新技术的广泛应用,农业生产管理的自动化和智能化已成为当前农业发展的趋势。
传统农业生产管理方式存在人工操作不便、效率低下、设备使用寿命短等问题,难以满足农业生产的高效、高质量和高收益的要求。
因此,开发一种新的农业生产管理方法,集成先进的信息技术、传感器技术和控制技术,实现自动化、智能化的农业生产管理,已成为当前农业领域的重要研究课题。
而大棚自动灌溉系统作为一种典型的农业生产自动化技术,具有广泛的应用前景和重要的研究价值。
大棚自动灌溉系统作为一种利用现代控制技术和传感器技术实现对水源和设备的智能控制和自动化管理的系统,具有水资源利用高效、作物质量优良、成本降低等优点,因此广受农民的欢迎和重视。
本文针对大棚自动灌溉系统的技术应用和研究,基于PLC控制技术,设计了一种自动灌溉系统,并进行了系统实验与数据分析,验证了该系统的可靠性和有效性,为农业生产的自动化和科技化管理提供了一种有效的技术手段。
2、系统设计2.1 系统结构大棚自动灌溉系统主要由水源系统、控制系统、灌溉装置和作物生长环境监测系统组成。
其中,水源系统通过水池引入自来水或地下水进行蓄水、过滤等处理,以保证灌溉水质的干净卫生。
控制系统则采用PLC编程技术和传感器监测技术,对大棚内环境和作物水分状态进行实时监控和反馈,并在此基础上进行灌溉控制。
灌溉装置则采用喷雾灌溉、滴灌等方式进行水分供应,以满足作物水分需求。
温室大棚微灌系统介绍作者:李光永来源:《农民科技培训》2008年第03期一、微灌的种类与优缺点(一)微灌的种类微灌是利用微灌设备组装成微灌系统,将有压水输送分配到田间,通过灌水器以微小的流量湿润作物根部附近土壤的一种局部灌水技术。
用于温室大棚的微灌系统主要有滴灌和微喷灌两种。
1.滴灌滴灌是利用安装在末级管道(称为毛管)上的滴头,或与毛管制成一体的滴灌带(管)将压力水以水滴状湿润土壤的一种灌水技术。
通常将毛管和灌水器放在地面,也可以把毛管和灌水器埋入地面以下30~40厘米。
前者称为地表滴灌,后者称为地下滴灌。
每个灌水器的流量一般为2~12升/小时。
2.微喷灌微喷灌是利用直接安装在毛管上,或通过直径4毫米塑料管与毛管连接的微喷头,将压力水以喷洒状湿润土壤的一种灌水技术。
微喷头有折射式和旋转式两种,前者喷射范围小,水滴小,是一种雾化微喷灌;后者喷射范围较大,水滴也大。
微喷头的流量通常一般为20~250升/小时。
(二)微灌的优缺点温室大棚采用微灌与传统地面灌溉(畦灌)相比,具有以下优点:降低室内空气湿度。
由于微灌除了作物根部湿润外,其它地方始终保持干燥,因而大大减小了地面蒸发。
一般情况下室内空气相对湿度下降20%左右。
灌水均匀。
微灌系统能够做到有效地控制每个灌水器的出水流量,因而灌水均匀度高,一般可达80%~90%。
节省劳力。
微灌是管网供水,操作方便,而且便于自动控制,因而可明显节省劳力。
同时微灌是局部灌溉,大部分地表保持干燥,减少了杂草的生长,也就减少了用于除草的劳力。
地温降幅很小。
微灌的运行方式是采用浅灌勤灌的方式,每次灌水量很小,因而几乎不会引起地温下降。
提高水肥利用率。
微灌可以结合施肥,适时适量地将水和营养成分直接送到作物根部,提高了水和肥料利用率。
减少病虫害的发生。
微灌可以降低室内的空气湿度,使与湿度有关的病虫害得以大幅度下降。
同时降低了防止病虫害的农药使用量,减少蔬菜农药残留量,提高了蔬菜品质。
关于温室滴灌施肥智能化控制系统的研究1 系统功能托普物联网自2008年,开始着手农业物联网的研发和推广,已经成功做过不少的案例,并且现在和浙江大学合作,有着强大的技术支持,和推广团队,托普物联网力致于做物联网领头军,将中国农业发展愿望实现。
温室滴灌施肥智能化控制系统包括FICS-1型(用于现代温室)和FICS-2型(用于普通温室)两种类型,系统主要实现以下功能。
(1)人工干预灌溉施肥功能:根据用户设定的不同作物多个阀门的灌溉施肥参数,可实现一次性多个阀门的自动灌溉施肥控制。
(2)定时定量灌溉施肥功能:根据用户设定的不同作物多个阀门的灌溉施肥参数,系统可实现一个月内多个阀门的自动灌溉施肥控制。
(3)条件控制灌溉施肥功能:利用土壤水势传感器监测土壤的含水量,实现多个阀门的全自动灌溉施肥控制。
(4)过滤器反冲洗功能:当自冲洗过滤器两端的压差达到设定压力时,计算机可自动控制过滤器逐一进行冲洗。
(5)多种控制方式的穿插和记忆保存功能:控制方式的优先级别顺序为过滤器反冲洗>人工干预>定时定量=条件控制。
(6)灌溉施肥信息的统计、查询、打印功能。
(7)温室内外环境因子的实时监测功能。
(8)系统运行状态的动态显示功能。
(9)系统传感器的通断选择及校正功能。
(10)系统的报警及安全保护功能。
(11)田间电磁阀的任意分组功能。
(12)水泵恒压变频控制功能。
2 系统总体设计2.1 系统设计参数温室滴灌施肥智能化系统的主要设表1。
系统设计参数表计参数见表12.2 系统构成温室滴灌施肥智能化控制系统由控制计算机、首部管路系统、一次传感器和田间滴灌系统四部分构成,系统构成框图见图1。
图1 系统构成图2.3 首部管路系统设计首部管路系统由过滤装置、灌溉控制管路、计量设备、混肥控制管路和营养液母液组成, FICS-1型和FICS-2型系统的首部管路分别如图2和图3所示。
两种结构形式的不同点是混肥控制管路部分, FICS-1型的水肥混合是在混肥桶内进行的, FICS-2型的水肥混合是直接在系统首部主管道内进行的,不同的混肥方式,其控制方法也不尽相同。
第6期(总第211期)2018年12月机械工程与自动化M E C HA N I C A L ㊀E N G I N E E R I N G㊀&㊀A U T OMA T I O NN o .6D e c .文章编号:1672G6413(2018)06G0165G02基于P L C 控制系统的温室灌溉系统设计李雅静,孟㊀慧,张小青(咸阳师范学院物理与电子工程学院,陕西㊀咸阳㊀712000)摘要:水资源匮乏是当今面临的重大问题之一,农业生产用水量大更突显节水农业的重要性,因此温室灌溉自动化成为一个研究方向.设计了一个可以根据不同植物对水的需求来进行分类分量灌溉的自动控制装置,以S 7G200P L C 为控制器,采用水位节点控制和时钟控制以及湿度传感器,实现对水生植物及土壤植物的智能化灌溉.关键词:温室灌溉;P L C ;控制系统;设计中图分类号:T P 273㊀㊀㊀文献标识码:A咸阳师范学院专项科研基金项目(12X S Y K 016)收稿日期:2018G02G15;修订日期:2018G10G17作者简介:李雅静(1983G),女,河北迁安人,讲师,硕士,主要从事可编程自动控制的教学与研究.0㊀引言国外温室灌溉系统的研究和开发起步较早,灌溉系统节水性能好,稳定性高.国外的研究方法主要是以土壤水分控制作为温室灌溉的主要控制手段,有时还结合一些其他环境因素或作物本身的状况,比如水分蒸发量㊁土壤水分含量㊁空气水分含量和光照强度等.和国外比较健全的控制系统相比较,我国的控制灌溉处于起步阶段,没有成熟的产品,因此研发和我们国家实际情况相贴切的温室控制灌溉系统有着很大的现实意义.1㊀温室灌溉控制系统硬件设计本系统主要由P L C ㊁A /D 转换模块㊁土壤湿度传感器㊁水位传感器㊁执行机构和报警装置构成.温室灌溉控制系统硬件工作原理框图如图1所示,对于土壤植物和水生植物工作原理略有不同.图1㊀温室灌溉控制系统硬件工作原理框图1.1㊀P L C 的选择系统采用西门子S 7G200P L C 作为控制器,其中的C P U 224含有14个输入端子㊁10个输出端子,同时可外接相应扩展模块,能满足系统的控制要求.1.2㊀土壤湿度传感器的选择本系统采用目前比较流行的F D R 型土壤湿度传感器H A 2001.F D R ,它利用电磁脉冲原理,根据电磁波在介质中的传播频率来测量土壤的表观介电常数,从而得到土壤容积含水量,具有简便安全㊁快速准确㊁定点连续㊁自动化㊁宽量程㊁少标定等特点.1.3㊀水位传感器的选择本系统采用投入式水位传感器D A T A G51系列,水位传感器将感受到的水位信号传送到控制器,控制器内的计算机将实测的水位信号与设定信号进行比较,得出偏差,然后根据偏差的性质向给水电动阀发出 开 ㊁ 关 指令,保证容器达到设定水位.1.4㊀A /D 转换器的选择根据本系统对输入量的要求,采用E M 231模拟量输入模块,将现场由传感器检测而产生的连续的模拟量信号转换成P L C 的C P U 可以接收的数字量,为12位二进制数,数字量位数越多的模块分辨率就越高.2㊀温室灌溉控制系统软件设计2.1㊀水生植物灌溉设计水生植物要求其水平面必须保持在一定范围内,通过投入式水位传感器感受水位信号,将其传送到控制器与设定信号最小值和最大值相比较,根据偏差向给水电动阀发出 开 ㊁ 关 指令,保证水位达到设定范围,水位低于设定最小值时报警指示灯亮.水生植物灌溉流程如图2所示.2.2㊀土壤植物灌溉设计土壤植物要求其土壤中含水量必须保持在一定范围内,通过土壤传感器检测土壤湿度含量,将其传送到控制器与设定信号最小值和最大值相比较,根据偏差向给水电动阀发出 开 ㊁ 关 指令,保证土壤湿度达到设定范围,土壤含水量低于设定最小值时报警指示灯亮.土壤植物灌溉流程如图3所示.图2㊀水生植物灌溉流程图3㊀土壤植物灌溉流程2.3㊀定时灌溉设计水生植物和土壤植物还可以选择定时灌溉模式,本文提供两种灌溉方式,可根据不同植物生长环境特性自由选择.第一种每天白天从6:00到6:03或晚上20:00到20:03进行浇灌;第二种每隔一天当晚上光敏开关响应时进行浇灌浇水2m i n.定时灌溉流程如图4所示.3㊀结束语本文设计了一个可以根据不同植物对水的需求来分类分量进行灌溉的自动控制装置.本设计以S7G200P L C为核心控制器,采用水位传感器㊁湿度传感器和时钟控制,实现了对水生植物及土壤植物的智能化灌溉.图4㊀定时灌溉流程参考文献:[1]㊀南纪琴,宋毅夫,肖俊夫,等.温室灌溉技术的发展[J].节水灌溉,2013(9):85G89.[2]㊀王智乾,柯建宏.基于P L C模糊控制的温室灌溉控制策略研究[J].浙江农业科学,2011(6):1428G1432.[3]㊀赵德奇.基于P L C的现代农业温室灌溉系统设计[J].农机使用与维修,2013(9):17G18.[4]㊀张争刚,熊刚.单片机技术在温室灌溉系统中的应用[J].自动化与仪器仪表,2016(7):33G35.[5]㊀杜云明,盖丽娜,颜兵兵.基于单片机的温室灌溉控制系统设计[J].农机化研究,2012,34(12):88G91.[6]㊀刘华,张侃谕.基于P CGB a s e的温室灌溉实验控制系统的开发[J].自动化仪表,2009,30(10):19G22.[7]㊀崔天时,杨广林,刘磊,等.基于模糊控制的温室灌溉控制系统的研究[J].农机化研究,2010,32(3):84G86.[8]㊀蔚继承,李书琴,杨丽丽.数据推送技术在温室灌溉控制管理中的应用[J].湖北农业科学,2014,53(18):4441G4444,4459.[9]㊀夏洪,林刚勇,朱兆优,等.一种P L C控制的自动灌溉系统[J].机床与液压,2007(7):64G65,28.D e s i g no fG r e e n h o u s eP l a n t I r r i g a t i o nS y s t e mB a s e d o nP L CL IY aGj i n g,M E N G H u i,Z H A N GX i a oGq i n g(D e p a r t m e n t o f P h y s i c s&E l e c t r o n i cE n g i n e e r i n g,X i a n y a n g N o r m a lU n i v e r s i t y,X i a n y a n g712000,C h i n a)A b s t r a c t:W a t e r s c a r c i t y i s o n e o f t h em a j o r p r o b l e m s f a c i n g t h ew o r l d t o d a y.T h e i m p o r t a n c e o fw a t e rGe f f i c i e n t a g r i c u l t u r e i s u n d e r s c o r e d b y t h e h i g hw a t e r c o n s u m p t i o n i n a g r i c u l t u r a l p r o d u c t i o n.S o t h e a u t o m a t i o n o f g r e e n h o u s e i r r i g a t i o n b e c o m e s a r e s e a r c h a r e a.I n t h i s p a p e r,a n a u t o m a t i c c o n t r o l d e v i c ew a s d e s i g n e dw h i c h c o u l d b e u s e d f o r i r r i g a t i o n a c c o r d i n g t o t h ew a t e r d e m a n d o f d i f f e r e n t p l a n t s.T h i s d e s i g n t a k e s S7G200P L Ca s c o n t r o l l e r,u s e sw a t e r l e v e l n o d e c o n t r o l a n dc l o c kc o n t r o l,a sw e l l a sh u m i d i t y s e n s o r,r e a l i z e s t h e i n t e l l i g e n t i r r i g a t i o n t o a q u a t i c p l a n t a n d s o i l p l a n t.K e y w o r d s:g r e e n h o u s e i r r i g a t i o n;P L C;c o n t r o l s y s t e m;d e s i g n661 机械工程与自动化㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2018年第6期㊀。