基于RecurDyn和MATLAB的链传动仿真系统
- 格式:pdf
- 大小:2.13 MB
- 文档页数:3
195电力电子Power Electronic电子技术与软件工程Electronic Technology & Software Engineering●基金项目:国防科技创新工程项目;项目编号:12050005。
1 引言混合动力电驱动履带车辆由于其采用了发动机-发电机组、动力电池和超级电容供电,具备良好的机动性能、静音行驶能力、灵活的空间布置以及较低的燃油消耗等优势,同时可以为电磁炮、激光武器、电装甲等新型装备的应用提供可靠的用电保障,逐渐成为了未来履带车辆的重要研究发展方向[1-2]。
为满足车辆转向、爬坡以及高速行驶需求,履带车辆双侧独立电驱动方案对驱动电机的功率密度、峰值扭矩和调速范围具有较高的要求[3],为降低驱动电机的设计难度,本文提出了一种新型的分布式电驱动履带车辆结构方案,该方案采用主动轮和负重轮协同驱动车辆行驶。
根据车辆的性能指标对电驱动系统各部件进行了参数匹配,并对匹配结果进行了机电联合仿真校验。
2 分布式电驱动履带车辆方案设计以某型履带装甲底盘为基础,开展分布式电驱动履带车辆方案设计。
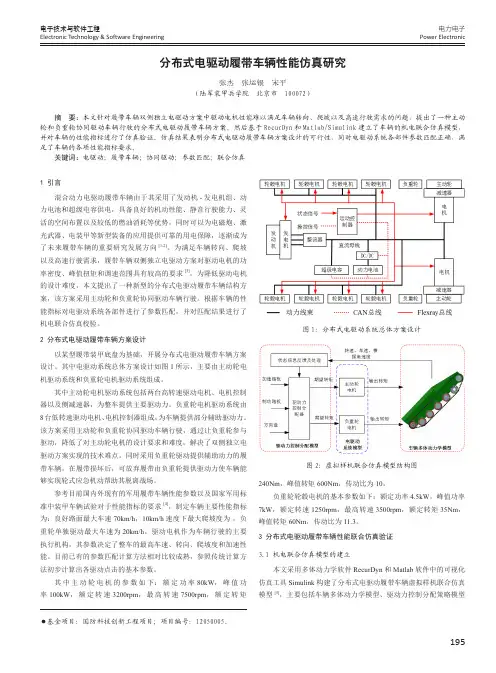
其中电驱动系统总体方案设计如图1所示,主要由主动轮电机驱动系统和负重轮电机驱动系统组成。
其中主动轮电机驱动系统包括两台高转速驱动电机、电机控制器以及侧减速器,为整车提供主要驱动力。
负重轮电机驱动系统由8台低转速驱动电机、电机控制器组成,为车辆提供部分辅助驱动力。
该方案采用主动轮和负重轮协同驱动车辆行驶,通过让负重轮参与驱动,降低了对主动轮电机的设计要求和难度,解决了双侧独立电驱动方案实现的技术难点。
同时采用负重轮驱动提供辅助动力的履带车辆,在履带损坏后,可放弃履带由负重轮提供驱动力使车辆能够实现轮式应急机动帮助其脱离战场。
参考目前国内外现有的军用履带车辆性能参数以及国家军用标准中装甲车辆试验对于性能指标的要求[4],制定车辆主要性能指标为:良好路面最大车速70km/h ,10km/h 速度下最大爬坡度为 ,负重轮单独驱动最大车速为20km/h 。
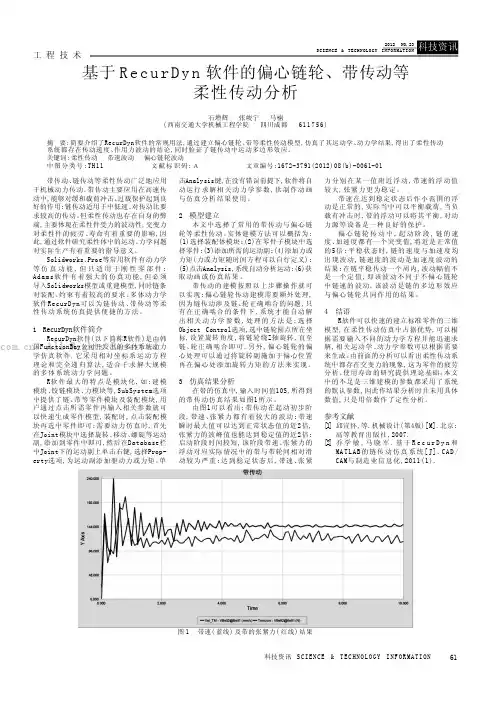
61科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 程 技 术带传动、链传动等柔性传动广泛地应用于机械动力传动。
带传动主要应用在高速传动中,能够对缓和载荷冲击、过载保护起到良好的作用;链传动适用于中低速、对传动比要求较高的传动。
但柔性传动也存在自身的弊端,主要体现在柔性件受力的波动性,交变力对柔性件的疲劳、寿命有着重要的影响,因此,通过软件研究柔性体中的运动、力学问题对实际生产有着重要的指导意义。
Solidworks、Proe等常用软件有动力学等仿真功能,但只适用于刚性零部件;Ad am s软件有着强大的仿真功能,但必须导入Solidworks模型或重建模型,同时链条对装配、约束有着较高的要求。
多体动力学软件RecurDyn可以为链传动、带传动等柔性传动系统仿真提供便捷的方法。
1 RecurDyn软件简介RecurDyn软件(以下简称R软件)是由韩国FunctionBay公司开发出的多体系统动力学仿真软件,它采用相对坐标系运动方程理论和完全递归算法,适合于求解大规模的多体系统动力学问题。
R软件最大的特点是模块化,如:建模模块、铰链模块、力模块等,SubSystem选项中提供了链、带等零件模块及装配模块,用户通过点击所需零件再输入相关参数就可以快速生成零件模型,装配时,点击装配模块再选中零件即可;需要动力仿真时,首先在Joint模块中选择旋转、移动、螺旋等运动副,添加到零件中即可,然后在Database栏中Joint下的运动副上单击右键,选择Prop-erty选项,为运动副添加驱动力或力矩。
单击Analysis键,在没有错误前提下,软件将自动运行求解相关动力学参数,供制作动画与仿真分析结果使用。
2 模型建立本文中选择了常用的带传动与偏心链轮等柔性传动。
实体建模方法可以概括为:(1)选择装配体模块;(2)在零件子模块中选择零件;(3)添加所需的运动副;(4)添加力或力矩(力或力矩随时间方程可以自行定义);(5)点击Analysis,系统自动分析运动;(6)获取动画或仿真结果。
第1篇一、实验背景齿轮作为机械传动系统中的重要组成部分,其性能直接影响着整个系统的效率和寿命。
为了提高齿轮设计的准确性和可靠性,本研究采用有限元分析(FEA)和刚柔耦合动力学仿真(Rigid-Flexibility Coupling)方法,对齿轮进行仿真耦合实验,以评估齿轮在实际工作条件下的力学行为和性能。
二、实验目的1. 建立齿轮的有限元模型,并进行网格划分。
2. 通过有限元分析,计算齿轮在静态载荷作用下的应力分布和变形情况。
3. 利用刚柔耦合动力学仿真,模拟齿轮在实际工作条件下的动态响应。
4. 分析齿轮的疲劳寿命和强度性能,为齿轮设计和优化提供理论依据。
三、实验方法1. 有限元模型建立与网格划分首先,根据齿轮的实际尺寸和材料属性,建立齿轮的几何模型。
然后,采用四面体网格对齿轮进行网格划分,确保网格质量满足仿真要求。
2. 静态载荷下的有限元分析在有限元分析中,将齿轮置于静态载荷作用下,通过求解非线性方程组,得到齿轮的应力分布和变形情况。
主要关注齿轮的齿面接触应力、齿根应力、齿面磨损和齿面疲劳寿命。
3. 刚柔耦合动力学仿真为了模拟齿轮在实际工作条件下的动态响应,采用刚柔耦合动力学仿真方法。
将齿轮视为柔性体,同时考虑齿轮与轴承、轴等部件的相互作用。
通过施加转速和扭矩等激励,模拟齿轮在旋转过程中的动态响应。
4. 疲劳寿命和强度性能分析在仿真过程中,对齿轮的疲劳寿命和强度性能进行分析。
通过计算齿面接触应力、齿根应力等参数,评估齿轮的疲劳寿命和强度性能。
四、实验结果与分析1. 静态载荷下的应力分布和变形通过有限元分析,得到齿轮在静态载荷作用下的应力分布和变形情况。
结果表明,齿轮的齿面接触应力主要集中在齿根附近,齿根应力较大。
同时,齿轮的变形主要集中在齿面和齿根处。
2. 刚柔耦合动力学仿真结果通过刚柔耦合动力学仿真,模拟齿轮在实际工作条件下的动态响应。
结果表明,齿轮的齿面接触应力、齿根应力等参数在旋转过程中发生变化,但总体上满足设计要求。
recurdyn常用函数
recurdyn是一个用于模拟和分析递归动态系统的MATLAB 工具箱。
它提供了一组函数来帮助用户创建、分析和可视化递归动态系统的行为。
以下是一些常用的recurdyn函数:
1.rdyn: 这是创建递归动态系统的基本函数。
它允许用户定义系统的状态方程、初
始条件和参数。
2.step: 该函数用于模拟递归动态系统的瞬态响应。
它会在每个时间步长上更新系
统的状态,并返回模拟结果。
3.bode: 该函数用于计算并绘制递归动态系统的频率响应。
它返回系统的频率响应
数据,并生成相应的频谱图。
4.nyquist: 该函数用于计算并绘制递归动态系统的Nyquist图。
它基于系统的传
递函数或状态方程来计算系统的Nyquist曲线,并生成相应的图像。
5.margin: 该函数用于计算并绘制递归动态系统的稳定性边界。
它返回系统的稳定
性和鲁棒性边界,并生成相应的图像。
6.simulink: 该函数允许用户将recurdyn系统嵌入到MATLAB Simulink 模型
中,以便进行仿真和分析。
这些函数只是recurdyn工具箱中的一部分,还有许多其他功能和函数可用于模拟和分析不同类型的递归动态系统。
建议查阅MATLAB 的官方文档以获取更详细的信息和示例代码。
履带车辆动力学建模与仿真技术概述杨福威;董震;朱强【摘要】履带车辆动力学模型的建立是进行动力学分析、车辆参数设计、车辆结构优化不可或缺的一步.为了能够对履带车辆动力学建模和仿真方法具有明确的了解和认识,对履带车辆的地面力学模型、平稳性模型、转向动力学模型的发展历程和一些典型建模方法进行介绍.并介绍了车辆动力学常用仿真软件的使用方法和一些仿真思路,对履带车辆仿真的几项关键仿真技术进行了分析.【期刊名称】《农业装备与车辆工程》【年(卷),期】2018(056)006【总页数】5页(P22-26)【关键词】履带车辆;多体动力学;建模;仿真【作者】杨福威;董震;朱强【作者单位】100072北京市中国北方车辆研究所;100072北京市装甲兵工程学院;300161天津市军事交通学院【正文语种】中文【中图分类】U469.6+94;TJ81+0.10 引言履带车辆具有接地比压小、附着性能高、稳定性能好、防护性能强等优点,被广泛运用于农业、建筑、采矿,尤其是军事领域中。
在履带车辆出现后的很长一段时间内,由于人们缺乏路面特性的认识和对地面力学的研究,履带车辆的设计往往采用“经验+试验”的方法,这就会增加研制成本和周期。
地面力学和计算机仿真技术的发展和完善为履带车辆的研究开发带来了以下变化:(1)根据土壤力学理论和压力-沉陷关系建立道路模型,能够预估履带车辆在不同地面的受力情况。
在硬质路面上,履带与地面是通过接触碰撞产生作用力的,根据地面刚度、阻尼、接触前后的变形量求得接触力。
在松软路面上,基于Bekker理论定义路面,认为土壤具有“记忆”功能,要考虑加载历史[1],每一块履带板与地面之间都会产生广义力。
Janosi和Hanamoto[2]提出了剪切应力和剪切变形的关系模型。
履带与地面之间的相互作用力是履带齿片与地面之间的剪切应力。
(2)将履带车辆视为一个复杂的多刚体系统或刚柔耦合系统。
多刚体系统动力学将系统构件视为不可变形的刚体,研究刚体在外力作用下的运动规律。

基于AMESim和RecurDyn的履带车转向系统联合仿真分析履带车转向系统是指通过对车辆履带进行差速运动以实现转向的一种方式。
其中,AMESim和RecurDyn可以被用于联合仿真分析。
AMESim是一款基于系统动力学理论的多学科仿真软件。
它可以用于建立高度集成的系统模型,包括机械、液压、热、电等方面。
AMESim的仿真代码能够在非常短的时间内执行快速的仿真,并精确地预测系统的动态响应。
RecurDyn则是一款以多体动力学为基础的仿真软件。
RecurDyn建模按照模型的自由度来进行,从而使得模拟结果准确度更高。
同时,RecurDyn也支持封装好的子系统模块,将不同的子系统部分组合在一起,就可以形成一个完整的系统模型。
通过对此两款软件的基本介绍,我们可以得到集成使用AMESim和RecurDyn的履带车转向系统的基本框架。
具体分析如下:首先,根据履带车转向系统的基本工作原理,可以得到系统模型的建模方案。
在这个建模过程中,首先需要考虑的是履带车的运动学模型。
此模型应能够描述履带车行驶过程中的速度、方向变化以及需要控制的转向系统参数。
这一部分的具体建模涉及方程的推导,可以采用MATLAB或Simulink等工具来实现。
接下来,需要建立由AMESim编制的动力学模型。
此模型描述了系统的物理动态行为,如机械运动、传感器输出、力和驱动器输入。
在AMEsim中,需要将此系统分解为各个子系统或组件,例如电动机、输出轴、减速器和传感器等。
此外,还要考虑与系统相连的其他元素,例如电池、控制器和采样器等。
然后,在RecueDyn中,需要创建由AMESim导出的子系统模型。
这个模型包括运动学、动力学和控制元素。
当模型被创建后,可以将其导出为一个单独的模块,并集成到RecurDyn模型中。
ReucrDyn还提供了一个工具箱,用于模拟诸如差速器、转向节和驱动轴等履带车系统的运动。
通过这些工具箱,可以实现对整个系统的仿真分析,以得到实时的物理行为和响应。
Ansys多体动力学仿真软件:RecurDYN介绍Ansys 多体动力学仿真软件:RecurDYN 介绍传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决的远远不够完善,其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,FunctionBay Inc.充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn 软件,具有令人震撼的求解速度与稳定性,成功地解决机构接触碰撞中的上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn 不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
特色功能强健的隐式积分器和混合积分器 ?相对坐标和递归算法,求解快速稳定 ?多种接触方式,柔性体的接触碰撞 ?柔性体分析,包括大变形、非线性 ?多级子系统 ?图层管理 ? 完全windows 风格客户价值相对坐标系的运动方程,完全递归算法及强健的求解器,使RecurDYN 具有飞驰般的求解速度 ?完全的基于WINDOWS 开发的软件,操作界面友好,易学易用 ?装配自动化,大大减少人工工作量,提高了效率 ?求解稳定可靠,结果令人信服 ?可在最短的时间内修正设计方案,极大的缩短产品的设计周期 ?专用工具包,针对特定应用,为用户量身定制? Solid,前后处理模块广州有道科技培训中心 h t t p ://w w w .020f e a .c o m2D、3D 模型建立;可读取各种CAD 格式的模型文件;可调式的彩色显示功能显示系统/子系统结构,具有子系统模块化功能;提供图层结构管理;模型参数化;灵敏度分析,实验设计分析(DOE);客户化界面;图表;动画;曲线编辑器;数据过滤器;傅立叶变换,多视窗分割显示;可输入外部数据文件。
Solver,求解器完全递归式方程结构;数值运算器DDASSL/IMGALPHA;数值阻尼可适应性自动化,去除数值上的杂讯;可进行批处理运算;可调整CPU 的优先使用权,加速分析执行;内建轮胎/路面力(TIRE)模块;非线性梁、板单元;提供完整的2D/3D(曲面与曲面)接触分析。
关于RecurDyn履带仿真的一些问题和解决方案由于课题需要,急需一款多体动力学软件做履带车辆仿真,由于Adams的A TV模块属于商业化模块,极其难找,所以转向RecrDyn的使用上,参考教材是焦晓娟编著的《RECURDYN多体系统优化仿真技术》(群文件中可找到,教材用的软件版本是V7)。
书中有LM(低速履带模块)的实例教程,步骤非常详细,并不难,但缺乏详细的讲解,只能照猫画虎,结果问题百出,求解器各种报错,访遍各大引擎论坛,用尽各种手段仍然找不到头绪(RD现状,参考资料实在太少)。
在一筹莫展之际,偶然进入RecurDyn高校技术QQ 群,在群主罗老师的帮助下,各种问题顺利解决,群主很强大,一直耐心的指导我,帮我看模型,给我提出问题所在和宝贵建议,真的十分感谢其无私的帮助和分享。
本着本群互相学习,互相交流的精神,将我碰到的各种问题和解决方法整理了一下,与各位一起分享,希望有用到此模块的可以有所借鉴,少走弯路。
不多说,问题来了。
问题一:导致此问题多半由于履带行走机构设计的不合理。
可能是由于添加惰轮的时候忘了调整宽度,也可能设计的机构无法正常工作或者履带属性中Bushing force中各参数设置不合理而导致的。
只能修改自己的机构进行解决了。
另外注意:设计机构千万要合理细心,否则后面会有麻烦。
问题二:如果要将链轮和履带板等部件改成自己的参数,十有八九都会碰到这个问题,无法有效啮合。
经过反复尝试,给出我的解决方案:如果在最简单的(只有链轮和带轮的结构下)出现报错,试着加个托带轮,并认真调整它的高度。
我建的几个模型都是通过这种办法解决的,如有更好的建议欢迎补充。
另外注意:有可能支重轮和托带轮的纵向位置稍微改变就会导致仿真失败,建议建模时一步一步增加部件,随时仿真验证。
问题三:可以仿真,但是履带穿透链轮或者惰轮。
这个可以通过调整履带属性中Bushing force中各参数试试,实在不行,可以改变机构。
我是通过,增加了链轮齿数,并且将与履带板啮合的齿数调整为2个解决的。
基于MATLAB SIMULINK的电传动履带车辆转向性能仿真鲁连军;孙逢春;翟丽
【期刊名称】《兵工学报》
【年(卷),期】2006(027)001
【摘要】首先采用一种简单可行的电传动方案建立了新的电传动履带车辆模型.然后在对电传动履带车辆转向行驶基本理论分析的基础上,结合鼠笼式异步电机模型及其经典矢量控制方法,分别采用独立式和差速式两种控制方案对电传动履带车辆的转向行驶性能进行了仿真分析.结果表明:采用速度控制可以很好地实现车辆转向;为使扭矩和电流平稳,参考速度应以平缓的方式给定;对不同的转向工况,应采取不同的转向模式;再生转向时产生的再生能量很大,应对其加以充分重视和利用.
【总页数】6页(P69-74)
【作者】鲁连军;孙逢春;翟丽
【作者单位】上海汽车集团股份有限公司,汽车工程研究院,上海,201206;北京理工大学,机械与车辆工程学院,北京,100081;北京理工大学,机械与车辆工程学院,北京,100081
【正文语种】中文
【中图分类】TJ811
【相关文献】
1.基于Matlab与RecurDyn的电传动履带车辆的联合仿真 [J], 赵玉慧;刘春光;臧克茂
2.基于模糊PID算法的双侧电传动履带车辆转向控制策略研究 [J], 陈泽宇;赵广耀;翟丽;周淑文
3.基于横摆角速度负反馈的电传动履带车辆原地转向控制策略 [J], 陈泽宇;赵广耀;翟丽;佟尚锷
4.基于虚拟样机技术的电传动履带车辆特殊运动性能仿真 [J], 王双双;张豫南;颜南明;赵玉慧;张亮
5.电传动履带车辆转向行驶性能仿真分析 [J], 鲁连军;孙逢春;谷中丽
因版权原因,仅展示原文概要,查看原文内容请购买。
基于RecurDyn的摆动导杆机构的运动特性分析王绍清【摘要】汽车空调是汽车舒适性的重要保障之一,汽车空调的功能主要是控制空气流向和分配,其中摆动导杆机构是送风模式控制机构的重要组成部分.建立了摆动导杆机构的三维实体模型,在RecurDyn软件中对摆动导杆机构进行动态分析,得到了机构的位移、速度和加速度等运动参数.分析结果表明:使用RecurDyn软件分析四杆机构运动规律,操作过程简单,仿真结果可信,为机构设计初期方案的筛选和优化提供了理论支持.【期刊名称】《汽车零部件》【年(卷),期】2016(000)002【总页数】3页(P57-59)【关键词】RecurDyn;摆动导杆机构;运动特性分析【作者】王绍清【作者单位】潍坊科技学院机械工程学院,山东潍坊262700【正文语种】中文【中图分类】TP29摆动导杆机构[1-3]是汽车送风模式控制机构的重要组成部分。
其中图解法[4-5]和解析法[6-7]是摆动导杆机构常用的运动分析方法,但只能对构件上特定点的位移、速度和加速度进行分析。
RecurDyn[8-10]是由韩国FunctionBay公司开发出的新一代多体系统动力学仿真软件。
它采用相对坐标系运动方程理论和完全递归算法,使RecurDyn具有飞驰般的求解速度,非常适合于求解大规模的多体系统动力学问题;完全的基于Windows开发的软件,操作界面友好;求解稳定,结果令人信服。
建立了摆动导杆机构的三维模型,利用RecurDyn软件对摆动导杆机构进行了运动仿真,得到了该机构的位移、速度和加速度等运动参数,为设计提供有价值的理论依据。
已知AB=100 mm,AC=350 mm,曲柄AB为原动件,以n=50 r/min匀速转动,初始位置为水平位置。
导杆BC为从动件,通过滑块B将曲柄AB的连续转动变为导杆BC的往复摆动。
如图1所示。
运动仿真模型是进行运动特性分析的数学模型,它为计算提供所有原始数据。
模型的形式直接影响计算精度、计算时间、所需内存大小及计算过程能否完成。
基于MATLABSimulink的机械系统仿真技术基于 MATLAB/Simulink 的机械系统仿真技术在当今科技飞速发展的时代,机械系统的设计和优化变得日益复杂。
为了更高效、准确地预测和分析机械系统的性能,基于MATLAB/Simulink 的机械系统仿真技术应运而生。
这项技术为机械工程师和研究人员提供了强大的工具,帮助他们在实际制造之前,就能对机械系统的行为有深入的了解和准确的预测。
机械系统仿真技术的核心在于通过建立数学模型来模拟真实世界中机械系统的运行。
而 MATLAB/Simulink 作为一款功能强大的数学计算和建模软件,为实现这一目标提供了丰富的资源和便捷的操作环境。
首先,让我们来了解一下 MATLAB/Simulink 的一些基本特点。
MATLAB 具有强大的数值计算和数据分析能力,能够处理复杂的数学公式和算法。
Simulink 则是一个基于图形化的建模环境,用户可以通过拖拽和连接各种模块来构建系统模型,这种直观的操作方式大大降低了建模的难度,提高了工作效率。
在机械系统仿真中,常见的模型类型包括刚体动力学模型、柔性体模型、传动系统模型等。
以刚体动力学模型为例,我们可以使用牛顿定律和欧拉方程来描述物体的运动。
通过在 Simulink 中定义质量、惯性矩、力和力矩等参数,以及它们之间的关系,就能模拟出刚体的运动轨迹和受力情况。
对于复杂的机械系统,如汽车的悬挂系统,不仅需要考虑刚体的运动,还需要考虑弹性元件和阻尼器的特性。
这时,就可以引入柔性体模型。
通过有限元分析等方法,可以将柔性体的模态信息导入到Simulink 中,与刚体模型相结合,从而更真实地反映系统的动态特性。
传动系统也是机械系统中的重要组成部分。
例如,齿轮传动系统的建模需要考虑齿轮的齿数、模数、压力角等参数,以及齿面接触和摩擦等因素。
在 MATLAB/Simulink 中,可以使用专门的模块来构建齿轮传动模型,并与其他部件的模型进行集成,以分析整个传动系统的性能。
RecurDyn (Recursive Dynamic)是由韩国FunctionBay公司开发出的新一代多体系统动力学仿真软件。
它采用相对坐标系运动方程理论和完全递归算法,非常适合于求解大规模的多体系统动力学问题。
传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决得远远不够完善,这其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,韩国Function Bay 公司充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn软件。
该软件具有令人震撼的求解速度与稳定性,成功地解决了机构接触碰撞中上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
鉴于RecurDyn的强大求解功能,软件广泛应用航空、航天、军事车辆、军事装备、工程机械、电器设备、娱乐设备、汽车卡车、铁道、船舶机械及其它通用机械等行业。
RecurDyn给使用者的感觉快速:相对坐标系的运动方程、完全递归算法及强健的求解器使RecurDyn具有飞驰般的的求解速度亲切:完全的基于WINDOWS开发的软件,操作界面友好,易学易用。
可靠:求解稳定,结果令人信服。
RecurDyn的使用效果最短时间内修正设计方案极大的缩短产品设计周期RecurDyn主要特色强大的接触模拟(包括三维的面-面接触)领先的柔性体动力学分析自动建模的专业化工具包成本/性能上的新标准与软件的接口:CAD- Parasolid 几何(Unigraphics,SolidWorks,SolideEdge),Pro/ENGINEERFEA-MSC/NASTRAN,ANSYS,I-DEAS 其它-MATLAB/Simulink(controls),ADAMS(机械系统仿真)RecurDyn的结构RecurDyn/Solid : CAD & 建模, 动画, 后处理RecurDyn/Solver : 刚体& 柔性体RecurDyn/工具包: 柔性体, 线性分析, 汽车, 列车, HM- 履带车, LM-履带车, 链条, 滑轮, 控制器, 电子机械, 水利学, 2DMTT, 3DMTT, 绳索, 等行业应用: 由于RecurDyn强大的求解能力,使得大规模、高复杂度、多碰撞等系统的建模求解成为可能,因而在军事车辆和武器设计上得到广泛应用和认同,尤其在履带式车辆动力学、车辆运动稳定性、过障能力、炮弹发射动力学、人机工程、生存能力等方面,已为韩国、日本军方解决了大量动力学设计问题。